
Abstract
The vibration of a ship pitch-roll motion described by a non-linear spring pendulum system (two degrees of freedom) subjected to multi external and parametric excitations can be reduced using a longitudinal absorber. The method of multiple scale perturbation technique (MSPT) is applied to analyze the response of this system near the simultaneous primary, sub-harmonic and internal resonance. The steady state solution near this resonance case is determined and studied applying Lyapunov’s first method. The stability of the system is investigated using frequency response equations. Numerical simulations are extensive investigations to illustrate the effects of the absorber and some system parameters at selected values on the vibrating system. The simulation results are achieved using MATLAB 7.0 programs. Results are compared to previously published work.
Article PDF
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Abbreviations
- c j (j=1,2,3,4):
-
The damping coefficient of the spring pendulum degree-of-freedom and the absorber (\(c_{j}=\varepsilon\hat{c}_{j})\)
- ω 1,ω 2 and ω 3 :
-
The natural frequency of the spring pendulum and absorber
- α,β :
-
The non-linear parameters (\(\beta =\varepsilon\hat{\beta})\)
- f j :
-
The forcing amplitude of the main system (\(f_{j}=\varepsilon^{2}\hat{f}_{j})\)
- Ω j :
-
The frequencies of the main system
- ε :
-
A small perturbation parameter
- g :
-
Gravity acceleration
- M,m :
-
Masses of spring pendulum and absorber respectively
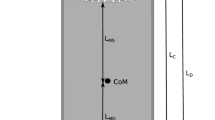
- l :
-
Statically stretched length of the pendulum
- l 1 :
-
Statically stretched length of the absorber
- \(x,\bar{x}\) :
-
Longitudinal response of the spring–pendulum (\(x=\bar{x}/l)\)
- \(u,\bar{u}\) :
-
Longitudinal response of the absorber (\(u=\bar{u}/l)\)
- φ :
-
Angular response of the pendulum
- k 1,k 2 :
-
Linear stiffness of the spring–pendulum and the absorber
- k i (i=3,4,5,6):
-
Spring stiffness of non-linear parameters
References
Mwad DJ (1988) Passive vibration control. Wiley, England
Eissa M (1999) Vibration control of non-linear mechanical system via a neutralizer. Electronic bulletin no 16, Faculty of Electronic Engineering Menouf, Egypt, July
Marzouk OA, Nayfeh AH (2009) Control of ship roll using passive and active anti-roll tanks. Ocean Eng 36:661–671
Tondl A, Nabergoj R (2000) Dynamic absorbers for an externally excited pendulum. J Sound Vib 234(4):611–24
Lee WK (1988) A global analysis of a forced spring–pendulum system. PhD dissertation, University of California, Berkeley
Lee WK, Hsu CS (1994) A global analysis of an harmonically excited spring–pendulum system with internal resonance. J Sound Vib 171(3):335–59
Lee WK, Park HD (1997) Chaotic dynamics of a harmonically excited spring pendulum system with internal resonance. Non-linear Dyn 14:211–229
Lee WK, Park HD (1999) Second order approximation for chaotic responses of a harmonically excited spring–pendulum system. J Non-linear Mech 34:749–57
Eissa M, El-Ganaini WAA (2000) Part I, multi-absorbers for vibration control of non-linear structures to harmonic excitations. ISMV conference, Islamabad, Pakistan
Eissa M, El-Ganaini WAA (2000) Part II, multi-absorbers for vibration control of non-linear structures to harmonic excitations. ISMV conference, Islamabad, Pakistan
Song Y, Sato H, Iwata Y, Komatsuzaki T (2003) The response of a dynamic vibration absorber system with a parametrically excited pendulum. J Sound Vib 259(4):747–759
Eissa M, El-Serafi S, El-Sheikh M, Sayed M (2003) Stability and primary simultaneous resonance of harmonically excited. Appl Math Comput 145:421–442
Eissa M, Sayed M (2006) A comparison between active and passive vibration control of non-linear simple pendulum, part I: transversally tuned absorber and negative \(G\dot{\varphi}^{n}\) feedback. Math Comput Appl 11(2):137–149
Eissa M, Sayed M (2006) A comparison between active and passive vibration control of non-linear simple pendulum, part II: longitudinal tuned absorber and negative \(G\ddot{\varphi}\) and G φ n feedback. Math Comput Appl 11(2):151–162
Sayed M (2006) Improving the mathematical solutions of non-linear differential equations using different control methods. PhD thesis, Department of Mathematics, Faculty of Science, Menoufia, Egypt
Eissa M, Sayed M (2008) Vibration reduction of a three DOF non-linear spring pendulum. Commun Nonlinear Sci Numer Simul 13:465–488
Kamel MM (2007) Bifurcation analysis of a nonlinear coupled pitch–roll ship. Math Comput Simul 73:300–308
El-Sayed AT (2007) Analytical and numerical solutions of coupled non-linear differential equations. MSc thesis, Department of Mathematics, Faculty of Science, Zagazig University, Egypt
Amer YA, El-Sayed AT (2008) Vibration suppression of non-linear system via non-linear absorber. Commun Nonlinear Sci Numer Simul 13:1948–1963
Eissa M, Kamel M, El-Sayed AT (2010) Vibration reduction of multi-parametric excited spring pendulum via a transversally tuned absorber. Nonlinear Dyn. doi:10.1007/s11071-009-9635-4
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Eissa, M., Kamel, M. & El-Sayed, A.T. Vibration reduction of a nonlinear spring pendulum under multi external and parametric excitations via a longitudinal absorber. Meccanica 46, 325–340 (2011). https://doi.org/10.1007/s11012-010-9311-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11012-010-9311-2