
Abstract
The stiffness of myosin heads attached to actin is a crucial parameter in determining the kinetics and mechanics of the crossbridge cycle. It has been claimed that the stiffness of myosin heads in the anterior tibialis muscle of the common frog (Rana temporaria) is as high as 3.3 pN/nm, substantially higher than its value in rabbit muscle (~1.7 pN/nm). However, the crossbridge stiffness measurement has a large error since the contribution of crossbridges to half-sarcomere compliance is obtained by subtracting from the half-sarcomere compliance the contributions of the thick and thin filaments, each with a substantial error. Calculation of its value for isometric contraction also depends on the fraction of heads that are attached, for which there is no consensus. Surprisingly, the stiffness of the myosin head from the edible frog, Rana esculenta, determined in the same manner, is only 60% of that in Rana temporaria. In our view it is unlikely that the value of such a crucial parameter could differ so substantially between two frog species. Since the means of the myosin head stiffness in these two species are not significantly different, we suggest that the best estimate of the stiffness of the myosin heads for frog muscle is the average of these data, a value similar to that for rabbit muscle. This would allow both frog and rabbit muscles to operate the same low-cooperativity mechanism for the crossbridge cycle with only one or two tension-generating steps. We review evidence that much of the compliance of the myosin head is located in the pliant region where the lever arm emerges from the converter and propose that tension generation (“tensing”) caused by the rotation and movement of the converter is a separate event from the passive swinging of the lever arm in its working stroke in which the strain energy stored in the pliant region is used to do work.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
The compliance of crossbridges and filaments impacts strongly on how crossbridges operate to generate tension in muscle contraction. The purpose of this review is to discuss recent studies that have been made of these compliances and to critically review their interpretation. It is not our aim to be critical of the experiments themselves, since most are very elegant, thorough and carefully performed. Rather we wish to draw attention to certain discrepancies in some of the findings that may have gone unnoticed by muscle researchers and offer alternative interpretations which we hope will foster further debate on our understanding of crossbridge action.
Background
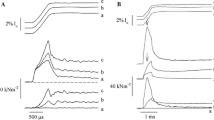
The notion that crossbridges might contain a spring acting as a compliant element that provided the tension for muscle contraction was central to the first model of the crossbridge cycle (Huxley 1957). The first experimental evidence that crossbridges were indeed compliant came from the study by Huxley and Simmons (1971a, b) of the transient tension response of isometrically contracting semitendinosus muscle from Rana temporaria when subjected to rapid (~1 ms) length steps. They found that the tension changed coincident with the length release or stretch from the initial isometric tension T 0 to reach an extreme value T 1 at the end of the step (phase 1) indicating that the sarcomere contained compliant elements. In phase 2 there was a rapid recovery of tension from T 1 to a value T 2 closer to the isometric tension which they attributed to re-equilibration of the tension-generating step(s); after releases, attached myosin heads (crossbridges) execute the forward step, after stretches the reverse step. This early tension recovery was slower but more complete for smaller releases and stretches than for large releases. In phase 3 this early tension recovery slowed or even reversed and in phase 4 there was a slow return to the starting tension T 0. If the experiments were carried out at longer sarcomere lengths, the tension change during the length step as well as the early tension recovery varied in proportion to the extent of filament overlap (Huxley and Simmons 1971b). They therefore considered that the greater part of the instantaneous elasticity resided in the crossbridges themselves and modelled the early tension transient with a crossbridge stiffness of 0.25 pN/nm. They followed this with a detailed study of the anterior tibialis muscle of Rana temporaria at 0–3°C using more rapid (0.2 ms) length steps to reduce the extent to which the tension-generating step occurred during the length step itself (Ford et al. 1977). With these faster length steps, the T 1-length step relation was more nearly linear; although slightly curved concave upwards, the plot intersected the length axis at a finite angle suggesting that the compliant element could be compressed as well as extended and behaved like a linear spring. Recognising that despite the faster length steps, a significant part of the early tension recovery after the larger releases would still have occurred during the length step itself, they showed that the initial slope of the T 1-length relation was independent of the size of the length step; this initial slope intersected the length step axis at −4 nm/hs (half-sarcomere). The T 1-length step plot was later shown to be even more nearly linear when the length steps were faster still (0.12 ms) (Piazzesi et al. 2003). Ford et al. interpreted their results to mean that the attached crossbridges in an isometric contraction had on average a 4 nm strain. By comparing the tension response to rapid length steps at various sarcomere lengths, Ford et al. (1981) considered that stiffness was proportional to the extent of filament overlap. They concluded that at least 90% of the compliance was located in the crossbridges, rather than in other sarcomere structures such as the filament backbones or Z-disc.
Significance of crossbridge compliance
Before it was realised that crossbridges were compliant, it was implicitly assumed that the axial displacement between the origin of a myosin head on the thick filament surface and the site on the actin filament at which that head was attached was constant. Hence if one attached head generated tension by changing its tilt angle or shape, then neighbouring attached heads would necessarily do the same and this movement would be tightly coupled to filament sliding (see for example Huxley 1969). However, the presence of compliance in the crossbridge would allow this axial displacement between the origin of a head and its attachment to actin to vary within limits. It was therefore possible to suppose that crossbridges could generate tension largely independently of one another and of the amount of filament sliding (Huxley and Simmons 1971a). An equally important outcome of the concept of crossbridge compliance was the strikingly simplifying concept that the crossbridge tension was exerted by the spring after it was compressed or extended, its magnitude being determined simply by the product of its stiffness and the strain (Huxley and Simmons 1971a, b; Eisenberg and Hill 1978). This served as a great stimulus to modelling the crossbridge cycle with the aim of simulating the mechanical properties of muscle.
Lever arm swinging and tension generation
Atomic structures of the myosin head obtained by X-ray crystallography (Rayment et al. 1993; Fisher et al. 1995; Smith and Rayment 1996; Dominguez et al. 1998; Houdusse et al. 2000) enabled earlier concepts of how the interaction of myosin heads with actin produced sliding (Huxley 1969; Cooke 1997) to be refined to the atomic level (Holmes 1997; Dominguez et al. 1998; Geeves and Holmes 1999). The myosin head consists of a motor domain, which contains the sites binding nucleotides and actin, joined to a long α-helical lever arm. Crucially, depending on what analogues of ATP or ADP + Pi are bound to the nucleotide site, subtle changes in the surrounding structures are amplified into a large (~70°) rotation of the converter subdomain of the motor domain and the lever arm to which it is connected resulting in an axial movement of the end of the lever arm of ~10 nm. The swinging lever arm hypothesis proposed that the swinging of the lever arm of a myosin head attached to actin was the working stroke responsible for the sliding of filaments. While this hypothesis was first formulated in terms of the swinging of the lever arm producing filament sliding, its scope has often become widened to include the generation of tension (for example Griffiths et al. 2002). However, the exact relation between the swinging of the lever arm and tension generation is still unclear. The swinging of the lever arm (the working stroke) and tension generation are often discussed as if they were synonymous although they may well be separate events. Models in which the angle of the lever arm is a continuum or near-continuum (Huxley et al. 2006a, b) contrast with the switch-like conformational changes seen in the crystallographic studies. In the past, terms such as power stroke have been used both for the tension-generating step and for the lever arm swing thereby blurring the likely distinction between these events. We therefore propose that the term “tensing” should be used as a shorthand for a tension-generating conformational change to highlight its distinction from the swinging of the lever arm in the working stroke. Attached heads will be described as pre-tensing or post-tensing depending on whether they have executed the tensing step. We discuss in our concluding remarks how a consideration of the location of crossbridge compliance illuminates the distinction between the tensing step and the lever arm swing and helps to reconcile different viewpoints.
Independence of crossbridges and low-cooperativity mechanism
The extent to which neighbouring crossbridges can act independently of one anotherFootnote 1 is currently controversial (see Duke 2005, Månsson 2010a supplementary text). We need to consider separately whether the swinging of the lever arms of attached heads are independent, and whether tension generation by the attached heads are independent. If, for example, the lever arms were stiff and the compliance were located in the converter subdomain of the head (see section on location of crossbridge compliance), then, as the filaments slide, the lever arms of the attached heads, although distributed through a range of angles, would necessarily swing at similar speeds, regardless of the tension they were exerting. So in this case the working strokes of the heads would not be independent.
It is widely supposed that some of the steps of the crossbridge cycle are highly strain-dependent, especially the tension-generating step and the subsequent detachment of heads. If the shortening velocity were high, heads after their initial attachment would be rapidly dragged to negative strains where they would rapidly execute the tension-generating step and detach rapidly after further sliding. At low velocities of shortening, heads after their initial attachment would take longer to execute the tension-generating step or indeed not execute this step before detaching. So the kinetics of the crossbridge cycle are greatly dependent on the velocity of filament sliding. Since all attached crossbridges contribute to the total tension which matches the external load, and the velocity of sliding depends on that load, tension generation by the heads can never be completely independent. Nevertheless, if the crossbridge compliance were sufficiently large, the heads could be relatively independent, so each head could complete the tension-generating step whether or not neighbouring heads had undergone this step. We shall refer to this as a low-cooperativity mechanism; the essence of this mechanism is that if there were a single tension-generating step, a head would either be in the pre-tensing conformational state or in the post-tensing conformational state. With such a mechanism, in isometrically contracting muscle only a fraction of the myosin heads would be developing high tension, the remainder exerting little tension. If the mechanism had two tension-generating steps, a third, intermediate, state would also be populated.
Filament compliance and its significance
Since the pioneering studies by Huxley and his colleagues, evidence accumulated that the myosin and actin filament backbones are more compliant than they had supposed. An early indication that filament compliance was significant was that the half-sarcomere compliance in frog fibres was not constant when the sarcomere length was increased over the plateau region of the length-tension relation, a region where the crossbridges remain completely overlapped by actin filaments, but the length of non-overlapped actin filaments alters (Julian and Morgan 1981; Bagni et al. 1990). They concluded that actin filaments contributed 30 or 19% respectively of the sarcomere compliance. Higuchi et al. (1995) also studied the dependence on sarcomere length of half-sarcomere compliance but on rigor rabbit fibres. At sarcomere lengths less than 2.4 μm, fibre compliance decreased indicating that actin filaments contributed as much as 44% to half-sarcomere compliance in isometrically contracting rabbit muscle. That isolated actin or actin-tropomyosin filaments were significantly compliant was also demonstrated by micromanipulation (Kojima et al. 1994); 1 μm long actin filaments had a stiffness of 44 pN/nm, which increased to 65 pN/nm if tropomyosin were bound to the actin. That would correspond to an average strain along a thin filament in isometrically contracting muscle of ~0.5 nm.
Perhaps most decisively, Huxley et al. (1994) and Wakabayashi et al. (1994) showed by X-ray fibre diffraction that when isometrically contracting sartorius or semitendinosus muscles from the bullfrog, Rana catesbeiana, at 10–14°C were stretched or allowed to shorten, the spacings of the M3 myosin meridional reflection and of the actin 2.7 nm meridional reflection (or with less accuracy the 5.9 nm layer line) changed. The average actin spacing increased by 0.23%/T 0 for lengthening and decreased by 0.22%/T 0 for shortening experiments. When muscle is activated there is a marked increase in the spacing of the M3 reflection from 14.3 to 14.5 nm which was regarded as a structural change in the filament backbone whose nature is still unclear (Haselgrove and Huxley 1973; Huxley et al. 1994). This increase in spacing is very rapid and rises with a half-time of ~50 ms (Yagi et al. 1995). With greater time resolution the spacing of the M3 reflection was shown initially to decrease slightly by 0.02–0.03% reaching a minimum at ~8–10 ms when the tension was at a minimum before the large increase in spacing (Yagi 2003). The compliance of the myosin filaments in the active state was determined by varying the tension in lengthening or shortening experiments (Huxley et al. 1994; Wakabayashi et al. 1994). This myosin spacing increased by 0.2%/T 0 in lengthening experiments and decreased by 0.2–0.5%/T 0 in shortening experiments. Remarkably, the force elongation curves obtained from mechanical manipulations on single synthetic rabbit myosin filaments broadly mimicked the results of the X-ray diffraction studies (Dunaway et al. 2002). At low loads the stiffness of these synthetic filaments was low but rose steeply with load so that at loads comparable to isometric tension the filaments had extended by ~1.1%. Considering that synthetic myosin filaments may not have exactly the same structure as natural thick filaments, this may echo the 1.5% change in spacing exhibited by thick filaments when relaxed muscle is activated. At higher loads the stiffness became nearly constant. It therefore seems a possibility that the initial 1.5% elongation of the thick filament on activation is tension-induced rather than a specific effect of activation itself such as a changing interaction of the myosin heads with C-protein.
Since the filaments and crossbridges both contribute to half-sarcomere compliance, which is a relatively well-characterised quantity, the presence of significant filament compliance indicated that crossbridge stiffness was higher than had been thought. It was concluded that the crossbridge compliance was only about half the value previously thought and that crossbridges and filaments contributed roughly equally to the half-sarcomere compliance in an isometric contraction at maximal activation. Huxley and Tideswell (1996) conceded this and considered that the value of crossbridge stiffness should be raised from the earlier estimate of 0.25 pN/nm to ~2 pN/nm. (However, the lack of dependence of half-sarcomere compliance on sarcomere length in the experiments of Ford et al. (1981) has not to our knowledge been fully explained.) It should be noted that segments of filaments between myosin crowns are actually much stiffer than crossbridges; it is the long length of the filaments that causes their extension under load to be comparable to that of the crossbridges.
The presence of filament compliance implied that in isometrically contracting muscle the attached heads would have an average strain of only 2 nm, only a small fraction of what is commonly thought of as the total swing of the lever arm (~10 nm). That has been interpreted to mean that in an isometric contraction the heads are near the start of the working stroke, with the lever arm angles distributed over a relatively small range of angles (Huxley et al. 2006a, b; Decostre et al. 2005). However, this strain is only an average and it is not necessary to assume that all the attached heads are in the same or similar conformational states. For example, an average strain of 2 nm could arise in a low-cooperativity mechanism if 1/5th of the heads were in the post-tensing state with a strain of 10 nm, while 4/5ths of the attached heads were in the pre-tensing state with a low strain.
An important question is whether the equilibrium constant of the tension-generating step and the forward or reverse rate constants are affected by the compliance of the filaments. When a myosin head executes the tension-generating step, formally it must extend not only its own compliant element but also the filament backbones. The extensions of the crossbridge compliant element and of the filament backbones will be proportional to their relative compliances. If the number of attached heads is low, for example in muscle soon after activation, the head will stretch its own compliant element and also the thick filament and thin filament backbones to which it is attached. Because the total compliance of the elements it is working against is therefore high, the equilibrium constant and forward rate constant of the tension-generating step will be relatively high. But in active muscle where the number of attached heads is large, as in isometrically contracting muscle, the thick and thin filaments are cross-linked together by the attached heads into a three-dimensional network extending throughout the cross-section of the sarcomere. This means that the filament stiffness that a single head has to work against is very high compared with that of the compliant element of that head. Consequently the extension of the filaments by the execution of the tension-generating step by a single head is small, and the equilibrium constant and forward rate constant of the tension-generating step will be comparatively low and determined only by the crossbridge compliance. All this implies that modelling of the crossbridge cycle to simulate the activation process in muscle would be complex.
The presence of filament compliance also implies that as force is developed causing filaments to extend, the thick and thin filaments will slide locally with respect to one another even when the sarcomere length is held constant i.e. globally isometrically contracting muscle is not locally isometric (Mijailovich et al. 1996).
Concerted mechanism
The Lombardi group have recently reported that the crossbridge stiffness in the anterior tibialis muscle of the common frog Rana temporaria is as high as 3.3 pN/nm (Decostre et al. 2005; Piazzesi et al. 2007). If the crossbridges were indeed as stiff as this, they might not be able to execute the tension-generating step independently of one another and of filament sliding. During filament sliding, heads attach at different times so will start their tension-generating step at different times but with this high crossbridge stiffness their lever arms would have to swing at similar rates matching the distance moved by the filaments. This has led to the suggestion that the swing of the lever arm occurs in many small steps, possibly a continuum (Huxley 1995; Piazzesi et al. 2003; Decostre et al. 2005; Huxley et al. 2006a, b). Because it has been customary to regard the lever arm swing as synonymous with tension generation, this was interpreted to mean that crossbridge tension generation also occurred in multiple steps (Decostre et al. 2005). We term this a high-cooperativity or concerted mechanism.Footnote 2 For isometrically contracting muscle this mechanism would require all the attached heads to be in similar states partway through their working stroke. In the special case of a rapid length release applied to isometrically contracting muscle the heads originally attached could behave nearly synchronously. The controversy of whether muscle operates in a low-cooperativity or concerted mechanism was summarised by Decostre et al. (2005): “our conclusion that the working stroke in the myosin heads is made by multiple state transitions that progress by different amounts depending on the mechanical conditions challenges the view from crystallographic models of a switch-like conformational change promoted by the release of ATP hydrolysis products”. This controversy largely arises because of uncertainty in the value of the stiffness of myosin heads.
Theoretical aspects
Implications of the value of the crossbridge stiffness
The stiffness of the crossbridges is of critical importance in determining the rate constant of tension generation and therefore defining the number of tension-generating steps that might participate in the crossbridge cycle. In the environment of muscle, the free energy of hydrolysis of ATP is ~83 zJ/molecule (Smith et al. 2005, Barclay et al. 2010). Assuming a maximum thermodynamic efficiency of muscle of ~40%, ~33 zJ might be available to do work in the tension-generating step(s) (Barclay et al. 2010). If a tension-generating step extends a compliant element with stiffness κ pN/nm from zero strain to a strain l nm equal to the stroke distance, the work done is \( \frac{1}{2}\kappa l^{2} \) zJ. A stroke distance of 10 nm would constrain the value of κ such that \( \frac{1}{2}\kappa 10^{2} < 33 \) or κ < 0.66 pN/nm. If this increase were achieved in two tension-generating steps of 5 nm (compare Capitanio et al. 2006; Nyitrai and Geeves 2004), each being associated with a fall of 16 zJ of free energy, then \( \frac{1}{2}\kappa 5^{2} < 16 \) or κ < 1.3 pN/nm. However, it is still possible for one-step or two-step mechanisms to operate with a higher stiffness if (a) the total change of strain were less than 10 nm and/or (b) if the tension generation occurred only when the starting strain was negative (Duke 1999). For example, if for a single step mechanism the starting strain were -3 nm and the final strain were 7 nm, the work done would be \( \frac{1}{2}\kappa 7^{2} - \frac{1}{2}\kappa ( - 3)^{2} = 20\kappa \) requiring κ < 1.6 pN/nm. From consideration of the maximum thermodynamic efficiency in frog muscle, Barclay (1998) suggested that the crossbridge stiffness would be 1–2 pN/nm.
All this indicates that the value of the crossbridge stiffness is a critical parameter. If the crossbridge stiffness were indeed higher than 3 pN/nm it would be difficult to see how the crossbridge cycle could operate with only one or two tension-generating steps and would suggest a multiple-step mechanism of force generation. For similar reasons it would be difficult to understand if in two species the stroke distances were similar but the crossbridge stiffness were radically different. So it becomes important to assess whether the reported large differences between crossbridge stiffness in frog muscle (Decostre et al. 2005; Piazzesi et al. 2007) and rabbit (Linari et al. 2007) are real.
Contributions of crossbridges and filaments to half-sarcomere compliance
The compliant elements in a sarcomere, the Z-disc, the thin filaments, the thick filaments and the crossbridges are not in series but in a more complex series and parallel arrangement (Linari et al. 1998). Ford et al. (1981) derived for this system the relative contributions to the half-sarcomere compliance of the Z-disc, thin filaments, thick filaments and crossbridges, treating the latter as if they had a continuous axial distribution through the region of filament overlap and contributing a shear force between the thick and thin filaments. The half-sarcomere compliance for the entire cross-sectional area of the fibre is given by
where c z is the compliance of the Z-disc, c A and c M the compliances per unit length of the array of thin and half-thick filaments across the fibre. l A is the length of the thin filament if it does not overlap the bare zone; if it does overlap the bare zone, l A needs to be taken as the distance from the Z-disc to the edge of the bare zone (Linari et al. 1998). l M is the length of the half-thick filament, ζ the length of the crossbridge-bearing region overlapped by thin filaments, and k c is the stiffness of attached crossbridges across the fibre per unit length. Assuming that the stiffness of a myosin molecule with both heads attached is twice that with one head attached,Footnote 3 the crossbridge contribution in this expression can be usefully restated in terms of the stiffness κ of an individual myosin head, and the fraction o of the heads in the region of filament overlap that are attached to thin filaments, so that the expression for the half-sarcomere compliance becomes
where ζ 0 is the total length of the crossbridge-bearing region of the half-thick filament and ζ/ζ 0 is therefore the fraction of that region which is overlapped by thin filaments. N is the number of thick filaments in a cross-section through the fibre. The number of myosin heads in a half-thick filament, 294, is the product of the number of myosin crowns (49) and the number of myosin heads in each crown (6). N and ζ/ζ 0 are known from the fibre geometry so if the contributions of thin and thick filaments to half-sarcomere compliance can be determined (for example by X-ray fibre diffraction), the value of the product oκ can be evaluated. The problem then becomes how to determine κ and o from the product oκ. In rigor essentially all the overlapped heads are attached i.e. o = 1. Hence if the contribution of filament compliance and the half-sarcomere compliance for the rigor state is known, it is straightforward to obtain the stiffness of the rigor myosin head.
The main approach for obtaining the stiffness of the myosin head in isometrically contracting muscle is to compare the half-sarcomere compliance in rigor and in the active state under investigation (e.g. isometric contraction). The assumption can be made that the myosin head compliance is the same in rigor as in active muscle. Although the lattice dimensions may alter on rigor development, as long as the half-sarcomere compliances are expressed for the entire cross-section of the fibre (rather than for unit area), N is unchanged. Assuming that the thin and thick filament compliances remain unaltered, the difference between the half-sarcomere compliances in the active and rigor states is thus
and hence κ and o can be determined. The main problem is that the crossbridge contribution to half-sarcomere compliance in rigor is only half or less of that in isometric contraction so that the errors in its determination are particularly large.
Equations 1 and 2 can be used for the compliance of one half of a thick filament and two thin filaments in a half-sarcomere provided c A and c M are now taken to be the compliance per unit length of two thin filaments and a half-thick filament respectively. A similar result for the contributions to half-sarcomere compliance by thick and thin filaments and by crossbridges is obtained if the crossbridges are taken to occur at discrete axial positions at which tension is developed provided the number of attached heads is high (Forcinito et al. 1997). They concluded, however, that at long sarcomere lengths, where the overlap region and hence the number of attached heads is small, their discrete model would give a markedly higher stiffness than the continuous model. In part this may have arisen because they assumed that crossbridges between a thick and thin filament could be formed only at 43 nm, rather than 14.3 nm, axial intervals. In our own modelling (Offer and Ranatunga, in preparation) we found that with either continuous or discrete models, after a length step the change in strain, and therefore in tension, at different myosin crowns is not the same; the change in strain is smallest at the centre of the region of overlap.
An alternative approach is to determine the half-sarcomere compliance when the number of attached heads is altered, for example by changing the Ca2+ concentration in skinned fibres (Linari et al. 2007) or by changing the shortening velocity (Piazzesi et al. 2007). The contribution of filaments to half-sarcomere compliance is unaltered, but as more heads attach, the tension rises and the half-sarcomere compliance falls. From Eq. 2 the relation between the half-sarcomere strain (y 0), the isometric tension and the fraction of heads attached is given by
In general, isometric tension will not be simply related to the fraction of attached heads. In the extreme case, for example, where isometric tension is increased by raising the temperature, the fraction of heads attached does not increase and the half-sarcomere compliance is unchanged by temperature (Piazzesi et al. 2003). However, for especially favourable cases where the isometric tension is proportional to the fraction of heads attached, a plot of y 0 against tension would be linear; the slope would give the contribution of filaments to the half-sarcomere compliance and the intercept on the y 0 axis would give the strain in the attached heads.
If T 0 is the tension borne by the fibre, and the sarcomere is sufficiently long that the thin filaments do not overlap the bare zone, the tension in the array of thin filaments is zero at the filament tips, then rises linearly to T 0 at the end of the A-band, and is then constant up to the Z-disc. If however the thin filaments do overlap the bare zone, the tension in the array of thin filaments is zero right up to the region of filament overlap, before rising linearly to T 0 at the end of the A-band. In either case the extension of the thin filament array in the region of overlap is c A ζT 0/2 and its extension in the half-I band is c A (l A − ζ)T 0. So the total extension of the thin filament array is c A (l A − ζ/2)T 0. Hence p, the fractional extension of the thin filament array per T 0 borne by the fibre is \( c_{A} \left( {1 - {\frac{\zeta }{{2l_{A} }}}} \right) \). Thus if p is determined by X-ray fibre diffraction, the contribution of the thin filament array to half-sarcomere compliance (in units of % extension/T 0) is given by \( p\left( {l_{A} - {\frac{2\zeta }{3}}} \right)/\left( {1 - {\frac{\zeta }{{2l_{A} }}}} \right) \). With a half-width of the Z-disc of 25 nm (Page and Huxley 1976) and a half-width of the bare zone of 75 nm (Craig and Offer 1976), l A for s = 2.1 μm is 950 nm while ζ = 700 nm. With these values, the contribution of the thin filament array to half-sarcomere compliance is 765p nm/T 0.
The tension in the array of half-thick filaments is constant at T 0 from the M-line to the start of the region of filament overlap and then falls linearly to zero at the thick filament tips. If we assume that the thick filament is uniformly compliant throughout its length, the extension of the half-thick filament array from the M-line to the start of the region of filament overlap is c M (l M − ζ)T 0 and its extension in the overlap region is c M ζT 0/2. So the total extension of the array of half-thick filaments is \( c_{M} \left( {l_{M} - \zeta /2} \right)T_{0} \) and the fractional extension of the entire half-thick filament array per T 0 borne by the fibre is \(c_{M} \left({1 - {\frac{\zeta}{{2l_{M}}}}} \right) . \) However, while X-ray fibre diffraction reports on the spacing of the actin subunits throughout the thin filament, it reports on the spacing of the myosin only in the crossbridge-bearing region of the thick filament. At a sarcomere length of 2.1 μm all the crossbridge-bearing region is overlapped by actin. If the half-width of the bare zone is b/2, the length of the crossbridge-bearing region is (l M − b/2). The tension in this region declines linearly from T 0 to zero. The extension of the crossbridge-bearing region is thus \( {\text{c}}_{\text{M}} \left({l_{M} - b/2} \right)T_{0}/2 . \) and hence q, the fractional extension of this region per T 0 borne by the fibre is simply \( {\frac{{c_{\text{M}} }}{2}} \). Hence if q is determined by X-ray fibre diffraction, the contribution of the array of half-thick filaments to half-sarcomere compliance is given by \( 2q\left( {l_{M} - {\frac{2\zeta }{3}}} \right) \). Linari et al. (1998) took l M to be 800 nm and ζ to be 700 nm at s = 2.1 μm. With these values, the contribution of the array of half-thick filaments to half-sarcomere compliance is 667q nm/T 0. A slightly more accurate estimate (786 nm) of l M can be obtained by adding to the half-width of the bare zone, 49 intervals of the myosin spacing of 14.5 nm (Craig and Offer 1976). With this and ζ = 710.5 nm, the contribution of the array of half-thick filaments to half-sarcomere compliance would instead be 625q nm/T 0. We shall refer to these as our preferred values.
Experimental estimates of filament and crossbridge compliance
Frog muscle
We first discuss the results of newer studies of compliance on the anterior tibialis muscle of two frog species, the common frog, Rana temporaria, and the edible frog, Rana esculenta, before comparing these with mammalian muscle. The reason for discussing these two frog species separately is because compliances are often expressed as extensions elicited by an increase of tension equal to the isometric tension (T 0). The isometric tension at 4°C for Rana esculenta is only about two-thirds that for Rana temporaria (Linari et al. 1998); the isometric tension for Rana esculenta was reported as 144 kPa at 2°C or 172 kPa at 5°C by Decostre et al. (2005); by intrapolation this would give an isometric tension of 163 kPa at 4°C. The isometric tension for Rana temporaria was reported to be 230 kPa at 4°C (Reconditi et al. 2004). Fusi et al. (2010) point out that the isometric tension varies not only between these two species but also between batches of frogs. They give a range of 250–300 kPa for Rana temporaria at 4°C and 130–180 kPa for Rana esculenta at 4°C. Although both species have a wide distribution from Western Europe to Japan, Rana temporaria has the more northerly distribution (Douglas 1948). Correspondingly Rana esculenta is more tolerant to heat but less to cold than other Anura. Thus if, as is usually the case, compliances are expressed not as absolute quantities but as the extension per unit isometric tension, compliances for Rana esculenta need to be multiplied by a factor of ~1.8 to compare them with Rana temporaria. It is therefore necessary to specify both temperature and species when compliances are expressed as extensions/T 0.
Rana temporaria
By subjecting active Rana temporaria anterior tibialis muscle at 3–4°C to rapid (3.1 kHz) small-amplitude sinusoidal oscillations, Dobbie et al. (1998) determined the half-sarcomere compliance to be 5.1 ± 0.3 nm/T 0. This is appreciably larger than the y 0 value of ~4 nm/T 0 found from single rapid length releases by Ford et al. (1977) and it could be questioned whether their assumption is correct that no attachment or detachment of heads occurs in each oscillation. The net amount of detachment or attachment may be small but not zero in the first few oscillations and changes in each oscillation would be additive until a new steady state is reached with a different fraction of heads attached from that in an isometric contraction. Bagni et al. (2001) found that the half-sarcomere compliance decreases substantially with oscillation frequency and it may not have reached a constant value at the highest frequency they used of 3.5 kHz where the half-saromere compliance was 3.98 nm/T 0.
Dobbie et al. (1998) followed the changes in spacing of the M3 myosin reflection and the 5.9 nm actin layer line during these oscillations. The average strains in the thick and thin filaments were 0.12 ± 0.01%/T 0 and 0.30 ± 0.13%/T 0 respectively. They concluded that the contributions of thick and thin filaments to half-sarcomere compliance were 0.8 ± 0.07 nm/T 0 and 2.3 ± 1.0 nm/T 0 respectively, from which they deduced that the contribution of the crossbridges to half-sarcomere compliance was 2.0 nm/T 0. However, since the strain in the thin filament had a sizeable error, Dobbie et al. considered that earlier values for actin filament compliance of 0.23 ± 0.01%/T 0 from the spacing change in the 2.7 nm actin reflection (Huxley et al. 1994) or 0.21 ± 0.03%/T 0 from the change in compliance with sarcomere length for Rana esculenta (Linari et al. 1998, see below) were more precise. These would reduce the contribution of actin filaments to half-sarcomere compliance to 1.8 and 1.6 nm/T 0 respectively, and therefore raise the contribution of the crossbridges to half-sarcomere compliance to ~2.6 nm/T 0.
Reconditi et al. (2004) considered measurements of the spacing changes of the M3 unsatisfactory as a measure of the changes in length of the thick filament backbone because the M3 reflection might be expected to have major contributions from attached as well as detached heads. They suggested that, because of their axial disorder, the attached heads would make smaller contributions to the M6 reflection. While this is a reasonable assumption, it remains to be proved. Their M6 data indicated that the myosin filaments were extended on average by 0.26 ± 0.01%/T 0 and so they revised the contribution of the thick filament to half-sarcomere compliance substantially upwards to 1.73 ± 0.07 nm/T 0. (With our preferred values of l M and ζ, the thick filament contribution to half-sarcomere compliance would be slightly lower, 1.63 nm ± 0.06 nm/T 0). The thin filament compliance was taken to be 0.26%/T 0 (with a standard error of at least 0.01%/T 0) which gives a contribution of the thin filaments to the half-sarcomere compliance of 1.99 ± 0.08 nm/T 0. Subtracting the contributions made by the actin and myosin filaments from the half-sarcomere compliance, Reconditi et al. (2004) concluded that the crossbridges in a half-sarcomere contributed a complianceFootnote 4 of only 1.38 ± 0.32 nm/T 0. (With our preferred values of l M and ζ, this would be 1.48 ± 0.31 nm/T 0). The standard error is substantial as it has contributions from the errors in the half-sarcomere compliance, in the thin filament compliance and in the thick filament compliance. Note that it does not include any systematic errors (e.g. by assuming M6 is contributed only by the thick filament backbone). Taking T 0 for this muscle at 2°C as 230 kPa (Reconditi et al. 2004), the crossbridge contribution to half-sarcomere compliance is 1.38/230 = 0.0060 ± 0.0014 nm/kPa i.e. the crossbridges in a half-sarcomere have a collective stiffness of 167 ± 40 kPa/nm. (With our preferred values of l M and ζ (see above), this value would fall to 156 ± 30 kPa/nm.)
Although the crossbridge compliance is commonly expressed as the average strain of attached heads in an isometric contraction, for modelling purposes it is desirable to know the stiffness per head. To convert the collective stiffness to the stiffness per head, we need the density of myosin heads. The total number of myosin heads in a half-sarcomere per μm2 cross-sectional area of a frog fibre with a sarcomere length of 2.1 μm is 1.53 × 105 (“Appendix 1” section). If 50% of these heads are attached in isometrically contracting muscle, the stiffness per attached head would be 167/(0.5 × 1.53 × 105) = 2.18 ± 0.52 pN/nm. If 40% of the heads were attached, the stiffness per attached head would be 2.73 ± 0.65 pN/nm. Only if the fraction of heads attached in an isometric contraction were as low as 30% would the stiffness rise to 3.64 ± 0.87 pN/nm, close to the value of 3.3 pN/nm proposed by Piazzesi et al. (2007). (With our preferred values of l M and ζ, these values become 2.04 ± 0.39 pN/nm for 50% attached, 2.55 ± 0.49 pN/nm for 40% attached, or 3.40 ± 0.65 pN/nm for 30% attached).
Modelling with the equations either for the continuous or the discontinuous distributions, a stiffness/head of 2.0 pN/nm with 50% heads attached in an isometric contraction, with a thick filament compliance of 10.6 × 10−5 pN−1 and compliance of a single thin filament of 16.7 × 10−5 pN−1 gives for a 5.1 nm/hs release a tension fall of 1.6 pN/head, a decrease in thick filament length of 0.25% and a decrease in thin filament length of 0.25%, all close to observation. Hence, we conclude that there is no firm evidence for thinking that the stiffness of myosin heads in Rana temporaria is appreciably greater than 2.0 pN/nm.
Piazzesi et al. (2007) sought to obtain the myosin head compliance in this muscle by a different method. They determined with 4 kHz length oscillations the half-sarcomere compliance of the anterior tibialis muscle of Rana temporaria shortening at a wide range of loads. The half-sarcomere compliance was 4.9 nm/T 0 during isometric contraction but this doubled at a load of 0.15 T 0 because fewer myosin heads were attached. At loads >0.5 T 0 the half-sarcomere strain increased roughly linearly with load and the slope of this part of the plot was 3.2 nm/T 0. However, because of the curvature of the plot, there is an appreciable error of at least 0.5 nm/T 0. By taking the number of heads attached to be proportional to load, they considered this slope was a measure of the contribution of filaments to half-sarcomere compliance. The strain in the attached myosin heads was roughly constant at ~1.7 nm at these high loads. They calculated that in an isometric contraction the bare zone of each thick filament carried a tension of 480 pN, making the tension per head averaged over all heads (attached and detached) 480/294 = 1.63 pN. They determined the half-sarcomere compliance in the rigor state to be 3.7 ± 0.1 nm/T 0. Subtraction of the filament compliance gives the contribution of the crossbridges to the half-sarcomere compliance when all the heads are attached of 0.5 nm/T 0. However the error in this contribution is of similar magnitude to the contribution. So although they concluded that the compliance of a myosin head is 0.5/1.63 = 0.31 nm/pN corresponding to a stiffness of ~3 pN/nm, we think that no firm conclusions can be made. Using this value of head compliance, the strain of 1.7 nm in the attached heads in an isometric contraction would give a tension in attached heads of 1.7/0.31 = 5.5 pN. They deduced that the fraction of heads that are attached in an isometric contraction is 1.63/5.5 = 0.30. Again the errors in this determination seem too large to draw definite conclusions.
Rana esculenta
Several studies of filament and crossbridge compliance have been made with the anterior tibialis muscle of Rana esculenta. Instead of using X-ray fibre diffraction to measure thin filament compliance, Linari et al. (1998) estimated this from the dependence of half-sarcomere compliance on sarcomere length. Only a small range, 2.00–2.15 μm, of sarcomere lengths was examined in order that the crossbridges remained completely overlapped so that changes in the half-sarcomere compliance would be due only to the varying length of the thin filament in the I-band. They obtained a value for the contribution of the thin filaments to half-sarcomere compliance of 1.12 ± 0.17 nm/T 0. From previous measurements of the compliance of the thick filaments measured using the M3 X-ray reflection, they estimated their contribution to half-sarcomere compliance to be 0.44 nm/T 0. The intercepts of the instantaneous tension-length plot on the length axis for length steps on this muscle at 4°C, gave the half-sarcomere compliance in an isometric contraction as 3.88 nm ± 0.05 nm/T 0 and 2.56 ± 0.08 nm/T 0 for rigor. Subtracting the filament compliances from the half-sarcomere compliance gave the contribution from crossbridges of 2.30 ± 0.43 nm/T 0 for an isometric contraction and 1.01 ± 0.23 nm/T 0 for rigor. The fraction of heads attached in an isometric contraction was concluded to be the ratio of these, 0.43 ± 0.05.
In good agreement with this length step data, Decostre et al. (2005) found a half-sarcomere compliance for isometrically contacting muscle obtained from the elastic response to load steps of 3.49 ± 0.24 nm/T 0 at 2°C and 4.01 ± 0.18 nm/T 0 at 5°C; in their supporting text they intrapolate these values to 3.88 nm/T 0 at 4°C (presumably with a standard error of ~0.2 nm/T 0). From this value of the half-sarcomere compliance, Decostre et al. (2005 supporting text) subtracted the contribution made by actin filaments to the half-sarcomere compliance (Linari et al. 1998) and the contribution made by myosin filaments of 1.14 ± 0.07 nm/T 0 (estimated from the value obtained by Reconditi et al. 2004 for Rana temporaria by scaling for the lower isometric tension in Rana esculenta). This gives the average strain in the myosin heads in Rana esculenta of 1.62 ± 0.27 nm/T 0 at 4°C (or 1.69 ± 0.27 nm/T 0 if we use our preferred values for l M and ζ). It is important to note that this strain is higher than in Rana temporaria despite the isometric tension being substantially lower. Taking T 0 = 163 kPa, the crossbridge contribution to half-sarcomere compliance is 1.62/163 nm/kPa corresponding to a collective stiffness of 101 kPa/nm. If we use the figure given above of 1.53 × 105 for the number of heads per half-sarcomere in frog muscle per μm2 cross-sectional area and assume 50% of the heads are attached, the stiffness per attached head would be only 1.32 ± 0.22 pN/nm. If only 30% of the heads were attached, the stiffness per attached head would still be only 2.19 ± 0.37 pN/nm. And with our preferred values of l M and ζ, the stiffness per attached head would fall to 1.26 ± 0.22 pN/nm (if 50% heads attached) or 2.10 ± 0.37 pN/nm (if only 30% heads are attached).
Decostre et al. (2005) give much more prominence to their conclusion from a quite different, thermodynamic approach that the myosin heads in this muscle from Rana esculenta have a very much higher stiffness of 3.1 pN/nm and do not point out this internal inconsistency. In this approach they determined the standard Footnote 5 free energy change of the tension-generating step at different temperatures from the dependence of tension on temperature. They interpreted this data in terms of a model in which tension generation occurs in multiple steps which are assumed to be in mechano-chemical equilibrium. Strains were obtained at each temperature by subtracting from y 0 the contributions of filaments to compliance. They proposed, as later did Linari et al. (2007), that the stiffness of a head κ is given by
where \(\Updelta G_{{t_{2} - t_{1}}} . \) is the increase in standard (see footnote 5) free energy fall for the tension-generating step with rise of temperature from t 1 to t 2, and \( s_{{t_{1} }} \) and \( s_{{t_{2} }} \) are the average strains per attached head at these temperatures. From this they proposed that the myosin head stiffness was 3.10 ± 0.26 pN/nm. However, we have several concerns about their approach. Firstly, it is unclear how far it is valid to treat the tension-generating step as being in equilibrium. In our models of the crossbridge cycle which simulate the mechanical properties of frog muscle, we find that in an isometric contraction the tension-generating step is nearly in equilibrium only for heads which are positively strained or have only a small negative strain. Secondly, the standard free energy of the tension-generating step refers to the change in free energy when the occupancies of the pre-tensing and post-tensing states are equal. Yet the work terms being subtracted in Eq. 4b are the strain energies in the crossbridges at equilibrium at each of the two temperatures. Thirdly, although part of the standard free energy fall at one temperature is indeed associated with the work done in straining the crossbridges, the rest is associated with the change of conformational state accompanying the tension-generating step (Huxley and Simmons 1971a, b; Eisenberg and Hill 1978). That this must be so is apparent if we consider the standard free energy fall in solution where the work term is necessarily zero. In “Appendix 1” we derive for a simple model with a single tension-generating step the value of \( \Updelta G_{{t_{2} - t_{1} }} \); for this purpose only we follow Decostre et al. (2005) in assuming this step is in equilibrium. The expression of the value for \( \Updelta G_{{t_{2} - t_{1} }} \) we obtain does not include κ, and therefore, in our view, gives no information on the crossbridge stiffness. Therefore, it seems that the valid estimate of the crossbridge stiffness in Rana esculenta is the much lower value obtained from the data of Decostre et al. of 1.32 ± 0.22 pN/nm (if 50% of the heads are attached).
Rabbit muscle
Since most biochemical, structural and enzymatic studies have been made on mammalian or avian muscle, it is informative to compare the stiffness data above on frog crossbridges and filaments with those on rabbit. By using skinned fibres from rabbit psoas muscle, Linari et al. (2007) could alter active tension by changing the Ca2+ concentration. The half-sarcomere compliance measured by rapid length changes was 0.0430 ± 0.0008 nm/kPa in an isometric contraction at saturating Ca2+, or 0.0282 ± 0.0011 nm/kPa in rigor and did not change with temperature. Because the dependence of half-sarcomere strain on the isometric tension at different Ca2+ concentrations was linear, they concluded that the Ca2+ concentration was altering the number of attached heads, but not the force per attached head. The slope of this relation thus gave the contribution of filaments to half-sarcomere compliance as 0.0210 ± 0.0033 nm/kPa. The intercept on the strain axis, 4.0 nm, is the average strain in the attached myosin heads. Subtraction of the filament complianceFootnote 6 gives the contribution of crossbridges to half-sarcomere compliance as 0.0220 ± 0.0008 nm/kPa at saturating Ca2+ or 0.0072 ± 0.0011 nm/kPa for rigor. The ratio of these, 0.33 ± 0.05 was taken6 to be the fraction of heads attached in isometric contraction. From the filament lattice dimensions, they deduced that the stiffness of individual rabbit myosin heads in rigor was 1.21 ± 0.18 pN/nm. They estimated the stiffness of heads in active muscle using the same thermodynamic approach (Decostre et al. 2005) that we have criticised above, so we think their value of the stiffness of the active head is not justified. Taking the isometric tension at saturating Ca2+ to be 168 ± 15 kPa, if the stiffness of the active head were the same as the rigor head, 30% of the heads would need to be attached. In response to skinning, the cross-sectional area of the fibre increases; in the results above, force was normalised to the cross-sectional areas of the skinned fibre in relaxing solution. If 5–10% dextran were added to reduce the lateral filament spacing to the value before skinning (Maughan and Godt 1979), the crossbridge stiffness in active muscle increased to 1.7 pN/nm; the filament compliance was unaffected. The structural cause of the sensitivity of crossbridge stiffness to interfilament spacing is unknown and deserves further attention as it may give important insights.
A recent optical trap study of the myosin head stiffness has been made on single molecules of rabbit subfragment-1 (S1) interacting with an actin filament at a low (2 μM) ATP concentration (Lewalle et al. 2008). The actin filament is stretched between two latex beads each held in an optical trap. The problem encountered in such studies is that the links between the actin filament and each bead have substantial compliance which is non-Hookean and in general not the same for both beads. Leewalle et al. overcame this problem by applying a large-amplitude (0.2–0.5 μm) triangular wave to both beads during which interaction of S1 and actin can occur. When the S1 binds actin, the stiffness of the myosin heads slows the motion of the actin filament and hence the beads. From the ratio of velocities of the two beads for the bound and unbound states and the combined link stiffness, the stiffness of both actin-bead links and the stiffness of the myosin head can be obtained. The average value for the head stiffness was 1.7 ± 0.3 pN/nm, very similar to the value above found in the rabbit fibre studies. This value is higher than found in previous optical trap studies (Mehta et al. 1997; Veigel et al. 1998) which used heavy meromyosin, perhaps because of the problems caused by bead compliance.
Effect of temperature on stiffness
Temperature-jump experiments have shown that the tension increase caused by an increase in temperature is not associated with increased muscle fibre stiffness (Goldman et al. 1987; Bershitsky and Tsaturyan 1992). Piazzesi et al. (2003) made a detailed investigation of the effect of temperature on stiffness in frog (Rana esculenta) muscle. They found that if the absolute values of T 1 (in kPa) were plotted against length step, the slopes at 2°C and 10°C were identical indicating that the crossbridge stiffness is not temperature dependent. Similarly, Decostre et al. (2005) found that plots for different temperatures of the amount of sliding during the elastic response to load steps against isometric tension were parallel, again indicating that crossbridge stiffness was not temperature dependent. Similar data were reported previously by Galler and Hilber (1998) from mammalian muscle fibres over a wider range of temperatures (6–34°C). These experiments indicate that increasing temperature increases the average force per attached head by altering the equilibrium between heads from those exerting low force to those exerting high force, without altering the number of heads attached (Piazzesi et al. 2003; Decostre et al. 2005). That the number of attached heads is unaltered on raising the temperature was confirmed from rupture force measurement in frog fibres (Colombini et al. 2008).
In single molecule experiments, the force a myosin head develops after attachment to an actin filament was found to be similar at different temperatures (Kawai et al. 2006). This finding is consistent with the notion above that in muscle the increase of average force as temperature is increased is due to a shift in the equilibrium between low-force pre-tensing head and high-force post-tensing heads rather than due to increase of force developed by each post-tensing head.
Location of crossbridge compliance
In general all structures, biological and non-biological, have some compliance so the issue is which structure (or structures) contributes most to crossbridge compliance, subfragment-2, the head–tail junction, the lever arm, the converter or the actin-myosin interface. For ease of drawing diagrams of tension generation in the crossbridge cycle, crossbridge compliance is often depicted as being in the subfragment-2 region of the myosin tail. If that were the case, the stiffness of a myosin molecule would be the same whether one or both heads were attached. The optical trap experiments discussed above showing that rabbit S1 has a similar stiffness to whole rabbit myosin molecules indicate that most of the compliance resides in the myosin head rather than the tail. Unfortunately the instability of frog myosin has so far deterred similar experimentation.
Dobbie et al. (1998) concluded from their study of the changes of the intensity of the M3 X-ray reflection of oscillating frog muscle that the lever arm was bending as the length changed and concluded that crossbridge compliance resided in the lever arm. However, with our colleagues John Squire and Carlo Knupp we have recently argued that the changes in the intensity of this reflection principally arise from the changes in the axial separation of attached and detached motor domains, and are not sensitive to motions of the lever arm (Knupp et al. 2009).
Brenner and his co-workers have provided strong evidence that much of the crossbridge compliance is located in the converter subdomain of the myosin head or at the junction of the converter subdomain with the lever arm. They examined the mechanical properties of human soleus fibres from patients with familial hypertrophic cardiomyopathy caused by mutations in the converter of β-myosin, the isoform expressed in both cardiac and slow skeletal myosin (Köhler et al. 2002; Seebohm et al. 2009). Stiffness measurements were made with ramp stretches or releases of varying velocity at 10°C or 20°C. Fibres containing mutant myosins R719W or R723G showed a ~50% increase in both force and stiffness compared with those from healthy controls. Since the mutant isoforms comprised only ~54% or 62% of the total myosin respectively, the tension developed by the mutant heads was more than double that of the wild type. Rigor stiffness increased by a similar factor showing that the increase in stiffness in active muscle was due to an increase in the stiffness of individual crossbridges rather than to an increase in number of attached heads. Brenner and coworkers make the telling point that if the converter were responsible for only a small fraction of the sarcomere compliance, even a mutation that made the converter completely rigid would result only in a small increase in fibre stiffness. The contribution of filament compliance to half-sarcomere compliance (0.025 nm/kPa) was obtained from the slope of the plot of half-sarcomere compliance against tension for a range of Ca2+ concentrations. Using this value together with the half-sarcomere compliance in the rigor state, they calculated that the stiffness of a control rigor head in this muscle is 0.29 pN/nm. A similar stiffness was found for the control active heads. These values are very much lower than that reported for frog and rabbit fast muscles. These low values may in part be due to the value of the density of myosin heads these authors have used for this muscle. The soleus muscle contains a large number of mitochondria, so the fraction of the cross-sectional area of the fibre occupied by myofibrils may be substantially lower than that in the fast frog or rabbit fibres, perhaps only 0.5. So the density of myosin heads may be only 0.74 × 105 myosin heads per half-sarcomere per μm2 cross-sectional area of human soleus fibres. This would increase the value of the stiffness of human soleus myosin heads to ~0.44 pN/nm, although this is still considerably lower than that of frog and rabbit. A contributory cause for the low value for isometrically contracting heads may be the low speed of release (~5 nm/ms), much less than that used by Ford et al. (1977) or Piazzesi et al. (2003). We note that their plots of T 1 against length step are markedly curved, similar to those of Huxley and Simmons (1971a, b) where the duration of the length steps was ~1 ms. Significantly, the y 0 value estimated by Huxley and Simmons (1971a, b) was halved when the duration of the length step was reduced to 0.2 ms (Ford et al. 1977). We therefore suggest that even for small length steps appreciable tension recovery may have occurred during the ramp length steps in the experiments of Seebohm et al. (2009), so that their value of y 0 may have been overestimated.
Houdusse et al. (2000) and Gourinath et al. (2003) noted that in crystal structures of subfragment-1 with ADP and vanadate bound, where the head is in the closed conformation, the angle between the converter and the lever arm varied between species. They called the short region of eight residues (774–781 in the scallop sequence) at the junction in the heavy chain helix between converter and the lever arm the pliant region, speculating that it may be a source of crossbridge compliance. Further analysis suggested that the bend in the heavy chain helix in this region depends on the nature of the contacts with residues in the converter or with the essential light chain (Gourinath et al. 2003). Striking confirmation that this pliant region (or one very close to it) was indeed flexible has been obtained from electron micrographs of myosin V molecules (Burgess et al. 2002). Myosin V molecules in the absence of ATP display substantial variability in the angle the lever arm emerges from the motor domain. In myosin V molecules attached by both heads to actin, the motor domain of the lead head is in the closed (i.e. pre-tensing conformation) but the lever arm, although essentially straight, is bent back towards the trail head by a variable angle. The point of emergence of the lever arm in the lead head is nearer the trail head, whereas in the trail head (considered to be in the post-tensing conformation) it is nearer the front. The axial displacement of this point of emergence as a result of this conformational change was 5 nm in the electron micrographs, 3.6 nm in the crystal structures. All this suggests that much of the compliance of a myosin head lies in the pliant region. It is striking that the two residues which when mutated lead to a large increase in myosin head stiffness lie in the core of the converter but make contact with the pliant region (Köhler et al. 2002; Seebohm et al. 2009).
Fraction of heads attached in an isometric contraction
Estimation of the stiffness of active myosin heads critically depends on the value assumed for the fraction of heads attached in an isometric contraction. As indicated in Eq. 2, for a given value of the contribution made by crossbridge compliance, a high value for crossbridge stiffness will imply a low value for occupancy. One method historically used for estimating this fraction of attached heads was to compare the relative intensities of the X-ray equatorial reflections from relaxed and active muscle (Haselgrove and Huxley 1973; Yu et al. 1985). Although these studies of equatorial intensity changes were crucially important in the development of ideas about crossbridge action, their drawback is that, at the structural resolution they allow, it cannot be decided whether a head is bound, or merely in the vicinity of the thin filament. Another approach using X-ray diffraction has been to measure the increase in actin layer line intensity on activation. Because for the first actin layer line this increase is very small (Huxley et al. 1982), it was suggested that the fraction of myosin heads attached in a stereospecific manner is low, <0.2–0.30 (Huxley and Kress 1985). However, when heads first attach they may do so in a non-stereo-specific manner with axial but not helical order so that only the actin meridional reflections are intensified (Huxley and Kress 1985; Bershitsky et al. 1997). Later, when the heads undergo a tension-generating change from a weakly bound state to a strongly bound state, the attachment becomes stereo-specific and the intensity of the actin layer lines increases (Bershitsky et al. 1997). From the intensification of the first actin layer line of semitendinosus fibres from Rana temporaria in response to a T-jump, they conclude that before the T-jump a fraction 0.27 of the heads are stereospecifically attached, while after the T-jump this increases to 0.46. This implies that the total fraction of heads attached in an isometric contraction is in excess of 0.46. Huxley et al. (2006a) found that the changes in the intensity and interference splitting of the M3 and M6 myosin meridional reflections in response to rapid releases could be explained if both attached and detached heads contributed to these reflections. Satisfactory fits could be obtained with a fraction 0.21 or 0.25 of the heads attached with a relatively narrow axial distribution, the detached heads having a broader distribution. But they commented that models with substantially larger or smaller fractions of attached heads could also be fitted to the data if the dispersion of the detached heads were altered appropriately.
A very different approach to determine the fraction of heads attached is to compare the muscle stiffness in an isometric contraction and rigor. If there were no filament compliance, the fraction of heads attached would simply be the ratio of the half-sarcomere compliance in an isometric contraction to that in rigor. This ratio is ~0.75 in frog muscle (Goldman and Simmons 1977; Piazzesi et al. 2007). If filament compliance is present, the fraction of heads attached would be less than this ratio, so 0.75 is an upper limit. If in an isometric contraction the ratio of the contribution to half-sarcomere compliance of filaments to that of crossbridges were x, the fraction of heads attached required to give the observed ratio of rigor to isometric half-sarcomere compliance would be (0.75–0.25x). So if, as is now supposed, the filaments and crossbridges contribute about equally to half-sarcomere compliance, the fraction of heads attached would be ~0.5. To estimate the fraction of heads attached, the contribution of filament compliance therefore needs to be determined (for example by X-ray diffraction), so that by subtraction from the half-sarcomere compliance, the crossbridge contribution to half-sarcomere compliance can be compared in rigor and isometric contraction. As explained above, Linari et al. (2007) estimated that the fraction of heads attached in rabbit muscle was only 0.33 ± 0.05 (but see footnote “6”). Deciding that the M6 reflection gave a more reliable indication of the thick filament compliance, they revised their estimate of the contribution of the thick filaments compliance upwards by a factor of 2.5 times to 1.1 nm/T 0. This resulted in revised values for the contribution of crossbridges to half-sarcomere compliance in the isometric and rigor states for rabbit muscle of 1.66 nm/T 0 and 0.34 nm/T 0 respectively with standard errors of about 0.2 nm/T 0. Their former estimate for the fraction of heads attached in Rana esculenta in an isometric contraction of 0.43 ± 0.05 (Linari et al. 1998) was therefore revised down to only 0.22. In view of the uncertainties in deciding how the thick filament compliance is best measured and the large errors in determining the crossbridge contribution for rigor muscle, we think this low estimate of the fraction of attached heads should be treated with caution.
We have modelled the crossbridge cycle with either one or two tension-generating steps to simulate the experimental force–velocity relation of frog muscle and its tension response to rapid length steps. Our best models refined by simulated annealing give the fraction of attached heads in an isometric contraction of 0.4–0.5. All this indicates that there is currently little consensus on the fraction of myosin heads that are attached in an isometric contraction, although we think it likely that it lies in the range of 0.3–0.5.
Are filament compliance and crossbridge compliance Hookean?
Edman (2009) has recently claimed that filament compliance is non-Hookean, as also indicated in some previous studies e.g. Higuchi et al. (1995) and Griffiths et al. (2006). Single fibres from the anterior tibialis muscle of Rana temporaria at initial sarcomere lengths of either 2.20 or 2.60 μm were subject to load steps and the half-sarcomere compliance was measured using a 2 kHz length oscillation. The two or three force-clamp levels were identical for the two sarcomere lengths (i.e. the same fractions of the tetanic force at 2.20 μm sarcomere length). The lower stiffness at 2.60 μm compared to 2.20 μm was attributed to the greater length of the non-overlapped portions of the thick and thin filaments, but in part this may be due to a smaller number of attached heads at the longer length. The ratio of the stiffness at 2.60 μm sarcomere length to that at 2.20 μm for loads between 40 and 70% of the tetanic force at optimum length showed little variation with load. Based on this ratio, the compliance of the non-overlapped portions of the thick and thin filaments were calculated, assuming that the overlapped portions of the thick and thin filaments have no compliance. It was concluded that the filament stiffness at full overlap markedly exceeds the crossbridge stiffness and that it increases with increasing tension. Reconditi (2010) has argued that the errors in Edman’s data do not justify the conclusion that the filament compliance is non-Hookean and that his assumption that the filaments in the overlap region were not compliant was unlikely to be correct. Edman (2010), in his response, pointed out that “no concrete evidence has been presented to show that the myofilaments in intact muscle behave as Hookean springs”. In our view, the experimental findings still remain unclear whether or not the filament compliance is Hookean (see the next section). As pointed out recently from modelling the force–velocity relation (Månsson 2010b), small non-linearities in filament compliance could have significant effects on muscle mechanics.
The optical trap study on rabbit S1 interacting with actin showed that it displayed Hookean behaviour over a range of 0–14 pN or up to a strain of ~7 nm (Lewalle et al. 2008). It would be interesting to know whether the compliant element would continue to behave in a Hookean manner if the strain were increased to ~10 nm such as might be encountered in lengthening muscle, or if the heads became negatively strained.
Crossbridge stiffness in lengthening muscle
When isometrically contracting frog or mammalian muscle is stretched at a constant velocity, after a brief transitory phase, the tension reaches a steady level up to twice the isometric tension (Katz 1939; Lombardi and Piazzesi 1990; Linari et al. 2000; Pinniger et al. 2006). At the beginning of the stretch the tension rises at a rate similar to that expected from the stiffness exhibited in rapid length steps (Pinniger et al. 2006). A small inflection can then be detected that we have attributed to a reversal of the tension-generating step. At moderate lengthening velocities the tension then rises smoothly to the steady level but at higher lengthening velocities the tension overshoots to a peak before decreasing to the steady level. Ignoring the non-crossbridge contribution (see Pinniger et al. 2006), the maximum steady tension is reached at a low velocity of sliding and further increase in velocity does not raise the tension further; the muscle is said to “give”. The stiffness during steady lengthening (as measured by superposed rapid small length steps) is 10–25% above the isometric level over a wide range of lengthening velocities (Lombardi and Piazzesi 1990; Linari et al. 2000).
Two interpretations have been made of the force enhancement when muscle is lengthened: an increased strain in the attached heads and/or an increase in the number of attached heads. Before the magnitude of filament compliance was appreciated, it was supposed that the small increase in stiffness on lengthening arose from a correspondingly small (10–20%) increase in the number of attached heads. The much larger force enhancement on lengthening was therefore attributed mainly to the increased strain in the attached heads (Lombardi and Piazzesi 1990). The results were interpreted with a model in which the detachment of heads during lengthening was very sensitive to strain becoming very rapid at high strains ~12 nm. During lengthening, positively strained heads would be expected to be inhibited from executing the tension-generating step causing the crossbridge cycle to be truncated (Lombardi and Piazzesi 1990 Footnote 7; Pinniger et al. 2006). The attached heads would therefore be predominantly in the pre-tensing state and the enhanced tension would arise because pre-tensing heads attach to actin at low strain, get dragged to higher strains as the filaments slide, before they eventually detach. This interpretation explains why although isometric tension is very sensitive to temperature, the lengthening tension is insensitive to temperature, and temperature jumps applied to lengthening muscle do not increase tension (see references in Ranatunga et al. 2007, 2010).
The view that the force enhancement is largely due to enhanced strain has been supported by Cecchi and colleagues using a novel approach to estimate the fraction of heads attached in active muscle (Bagni et al. 2005; Colombini et al. 2007b). They showed that very fast ramp stretches (>16 nm per half-sarcomere at a velocity of 10–30 L0/s,) applied to active frog muscle fibres produced a nearly linear increase of tension up to a peak followed by a fall to a low value in spite of continued stretching, indicating a sudden increase in the compliance of the fibre. They considered that the peak tension reached during stretch (Pc, critical tension or rupture force) represents the tension at which the rate of detachment of heads increases rapidly. For frog fibres on the tetanic tension plateau, the critical tension was 2.4 times the isometric tension occurring at a stretch of ~10–11 nm/half-sarcomere (Lc). They determined the strength of the actomyosin bond in single intact muscle fibers by dynamic force spectroscopy. The actomyosin interaction distance was 1.25 nm, a value similar to that reported for a single actomyosin bond under rigor conditions (Colombini et al. 2007a). Measurements during shortening, tension rise and relaxation, suggested that Pc is a measure of the fraction of attached heads and Lc a measure of their mean extension. With this approach to determine the fraction of heads that are attached, Colombini et al. (2007b) concluded that during active muscle lengthening the increase of crossbridge number accounts for only 15% of the force enhancement, the remaining 85% being due to the increased mean strain of the attached crossbridges, an interpretation largely consistent with the above.
Although Lombardi’s group initially considered that the force enhancement on lengthening was due to greater strain in the attached heads, they later rejected this view after the magnitude of filament compliance became appreciated. Using X-ray fibre diffraction to estimate the fractional contribution of filament compliance to half-sarcomere compliance in the anterior tibialis muscle from Rana temporaria, and assuming that half-sarcomere compliance is Hookean, they concluded that the crossbridge stiffness increased by 77% on lengthening (Linari et al. 2000). The average strain in the attached heads was calculated to be 2.32 nm in an isometric contraction but on lengthening the average strain (2.20 nm) did not increase. They therefore concluded that recruitment of new attached heads played the dominant role in force enhancement.Footnote 8 They hypothesised that in an isometric contraction myosin molecules are attached to actin mostly by one head but on lengthening the second head also attaches.
The increase in stiffness of the half-sarcomere on lengthening is very rapid. Only 3 ms after the beginning of a ramp stretch the stiffness increased by 22% (Piazzesi et al. 1997; Brunello et al. 2007). Moreover the T 1-length plot for step stretches of very short duration (0.10 ms) applied to isometrically contracting muscle indicated that the half-sarcomere stiffness increases with stretch (Lombardi and Piazzesi 1990; Linari et al. 2000; Brunello et al. 2007; Fusi et al. 2010). The half-sarcomere stiffness and the crossbridge stiffness increased with the size of the stretch reaching plateaus of 1.3 and 1.8 times the isometric values. So the process responsible for the increase in the stiffness of the half-sarcomere and crossbridge stiffness is very fast, much occurring during the stretch itself; a further increase in stiffness in phase 2 was attributed to the further increase in strain of attached heads as the filaments shrink in response to the tension fall. They suggest this process is the rapid (7.5 × 104 s−1) attachment of the second myosin head, two or more orders of magnitude faster than that of the first head. Although Fusi et al. (2010) describe this attachment as strong, it cannot resemble the attachment of AM.ADP heads in having a similar lifetime, otherwise the second head would be stretched to very high strains, contrary to their hypothesis. While the hypothesis that attachment of the second head is responsible for the increases in stiffness and tension on lengthening is intriguing, not least because it would give a role for the dimeric structure of muscle myosin, it leaves many questions unanswered. Any explanation must take into account that during lengthening individual attached heads necessarily become more strained as the filaments slide until they detach. Indeed they find that at the end of the step stretch the force per attached head rises with the stretch size reaching twice the isometric value but then declines to the isometric value by the end of phase 2. But it is unclear what mechanism underlies this decline. Linari et al. (2000) suggest that the rate of detachment of heads becomes fast at strains only slightly greater than those in an isometric contraction, but it is not obvious what mechanism would enable the average strain to remain constant over a range of lengthening velocities. It was suggested that the first head acts as a strain sensor, an increased strain in this first head signalling the second head to attach, but if the average strain is not increased on lengthening, it is not clear how that process would work. And how would the second head come to exert tension? Since Brunello et al. (2007) suggest that the second head is displaced one actin subunit M-wards with respect to the first head, the strain in the second head on attachment would be ~5 nm less than in the first head, presumably therefore exerting negative, not positive, tension. In our view, since the T 1-length plot deviates from linearity at high stretches, it seems simpler to favour the alternative explanation they raise but reject, that the enhancement of stiffness during lengthening arises because the crossbridge compliance and/or filament compliance is not perfectly Hookean and that the half-sarcomere stiffness increases by ~25% at high strains. Fusi et al. (2010) have argued against this possibility, pointing out that rigor muscle is unlike active muscle in demonstrating Hookean behaviour up to a tension 2.5 times the isometric tension. But experimental stretches were limited to 3 nm/hs, and it is quite conceivable that at higher strains, (e.g. 5–10 nm/hs) that would be experienced if tension enhancement were due to greater strain in the attached heads, there may be a departure from Hookean behaviour.
Relationship between stiffness and tension
On activation of muscle there is a non-linear relation between the rising tension and rising stiffness, tension lagging behind stiffness (Cecchi et al. 1982, 1986; Ford et al. 1986; Bagni et al. 1999; Colombini et al. 2010). Similarly, when isometric tension is inhibited by varying the levels of the myosin inhibitor BTS, there is again a non-linearity between stiffness and tension (Linari et al. 2009; Colombini et al. 2010). The presence of significant filament compliance is responsible for the sarcomere stiffness not being proportional to the number of attached heads (Goldman and Huxley 1994; Mijailovich et al. 1996). Assuming that tension is proportional to the number of attached heads, Linari et al. (2009) deduced that filament compliance contributed 66% of the half-sarcomere compliance.
However, attached heads will contribute little to isometric tension before they undergo the tension-generating step (Ford et al. 1986) and hence tension would be expected to depend not only on the number of attached heads, but on what proportion of these are in the post-tensing state. During activation, unless the tension-generation step is in fast equilibrium, the ratio of heads in the post-tensing state to those in the pre-tensing state would be expected to increase with time until the tension plateau is reached. Similarly BTS would affect not only the number of attached heads, but the fraction of those heads in the post-tensing state. Colombini et al. (2010) found that the plots of stiffness against tension both for activation and for inhibition by BTS were not well fitted if the curvature were due solely to filament compliance. However, they obtained an excellent fit with a model having a fixed number of heads (14% of those in an isometric contraction) that exerted no tension (and presumed to be in the pre-tensing state) and with the filament compliance contributing only 37% of the half-sarcomere compliance in an isometric contraction. In support of their model, the critical force increased linearly with the tension both during activation and in BTS-treated fibres but the plot did not pass through the origin, consistent with the presence of a fixed number of zero-force crossbridges. This could come about if the attachment/detachment of pre-tensing heads were relatively fast and nearly in equilibrium while BTS inhibited the tensing step. A plot of total half-sarcomere strain against tension was non-linear and Colombini et al. (2010) concluded that the filaments and/or the crossbridges were displaying non-Hookean behaviour. However, the number of attached heads was not constant and hence their results do not prove that filaments and/or crossbridges would exhibit non-Hookean behaviour when subject to a sudden length step.
Concluding remarks
-
(1)
The contribution of crossbridges to half-sarcomere compliance is obtained by subtracting from the half-sarcomere compliance the contributions from thin and thick filament compliance. All of these have sizable errors making the error in the contribution of crossbridges substantial. Furthermore the calculation of crossbridge stiffness requires a knowledge of the fraction of heads attached in an isometric contraction and there is currently no consensus on this. All this means that it is difficult to assess whether the differences in myosin head stiffness from different species that have been reported are, or are not, real.
-
(2)
Because the crossbridge stiffness has a major role in determining the rate constants of the tension-generating step as well as of the rate of attachment and detachment of heads (e.g. Smith and Geeves 1995), it would have been expected that variations between different muscle and different species would be subtle, particularly if the stroke distance were relatively constant. Hence it would not be expected for there to be such a marked difference between the crossbridge stiffness in Rana temporaria and Rana esculenta (2.18 ± 0.52 pN/nm and 1.32 ± 0.22 pN/nm respectively assuming 50% of the heads are attached). A statistical t-test shows that these means are not significantly different.Footnote 9 In our view therefore the best estimate of the stiffness of myosin heads from frog muscle is the average, 1.75 pN/nm, of these means. This is not significantly different from the value found for rabbit myosin heads both from mechanical studies of muscle (Linari et al. 1998) and from optical trap studies on rabbit S1 (Lewalle et al. 2008). The much lower value, 0.29 pN/nm, reported for the stiffness of myosin heads in human soleus muscle (Seebohm et al. 2009) is puzzling because, unless the stroke distance is much higher than for fast muscles, it is difficult to see how a high efficiency could be achieved. This low value may be caused by an overestimate of half-sarcomere compliance in this muscle as the duration of the length ramps was much longer than in the experiments of Ford et al. (1977) and Piazzesi et al. (2003).
-
(3)
Eisenberg and Hill (1978) pointed out that tension-generating conformational changes would be expected to be rapid on the time scale of filament sliding. So although the lifetime of each attached state is finite, the transition between conformational states would occur essentially instantaneously, and unaccompanied by filament sliding. If the crossbridge compliance were located in subfragment-2, the lever arm could swing without filament sliding and concomitantly with the tensing step. However, current indications are that much of the compliance resides in the pliant region, the link between the converter and lever arm, while the lever arm is relatively stiff. This implies that the lever arm can swing only as (or if) the filaments slide. On this view the swinging of the lever arm is an elastic response separated in time from the change of conformational state, the tensing step. This radically changes our perception of how tension is generated and the role of the lever arm. Previously there has been an implicit assumption that the swinging of the lever arm generated tension. In the new scenario the tensing step is still a change of conformation within the motor domain that is associated with a rotation of the converter, with the proviso that significant contribution to the tension may also come from the axial shift ~3.6–5 nm of the pliant region of the converter (Burgess et al. 2002). But in this new scenario this conformational change does not appreciably change the lever arm angle or cause it to bend and hence would not be readily detectable, for example by X-ray diffraction. Rather, the rotation of the converter strains the pliant region by bending it, causing the lever arm passively to transmit tension to subfragment-2 and thence the thick filament backbone (Fig. 1). Note that the axial strain in the pliant region itself is relatively small but is amplified by the lever arm so that the far end of the lever arm at the head–tail junction has a much larger axial strain. On this view the swing of the lever arm is not the generator of tension. Indeed in an isometric contraction, despite the high tension developed, the lever arm might never swing. The lever arm would swing only as the filaments slid reducing the strain in the pliant region and would thus be associated with the decline of tension in that head (Fig. 1). And so the lever arm swing should instead be seen as the effector of movement translating the energy stored in the pliant region into work. This is consistent with the finding that if the length of the lever arm is altered, the velocity of sliding in gliding assays is linearly dependent on the length of the lever arm (Uyeda et al. 1996). As far as we are aware, the effect of lever arm length on tension has not been studied. If the torque developed at the pliant region after a tensing step remained the same as the lever arm length were varied, we might expect the tension developed to vary inversely with the lever arm length. A similar view that tension generation is not necessarily accompanied by lever arm swing has been recently briefly expressed by Mansson (2010a, b, supporting material); he suggests that the lever arm swings during a rapid length change but not during the subsequent tension recovery. An instructive comparison can be made with the appearance of the heads of myosin V as it steps along actin. Electron microscopy shows the lead head to be exerting tension on the trail head, yet the lever arm of the lead head does not swing until the trail head detaches (Burgess et al. 2002; Dunn and Spudich 2007). Despite exerting tension, the converter of the lead head is in the pre-tensing position, raising the intriguing possibility that there is compliance within the tension-generating chain of switch II, relay and converter (Peter Knight, personal communication). The proposal that the tensing step is a separate event from the lever arm swing helps to reconcile different viewpoints e.g. the near-continuous swing of the lever arms suggested by Huxley et al. (2006a, b), the wide range of lever arm angles in insect flight muscle (Taylor et al. 1999) and the crystallographic results suggesting a very limited number of myosin motor domain conformations.
-
(4)
It is currently unclear whether tension generation in skeletal muscle occurs in a single step or, as in vertebrate smooth muscle, in two steps (Nyitrai and Geeves 2004). Modelling studies of the crossbridge cycle show that to fit both the force velocity relation of muscle and the tension response to rapid length steps reasonably well with a low-cooperativity mechanism and a single tension-generating step requires a stroke distance of 5–8 nm and a crossbridge stiffness of 1.2–2.0 pN/nm (Offer and Ranatunga, unpublished). A low-cooperativity mechanism with two tension-generating steps fits the data better and requires the stroke distance of each of the steps to be 4–5 nm (totalling 8–10 nm), and a crossbridge stiffness of 1.2–2.0 pN/nm. We conclude that a low-cooperativity mechanism with only one or two tension-generating steps in the crossbridge cycle is compatible with the experimental data on crossbridge stiffness.

Distinction between tensing and lever arm swing. In the tension-generating (tensing) step the conformational change in the motor domain (red ellipse) attached to an actin subunit (dark blue circles) causes rotation of the converter (white triangle) and bending of the pliant region (black spring) transmitting tension to the thick filament backbone (brown cylinder) via subfragment-2 (yellow rectangle). There is only minimal change in the angle of the lever arm (green rectangle) in this step. Only if the filaments slide does the lever arm swing in its working stroke (stroking), passively releasing the strain in the pliant region. The diagram is schematic only and not drawn to scale. If there were two tension-generating steps, the converter and pliant region would rotate twice and the lever arm swing might occur in two stages
Notes
A full description would need us to take note of the possibility that the filaments in a half-sarcomere might not be in perfect register and that there may be significant differences in the sarcomere length along a fibre (Edman and Reggiani, 1987). Here we focus on the independence of neighbouring crossbridges along a half thick filament.
There is of course a continuum of possible mechanisms. At one end of the spectrum the crossbridge stiffness would be zero and heads would execute the crossbridge cycle completely independently of one another. At the other end of the spectrum the stiffness would be infinite and heads would be completely cooperative. Here we contrast the two types of behaviour that have been proposed.
Our colleague, Professor John Squire, points out to us that this is by no means obvious. Two inclined poles joined at the top and inserted into the ground to form an inverted V-shape display a very much greater resistance to lateral movement than a single pole. This is because the poles are resistant to compression but can be bent relatively easily.
Here and elsewhere in this review, standard errors for crossbridge compliance are given whether or not they were explicitly stated in the references cited.
In their paper they omit the qualification "standard" before free energy. Nevertheless, it is clear from the context that this it is the standard free energy of the tension-generating step that they determined.
The standard errors given are as published. In calculating the standard errors for the rigor and active crossbridge compliances, Linari et al. appear to have neglected their error in estimating the filament compliance. If this is included in the calculation, the fraction of heads attached is 0.33 ± 0.11.
It was supposed by these authors that on detaching the heads were in a new, previously unrecognised, state which could rapidly reattach.
This type of explanation was later extended to muscle shortening at low to moderate velocities when it was proposed that the variation in tension with velocity was also largely due to variation of the number of attached heads attached, with the average force exerted by attached heads remaining relatively constant (Piazzesi et al. 2007).
In making this test we have assumed that the number of experimental observations for Rana esculenta was similar to the number for Rana temporaria.
We use the term change in standard Gibbs energy when the occupancies of pre-tensing and post-tensing heads are equal but with no implication that the change is occurring at the commonly used reference temperature of 25°C.
References
Bagni MA, Cecchi G, Colomo F, Poggesi C (1990) Tension and stiffness of frog muscle fibres at full filament overlap. J Muscle Res Cell Motil 11:371–377
Bagni MA, Cecchi G, Colombini B, Colomo F (1999) Sarcomere tension-stiffness relation during the tetanus rise in single frog muscle fibres. J Muscle Res Cell Motil 20:469–476
Bagni MA, Colombini B, Amenitsch H, Bernstoff S, Ashley CC, Rapp G, Griffiths PJ (2001) Frequency-dependent distortion of meridional intensity changes during sinusoidal length oscillations of activated skeletal muscle. Biophys J 80:2809–2822
Bagni MA, Cecchi G, Colombini B (2005) Crossbridge properties investigated by fast ramp stretching of activated frog muscle fibres. J Physiol 565:261–268
Barclay CJ (1998) Estimation of cross-bridge stiffness from maximal thermodynamic efficiency. J Muscle Res Cell Motil 19:855–864
Barclay CJ, Woledge RC, Curtin NA (2010) Inferring crossbridge properties from skeletal muscle energetics. Prog Biophys Mol Biol 102:53–71
Bershitsky SY, Tsaturyan AK (1992) Tension responses to Joule temperature jump in skinned rabbit muscle fibres. J Physiol 447:425–448
Bershitsky SY, Tsaturyan AK, Beshitskaya ON, Mahinov GI, Brown P, Burns R, Ferenczi MA (1997) Muscle force is generated by myosin heads stereospecifically attached to actin. Nature 388:186–190
Brenner B, Yu LC (1991) Characterization of radial force and radial stiffness in Ca2+-activated skinned fibres of the rabbit psoas muscle. J Physiol 441:703–718
Brunello E, Reconditi M, Elangovan R, Linari M, Sun YB, Narayanan T, Panine P, Piazzesi G, Irving M, Lombardi V (2007) Skeletal muscle resists stretch by rapid binding of the second motor domain of myosin to actin. Proc Natl Acad Sci USA 104:20114–20119
Burgess SA, Walker M, Wang F, Sellers JR, White HD, Knight PJ, Trinick J (2002) The prepower stroke conformation of myosin V. J Cell Biol 159:983–991
Capitanio M, Canepari M, Cacciafesta P, Lombardi V, Cicchi R, Maffei M, Pavone FS, Bottinelli R (2006) Two independent mechanical events in the interaction cycle of skeletal muscle myosin with actin. Proc Natl Acad Sci USA 103:87–92
Cecchi G, Griffiths PJ, Taylor S (1982) Muscular contraction—kinetics of crossbridge attachment studied by high-frequency stiffness measurements. Science 217:70–72
Cecchi G, Griffiths PJ, Taylor S (1986) Stiffness and force in activated frog skeletal muscle fibers. Biophys J 49:437–451
Colombini B, Bagni MA, Romano G, Cecchi G (2007a) Characterization of actomyosin bond properties in intact skeletal muscle by force spectroscopy. Proc Natl Acad Sci USA 104:9284–9289
Colombini B, Nocella M, Benelli G, Cecchi G, Bagni MA (2007b) Crossbridge properties during force enhancement by slow stretching in single intact frog muscle fibres. J Physiol 585:607–615
Colombini B, Nocella M, Benelli G, Cecchi G, Bagni MA (2008) Effect of temperature on cross-bridge properties in intact frog muscle fibers. Am J Physiol Cell Physiol 294:C1113–C1117
Colombini B, Nocella M, Bagni MA, Griffiths PJ, Cecchi G (2010) Is the cross-bridge stiffness proportional to tension during muscle fiber activation? Biophys J 98:2582–2590
Cooke R (1997) Actomyosin interaction in striated muscle. Physiol Rev 77:671–697
Craig R, Offer G (1976) Axial arrangement of crossbridges in thick filaments of vertebrate skeletal muscle. J Mol Biol 102:325–332
Decostre V, Bianco P, Lombardi V, Piazzesi G (2005) Effect of temperature on the working stroke of muscle myosin. Proc Natl Acad Sci USA 102:13927–13932
Dobbie I, Linari M, Piazzesi G, Reconditi M, Koubassova N, Ferenczi MA, Lombardi V, Irving M (1998) Elastic bending and active tilting of myosin heads during muscle contraction. Nature 396:383–387
Dominguez R, Freyzon Y, Trybus KM, Cohen C (1998) Crystal structure of a vertebrate smooth muscle myosin motor domain and its complex with the essential light chain: visualisation of the pre-power-stroke state. Cell 94:559–571
Douglas R (1948) Temperature and rate of development of the eggs of British Anura. J Animal Ecol 17:189–192
Duke TAJ (1999) Molecular model of muscle contraction. Proc Natl Acad Sci USA 96:2770–2775
Duke T (2005) Cooperativity of myosin molecules through strain-dependent chemistry. Phil Trans R Soc B 355:529–538
Dunaway D, Fauver M, Pollack G (2002) Direct measurement of single synthetic vertebrate thick filament elasticity using nanofabricated cantilevers. Biophys J 82:3128–3133
Dunn AR, Spudich JA (2007) Dynamics of the unbound head during myosin V processive translocation. Nat Struct Mol Biol 14:246–248
Edman KAP (2009) Non-linear myofilament elasticity in frog intact muscle fibres. J Exp Biol 212:1115–1119
Edman KAP (2010) Response to ‘there is no experimental evidence for non-linear myofilament elasticity in skeletal muscle’. J Exp Biol 213:659
Edman KAP, Reggiani C (1987) The sarcomere length-tension relation determined in short segments of intact muscle fibres of the frog. J Physiol 385:709–732
Eisenberg E, Hill TL (1978) A cross-bridge model of muscle contraction. Prog Biophys Mol Biol 33:55–82
Fisher AJ, Smith CA, Thoden JB, Smith R, Sutoh K, Holden HM, Rayment I (1995) X-ray structures of the myosin motor domain of dictyostelium discoideum complexed with MgADP∙BeFx and MgADP∙AlF4 −. Biochemistry 34:8960–8972
Forcinito M, Epstein M, Herzog W (1997) Theoretical considerations on myofibril stiffness. Biophys J 72:1278–1286
Ford LE, Huxley AF, Simmons RM (1977) Tension responses to sudden length change in stimulated frog muscle fibres near slack length. J Physiol 269:441–515
Ford LE, Huxley AF, Simmons RM (1981) The relation between stiffness and filament overlap in stimulated frog muscle fibres. J Physiol 311:219–249
Ford LE, Huxley AF, Simmons RM (1986) Tension transients during the rise of tetanic tension in frog muscle fibres. J Physiol 372:595–609
Fusi L, Reconditi M, Linari M, Brunello E, Elangovan R, Lombardi V, Piazzesi G (2010) The mechanism of the resistance to stretch of isometrically contracting single muscle fibres. J Physiol 588:495–510
Galler S, Hilber K (1998) Tension/stiffness ratio of skinned rat skeletal muscle fibre types at various temperatures. Acta Physiol Scand 162:119–126
Geeves MA, Holmes KC (1999) Structural mechanism of muscle contraction. Ann Rev Biochem 68:687–728
Goldman YE, Simmons RM (1977) Active and rigor muscle stiffness. J Physiol 269:55P–57P
Goldman YE, McCray JA, Ranatunga KW (1987) Transient tension changes initiated by laser temperature jump in rabbit psoas muscle fibres. J Physiol 392:71–95
Gourinath S, Himmel DM, Brown JH, Reshetnikova L, Szent-Györgyi AG, Cohen C (2003) Crystal structure of scallop myosin S1 in the pre-power stroke state to 2.6 Å resolution: flexibility and function in the head. Structure 11:1621–1627
Griffiths PJ, Bagni MA, Colombini B, Amenitsch H, Bernstorff S, Ashley CC, Cecchi G (2002) Changes in myosin S1 orientation and force induced by a temperature increase. Proc Natl Acad Sci USA 99:5384–5389
Griffiths PJ, Bagni MA, Colombini B, Amenitsch H, Bernstorff S, Funari S, Ashley CC, Cecchi G (2006) Effects of the number of actin-bound S1 and axial force on X-ray patterns of intact skeletal muscle. Biophys J 90:975–984
Haselgrove JC, Huxley HE (1973) X-ray evidence for radial cross-bridge movement and for the sliding filament model in actively contracting skeletal muscle. J Mol Biol 77:549–568
Higuchi H, Yanagida T, Goldman YE (1995) Compliance of thin filaments in skinned fibers of rabbit skeletal muscle. Biophys J 69:1000–1010
Holmes KC (1997) The swinging lever arm hypothesis of muscle contraction. Curr Biol 7:R112–R118
Houdusse A, Szent-Györgyi A, Cohen C (2000) Three conformational states of scallop myosin S1. Proc Natl Acad Sci USA 97:11238–11243
Huxley AF (1957) Muscle structure and theories of contraction. Prog Biophys Biophys Chem 7:255–318
Huxley HE (1969) The mechanism of muscular contraction. Science 164:1356–1366
Huxley HE (1995) The working stroke of myosin crossbridges. Biophys J 68:55s–58s
Huxley HE, Kress M (1985) Crossbridge behaviour during muscle contraction. J Muscle Res Cell Motil 6:153–161
Huxley AF, Simmons RM (1971a) Proposed mechanism of force generation in striated muscle. Nature 233:533–538
Huxley AF, Simmons RM (1971b) Mechanical properties of the cross-bridges of frog striated muscle. J Physiol 218:59P–60P
Huxley AF, Tideswell S (1996) Filament compliance and tension transients in muscle. J Muscle Res Cell Motil 17:507–511
Huxley HE, Faruqi AR, Kress M, Bordas J, Koch MHJ (1982) Time-resolved X-ray diffraction studies of the myosin layer-line reflections during muscle contraction. J Mol Biol 158:637–684
Huxley HE, Stewart A, Sosa H, Irving T (1994) X-ray diffraction measurements of the extensibility of actin and myosin filaments in contracting muscle. Biophys J 67:2411–2421
Huxley HE, Reconditi M, Stewart A, Irving T (2006a) X-ray interference studies of crossbridge action in muscle contraction: evidence from quick releases. J Mol Biol 363:743–761
Huxley HE, Reconditi M, Stewart A, Irving T (2006b) X-ray interference studies of crossbridge action in muscle contraction: evidence from muscles during steady shortening. J Mol Biol 363:762–772
Julian FJ, Morgan DL (1981) Tension, stiffness, unloaded shortening speed and potentiation of frog muscle fibres at sarcomere lengths below optimum. J Physiol 319:205–217
Katz B (1939) The relation between force and speed in muscular contraction. J Physiol 96:45–64
Kawai M, Kido T, Vogel M, Fink RHA, Ishiwata S (2006) Temperature change does not affect force between regulated actin filaments and heavy meromyosin in single molecule experiments. J Physiol 574:877–878
Knupp C, Offer G, Ranatunga KW, Squire JM (2009) Probing muscle myosin motor action: X-ray (M3 and M6) interference measurements report motor domain not lever arm movement. J Mol Biol 390:168–181
Köhler J, Winkler G, Schulte I, Scholz T, McKenna W, Brenner B, Kraft T (2002) Proc Natl Acad Sci USA 99:3557–3562
Kojima H, Ishijima A, Yanagida T (1994) Direct measurement of stiffness of single actin filaments with and without tropomyosin by in vitro nano-manipulation. Proc Natl Acad Sci USA 91:12962–12966
Lewalle A, Steffen W, Stevenson O, Ouyang Z, Sleep J (2008) Single-molecule measurement of the stiffness of the rigor myosin head. Biophys J 94:2160–2169
Linari M, Dobbie I, Reconditi M, Koubassova N, Irving M, Piazzesi G, Lombardi V (1998) The stiffness of skeletal muscle in isometric contraction and rigor: the fraction of myosin heads bound to actin. Biophys J 74:2459–2473
Linari M, Lucii L, Reconditi M, Vannicello Casoni ME, Amenitsch H, Bernstorff S, Piazzesi G, Lombardi V (2000) A combined mechanical and X-ray diffraction study of stretch potentiation in single frog muscle fibres. J Physiol 526:589–596
Linari M, Caremani M, Piperio C, Brandt P, Lombardi V (2007) Stiffness and fraction of myosin motors responsible for active force in permeabilized muscle fibers from rabbit psoas. Biophys J 92:2476–2490
Linari M, Piazzesi G, Lombardi V (2009) The effect of myofilament compliance on kinetics of force generation by myosin motors in muscle. Biophys J 96:583–592
Lombardi V, Piazzesi G (1990) The contractile response during steady lengthening of stimulated frog muscle fibres. J Physiol 431:141–171
Månsson A (2010a) Actomyosin-ADP states, interhead cooperativity, and the force-velocity relation of skeletal muscle. Biophys J 98:1237–1246
Månsson A (2010b) Significant impact on muscle mechanics of small non-linearities in myofilament elasticity. Biophys J 99:1869–1875
Matsubara I, Elliott GF (1972) X-ray diffraction studies on skinned single fibres of frog skeletal muscle. J Mol Biol 72:657–669
Maughan DW, Godt RE (1979) Stretch and radial compression studies on relaxed skinned muscle fibres of the frog. Biophys J 28:391–402
Mehta AD, Finer JT, Spudich J (1997) Detection of single molecule interactions using correlated thermal energies. Proc Natl Acad Sci USA 94:7927–7931
Mijailovich SM, Fredberg JJ, Butler JP (1996) On the theory of muscle contraction: filament extensibility and the development of isometric force and stiffness. Biophys J 71:1475–1484
Mobley BA, Eisenberg BM (1975) Sizes of components in frog skeletal muscle measured by methods of sterology. J Gen Physiol 66:31–45
Nyitrai M, Geeves MA (2004) Adenosine diphosphate and strain sensitivity in myosin motors. Phil Trans R Soc B 359:1867–1877
Page SG, Huxley HE (1976) Filament lengths in striated muscle. J Cell Biol 19:369–390
Piazzesi G, Reconditi M, Koubassova N, Decostre V, Linari M, Lucii L, Lombardi V (2003) Temperature dependence of the force-generating process in single fibres from frog skeletal muscle. J Physiol 549:93–106
Piazzesi G, Reconditi M, Linari M, Lucii L, Bianco P, Brunello E, Decostre V, Stewart A, Gore DB, Irving TC, Irving M, Lombardi V (2007) Skeletal muscle performance determined by modulation of number of myosin motors rather than motor force or stroke size. Cell 131:784–795
Pinniger GJ, Ranatunga KW, Offer GW (2006) Crossbridge and non-crossbridge contributions to tension in lengthening rat muscle: force-induced reversal of the power stroke. J Physiol 573:627–643
Ranatunga KW, Coupland ME, Pinniger GJ, Roots H, Offer GW (2007) Force generation examined by laser temperature-jumps in shortening and lengthening mammalian (rabbit psoas) muscle fibres. J Physiol 585:263–277
Ranatunga KW, Roots H, Offer GW (2010) Temperature jump induced force generation in rabbit muscle fibres gets faster with shortening and shows a biphasic dependence on velocity. J Physiol 588:479–493
Rayment I, Holden HM, Whittaker M, Yohn CB, Lorenz M, Holmes KC, Milligan RA (1993) Structure of the actin-myosin complex and its implications for muscle contraction. Science 261:58–65
Reconditi M (2010) There is no experimental evidence for non-linear myofilament elasticity in skeletal muscle. J Exp Biol 213:658–659
Reconditi M, Linari M, Lucii L, Stewart A, Sun Y-B, Boesecke P, Narayanan T, Fischetti RF, Irving T, Piazzesi G, Irving M, Lombardi V (2004) The myosin motor in muscle generates a smaller and slower working stroke at higher load. Nature 428:578–581
Seebohm B, Matinbehr F, Köhler J, Francino A, Navarro-Lopez F, Perrot A, Ozcelik C, McKenna WJ, Brenner B, Kraft T (2009) Cardiomyopathy mutations reveal variable region of myosin converter as major element of cross-bridge compliance. Biophys J 97:806–824
Smith DA, Geeves MA (1995) Strain-dependent cross-bridge cycle for muscle. Biophys J 69:524–537
Smith CA, Rayment I (1996) X-ray structure of the magnesium (II). ADP vanadate complex of the dictyostelium discoideum myosin motor domain to 1.9 Å resolution. Biochemistry 35:5404–5417
Smith NP, Barclay CJ, Loiselle DS (2005) The efficiency of muscular contraction. Prog Biophys Mol Biol 88:1–58
Taylor K, Schmitz H, Reedy MC, Goldman YE, Franzini-Armstrong C, Sasaki H, Tregear RT, Poole K, Lucaveche C, Edwards RJ, Chen LF, Winkler H, Reedy MK (1999) Tomographic 3D reconstruction of quick-frozen Ca2+-activated contracting insect flight muscle. Cell 99:421–431
Uyeda TQ, Abramson PD, Spudich JA (1996) The neck region of the myosin motor domain acts as a lever arm to generate movement. Proc Natl Acad Sci USA 93:4459–4464
Veigel C, Bartoo ML, White DCS, Sparrow JC, Molloy J (1998) The stiffness of rabbit skeletal actomyosin cross-bridges determined with an optical tweezers transducer. Biophys J 75:1424–1438
Wakabayashi K, Sugimoto Y, Tanaka H, Ueno Y, Takezawa Y, Amemiya Y (1994) X-ray diffraction evidence for the extensibility of actin and myosin filaments during muscle contraction. Biophys J 67:2422–2435
Yagi N (2003) An X-ray diffraction study on early structural changes in skeletal muscle contraction. Biophys J 84:1093–1102
Yagi N, Amemiya Y, Wakabayashi K (1995) A real-time observation of X-ray diffraction from frog skeletal muscle during and after slow length changes. Jpn J Physiol 45:583–606
Yu LC, Steven AC, Naylor GRS, Gamble RC, Podolsky RJ (1985) Distribution of mass in relaxed frog skeletal muscle and its redistribution upon activation. Biophys J 47:311–321
Acknowledgements
We thank Ed Taylor (Northwestern University), Peter Knight (University of Leeds), Howard White (East Virginia Medical School), John Squire (University of Bristol) and Carlo Knupp (University of Cardiff) for valuable discussions.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1: Density of myosin heads in myofibrils and fibres
A cross-section through a myofibril joining the centres of three neighbouring thick filaments at the vertices of an equilateral triangle has an area of \( {\frac{\sqrt 3 }{4}}d^{2} \), where d nm is the centre-to-centre spacing between the thick filaments. The cross-section includes half a thick filament and one thin filament. So there are \( {\frac{{2.10^{6} }}{{\sqrt 3 d^{2} }}} \) thick filaments per μm2 cross-sectional area of myofibrils. In each half-thick filament there are 49 crowns of heads, each comprising 3 myosin molecules and therefore 6 myosin heads. So there are 294 myosin heads per half-thick filament. Thus there are \( {\frac{{2.294.10^{6} }}{{\sqrt 3 d^{2} }}} \) myosin heads in a half sarcomere per μm2 cross-sectional area of myofibrils.
For frog muscle at s = 2.1 μm, d = 43 (Matsubara and Elliott 1972). Hence there are 1.84 × 105 myosin heads in a half sarcomere per μm2 of myofibrils. In this fast muscle, the myofibrils occupy a fraction 0.83 of the cross-sectional area (Mobley and Eisenberg 1975), so the total number of myosin heads in a half-sarcomere per μm2 cross-sectional area of fibre is 1.53 × 105.
For skinned relaxed rabbit psoas fibres at s = 2.3–2.4 μm d 1,0 = 42 nm (Brenner and Yu 1991) and hence d = 48 nm. Hence assuming that the myofibrils in this muscle also occupy a fraction 0.83 of the cross-sectional area of a fibre, the number of myosin heads in a half-sarcomere per μm2 cross-sectional area of fibre is 1.22 × 105. In human soleus muscle, because of the high numbers of mitochondria, the myofibrils occupy perhaps only a fraction ~0.5 of the cross-sectional area of the fibre, so the number of myosin heads in a half-sarcomere per μm2 cross-sectional area of fibre would be lower, ~0.74 × 105.
Appendix 2: Temperature dependence of the standard Gibbs (free) energy of the tension-generating step
Decostre et al. (2005) and Linari et al. (2007) have claimed that the increased fall in standard Gibbs (free) energy for the tension-generating step for a rise in absolute temperature from t 1 to t 2, \( \Updelta G_{{t_{2} - t_{1} }} \), is equal to the increase in mechanical energy stored in the crossbridge compliant element and hence consider it gives information on the crossbridge stiffness. We think this is incorrect. To demonstrate this we shall consider for simplicity the case for a single tension-generating step and, for this purpose only, follow Decostre et al. in assuming that this step is in equilibrium. We shall also for simplicity ignore filament compliance.
Consider the tension-generating step in muscle where the heads are tethered to the thick filament backbone. We shall suppose for simplicity that before this step heads have zero strain, but that after they have executed this step, they have strain l, the stroke distance. Then when the tension-generating step occurs, work will be done on the crossbridge compliant element equal to \( \kappa l^{2} /2 \) per molecule where κ is the stiffness of the myosin heads.
In muscle the change in standardFootnote 10 Gibbs (free) energy per molecule accompanying the tension-generating step is made up of two components: firstly that due to the change in conformational state (which would be the same for actomyosin in solution), and secondly this work term (Huxley and Simmons 1971a, b; Eisenberg and Hill 1978). These are tightly coupled i.e. if there is a change in conformational state there is necessarily work done on the compliant element. So in muscle at temperature t 1, the change in standard Gibbs energy between the pre-tensing state and the post-tensing state, \( \Updelta G_{{m,t_{1} }}^{0} \), is equal to that in solution, \( \Updelta G_{{s,t_{1} }}^{0} \), plus the work done in the conversion between these two states.
Similarly at the higher temperature t 2, the change in standard Gibbs energy for the conversion between the pre-tensing and post-tensing states, \( \Updelta G_{{m,t_{2} }}^{0} \), is equal to that in solution at this higher temperature, \( \Updelta G_{{s,t_{2} }}^{0} \), plus the work done.
Although the fall in standard Gibbs energy in solution is greater at the higher temperature, in muscle the work done for the conversion between the pre-tensing and post-tensing states at the two temperatures is the same. So the increase with rise of temperature for the fall in Gibbs standard energy for the conversion between these two states in muscle, \( \Updelta G_{{t_{2} - t_{1} }} \), is the same as in solution and is simply
where ΔS s is the entropy change per molecule for the conformational change between the two states in actomyosin in solution. Note this expression for \( \Updelta G_{{t_{2} - t_{1} }} \) carries no work term and therefore gives no information about the crossbridge stiffness.
We now derive an expression for the increase in fall of standard Gibbs energy at the higher temperature in terms of the average strain in the crossbridges at the two temperatures. The greater strain in the crossbridges at the higher temperature arises because the rise in temperature increases the equilibrium constant of the tension-generating step. If \( o_{{pre,t_{1} }} \) and \( o_{{post,t_{1} }} \) are the fractions of the heads in the pre- and post-tensing states at temperature t 1, the equilibrium constant for the tension-generating step in muscle at this temperature,\( K_{{m,t_{1} }} \), is given by
The average strain in the attached heads at this temperature is given by
But the equilibrium constant for the tension-generating step in muscle at this temperature is also given by \( \Updelta G_{{m,t_{1} }}^{0} = - k_{B} t_{1} \ln K_{{m,t_{1} }} \).
Similarly, at the higher temperature
Hence the increase in the standard Gibbs energy fall of the tension-generating step when the temperature is raised from t 1 to t 2 is
This equation, linking the increase in fall of standard Gibbs energy when the temperature is raised, to the change in strain is clearly very different from the equation proposed by Decostre et al. (2005). Equation 11 does not contain κ and again shows that \( \Updelta G_{{t_{2} - t_{1} }} \) gives no information on the crossbridge stiffness.
Rights and permissions
About this article
Cite this article
Offer, G., Ranatunga, K.W. Crossbridge and filament compliance in muscle: implications for tension generation and lever arm swing. J Muscle Res Cell Motil 31, 245–265 (2010). https://doi.org/10.1007/s10974-010-9232-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10974-010-9232-7