
Abstract
This paper provides a novel analysis of the rich and complex propagation dynamics to a model of precursor and differentiated cells, with the appearance of non-isolated equilibria on a line in the phase space. We established the existence of traveling waves in the monostable monotone case by means of continuation argument via perturbation in a weighted functional space, by applying the abstract implicit function theorem. We proved necessary and sufficient conditions of the minimal wave speed selection and showed the existence of the transition (turning point) \(k^*\) for the minimal wave speed when the parameters \(\lambda \) and \(\gamma \) are fixed. Two explicit estimates about \(k^*\) were given by the easy-to-apply theorem we derived. We investigated the decay rate of the minimal traveling wave as \(z\rightarrow \infty \) in terms of the value of k. We further proved the existence of non-negative wavefronts in the monostable non-monotone case and found that the minimal wave speed is always linearly selected. Finally in the bistable monotone case, the existence and uniqueness of bistable traveling waves were proved via constructing an auxiliary parabolic non-local equation.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Mathematical models have been of great significance in studying biological systems of migrating and proliferating cells (see the references in [17, 38, 40, 42]). Here, we consider a population system of migrating, proliferating and differentiating cells that invade a certain region, motivated by experimental studies of developing enteric nervous system:
Here, c(t, x) and n(t, x) are the population of precursor and differentiated cells at time t and location x, respectively. The parameter d is the diffusion coefficient of precursor cells. By experiment, the differentiated cells have negligible migratory capability compared with the precursor cells so that its diffusion rate can be viewed as zero in the model. Proliferation of the precursor cells is modeled by the logistic growth term with a proliferation rate \(\sigma \) and a carrying capacity \(\rho _1\). The parameter \(\gamma \) is the relative contribution that the differentiated cell population makes to the carrying capacity. Differentiation is limited by a carrying capacity \(\rho _2\) for the differentiated cells and has a maximum rate \(\vartheta \). For more information on the biological background of this model, see [38, 40, 42] and references therein.
For the developing enteric nervous system, the colonization process is time-sensitive (Farlie et al. [13]), as the failure of neural crest cells in colonizing the required length of the gut finally results in a developmental disorder known as Hirschsprung’s disease (Newgreen and Young[38]). The development of this process seems propagative or invasive, linking mathematically to an important nonlinear phenomenon such as traveling wavefronts to the precursor and differentiated cells. The results we obtain may assist experimentalists in identifying the resource that limits the proliferation of precursor cells so as to find effective treatments.
Scale (1.1) by
and drop the prime notation for convenience. It yields
where \(\lambda =\frac{\vartheta }{\sigma }\), and \(k=\frac{\rho _1}{\rho _2}\). The parameter \(\lambda \) is the ratio of the differentiation and proliferation rates of the precursor cells, and k is the ratio of the carrying capacities of the precursor and differentiated cell populations. All parameters are non-negative, and we always assume \(\frac{\gamma }{k} <1\) so that a positive equilibrium exists. System (1.2) has infinite number of constant equilibria
where a is an arbitrary non-negative constant. If \(a=0\), then \(e_0=(0,0)\). The kinetic system of model (1.2) is
The particular importance of parameter \(\lambda \) is that the value of this parameter determines whether the system (1.2) is monostable or bistable. Indeed, stability analysis of (1.4) around the equilibria indicates that \(e_\beta \) is stable, and \(e_0\) is unstable for \(\lambda < 1\); \(e_\beta \) is stable, and \(e_0\) is non-asymptotically stable for \(\lambda >1\). That is, \(\lambda =1\) is the transition point so that \(e_\beta \) and \(e_0\) of (1.2) have the typical monostability when \(\lambda \in (0,1)\), and the bistability properties when \(\lambda >1\). Furthermore, system (1.2) transits from monotonic to non-monotonic when \(\lambda k-\gamma \) changes from positive to negative. Observe that system (1.2) becomes the well-known Fisher-KPP equation when \(\lambda k-\gamma =0\), and the related results can be seen in [24]. In this paper, we consider the following three cases of system (1.2):
-
MM
(monostable, monotonic): \(\lambda k-\gamma >0,\quad \lambda <1;\)
-
MN
(monostable, non-monotonic): \(\lambda k-\gamma<0,\quad \lambda <1;\)
-
BM
(bistable, monotonic): \(\lambda k-\gamma>0,\quad \lambda >1.\)
Since we require that \(e_{\beta }\) is positive, the case \(\lambda k-\gamma <0\) with \( \lambda \ge 1\) does not hold in our model. However, for \(\lambda =1\) and \(\lambda k-\gamma >0\), the system becomes exceptional with algebraically decay traveling wave solutions. We will study it separately in the future.
To find a traveling wave solution of system (1.2) connecting two equilibria \(e_\beta \) to \(e_0\), we let
Then the traveling wave speed \(s\in \mathbb {R}\) and (C, N)(z) satisfy
with boundary conditions
In the MM and MN cases when \(\lambda \le 1\), the solution to (1.5)–(1.6) is usually not unique, as can be seen in the classical KPP-Fisher model [15]. Denote \(s_{\min }\) as
Standard linearization near the equilibrium point \(e_0\) shows \(s_{\min }\ge s_0=2\sqrt{1-\lambda }\). For convenience, we give the following definition on the minimal wave speed selection in the monostable case.
Definition 1.1
If \(s_{\min }=s_0\), then we say the minimal wave speed is linearly selected; If \(s_{\min }>s_0\), then the minimal wave speed is said to be nonlinearly selected.
We should mention that in the critical case when \(\lambda k-\gamma =0\), the first equation in (1.5) is independent of N and it becomes the classical Fisher-Kpp equation that is bounded by its linearized system at zero. Thus its minimal speed is always linearly selected, see [24, 25]. Furthermore in the BM case when \(\lambda >1\), the situation is totally different and we will show that there exists a unique (up to translation) traveling wave of (1.5)–(1.6).
While degenerate reaction-diffusion models have attracted extensive attention in the research field (see e.g., [8, 11, 17]), system (1.2) is a complex one exhibiting the so-called sophistic transition dynamics(transition from monostable to bistable, and from monotone to non-monotone, when parameters vary), and due to the appearance of clustering-and-non-isolated equilibria on a line in the phase space (the equilibrium \(e_0\) is not isolated), it becomes much trickier to study model (1.2). Such a characteristics of \(e_0\) prevents us from applying the recent powerful Liang-Zhao general theory [25] or Fang and Zhao’s result [11, 12] of abstract monostable systems to our system. We should mention that via a shooting method, Gibbs[17] proved the existence of traveling waves of the Belousov–Zhabotinskii reaction system similar to (1.2). However, while this approach has geometrical insight, it is not suitable for high-dimensional phase space systems or for nonlocal systems, and the idea in [17] cannot be directly extended to work on our non-monotonic case. Here, in order to overcome the difficulty caused by \(e_0\) non-isolated, we develop new methods to prove the existence of traveling wave solutions for the system with either monostable or bistable nonlinearity. Our method relies on a combination of advanced analysis and dynamical technique, and can be applied to nonlocal problem and high-dimensional phase system. Furthermore, the minimal wave speed selection of (1.5)–(1.6) is another crucial and challenging issue that still needs to be solved. One part of the goals of our paper is to provide a solution to this problem.
For the monostable and monotonic case MM, we prove the existence of traveling waves of system (1.5)–(1.6) by using continuation via perturbation in a weighted functional space and the abstract implicit function theorem. Moreover, a necessary and sufficient conditions to distinguish between linear selection and nonlinear selection are given. We find that the minimal wave speed is non-decreasing with respect to k, when \(\gamma \) and \(\lambda \) are fixed, and there exists a transition (turning) point \(k^*\) for the wave speed selection, at which the wavefront decays like a pair of exponential functions. We also derive an easy-to-apply theorem for speed selection, which can be used to get a series of explict conditions on speed selection by constructing various upper and lower solutions. By applying this theorem, two explicit estimates about \(k^*\) are given. We also give details of the decay rate of the minimal traveling wave as k varies, which implies the transition wave behavies completely different than other pulled waves for \(k<k^*\). For the monostable and non-monotonic case MN, the non-monotonicity of the system invalidates the monotonic dynamical theory and the comparison principle. By constructing a suitable invariant region, we can utilize the Schauder fixed point theorem to prove the existence of non-negative solutions of (1.5)–(1.6). We show that the minimal wave speed is always linearly selected without other restrictions on the system parameters. Last, for the bistable and monotone case BM, we have developed a new method to find the bistable wavefront. Solving the second equation in (1.5) transforms the system into a nonlocal equation with wave speed s also in the reaction term. Consider the wave speed s in the reaction term as a parameter. We then establish the existence of bistable traveling wave to an auxiliary parabolic equation, by constructing appropriate upper and lower solutions and using monotonic dynamic theory in a weighted space. Returing to the original system, we show that there exists at most one (up to translation) bistable traveling wave solution. The novelty of our results in comparison to previous works is in the discussion section.
Finally, we would like to provide readers with a few more references related to our study. The problem of the existence of traveling waves and their speed sign for monotonic systems have been studied in many literatures. See eg., [2, 4, 5, 9, 11, 12, 14, 15, 17, 24, 25, 30, 32, 34, 35, 41, 42, 45, 47,48,49]. For non-monotone systems, the methods used include phase plane analysis, shooting method, Conley index and fixed point theorem, and we refer to [10, 16, 19, 26, 27]. The problem of the minimal speed selection was widely discussed in various models such as the Lotka-Volterra model, Stream-Population model, population genetics, etc. See, e.g., [1, 3, 4, 20, 21, 28, 29, 31, 33, 39, 46, 50, 51].
The remainder of this paper is organized as follows. In Sect. 2, we establish the existence of the monotone traveling wave of (1.5)–(1.6) for the case MM. Then we show results about the minimal wave speed selection and the decay rate of the minimal traveling wave as \(z\rightarrow \infty \), when k is in different value regions. The existence of non-negative solution of (1.5)–(1.6) for the case MN is established in Sect. 3. In Sect. 4, we prove the existence and uniqueness of the monotone bistable traveling wave of (1.5)–(1.6) for the case BM. Numerical results will be presented in Sect. 5. Section 6 is about conclusion and discussion.
2 Traveling Waves and Speed Selection in the Case MM
In this section, we consider system (1.2) in the case MM. Note that \(e_\beta \) is stable, and \(e_0\) is unstable. Linearizing (1.5) at \(e_0\), we obtain the characteristic equation as
which has two roots as follows
Denote \(s_0=2\sqrt{1-\lambda }\) as the linear speed so that \(\mu _1\) and \(\mu _2\) are real when \(s\ge s_0\). In terms of the second equation of system (1.5) and \((C, N)(\infty )=e_0\), N(z) can be expressed as
which is non-decreasing in C(t). After a substitution, system (1.5) becomes a nonlocal equation
with the boundary condition
where N(z) is defined in equation (2.3).
The following theorem gives the existence of the traveling wave of system (1.5)–(1.6) in the case MM.
Theorem 2.1
Assume that MM holds. There is a finite \(s_{\min }\ge s_0\) such that monotone and positive traveling wave solutions of (1.5)–(1.6) exist if and only if \(s\ge s_{\min }\).
Before proving Theorem 2.1, we introduce some important lemmas that play a great role in the proof of the above theorem.
Lemma 2.2
For \(s<s_0\), there exists no non-negative solution of system (1.5)–(1.6).
Proof
Since \(\mu _1\) and \(\mu _2\) are complex for \(s<s_0\), we get that \(e_1\) is a spiral point. Therefore there does not exist a non-negative solution of system (1.5)–(1.6). \(\square \)
Lemma 2.3
Assume that MM holds. We have the following two results:
-
(i)
If (1.5)–(1.6) has a non-increasing traveling wave solution (C(z), N(z)) at \(s=s_2>s_0,\) and \(C(z)\sim A_1e^{-\mu _1(s_2) z}\) as \(z\rightarrow \infty \) with \(A_1>0\), then there exists \(\delta >0\) such that (1.5)–(1.6) has a non-increasing traveling wave solution for \(s=s_2-\delta \);
-
(ii)
If (1.5)–(1.6) has a non-increasing traveling wave solution (C(z), N(z)) at \(s=s_2>s_0\), and \(C(z)\sim A_2e^{-\mu _2(s_2) z}\) as \(z\rightarrow \infty \) with \(A_2>0\), then there exist no non-negative traveling wave solution of (1.5)–(1.6) for \(s<s_2\).
Proof
We first give the proof of result (i). Let \(\alpha \) be large enough so that
is non-decreasing in C. Equation (2.4) can be written as
Define \(\beta _1\) and \(\beta _2\) as
In view of variation of parameters, the integral form of (2.6) is given by
For \(s=s_2>s_0\), suppose there exists a non-increasing traveling wave solution \(C_2(z)\) of (2.4)–(2.5) with \(C_2(z) \sim A_1e^{-\mu _1(s_2) z}\) as \(z\rightarrow \infty \). Then \(C_2(z)\) satisfies
Consider \(s=s_\delta =s_2-\delta <s_2\), and \(\delta \) is sufficiently small to be determined. Let \(\bar{C}(z)=C_2(z) \omega (z)\), where
By way of asymptotic analysis, we have \(\bar{C}(z)\sim \frac{A_1}{\delta }e^{-\mu _1(s_\delta )z}\) as \(z\rightarrow \infty \).
To find the solution of (2.6), say \(C_\delta (z)\) at \(s=s_{\delta }\), let \(C_\delta (z)=\bar{C}(z)+W_1(z)\), where \(W_1(z) \in B_0\) is to be determined, and here \(B_0\) is defined as
If we can prove the existence of \(W_1(z) \in B_0\) such that \(C_\delta (z)\) is a solution of (2.4) or (2.6) with speed \(s_\delta ,\) then result (i) is proved. Substituting \(C_\delta (z)\) into (2.4), and by (2.9), we find that \(W_1\) satisfies
where
Therefore, we have
with \(s=s_2\), where \(T_1\) is as (2.8). Note that \(\omega '=-(\mu _1(s_\delta )-\mu _1(s_2))\omega (1-\omega )\) and \(\omega ''=(\mu _1(s_\delta )-\mu _1(s_2))^2\omega (1-\omega )(1-2\omega )\). Clearly \(T_1(F_\delta )\) is of \(O(\delta )\) when \(\delta \rightarrow 0\). Define
The linear operator T is compact and strongly positive. It has a simple principle eigenvalue \(\lambda =1\) with the associated positive eigenfunction \(-C_2'\). In order to remove this eigenfunction from \(B_0\), we define the following weighted functional space
Since the eigenfunction \(-C_2'\) is not in the space \(\mathcal {H}\), this implies that T does not have eigenvalue \(r=1\) in the functional space \(\mathcal {H}\), that is, \(I-T\) has a bounded inverse in \(\mathcal {H}\), where I is the identity operator. It follows by abstract implicit function theorem that there exists \(\delta _0\) so that a solution \(W_1\) of the equation (2.11) exists for any \(\delta \in [0, \delta _0)\). Hence, there exists a solution \(C_\delta (z)\) of (2.4)–(2.5) with \(s=s_\delta \).
We then give the proof of the result (ii). Assume that there exists \(\hat{s}\in (s_0,s_2)\) such that system (1.2) has a monotone traveling wave solution \((\bar{C},\bar{N})(x-\hat{s}t)\) with initial conditions
Clearly, \((\bar{C},\bar{N})(z)\) satisfies system (1.5) with \(s=\hat{s}\). Since \(\mu _2(s)\) is non-decreasing with respect to s, we get \(\mu _1(\hat{s})\le \mu _2(\hat{s})\le \mu _2(s_2)\). Recall that \(C(z)\sim A_2 e^{-\mu _2(s_2) z}\) as \(z\rightarrow \infty \). It follows that \(C(z)\le \bar{C}(z)\) as \(z\rightarrow \infty \). Note that \(C(z)\sim (1-\frac{\gamma }{k})-A_3e^{\tau z}\) as \(z\rightarrow -\infty \) for positive \(A_3\) and \(\tau \), and \(\tau \) is non-increasing with respect to s. Therefore, \(C(z)\le \bar{C}(z)\) as \(z\rightarrow -\infty \). Making a translation if necessary, we can always have \(C(z)\le \bar{C}(z)\) for all z. According to the second equation of (1.2), we then have \((C,N)(x)\le (\bar{C},\bar{N})(x)\) for all \(x\in \mathbb {R}\) (by shift if necessary). By comparison, it gives that
Fix \(\hat{z}=x-s_2t\) such that \(C(\hat{z})>0\). Observe that
Thus, we obtain
which contradicts the fact \(C(\hat{z})>0\). Therefore, there is no traveling wave solution of system (1.5)–(1.6) for any \(\hat{s}\in [s_0,s_2)\). \(\square \)
We now prove that for large wave speed s, system (1.5)–(1.6) has traveling wave solutions via upper/lower solution method. Indeed, for any \(s>s_0\), define a continuous function
where \(0<\delta _1\ll 1\), M is a positive constant to be determined, and \(z_1=\frac{\log M}{\delta _1}\).
Lemma 2.4
Assume MM holds. If \(s=s_0+\delta _2\) and \(\delta _2>0\), then \((\underline{C}_0, \underline{N}_0)(z)\) is a lower solution of system (1.5)–(1.6), where \(\underline{C}_0(z)\) is defined as (2.13), and \(\underline{N}_0(z)\) is the solution of N-equation of the system with \(C(z)=\underline{C}_0(z)\).
Proof
Substituting \(\underline{C}_0(z)\) into C-equation of (1.5), we obtain
Note that the second term is positive. Let M be large enough such that the second term plus the third one is positive. The first term is 0, and the last term is positive. Therefore, the proof is complete. \(\square \)
Lemma 2.5
Assume that MM holds. For \(s\ge 2\sqrt{1-\frac{\gamma }{k}}\), there exists a non-increasing and non-negative traveling wave solution for system (1.5)–(1.6).
Proof
We shall use the upper-lower solution method to prove it. Note that \(s\ge 2\sqrt{1-\frac{\gamma }{k}}>s_0\) as \(\lambda k-\gamma >0\). A lower solution is defined as (2.13). We only need to construct a suitable upper solution. Take \(\hat{\mu }=\frac{s-\sqrt{s^2-4(1-\frac{\gamma }{k})}}{2}\) satisfying the equation \(\hat{\mu }^2-s\hat{\mu }+1-\frac{\gamma }{k}=0\). We define \(\bar{C}_0\) as
where \(e^{-\hat{\mu } z_0}=1-\frac{\gamma }{k}\). Let \(\bar{N}_0(z)\) satisfy the second equation of (1.5), i.e., (2.3) with \(C(z)=\bar{C}_0(z)\). For \(z\le z_0\), it follows that
For \(z>z_0\), we get
Thus, \((\bar{C}_0,\bar{N}_0)(z)\) is the upper solution of (1.5)–(1.6). By Lemma 2.4 and the upper-lower solution method, there exists a monotone traveling wave of (1.5)–(1.6) for speed \(s\ge 2\sqrt{1-\frac{\gamma }{k}}\). Therefore, the proof is complete. \(\square \)
The following lemma provides a limiting argument.
Lemma 2.6
Assume that MM holds. If for all \(s=s_k, k=1,2, \cdots \), where \(\lim \limits _{k\rightarrow \infty }s_k=\bar{s}\), system (1.5)–(1.6) has a non-increasing traveling wave solution \((C_k, N_k)(z)\), where \(C_k(z)\sim A_k e^{-\mu _1(s_k) z}\) as \(z\rightarrow \infty \) with \(A_k>0\), then there exists a non-increasing traveling wave solution of (1.5)–(1.6) for \(s=\bar{s}\).
Proof
We shall use a limiting argument to prove it, see [6, 41]. Using Lemmas 2.3 and 2.5, we may assume that the sequence \(\{s_k\}\) is decreasing such that system (1.5)–(1.6) has a non-increasing traveling wave solution \((C_k, N_k)(z)\) with \(s=s_k\). Via shift, fix \(C_k(0)=\frac{1}{2}(1-\frac{\gamma }{k})\) for each k. Note that \(C_k(z)\) also satisfies the integral equation (2.8), and \(N_k(z)\) is defined as in (2.3) with \(C(z)=C_k(z)\). Then it follows
This means that \(C_k(z)\) is equicontinuous and uniformly bounded. By the Ascoli-Arzela theorem, there is a subsequence \(\{s_{k_j}\}\) such that \(C_{k_j}(z)\) converges uniformly on any compact interval and pointwise on \(\mathbb {R}\) to a limit, say \(C_{\bar{s}}(z)\). Let \(j \rightarrow \infty \). In terms of the dominated convergence theorem, \(C_{\bar{s}}(z)\) satisfies the integral equation (2.8), and \(N_{\bar{s}}(z)\) satisfies (2.3) with \(C(z)=C_{\bar{s}}(z)\) for \(s=\bar{s}\). Obviously, \((C_{\bar{s}}(z),N_{\bar{s}}(z))\) is a non-increasing solution of (1.5) with \(s=\bar{s}\) and \(C_{\bar{s}}(0)=\frac{1}{2}(1-\frac{\gamma }{k})\). Letting \(z\rightarrow \pm \infty \), and by the monotone convergence theorem, \(C_{\bar{s}}(\pm \infty )\) satisfy the integral equation (2.8). Due to the fact that \(1-\frac{\gamma }{k}\ge C_{\bar{s}}(-\infty )\ge C_{\bar{s}}(0)\ge C_{\bar{s}}(\infty ) \ge 0\), it follows that \(C_{\bar{s}}(-\infty )=1-\frac{\gamma }{k}\) and \(C_{\bar{s}}(\infty )=0\). Since \(N_{\bar{s}}(z)\) satisfies (2.3) with \(C(z)=C_{\bar{s}}(z)\), we get \(N_{\bar{s}}(-\infty )=\frac{1}{k}\) and \(N_{\bar{s}}(\infty )=0\). Therefore, the proof is complete. \(\square \)
Now we work on the proof of Theorem 2.1. By Lemma 2.5, monotone traveling wave of (1.5)–(1.6) exists when \(s=s_1\), where \(s_1\ge 2\sqrt{1-\frac{\gamma }{k}}>s_0\). If the traveling wave solution C(z) decays in \(\mu _2\) as \(z\rightarrow \infty \) when \(s=s_1\), then \(s_{\min }=s_1\) by result (ii) in Lemma 2.3. If the traveling wave solution C(z) decays in \(\mu _1\) when \(s=s_1\) as \(z\rightarrow \infty \), then for some small enough \(\delta \), monotone traveling wave of (1.5)–(1.6) exists for wave speed \(s=s_2=s_1-\delta \), by result (i) in Lemma 2.3. And so on, we can get a decreasing sequence \(\{s_k\}_{k=1}^\infty \) such that system (1.5)–(1.6) has the traveling wave solution \((C_k, N_k)\), where \(C_k=A_ke^{-\mu _1 z}\) as \(z\rightarrow \infty \). By Lemma 2.2 and the fact \(s_k\ge s_0\) for each k, the limit of this decreasing sequence exists. Let \(\bar{s}=\lim \limits _{k\rightarrow \infty }s_k\). In terms of Lemma 2.6, monotone traveling wave of system (1.5)–(1.6) exists for \(s=\bar{s}\). It follows that \(s_{\min }=\bar{s}\ge s_0\). Therefore, the proof of Theorem 2.1 is complete.
The following theorem gives a necessary and sufficient condition for the nonlinear selection of the minimal wave speed of system (1.5)–(1.6), which is a development of the abstract results in [31] to the system (1.2) with infinite equilibria.
Theorem 2.7
Assume that MM holds. The minimal wave speed \(s_{\min }\) of (1.5)–(1.6) is nonlinearly selected if and only if there exists \(s_2>s_0\) such that
with \(A_2>0\). Furthermore, \(s_2=s_{\min }\).
Proof
This result can be easily proved by Lemma 2.3. \(\square \)
The above result has an assumption on the wave solution which is unknown. To overcome this difficult, we shall give an easy-to-apply theorem for speed selection. We can use this general result to derive a series of explict conditions on speed selection by constructing various upper and lower solutions.
Theorem 2.8
(Linear, nonlinear selection and estimate of \(s_{\min }\)) Assume that MM holds.
(i). For \(s_1>s_0\), if there exists a monotonic lower solution \((\underline{C},\underline{N})(x-s_1t)\) of system (1.5)–(1.6) such that \(\underline{C}(z)\sim \underline{A} e^{-\mu _2 z}\) as \(z\rightarrow \infty \) with \(\underline{A}>0\), and \(\limsup _{z\rightarrow -\infty }\underline{C}(z)<1-\frac{\gamma }{k}\), then no traveling wave solution exists for \(s\in [s_0, s_1)\). Thus, we have \(s_{\min }>s_0\).
(ii). For \(s=s_0+\varepsilon \) where \(\varepsilon \) is any small positive number, if there exists a nonnegative and monotonic upper solution \((\overline{C},\overline{N})(x-st)\) of system (1.5)–(1.6) such that \(\overline{C}(z)\sim \overline{A} e^{-\mu _1 z}\) as \(z\rightarrow \infty \) with \(\overline{A}>0\), and \(\liminf _{z\rightarrow -\infty }\overline{C}(z)\ge 1-\frac{\gamma }{k}\), then we have \(s_{\min }=s_0\).
Proof
For part (i), we prove it by contradiction. For \(s\in (s_0, s_1)\), we assume there exists a monotone traveling wave solution \((C,N)(x-st)\) of (1.2) with the initial conditions
Note that \(\underline{C}(x)\le C(x)\) for \(x\in \mathbb {R}\) by shifting if necessary. According to equation (2.3), we have \((\underline{C},\underline{N})(x)\le (C,N)(x)\) for \(x\in \mathbb {R}\). By the comparison theorem, we get
Fix \(z^*=x-s_1t\) such that \(\underline{C}(z^*)>0\). Since
it follows that \(\underline{C}(z^*)\le 0\), which is a contradiction.
For part (ii), we know (2.13) is a lower solution when \(s=s_0+\varepsilon \) by Lemma 2.4. Let \(\varepsilon \rightarrow 0\). Our result holds by the upper-lower solution method. Thus, the proof is complete. \(\square \)
The following theorem gives a necessary and sufficient criterion to distinguish between linear and nonlinear selection in terms of the value of k.
Theorem 2.9
Assume that MM holds. For fixed \(\lambda \) and \(\gamma \), the minimal speed \(s_{\min }\) is non-decreasing with respect to k. Furthermore, there exists a finite value \(k^*\) such that \(s_{\min }=s_0\) for \(k \in [\frac{\gamma }{\lambda }, k^*]\), and \(s_{\min }>s_0\) for \(k>k^*\).
Proof
Let \(k_2>k_1\ge \frac{\gamma }{\lambda }\). By Theorem 2.1, then there exists a monotone traveling wave solution \(C_{k_2}(z)\) of system (2.4)–(2.5) with speed \(s=s_{\min }(k_2)\) for \(k=k_2\). Note that \(C_{k_2}(z)\) is an upper solution of the system for \(k=k_1\) in terms of the comparison theorem. A lower solution is defined as (2.13). Using the upper-lower solution method, monotone traveling wave solution of the system exists for \(k=k_1\) when \(s=s_{\min }(k_2)\), and thus \(s_{\min }(k_1)\le s_{\min }(k_2)\). Thus, \(s_{\min }\) is non-decreasing with respect to k.
Now we prove that there is a finite value of k so that transition of the speed selection is realized.
Claim: If k is sufficiently large, then the minimal wave speed is nonlinearly selected, that is, \(s_{\min }(k)>s_0\).
Define \(\underline{C}_M(z)\) as
where \(\epsilon <1-\frac{\gamma }{k}\) is small, and \(\underline{N}_M(z)=N(z)\) is defined by (2.3) with \(C(z)=\underline{C}_M(z)\). Substituting \(\underline{C}_M(z)\) into equation (2.4) gives
where \(y=\frac{1}{1+e^{\mu _2 z}}\) and \(\hat{M}=\frac{\lambda k \epsilon }{s \mu _2}\). Since k is sufficiently large, it follows that \(\hat{M}\) is large. Note that
By calculation, \(Y_1'(y)\ge 0\) for \(y\in [0,1]\), and thus we get \(Y_1(y)\ge Y_1(0)=0\). It follows that \(Y'(y)\ge 0\). For \(y\rightarrow 0\), we have
due to the fact that \(\hat{M}\) is sufficiently large, and \(\mu _2\sim \sqrt{1-\lambda }\) when \(s=s_0+\epsilon _1\) for small \(\epsilon _1\). Clearly, \(Y(y)\ge 0\). Therefore, \(\underline{C}_M''+s\underline{C}_M'+\underline{C}_M[1-\lambda -\underline{C}_M+(\lambda k-\gamma )\underline{N}_M]\ge 0\) for all \(z\in \mathbb {R}\). Thus, \(\underline{C}_M(z)\) is a lower solution of (2.4) when k is sufficiently large. By Theorem 2.8, the above claim is true.
Note that C-equation of (2.4) becomes the Fisher-KPP equation when \(k=\frac{\gamma }{\lambda }\). It gives \(s_{\min }=s_0\), which can be seen in [24, 25]. By using the fact \(s_{\min }\) is non-decreasing with respect to k and the above claim, then there exists finite \(k^*\) such that \(s_{\min }=s_0\) for \(k \in [\frac{\gamma }{\lambda }, k^*]\), and \(s_{\min }>s_0\) for \(k>k^*\). Therefore, the proof is complete. \(\square \)
By an analogous argument as in the proof of Theorem 2.9, we shall derive the following theorem for the monotonicity of \(s_{\min }\) with respect to \(\gamma \).
Theorem 2.10
Assume that MM holds. For fixed \(\lambda \) and k, \(s_{\min }\) is non-increasing with respect to \(\gamma \).
Proof
Let \(\gamma _1<\gamma _2\le \lambda k\). By Theorem 2.1, there exists a monotone traveling wave solution \(C_{\gamma _1}(x-s_{\min }(\gamma _1)t)\) satisfying system (2.4)–(2.5) with \(\gamma =\gamma _1\). Note that \(C_{\gamma _1}(x-s_{\min }(\gamma _1)t)\) is an upper solution of the system with \(\gamma =\gamma _2\). A lower solution is defined as in (2.13). Then there exists a traveling wave solution of the system for \(\gamma =\gamma _2\) when \(s=s_{\min }(\gamma _1)\). It follows that \(s_{\min }(\gamma _2)\le s_{\min }(\gamma _1)\). Therefore, \(s_{\min }\) is non-increasing with respect to \(\gamma \). \(\square \)
Next, we shall give some estimates about \(k^*\) based on Theorem 2.8.
Theorem 2.11
Assume that MM holds. If parameters \(\lambda \), \(\gamma \) and k satisfy
then \(s_{\min }=s_0\).
Proof
We can prove it by Theorem 2.8. Define a pair of continuous function \((\bar{C_1}, \bar{N_1})(z)\) as
where \(\eta _1=\frac{2(1-\lambda )}{(\lambda k-\gamma )(1-\frac{\gamma }{k})}>\frac{1}{k(1-\frac{\gamma }{k})}\) by (2.19), and \(\eta _1\bar{C}_1(z_2)=\frac{1}{k}\). Let \(s=s_0+\varepsilon _2\), where \( \varepsilon _2\) is sufficiently small. We have \(\mu _1\sim \sqrt{1-\lambda }\). It follows that
and
by using (2.19). Therefore, \((\bar{C_1}, \bar{N_1})(z)\) is an upper solution of (1.5)–(1.6). By Theorem 2.8, we have \(s_{\min }=s_0\) when (2.19) holds. The proof is complete. \(\square \)
Theorem 2.12
Assume that MM holds. If \(\lambda \), \(\gamma \) and k satisfy
then \(s_{\min }>s_0\).
Proof
We shall use Theorem 2.8 to prove this theorem. The key point is to find a suitable lower solution satisfying all conditions in Theorem 2.8 (i). Define a pair of continuous function \((\underline{C}_1, \underline{N}_1)(z)\) as
where \(0<\underline{k}_1<1-\frac{\gamma }{k}\). We need to prove \((\underline{C}_1, \underline{N}_1)(z)\) is the lower solution of system (1.5)–(1.6). According to (2.21), \(\underline{k}_1\) can be chosen such that
We have
and
by using (2.23), and \(\mu _2\sim \sqrt{1-\lambda }\) for \(s=s_0+\varepsilon _3\), where \(\varepsilon _3>0\) is small. Thus, \((\underline{C}_1, \underline{N}_1)(z)\) is a lower solution of (1.5)–(1.6). It follows that \(s_{\min }>s_0\) by Theorem 2.8. Thus, the proof is complete. \(\square \)
The following theorem gives details of the decay rate of the minimal traveling wave as k varies. We will show that the decay rate of the minimal traveling wave goes from \(ze^{-\mu _1(s_0) z}\) to \(e^{-\mu _1(s_0) z}\) as \(k\rightarrow k^*\) from below. Wu, Xiao and Zhou [51, Theorem 1.2 and Theorem 1.5] established a similar result for the scalar reaction-diffusion equations and the two-species Lotka-Volterra competition systems by constructing a very complex upper solution, which is relatively difficult to be applied to other models. For this model of precursor and differentiated cells, we develop a new technique to prove this decay behavior.
Theorem 2.13
Assume that MM holds. Let \(k^*\) be the turning point for the minimal speed selection, that is, \(s_{\min }=s_0\) for \(k \in [\frac{\gamma }{\lambda }, k^*]\), and \(s_{\min }>s_0\) for \(k>k^*\). Then the minimal traveling wave solution C(z) of system (2.4)–(2.5) satisfies:
-
(1)
if \(k\in [\frac{\gamma }{\lambda },k^*)\), then \(C(z)\sim Aze^{-\mu _1(s_0) z}\) as \(z\rightarrow \infty \), where \(A>0\);
-
(2)
if \(k=k^*\), then \(C(z)\sim Be^{-\mu _1(s_0) z}\) as \(z\rightarrow \infty \), where \(B>0\);
-
(3)
if \(k>k^*\), then \(C(z)\sim Be^{-\mu _2(s_{\min }) z}\) as \(z\rightarrow \infty \), where \(B>0\).
Proof
For \(k \in [\frac{\gamma }{\lambda }, k^*]\), we have \(s_{\min }=s_0\) by Theorem 2.9, and then
where \(A> 0\), or \(B>0\) if \(A=0\), see [4]. We first prove result (2) by using a similar method to Lemma 2.3 (i). Denote the minimal traveling wave solution C(z) by \(C^*(z)\) for \(k=k^*\). Assume \(C^*(z)\sim Aze^{-\mu _1(s_0) z}\) as \(z\rightarrow \infty \) with \(A>0\). Clearly, \(C^*(z)\) satisfies
where
Let \(k_\varepsilon =k^*+\varepsilon \), where \(\varepsilon \) is sufficiently small to be determined. Let \(C_\varepsilon (z)=C^*(z)+W_2(z)\), where \(W_2(z)\in B_0=\{u\in C(-\infty , \infty ), u(\pm \infty )=0\}\). If we can prove the existence of \(W_2\) such that \(C_\varepsilon (z)\) is a solution of (2.4) with \(k=k_\varepsilon \) for \(s=s_0\), then it contradicts the definition of \(k^*\), and then result (2) holds. Suppose that \(C_\varepsilon (z)\) is a solution of (2.4) with \(k=k_\varepsilon \) and \(s=s_0\). It means
By (2.25) and (2.26), \(W_2\) should satisfy
where
Therefore, for \(s=s_0\), we have
where \(T_1\) is defined in (2.8). Clearly, \(T_1(P_\varepsilon )\) is of \(O(\varepsilon )\) when \(\varepsilon \rightarrow 0\). Define
The linear operator \(T_2\) is compact and strongly positive, and it has a simple principle eigenvalue \(r=1\) with the associated positive eigenfunction as \(-{C^*}'\). In order to remove this eigenfunction from \(B_0\), we define the following weighted functional space
Since \(-{C^*}'\) is not in the space \(\mathcal {H}_1\), then \(T_2\) does not have eigenvalue \(\lambda =1\) for \(W_2\) in \(\mathcal {H}_1\), that is, \(I-T_2\) has a bounded inverse in \(\mathcal {H}_1\), where I is the identity operator. Then there exists a solution \(W_2\) of equation (2.28) for any \(\varepsilon \in [0, \varepsilon _0)\), where \(\varepsilon _0\) is a small positive number. It follows that there exists a \(\varepsilon _0\) so that the solution \(C_\varepsilon \) of (2.4)–(2.5) exists with \(s=s_0\) for \(k=k_\varepsilon =k^*+\varepsilon <k^*+\varepsilon _0 \), which contradicts the conclusion in Theorem 2.9. Therefore, result (2) is true.
Result (1) can be proved by a similar method as in [51, Theorem 1.2]. Assume that there exists \(k\in [\frac{\gamma }{\lambda }, k^*)\) such that the minimal traveling wave satisfies
By result (2), for \(k=k^*\), the minimal traveling wave \(C_{k^*}\) satisfies
When \(z\rightarrow -\infty \), we get
where \(\mu (k^*)>\mu (k)>0\). Then there exists an \(L>0\) such that \(C_{k^*}(z-L)>C_k(z)\) for all \(z\in \mathbb {R}\). Define
If there exists \(z_1\in \mathbb {R}\) such that \(C_{k^*}(z_1-L^*)=C_k(z_1)\), then by the strong maximum principle, \(C_{k^*}(z-L^*)=C_k(z)\) for all \(z\in \mathbb {R}\), which contradicts the fact that \(C_{k^*}(z-L^*)\) and \(C_k(z)\) satisfy different equations. Thus, \(C_{k^*}(z-L^*)>C_k(z)\) for all \(z\in \mathbb {R}\).
We then have the following claim.
Claim: \(\lim \limits _{z\rightarrow \infty } \frac{C_{k^*}(z-L^*)}{C_k(z)}=1\).
Assume \(\lim \limits _{z\rightarrow \infty } \frac{C_{k^*}(z-L^*)}{C_k(z)}>1\). By \(C_{k^*}(z-L^*)>C_k(z)\) for all \(z\in \mathbb {R}\), then there exists a sufficiently small \(\varepsilon _1>0\) such that \(C_{k^*}(z-(L^*-\varepsilon _1))\ge C_k(z)\) for \(z\in \mathbb {R}\), which contradicts the definition of \(L^*\). Therefore, the claim is true.
Thanks to the above claim, we have \(Be^{\mu _1(s_0)L^*}=B_1\). Let \(W(z)=C_{k^*}(z-L^*)-C_k(z) \). Then W(z) satisfies
Note that
where \(D\ge 0\), or \(E>0\) if \(D=0\). By (2.29), (2.30), and \(Be^{\mu _1(s_0)L^*}=B_1\), we know \(E=0\) and \(D=0\). This is a contradiction. Thus, result (1) holds.
Result (3) can be derived by Theorems 2.7 and 2.9. Therefore, the proof is complete. \(\square \)
3 Traveling Waves and Linear Selection in the Case MN
In this section, we consider system (1.2) in the case MN. Clearly, system (1.2) is non-monotonic, and the equilibrium \(e_\beta \) is stable, with \(e_0\) unstable.
Define \(\Omega =\{u:u \text { is a bounded and uniformly continuous function from }\mathbb {R}\text { to }\mathbb {R}^2\}\). Let \(\mu >0\) be a constant such that \(2\mu <-\beta _1\), where \(\beta _1\) is defined in (2.7). Further define a weighted functional space from \(\Omega \) as \(B_\mu \)=\(\{ u\in \Omega : \sup \limits _{z\in \mathbb {R}}|u(z)|e^{-\mu |z|}<\infty \}\), equipped with \(|u|_\mu =\sup \limits _{z\in \mathbb {R}}|u(z)|e^{-\mu |z|}\). Then \(B_\mu \) is a Banach space with the norm \(|\cdot |_\mu \).
We shall apply the method of upper and lower solutions to prove the existence of non-negative solutions of (1.5)–(1.6) under MN. The upper and lower solutions are crossly-defined as follows.
Definition 3.1
Assume that MN holds. Two pair of continuous functions \((\bar{C},\bar{N})\) and \((\underline{C}, \underline{N})\) which are twice differentiable on \(\mathbb {R}\) except at finite number of points \(z_i, i=1,..., n, \) and satisfies
for \(z\ne z_i\), with \(\bar{C}'(z_i^+)\le \bar{C}'(z_i^-)\) and \(\underline{C}'(z_i^-)\le \bar{C}'(z_i^+)\), are upper and lower solutions of (1.5)
For any \(s>s_0\), we shall construct
where parameters \(M, q, \eta \) satisfy
\(\mu _1\), \(\mu _2\) are defined in (2.2), \(Me^{-\mu _1 z_3}=\frac{1}{k}\), \(e^{-\mu _1 z_4}-qe^{-\eta \mu _1 z_4}=\epsilon \), and \(\epsilon \) is sufficiently small. Obviously \(\eta >1\).
We have the following lemma.
Lemma 3.2
Assume that MN holds. Then \((\bar{C},\bar{N})\) and \((\underline{C}, \underline{N})\), defined in (3.2), are upper and lower solutions of (1.5), respectively.
Proof
When \(\bar{C}=1-\lambda \), it follows that \(\bar{C}''+s\bar{C}'+\bar{C}[1-\lambda -\bar{C}+(\lambda k-\gamma )\underline{N}]=0\). When \(\bar{C}=(1-\lambda )e^{-\mu _1 z}\), this yields \( \bar{C}''+s\bar{C}'+\bar{C}[1-\lambda -\bar{C}+(\lambda k-\gamma )\underline{N}]=-\bar{C}^2\le 0\).
For \(\bar{N}=\frac{1}{k}\), we get \(s\bar{N}'+\lambda \bar{C}(1-k\bar{N})=0\). For \(\bar{N}=Me^{-\mu _1 z}\), that is, \(z\ge z_3\ge 0\) by (3.3), it implies \(\bar{C}=(1-\lambda )e^{-\mu _1 z}\). Thus,
thanks to the facts \(\bar{N}\in [0,\frac{1}{k}]\) and (3.3).
For \(\underline{C}=\epsilon \), then we have
For \(\underline{C}=e^{-\mu _1 z}-qe^{-\eta \mu _1 z}\ge \epsilon >0\), then \(z> z_3\ge 0\) by (3.3). It follows that \(\bar{N}=Me^{-\mu _1 z}\). Therefore, by (3.3), we have
Finally for \(\underline{N}=0\), we have \(s\underline{N}'+\lambda \underline{C}(1-k\underline{N})=\lambda \underline{C}\ge 0\).
Hence, \((\bar{C},\bar{N})\) and \((\underline{C}, \underline{N})\) are upper and lower solutions of (1.5) according to the Definition 3.1. \(\square \)
Lemma 3.3
Assume that MN holds. With the choice of upper and lower solutions \((\bar{C},\bar{N})\) and \((\underline{C}, \underline{N})\) as in (3.2) satisfying \((\bar{C}, \bar{N})\ge (\underline{C}, \underline{N})\),
it follows that (1.5) has a positive solution (C, N) such that
Proof
Define \(\Gamma =\{(C,N)\in \Omega : (\underline{C},\underline{N})\le (C, N)\le (\bar{C}, \bar{N})\}\). Note that \(\Gamma \) is nonempty, convex, bounded and closed. Let \(P_1(C, N)\) be defined as \(T_1\) in (2.8), and \(P_2(C)=\frac{1}{k}\big [1-e^{-k\int _{z}^{\infty }\frac{\lambda C(t)}{s}dt}\big ]\) as (2.3). We first want to prove \(P=(P_1, P_2): \Gamma \rightarrow \Gamma \), that is,
Indeed, it follows first that
and
Note that \(P_2(C)\) is non-decreasing with respect to C, F(C, N) is non-decreasing with respect to C, and F(C, N) is non-increasing with respect to N. The remainder of (3.5) can be proved in a similar way.
For any \(\Phi =(C_1, N_1)\in \Gamma \) and \(\Psi =(C_2, N_2)\in \Gamma \), we get
where \(R=\alpha +1-\lambda +(2+\gamma -\lambda k)\max \{\sup _{z\in \mathbb {R}}C_1(z), \sup _{z\in \mathbb {R}}C_2(z)\}\). It implies that
Thus, \(P_1(C,N)\) is continuous with respect to the decay norm \(|\cdot |_\mu \). By the expression of \(P_2(C)\), \(P_2\) is also continuous. By (3.5), it follows
and
This means that \(P_1(C_1, N_1)(z)\) and \(P_2(C_1, N_1)(z)\) are equicontinuous. Similar to the analysis of [26, Lemma 3.2] and [27, Lemma 3.6], there is a positive solution (C, N)(z) of (1.5) satisfying (3.4) by the Ascoli-Arzela theorem and the schauder fixed point theorem. Thus, the proof is complete. \(\square \)
Theorem 3.4
Assume that MN holds. For any \(s>s_0\), system (1.5)–(1.6) has a solution (C(z), N(z)) such that
Proof
The existence of (C(z), N(z)) satisfying (1.5) is guaranteed by Lemma 3.3. Due to \((C(z), N(z))\in \Gamma \) is a fixed point of the operator P, we have
where \(\underline{C}\) and \(\bar{N}\) are defined in (3.2). The expression (2.3) of N(z) implies \(N(z)>0\) for all \(z\in \mathbb {R}\). It only needs to prove the boundary condition (1.6). By (3.2), we have \(\lim \limits _{z\rightarrow \infty }(C, N)(z)=(0,0)\). Note that \(\liminf _{z\rightarrow -\infty }C(z)> 0\) because of the choice of \(\underline{C}\). Then by (2.3), we have \(\lim \limits _{z\rightarrow -\infty }N(z)=\frac{1}{k}\). Define
By taking lim sup on both sides of the integral equation (2.8), we obtain
Similarly, by taking lim inf of (2.8), we have
It follows from (3.9) and (3.10) that
Thus, \(C(-\infty )=1-\frac{\gamma }{k}\). Therefore, the proof is complete. \(\square \)
Theorem 3.5
Assume that MN holds. For \(s=s_0\), system (1.5)–(1.6) has a non-negative solution (C(z), N(z)). This means that the minimal wave speed of system (1.5)–(1.6) is linearly selected.
Proof
Let \(\{s^n\}_{n\in \mathbb {N}}\) be a decreasing sequence with \(s^n\rightarrow s_0\) as \(n\rightarrow \infty \), where \(s^0=2s_0\). By Theorem 3.4, system (1.5)–(1.6) has a positive solution \((C^n(z), N^n(z))\) for all \(s=s^n\), where \(N^n(z)\) satisfies (2.3) with \(C(z)=C^n(z)\). Choosing \(m>1\) so that we can fix \(C^n(0)=\frac{1}{2m}(1-\frac{\gamma }{k})\) for each n and \(C^n(z)<\frac{1}{2\,m}(1-\frac{\gamma }{k})\) for all \(z>0\) and \(n\in \mathbb {N}\). Note that
Thus, \(\{C^n(z)\}\) is equicontinuous. By the Ascoli-Arzela theorem, there is a subsequence \(\{s^{n_j}\}\) such that \(\{C^{n_j}(z)\}\) converges uniformly to a limit function, say \(C^0(z)\), satisfying the integral equation (2.8). Let \(N^0(z)\) be given by the right-hand side of (2.3) with \(C(z)=C^0(z)\) for \(s=s_0\). Therefore, the formula \((C^0, N^0)(z)\) satisfies (1.5) with \(s=s_0\),
and
It means that \(c(t, x)=C^0(x-s_0t)\) and \(n(t, x)=N^0(x-s_0t)\) satisfy
In view of \(N^0\le \frac{1}{k}\), thus, \(c(t, x)=C^0(x-s_0t)\) satisfies
By [26, Lemmas 2.2\(-\)2.4], for each fixed \(x\in \mathbb {R}\), we have
which implies \(\liminf _{z\rightarrow -\infty }C^0(z)\ge 1-\frac{\gamma }{k}\). Due to (2.3), it further follows that \(N^0(-\infty )=\frac{1}{k}\). By a similar argument in Theorem 3.4, we have \(C^0(-\infty )=1-\frac{\gamma }{k}\). Then it suffices to verify \(C^0(\infty )=0\). By contradiction, assume there exists \(\bar{\alpha }\in (0,\frac{1}{2m}(1-\frac{\gamma }{k}))\) such that \(\limsup _{z\rightarrow \infty }C^0(z)=\bar{\alpha }\). Then there exists a positive sequence \(\{z_i\}_{i\in \mathbb {N}}\) so that
Since \(C^0(z)\) is uniform continuous, there exists \(\bar{\delta }>0\) so that
Consider the initial value problem
where \(v_0(x)\) satisfies
-
(v1)
\(v_0(x)\) is bounded and uniformly continuous,
-
(v2)
\(v_0(x)=\bar{\alpha }/4\), \(x\in [-\bar{\delta }/2, \bar{\delta }/2]\),
-
(v3)
\(v_0(x)=0\) if \(|x|\ge \bar{\delta }\),
-
(v4)
\(v_0(x)\) is decreasing if \(x\in (\bar{\delta }/2, \bar{\delta })\), and increasing if \(x\in (-\bar{\delta }, -\bar{\delta }/2)\).
Note that (3.15) is a Fisher-KPP equation. It follows from [4, 24] that there is \(T>0\) so that
For any \(\bar{L}>0\), we can choose \(i_1<i_2\) such that
Let \(x=z_{i_2}\). By (3.16) and [26, Lemma 2.4], we know that \(c(t,x)=C^0(x-s_0t)\) satisfies
which contradicts (3.11). Thus, we have \(C^0(\infty )=0\). Therefore, the proof is complete. \(\square \)
4 Bistable Wave in the Case BM: Existence and Uniqueness
In this section, we consider system (1.2) under the condition BM. Clearly, \(e_\beta \) is stable, and \(e_0\) is non-asymptotically stable or strongly stable. Since \(e_0\) is neither isolated nor strongly-stable, the monotonic semiflow theorey in [12] can not be used directly to prove the existence of the bistable monotone traveling wave solution of (1.5)–(1.6). Here, we introduce a new idea to prove it, which may be applicable to other models with non-isolated equilibrium points.
Obviously(simply by the comparison principle) it can be seen from (1.5)–(1.6) (or (2.4)) that this model has no continuous and positive traveling wave with speed \(s\le 0\). Consider the wave speed \(s>0\) in the reaction term of (2.4) as a parameter. We would like to construct an auxiliary parabolic partial differential equation as follows
Note that (4.1) has two constant equilibria \(c=0\) and \(c=1-\frac{\gamma }{k}\). Due to the non-local term in the right side, its initial function needs to be restricted in a specific weighted functional space. For traveling waves to (4.1), we mean
where S(s) is the wave speed dependent on s. After a substitution, (4.1) becomes
subject to the boundary conditions
We will prove the existence and uniqueness of wavefront (S(s), U), with S(s) being non-increasing function of s.
Let \(\mathcal {C}=BC(\mathbb {R}, \mathbb {R})\) be the space of all bounded, continuous and \(\infty \)-integrable functions from \(\mathbb {R}\) to \(\mathbb {R}\), and \(\mathcal {M}\subset \mathcal {C}\) be the set of all continuous and non-increasing functions from \(\mathbb {R}\) to \(\mathbb {R}\). \(\mathcal {C}_+=\{ \varphi \in \mathcal {C}: \varphi (x) \ge 0, \forall x\in \mathbb {R} \}\). Define \(\mathcal {M}_\beta =\{\varphi \in \mathcal {M}: 0\le \varphi \le \beta \}\), where \(\beta =1-\frac{\gamma }{k}\).
Denote \(\{Q_t\}_{t\ge 0}\) as the solution semiflow associated with (4.1) on \(\mathcal {C}_+\). That is,
where \(c(t,x,\varphi )\) is the unique solution of (4.1) satisfying \(c(0,\cdot ,\varphi )=\varphi \). Let E be the set of all fixed points of \(Q_t\) for \(t>0\) restricted to \(\mathbb {R}\). Then \(E=\{0, \beta \}\). We use Q to denote \(Q_1\), and \(Q^n\) is the n-th iteration of Q.
Assume that \(\underline{\psi }\) and \(\bar{\psi }\) are nonincreasing functions in \(\mathcal {M}_\beta \) satisfying
where \(\tilde{\delta }>0\) is small, \(\tilde{\mu }\) is a positive constant, and \(x_1=-\frac{1}{\sqrt{\lambda -1}}\ln \beta >0\). Clearly, \(\underline{\psi }\le \bar{\psi }\).
Lemma 4.1
Assume that BM holds. There exists a positive number \(\tilde{S}>0\) such that for any \(S\ge \tilde{S}\), we have
Proof
Let \(\tilde{z}_1=x-St\). For \(\tilde{z}_1\le x_1\), we have \(\bar{\psi }(\tilde{z}_1)=\beta \), and then
For \(\tilde{z}_1>x_1\), we get \(\bar{\psi }(\tilde{z}_1)=e^{-\sqrt{\lambda -1} \tilde{z}_1}\). For any \(S\ge \tilde{S}_1\), where \(\tilde{S}_1\) satisfies \(-\sqrt{\lambda -1}\tilde{S}_1+\lambda -\frac{\gamma }{k}=0\), it gives
Therefore, \(Q[\bar{\psi }](x)\le \bar{\psi }(x-S)\).
In order to prove \(Q[\underline{\psi }](x)\ge \underline{\psi }(x+S)\), we let \(\tilde{z}_2=x+St\). Choose \(\tilde{\epsilon }>0\) such that
There exists \(M_0(s)\) so that \(k\int _{\tilde{z}_2}^{\infty }\frac{\lambda \underline{\psi }(\tau )}{s}d\tau >-\ln \tilde{\epsilon }\) when \(\tilde{z}_2<M_0(s)\). That is,
Take \(\tilde{\eta }:=\frac{\underline{\psi }(M_0(s))}{\beta -\tilde{\delta }}\in (0,1)\). There are two cases to analyze: \(M_0(s)<0\) and \(M_0(s)\ge 0\). We first assume \(M_0(s)<0\). For \(\tilde{z}_2<M_0(s)<0\), if \(S\ge \tilde{\mu }\), then by (4.8) and (4.9), we have
For \(\tilde{z}_2\in [M_0(s),0)\), we have \(\underline{\psi }(\tilde{z}_2)\in (0, \tilde{\eta }(\beta -\tilde{\delta })]\) and \(e^{\tilde{\mu } \tilde{z}_2}\in [1-\tilde{\eta },1)\). If \(S\ge \frac{\tilde{\mu }^2+\tilde{\eta }[\tilde{\eta }(\beta -\tilde{\delta })+\lambda -1]}{\tilde{\mu }(1-\tilde{\eta })}\), then
For \(\tilde{z}_2\ge 0\), we have \(\underline{\psi }(\tilde{z}_2)=0\), and thus
Assume \(M_0(s)\ge 0\). For \(\tilde{z}_2<0\le M_0(s)\), we can derive (4.10) by the same way. For \(\tilde{z}_2\ge 0\), (4.12) holds. Therefore, \(Q[\underline{\psi }](x)\ge \underline{\psi }(x+S)\) for all \(S\ge \tilde{S}_2:=\max \{\frac{\tilde{\mu }^2+\tilde{\eta }[\tilde{\eta }(\beta -\tilde{\delta })+\lambda -1]}{\tilde{\mu }(1-\tilde{\eta })}, \tilde{\mu } \}\). Let \(\tilde{S}=\max \{\tilde{S}_1, \tilde{S}_2\}\). Thus, the proof is complete. \(\square \)
This lemma implies that \( \bar{\psi }(x-St)\) and \(\underline{\psi }(x+St)\) form a pair of upper/lower solutions to the auxiliary equation (4.1) for large S.
For each n, make a shift to each upper and lower solutions and define
Obviously by way of the invariance of translation, both of them are still upper/lower solutions of Q,
Let \(\kappa _n:=(n+\tilde{S})/n\). Define \(A_{\xi }[\phi ](x)=\phi (\xi x)\) for all \(x\in \mathbb {R}\), \(\xi \in \mathbb {R}\) and \(\phi \in \mathcal {M}_{\beta } \).
Similar to the proof of [12, Lemma 3.3], we have the following lemma.
Lemma 4.2
Assume that BM holds. For each \(n\in \mathbb {N}\), \(G_n:=Q\circ A_{\kappa _n}\) has a fixed point \(\phi _n\) in \(\mathcal {M}_{\beta }\) such that \(\phi _n(x)\) is nonincreasing in x and \(\underline{\psi }_n\le \phi _n\le \bar{\psi }_n\).
Theorem 4.3
Assume that BM holds. There exists a \(S\in \mathbb {R}\) such that \(\{Q^n\}_{n\ge 1}\) admits a nonincreasing traveling wave connecting \(\beta \) to 0 with speed S.
Proof
Choose \(\tilde{M}>x_1>0\) such that \(e^{-\sqrt{\lambda -1}\tilde{M}}<\frac{1}{2}(\beta -\tilde{\delta })\), and it follows
Define \(b_n:=\sup \limits _{}\{x: \phi _n(x)\in [\frac{1}{2}(\beta -\tilde{\delta }),\beta ]\}\). In other word, \(b_n\) is a point so that \(\phi _n(b_n)=\frac{1}{2} (\beta -\tilde{\delta })\). Then \(-\frac{1}{\tilde{\mu }}\ln 2-(n+\tilde{S})\le b_n\le \tilde{M}-x_1+n+\tilde{S}\). Let \(\phi _{+,n}(x):=\phi _n(x+b_n)\), and we have
Due to the compactness of Q, there exist a subsequence (denoted by n), a nonincreasing function \(\phi _+\), and \(\xi _+\) such that
Define \(S_+:=\tilde{S}\xi _+.\) Observe that
holds uniformly for x in any bounded subset of \(\mathbb {R}\). For any \(x\in \mathbb {R}\), we have
Therefore, \(\phi _+(-\infty )\) and \(\phi _+(\infty )\) are fixed points of Q. Note that \(\frac{1}{2}(\beta -\tilde{\delta })\le \lim \limits _{n\rightarrow \infty }\phi _n(b_n)=\phi _+(0)<\beta \). It follows that \(\phi _+(-\infty )=\beta \) and \(\phi _+(\infty )=0\). Hence, the proof is complete. \(\square \)
Since the solution of (4.1) is continuous in its parameter s, it is easy to know that \(S_+\) is a continuous function of s. Returning to the equation (4.1) with \(S_+=S(s)\), we are ready to have the following theorem.
Theorem 4.4
Assume that BM holds. There exists \(S(s)\in \mathbb {R}\) and \(U\in \mathcal {M}_\beta \) connecting \(\beta \) to 0 such that \(Q_t[U](x)=U(x-S(s)t) \) for all \(x\in \mathbb {R}\), that is, (4.1) admits a non-increasing traveling wave \(U(x-S(s)t)\) connecting \(\beta \) to 0. Furthermore, this bistable traveling wave U(z) is strictly decreasing in z with \(U'(z)<0\).
Proof
We only prove \(U'(z)<0\) by a contradiction argument. Assume \(U'(z_0)=0\) for some \(z_0\in \mathbb {R}\). The strong maximum principle implies that \(U'(z)\equiv 0\) for \(z\in \mathbb {R}\). It contradicts the boundary condition (4.3). \(\square \)
In the following, we want to establish the uniqueness of the above traveling waves in an exponentially decay function space. We now use the bistable traveling wave U(z) to construct a pair of upper and lower solutions of (4.1). We first define two continuous functions
Here \(P^{\pm }>1\), and \(\mu >0\) is small to be determined. \(\eta _1\) and \(\eta _2\) are chosen so that the above two functions are continuous.
Lemma 4.5
Assume that BM holds. Define
Then there exists \(\sigma _1<0\), \(P^{\pm }>0\), \(\rho >0\) and \(\delta _0>0\) such that for any \(\xi _0\in \mathbb {R}\), \(\delta \in (0,\delta _0)\), and \(\mu =\sqrt{\delta }\), the formulas \(\phi ^{\pm }(z,t)\) are upper and lower solutions of (4.1) respectively. It further follows that \(\phi ^{-}(z,t)\le c(x,t)\le \phi ^{+}(z,t)\), if \(\phi ^{-}(x,0)\le c(x,0)\le \phi ^{+}(x,0)\).
Proof
We only prove \(\phi ^+(z,t)\) is an upper solution of (4.1), and the lower solution \(\phi ^-(z,t)\) can be verified by a similar argument. Let \(\xi =z+ \xi _0+ \sigma _1\delta (1-e^{-\rho t})\) and \(\eta =z+\xi _0\). We choose \(\delta \) and \(\rho \) that are small enough. Take \(M_1>0\) and sufficiently small \(\epsilon >0\) such that \(e^{-k\int _{\xi }^{\infty }\frac{\lambda U(\tau )}{s}d\tau }>1-\epsilon \) for \(\xi >M_1\) and \(U(M_1)=\mu ^2(1-\frac{\gamma }{k})\). Take \(M_2>0\) and sufficiently small \(\epsilon _1>0\) such that \(e^{-k\int _{\xi }^{\infty }\frac{\lambda U(\tau )}{s}d\tau }<\epsilon _1\) for \(\xi <-M_2\) and \(U(-M_2)=\theta _1(1-\frac{\gamma }{k})>\frac{1}{2}(1-\frac{\gamma }{k})\).
Let \(M>\max \{\eta _1, \eta _2, M_1, M_2\}\). Set
Substituting \(\phi ^+\) into (4.1), we get
Here we use the fact U is the biatable traveling wave of (4.1) and satisfies (4.2). In order to prove \(\phi ^+(z,t)\) is an upper solution of (4.1), we consier three cases:
Case (i): \(|\xi |\le M\). Accroding to (4.15), (4.16), and \(\delta \) is sufficiently small, we have
and
Then it gives
The last inequality sign in (4.17) holds by (4.15).
Case (ii): \(\xi >M\). Note that \(\xi >M_1\) and \(\xi >-\eta _1\). Then \(\eta >-\eta _1\) since \(\delta \) is sufficiently small. It means \(P_+(\eta )=e^{-\mu \eta }\). Accroding to (4.15), (4.16), \(\mu =\sqrt{\delta }\), and \(\delta \) is sufficiently small, we have
and
Then
Here \(\bar{\delta }=(\lambda -\frac{\gamma }{k})[1-(1-\epsilon )e^{-\frac{\sqrt{\delta }k\lambda }{s} e^{-\mu \eta }e^{-\rho t}}]\) and \(\mu \) are small enough since \(\delta \) and \(\epsilon \) are sufficiently small. Since \(\lambda >1\) and \(\rho \) small enough, then the last inequality in (4.18) holds.
Case (iii): \(\xi <-M\). Note that \(\xi <-M_2\) and \(\xi <-\eta _1\). Then \(\eta <-\eta _1\). Thus \(P(\eta )=P^+\). Accroding to (4.15), (4.16), and \(\delta \) is sufficiently small, we have
and
since \((\lambda -\frac{\gamma }{k})e^{-k\int _{\xi }^{\infty }\frac{\lambda U(\tau )}{s}d\tau }[1-e^{-k\int _{\eta }^{\infty }\frac{\lambda P_+(\tau )\delta e^{-\rho t}}{s}d\tau }] \bigg \}\rightarrow 0\).
Then equation (4.16) becomes
since \(\theta _1>\frac{1}{2}\) and \(\rho \) sufficiently small. Combining cases (i)–(iii), we have \(\phi ^+_{zz}+S(s)\phi ^+_{z}-\phi ^+_{t}+\phi ^+\big \{1-\lambda -\phi ^++(\lambda -\frac{\gamma }{k})[1-e^{-k\int _{z}^{\infty }\frac{\lambda \phi ^+(\tau ,t)}{s}d\tau }]\big \}\le 0\) for \(z\in \mathbb {R}\) and \(t\ge 0\). Therefore \(\phi ^+(z, t)\) is an upper solution of (4.1). \(\square \)
Next, we shall establish the uniqueness of the bistable traveling wave of system (4.1) by using Lemma 4.5.
Theorem 4.6
Assume that BM holds. If \(U^*(x-S^*(s)t)\) is a bistable traveling wave of system (4.1) connecting \(\beta \) to 0, then there exists \(z^*\in \mathbb {R}\) such that \(U^*(x-S^*(s)t)=U(x-S(s)t+z^*)\) and \(S^*(s)=S(s)\), where \(U(x-S(s)t)\) is the solution in Theorem 4.4.
Proof
There exist \(\xi _1\in \mathbb {R}\) and \(h\gg 1\) such that
since the decay rate \(\mu \) in \(P_+(x)\) and \(P_-(x)\) is sufficiently small. Then by Lemma 4.5 and the comparison theorem, we have
Fix \(\bar{z}=x-S^*(s)t\) such that \(U^*(\bar{z})>0\). If \(S^*(s)> S(s)\), then
It contradicts the fact \(U^*(\bar{z})>0\). Thus \(S^*(s)\le S(s)\). Similarly, by the left inequality in (4.20), we have \(S^*(s)\ge S(s)\). Therefore, \(S^*(s)= S(s)\).
Let \(t\rightarrow \infty \) in (4.20). We have
By using a similar method in [7] (see Step 2 on page 133), we can prove the wave profile is unique up to translation. \(\square \)
In order to prove the existence and uniqueness of bistable monotone traveling wave of (1.5)–(1.6) under BM, we need to show \(S(s)=s\) has only one positive root. Before proving this, we give the following critical lemma, which reveals the monotonicity of S(s) with respect to s.
Lemma 4.7
Assume that BM holds. The wave speed S(s) is non-increasing with respect to s in (4.2), that is, \(S(s_1)\ge S(s_2)\) if \(0<s_1\le s_2\).
Proof
Take \(0<s_1\le s_2\). To the contrary, assume \(S(s_1)<S(s_2)\). Let \(V_2(z)\) be the traveling wave with speed \(S(s_2)\), satisfying
Consider
and it has a solution
Let \(V_1(z)=V_1(x-S(s_1)t)=\bar{c}(t,x)\) satisfy
Note that the reaction term is non-increasing with respect to s. Thus, we have
Due to the fact that
where \(0<\zeta (S(s_2))<\zeta (S(s_1)), 0<\nu (S(s_1))<\nu (S(s_2))\), and \(b_i, i=2,3,4, 5,\) are positive constants, and by translation if necessary, we have \(V_2(x)\le V_1(x)\) for all \(x\in \mathbb {R}\). Using the comparison principle [14], we have
Fix \(z_1^*=x-S(s_2)t\) such that \(V_2(z_1^*)>0\). It follows that
which contradicts \(V_2(z_1^*)>0\). Therefore, \(S(s_1)\ge S(s_2)\). \(\square \)
Theorem 4.8
Assume that BM holds. There exists a unique monotone bistable traveling wave (s, C(z), N(z)), \(z=x-st\), of system (1.5)–(1.6), where s is positive.
Proof
Theorems 4.4 to 4.6 gives the existence and uniqueness of the monotone bistable traveling wave solution of (4.2)–(4.3). We also know that S(s) is nonincreasing function of s. To return to (1.5)–(1.6) for the existence of waves, we need to show that \(S(s)=s\) has a positive root. To this end, it suffices to show \(S(0_+)>0\). Let
Then (4.2) can be written as
Here we just use S(s, f) to indicate that the speed is dependent on the reaction term. Take a small \(\hat{\varepsilon }>0\) such that \(U(M_1)=\hat{\varepsilon }\) for some constant \(M_1\). Consider \(s\rightarrow 0\) in (4.25). Then there exists a sufficiently small \(\delta >0\) such that \(e^{-k\int _{z}^{\infty }\frac{\lambda U(\tau )}{s}d\tau }<\delta \) for \(z< M_1\). It follows that
Consider
The existence of U(z) in (4.27) connecting \(1-\frac{\gamma }{k}-\delta (\lambda -\frac{\gamma }{k})\) to 0 can be guaranteed by the classical work [14]. We multiply the left and right sides of (4.27) by \(U'\), and integrate both sides from \(-\infty \) to \(\infty \) with respect to z. It follows that the wave speed S(s, g) satisfies
Since \(\hat{\varepsilon }\) and \(\delta \) are small enough, we have
It means \(S(s,g)>0\). By (4.25), (4.26), (4.27), and using a similar argument in the proof of Lemma 4.7, we have \(S(s,f)\ge S(s,g)>0\) when \(s \rightarrow 0\). By Lemma 4.7, the equation \(S(s)=s\) has a unique positive solution. Thus, system (2.4)–(2.5) has a unique monotonic solution (s, C(z)), that is, there exists a unique monotone bistable traveling wave (s, C(z), N(z)) of system (1.5)–(1.6). It completes the proof. \(\square \)
5 Numerical Simulations
In this section, we will use MATLAB software to simulate our model in three cases MM-BM. The function “pdepe” is used to approximate the PDE system with Neumann boundary conditions. The numerical results show that the solution reaches its equilibria when |x| is large in a short time, which means the domain size has almost no impact on the simulation of the spreading speeds, as long as it is properly large. We shall compute the spreading speeds by using the Level Set Method. Let the following step functions be the initial data:
where parameters \(\lambda , \gamma \) and k are to be chosen.
Example 5.1
Let \(\lambda =0.5, \gamma =0.5, k=2\). The initial data are defined in (5.1).
In the case of this parameter choice, we have \(e_{\beta }=(0.75,0.5), e_0=(0,0)\). Note that MM holds. The detailed simulations can be seen in Fig. 1. The 3-D figures of c(t, x) and n(t, x) are shown in the right column. The left column is the same movement from the top view. These figures show that the solution propagates to the right with a constant speed, which is consistent with the result when \(e_{\beta } \) is stable and \(e_0\) is unstable under MM. We can use the level sets shown in Fig. 2 to calculate the numerical speeds. To compute the numerical moving speed \(s_c^*\) of c(t, x), we shall find the level set x(t) so that \(c(t,x(t))=\frac{1}{2}(\lambda -\frac{\gamma }{k})=0.375\) for different value of t. Similarly, we find x(t) so that \(n(t,x(t))=\frac{1}{2k}=0.25\), which can be used to compute the numerical moving speed \(s_n^*\) of n(t, x). By finding the difference in x coordinates in the level set and dividing by the corresponding time difference at each snapshot time, we will get the numerical calculation speed. Taking snapshots of c and n when \(t=350,360,370,...450\), respectively, shown in Fig. 2, we can derive the moving speeds at different times. When the speed difference among them is less than \(10^{-3}\), we stop the computation and take their value as the final result. By computation, we have \(s_c^*=1.4145\) and \(s_n^*=1.4140\). Note that the linear speed \(s_0=2\sqrt{1-\lambda }=1.4142\). Therefore, we obtain \(s_c^*\simeq s_n^*\simeq s_0\).

(Color online) Simulation of (c, n)(t, x) under the case MM. Here, \(\lambda =0.5, \gamma =0.5, k=2\). The left column are the 2-D figures from the top view. Figures in the right column are the 3-D movements of c and n as time t increases

(Color online) Snapshots of c(t, x) and n(t, x)’s movements. The graph on the left is c(t, x), and the right one is n(t, x) at different time \(t=350,360,370,...450\)

(Color online) Simulation of (c, n)(t, x) in the case MN. Here, \(\lambda =0.5, \gamma =1.5, k=2\). The left column are the 2-D figures from the top view. Figures in the right column are the 3-D movements of c and n as time t increases
Example 5.2
Let \(\lambda =0.5, \gamma =1.5, k=2\). The initial data are defined in (5.1).
In this case, we get \(e_{\beta }=(0.25,0.5), e_0=(0,0)\). Note that MN holds. The detailed simulations can be seen in Fig. 3. The 3-D figures of c(t, x) and n(t, x) are shown in the right column. The left column is the same movement from the top view. Clearly, the solution propagates to the right and stablizes into a traveling wave. After \(t=400\), we compute the numerical moving speeds \(s_c^*=1.4150\) and \(s_n^*=1.4160\) with a error in \(5\times 10^{-3}\). Note that \(s_0= 1.4142\). Therefore, we get \(s_c^*\simeq s_n^*\simeq s_0.\) Linear selection is realized in this case. We should mention that the solution c is not monotone in x and there is a hump appearing near the sharp change of solution value.
Example 5.3
Let \(\lambda =1.5, \gamma =0.5, k=2.\) The initial data are defined as in (5.1).
Note that \(e_{\beta }=(0.75,0.5), e_0=(0,0)\) and BM holds. The detailed simulations can be seen in Fig. 4. The 3-D figures of c(t, x) and n(t, x) are shown in the right column. The left column is the same movement from the top view. Under BM, \(e_{\beta }\) and \(e_0\) are both stable. From Fig. 4, the solution propagates to the right (that is \(s>0\)), which means that the cell population in the system is persistent when time t is large.

(Color online) Simulation of (c, n)(t, x) in the case BM. Here, \(\lambda =1.5, \gamma =0.5, k=2.\) The left column are the 2-D figures from the top view. Figures in the right column are the 3-D movements of c and n as time t increases

(Color online) In the left figure, we have \(\gamma =\lambda =0.5\). It shows the relashionship between the numerical moving speed \(s^*\) and k for fixed \(\gamma \) and \(\lambda \). The transition of speed selection in terms of \(k^*\) over \(\gamma \), when \(\lambda =0.6\), is in the right figure
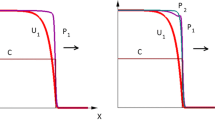
For the left picture in Fig. 5, we choose \(\gamma =\lambda =0.5\). We notice that the numerical speed \(s^*\) is non-decreasing with respect to k for fixed \(\gamma \) and \(\lambda \), see the dot-sign (red) curve. The straight (blue) line is the linear speed, and \(s_0=2\sqrt{1-\lambda }\approx 1.4142\). There exists a turning point \(k^*\) such that two curves coincide (with \(s^*=s_0\)) for \(k<k^*\), and \(s^*>s_0\) for \(k>k^*\). When \(\gamma =\lambda =0.5\), our numerical result shows \(k^*\approx 6.5\).
Finally, we want to provide the transition of speed selection in terms of two parameters k and \(\gamma \). There are three curves in the right picture of Fig. 5. The plus-sign (blue) curve is \(\gamma =k\). The values of \(\gamma \) and k should be chosen below this curve due to the condition \(\frac{\gamma }{k}<1\). The circle-sign (black) curve is \(\gamma =\lambda k=0.6k\) which corresponds to the KPP-Fisher case. If \(\gamma \) and k are chosen between the plus-sign (blue) curve and the circle-sign (black) curve, then we have \(\lambda k-\gamma <0\) (non-monotonic case) and the minimal speed is always the linear speed; When \(\gamma \) and k are chosen below the circular(black) curve, then \(\lambda k-\gamma >0\) (monotonic case). The dot-sign (red) curve shows the relationship \(k^*\) on \(\gamma \), where \(k^*\), defined in Theorem 2.9, is the transition (or turning point) for the minimal speed selection. If the parameter value is above the dot-sign (red) curve, the minimal wave speed is linearly selected; Otherwise, if the parameter value is below the dot-sign (red) curve, the minimal wave speed is nonlinearly selected.
6 Discussion
In this work, we investigated the existence of traveling waves and the minimal wave speed selection to a model of precursor and differentiated cells (1.2). Due to the non-isolated equilibrium \(e_0\), most current theories can not be directly applied to prove the existence of traveling waves. Analyzing the propagation dynamics of system (1.2) becomes tricky and challenging. Since model (1.2) has rich and complex propagation properties when the system parameters are in various value regions, we discussed it in three cases, MM-BM. Developing new ideas such as continuation via perturbation in a weighted functional space and construction of auxiliary parabolic non-local model, we successfully established the existence of traveling waves under monostable monotone, monostable non-monotone, and bistable monotone cases.
For the case MM, we also derived necessary and sufficient conditions to distinguish between linear and nonlinear selection of the minimal speed (see Theorems 2.7 and 2.9), and found the decay rate of the minimal traveling wave as \(z\rightarrow \infty \) in terms of the parameter of k (see Theorem 2.13). Here, Theorems 2.7 and 2.8 are a development of the abstract results of speed selection in [31] to this system with infinite equlibria. We proved the existence of the transition point \(k^*\) for the minimal speed selection when \(\lambda \) and \(\gamma \) are fixed. This result can also be seen in the picture of Fig. 5. Two explicit estimates about \(k^*\)(see Theorems 2.11 and 2.12) were provided. For the case MN, we proved that the minimal wave speed is always linearly selected without any extra requirements on system parameters. For the case BM, we showed the existence and uniqueness of the bistable wavefront (see Theorems 4.6 and 4.8), with a positive wave speed.
Back to the original system (1.1), the parameter \(k=\frac{\rho _1}{\rho _2}\) is the ratio of the carrying capacities of the precursor and differentiated cell populations. In view of Theorem 2.9, the spreading speed becomes faster when the carrying capacitiy \( \rho _1\) of the precursor cell population becomes bigger, and when the carrying capacitiy \( \rho _2\) of the differentiated cell population becomes smaller. This is in agreement with biological interpretation. Otherwise, the spreading speed is slower.
Our system (1.2) is closely related, but different from the following model with Belousov–Zhabotinsky reaction [17, 22, 23, 36, 37, 43, 44]
which is always monotonic, while system (1.2) exhibits the so-called non-monotonic dynamics in some parameter region. We shall show the novelty of our results in comparison to previous works through the following items.
-
1.
Gibbs [17] studied the existence of the traveling wave to the system (6.1) with \(D_u=1\) and \(D_v=0\). Note that letting \(\gamma =0\), our system (1.2) can be changed to (6.1) by setting \(D_u=1\) and \(D_v=0\). This means the model in [17] is a special case of our system (1.2). Furthermore, determining the value of the minimal wave speed \(s_{\min }\) is a crucial and difficult problem, which has not been touched in [17]. In fact, there is limited research involving this problem of the system (6.1) with \(D_u=1\) and \(D_v=0\). By letting \(\gamma =0\), our results (Theorems 2.7–2.9 and 2.11–2.12) can give novel estimates for \(s_{\min }\) of this system.
-
2.
The novel ideas we developed here to prove the existence of the traveling wave for both monostable and bistable cases can also be extended and applied to various new systems, especially high dimensional systems with non-isolated equilibrium points and systems with non-local term. For example, if the diffusion rate in n-equation to system (1.1) is non-zero, our method still works by defining an implicit operator for the solution n in n-equation and transforming the original system to a non-local equation. However, the shooting method used in [17, 22, 23] is not suitable for high dimensional system or the system with non-local term. The regular super-solutions method developed in [43, 44] may not be applied to our degenerate system (1.2), and it is also challenging to apply it to other more complex new systems due to the need to construct a suitable upper solution and to prove the boundary conditions at infinity.
-
3.
Hou[18] studied the special case \(\gamma =0\) of system (1.2), which can be transformed into system (6.1) with \(D_u=1\) and \(D_v=0\). The author focused exclusively on the monostable case and provided a sufficient condition for the linear selection, outlined as:
$$\begin{aligned} 0<\lambda <\frac{2}{k+2+\sqrt{2}k}. \end{aligned}$$(6.2)By Theorem 2.11, we have
$$\begin{aligned} 0<\lambda <\frac{2}{k+2} \end{aligned}$$(6.3)for the linear selection when \(\gamma =0\) and \(\lambda <2/3\). Thus, in this case, our linear selection condition (6.3) is better than (6.2) in [18].
-
4.
The exact value of the minimal wave speed \(s_{\min }\) for the system (6.1) with \(D_u=D_v=1\) or the delayed Belousov–Zhabotinsky reaction model [43] cannot be worked out[43, 44]. Our methods in Theorems 2.7–2.9 and 2.11–2.12 can be applied to these two systems to get new bound estimates for \(s_{\min }\).
Data Availability
No datasets were generated or analysed during the current study.
References
Alhasanat, A., Ou, C.: Minimal-speed selection of traveling waves to the Lotka–Volterra competition model. J. Differ. Equ. 266, 7357–7378 (2019)
Alhasanat, A., Ou, C.: On a conjecture raised by Yuzo Hosono. J. Dyn. Differ. Equ. 31, 287–304 (2019)
Alhasanat, A., Ou, C.: On the conjecture for the pushed wavefront to the diffusive Lotka–Volterra competition model. J. Math. Biol. 80, 1413–1422 (2020)
Aronson, D.G., Weinberger, H.F.: Multidimensional nonlinear diffusion arising in population genetics. Adv. Math. 30, 33–76 (1978)
Bates, P.W., Chen, X., Chmaj, A.J.J.: Traveling waves of bistable dynamics on a lattice. SIAM J. Math. Anal. 35, 520–546 (2003)
Brown, K.J., Carr, J.: Deterministic epidemic waves of critical velocity. Math. Proc. Camb. Philos. Soc. 81, 431–433 (1977)
Chen, X.: Existence, uniqueness, and asymptotic stability of traveling waves in nonlocal evolution equations. Adv. Differ. Equ. 2, 125–160 (1997)
Denman, P.K., McElwain, D.L.S., Norbury, J.: Analysis of travelling waves associated with the modelling of aerosolised skin grafts. Bull. Math. Biol. 69, 495–523 (2007)
Diekmann, O.: Thresholds and travelling waves for the geographical spread of infection. J. Math. Biol. 6, 109–130 (1978)
Dunbar, S.R.: Traveling waves in diffusive predator-prey equations: periodic orbits and point-to-periodic heteroclinic orbits. SIAM J. Appl. Math. 46, 1057–1078 (1986)
Fang, J., Zhao, X.-Q.: Traveling waves for monotone semiflows with weak compactness. SIAM J. Math. Anal. 46, 3678–3704 (2014)
Fang, J., Zhao, X.-Q.: Bistable traveling waves for monotone semiflows with applications. J. Eur. Math. Soc. (JEMS) 17, 2243–2288 (2015)
Farlie, P.G., McKeown, S.J., Newgreen, D.F.: The neural crest: basic biology and clinical relationships in the craniofacial and enteric nervous systems. Birth Defects Res. (Part C) 72, 173–189 (2004)
Fife, P.C.: Mathematical Aspects of Reacting and Diffusing Systems. Springer, Berlin (1979)
Fisher, R.A.: The wave of advance of advantageous genes. Ann. Eugen. 7, 355–369 (1937)
Gardner, R., Smoller, J.A.: The existence of periodic travelling waves for singularly perturbed predator-prey equations via the Conley index. J. Differ. Equ. 47, 133–161 (1983)
Gibbs, R.G.: Traveling waves in the Belousov–Zhabotinskii reaction. SIAM J. Appl. Math. 38, 422–444 (1980)
Hou, X.: Analysis of a model arising from invasion by precursor and differentiated cells. Int. J. Differ. Equ. (2013)
Huang, W.: Traveling wave solutions for a class of predator-prey systems. J. Dyn. Differ. Equ. 24, 633–644 (2012)
Huang, Z., Ou, C.: Speed selection for traveling waves of a reaction–diffusion–advection equation in a cylinder. Phys. D 402, 132–225 (2020)
Huang, Z., Ou, C.: Speed determinacy of traveling waves to a stream-population model with Allee effect. SIAM J. Appl. Math. 80, 1820–1840 (2020)
Kanel, Ya.. I.: Existence of a traveling-wave solution of a Belousov–Zhabotinskii system. Differ. Equ. 26, 652–669 (1990)
Kanel, Ya.. I.: Existence of a traveling-wave type solutions for the Belousov–Zhabotinskii system of equations II. Sib. Math. J. 32, 390–400 (1991)
Kolmogoroff, A.N., Petrovsky, I.G., Piscounoff, N.S.: Study of the diffusion equation with growth of the quantity of matter and its application to a biology problem. Bull. Univ. Moscow Ser. Int. Sec. A 1, 1–25 (1937)
Liang, X., Zhao, X.-Q.: Asymptotic speeds of spread and traveling waves for monotone semiflows with applications. Commun. Pure Appl. Math. 60, 1–40 (2007)
Lin, G.: Invasion traveling wave solutions of a predator-prey system. Nonlinear Anal. 96, 47–58 (2014)
Li, W.-T., Lin, G., Ruan, S.: Existence of travelling wave solutions in delayed reaction–diffusion systems with applications to diffusion-competition systems. Nonlinearity 19, 1253–1273 (2006)
Liu, X., Ouyang, Z., Huang, Z., Ou, C.: Spreading speed of the periodic Lotka–Volterra competition model. J. Differ. Equ. 275, 533–553 (2021)
Lucia, M., Muratov, B.C., Novaga, M.: Linear vs. nonlinear selection for the propagation speed of the solutions of scalar reaction–diffusion equations invading an unstable equilibrium. Commun. Pure Appl. Math. 57, 616–636 (2004)
Ma, M., Huang, Z., Ou, C.: Speed of the traveling wave for the bistable Lotka–Volterra competition model. Nonlinearity 32, 3143–3162 (2019)
Ma, M., Ou, C.: Linear and nonlinear speed selection for mono-stable wave propagations. SIAM J. Math. Anal. 51, 321–345 (2019)
Ma, M., Yue, J., Ou, C.: Propagation direction of the bistable travelling wavefront for delayed non-local reaction diffusion equations. Proc. A. 475, 10 (2019)
Ma, M., Ou, C.: The minimal wave speed of a general reaction–diffusion equation with nonlinear advection. Z. Angew. Math. Phys. 72, 14 (2021)
Ma, M., Ou, C.: Bistable wave-speed for monotone semiflows with applications. J. Differ. Equ. 323, 253–279 (2022)
Ma, M., Zhang, Q., Yue, J., Ou, C.: Bistable wave speed of the Lotka–Volterra competition model. J. Biol. Dyn. 14, 608–620 (2020)
Murray, J.D.: On traveling wave solutions in a model for Belousov–Zhabotinskii reaction. J. Theor. Biol. 56, 329–353 (1976)
Murray, J.D.: Lectures on Nonlinear Differential Equations. Models in Biology. Clarendon Press, Oxford (1977)
Newgreen, D., Young, H.M.: Enteric nervous system: development and developmental disturbances-part 2. Pediatr. Dev. Pathol. 5, 329–349 (2002)
Pan, C., Wang, H., Ou, C.: Invasive speed for a competition–diffusion system with three species. Discrete Contin. Dyn. Syst. Ser. B 27, 3515–3532 (2022)
Simpson, M.J., Landman, K.A., Hughes, B.D., Newgreen, D.F.: Looking inside an invasion wave of cells using continuum models: proliferation is the key. J. Theory Biol. 243(3), 343–60 (2006)
Thieme, H., Zhao, X.-Q.: Asymptotic speeds of spread and traveling waves for integral equations and delayed reaction–diffusion models. J. Differ. Equ. 195, 430–470 (2003)
Trewenack, A.J., Landman, K.A.: A traveling wave model for invasion by precursor and differentiated cells. Bull. Math. Biol. 71, 291–317 (2009)
Trofimchuk, E., Pinto, M., Trofimchuk, S.: Traveling waves for a model of the Belousov–Zhabotinsky reaction. J. Differ. Equ. 254, 3690–3714 (2013)
Trofimchuk, E., Pinto, M., Trofimchuk, S.: On the minimal speed of front propagation in a model of the Belousov–Zhabotinskii reaction. Discrete Contin. Dyn. Syst. Ser. B 19, 1769–1781 (2014)
Volpert, A.I., Volpert, V.A., Volpert, V.A.: Traveling wave solutions of parabolic systems. Am. Math. Soc. 140 (1994)
Wang, H., Huang, Z., Ou, C.: Speed selection for the wavefronts of the lattice Lotka–Volterra competition system. J. Differ. Equ. 268, 3880–3902 (2020)
Wang, H., Ou, C.: Propagation speed of the bistable traveling wave to the Lotka–Volterra competition system in a periodic habitat. J. Nonlinear Sci. 30, 3129–3159 (2020)
Wang, H., Ou, C.: Propagation direction of the traveling wave for the Lotka–Volterra competitive lattice system. J. Dyn. Differ. Equ. 33, 1153–1174 (2021)
Wang, H., Wang, H., Ou, C.: Spreading dynamics of a Lotka–Volterra competition model in periodic habitats. J. Differ. Equ. 270, 664–693 (2021)
Weinberger, H.F., Lewis, M.A., Li, B.: Analysis of linear determinacy for spread in cooperative models. J. Math. Biol. 45, 183–218 (2002)
Wu, C.H., Xiao, D., Zhou, M.: Linear vs. nonlinear speed selection of the front propagation into unstable states arXiv:2207.03371 (2022)
Author information
Authors and Affiliations
Contributions
C. Ou proposed the project. After long period of discussion of each other, Yuanxi came up with an intial version. Both Yue and Ou worked on the revision mutiple times for the completion.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
The work of this author was supported by the NSERC Discovery Grant(RGPIN03842-2022), This paper is in memory of Prof. Genevi\(\grave{e}\)ve Raugel.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Yue, Y., Ou, C. Traveling Wavefronts to a Model of Precursor and Differentiated Cells: Impacting Parameter-Structure Transition from Monostable to Bistable, and from Monotone to Non-monotone. J Dyn Diff Equat (2024). https://doi.org/10.1007/s10884-024-10384-5
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10884-024-10384-5