
Abstract
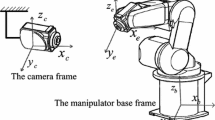
This article addresses the visual servoing of a rigid robotic manipulator equipped with a binocular vision system in eye-to-hand configuration. The control goal is to move the robot end-effector to a visually determined target position precisely without knowing the precise camera model. Many vision-based robotic positioning systems have been successfully implemented and validated by supporting experimental results. Nevertheless, this research aims at providing stability analysis for a class of robotic set-point control systems employing image-based feedback laws. Specifically, by exploring epipolar geometry of the binocular vision system, a binocular visual constraint is found to assist in establishing stability property of the feedback system. Any three-degree-of-freedom positioning task, if satisfying appropriate conditions with the image-based encoding approach, can be encoded in such a way that the encoded error, when driven to zero, implies that the original task has been accomplished with precision. The corresponding image-based control law is proposed to drive the encoded error to zero. The overall closed-loop system is exponentially stable provided that the binocular model imprecision is small.
Article PDF
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
References
Shirai, Y., Inoue, H.: Guiding a robot by visual feedback in assembling tasks. Pattern Recogn. 5, 99–108 (1973)
Hill, J., Park, W.T.: Real time control of a robot with a mobile camera. In: Proc. of the 9th ISIR, pp. 233–246, (March 1979)
Hutchinson, S.A., Hager, G.D., Corke, P.I.: A tutorial on visual servo control. IEEE Trans. Robot. Autom. 12(5), 651–670 (October 1996)
Hager, G.D., Chang, W.-C., Stephen Morse, A.: Robot hand-eye coordination based on stereo vision. IEEE Control Syst. Mag. 15(1), 30–39 (February 1995)
Colombo, C., Allotta, B.: Image-based robot task planning and control using a compact visual representation. IEEE Trans. Syst. Man. Cybern. 29(1), 92–100 (January 1999)
Krupa, A., Gangloff, J., Doignon, C., de Mathelin, M.F., Morel, G., Leroy, J., Soler, L., Marescaux, J.: Autonomous 3-d positioning of surgical instruments in robotized laparoscopic surgery using visual servoing. IEEE Trans. Robot. Autom. 19(5), 842–853 (October 2003)
Backes, P., Diaz-Calderon, A., Robinson, M., Bajracharya, M., Helmick, D.: Automated rover positioning and instrument placement. In: Proc. of the 2005 IEEE Conference on Aerospace, Big Sky, MT, pp. 60–71. IEEE, Los Alamitos, CA (March 2005)
Kofman, J., Wu, X., Luu, T.J., Verma, S.: Teleoperation of a robot manipulator using a vision-based human!vrobot interface. IEEE Trans. Ind. Electron. 52(5), 1206–1219 (October 2005)
Chang, W.-C.: Hybrid force and vision-based contour following of planar robots. J. Intell. Robot. Syst. 47(3), 215–237 (November 2006)
Wijesoma, S.W., Wolfe, D.F.H., Richards, R.J.: Eye-to-hand coordination for vision-guided robot control applications. Int. J. Rob. Res. 12(1), 65–78 (February 1993)
Hager, G.D.: Calibration-free visual control using projective invariance. In: Proc. ICCV, pp. 1009–1015 (1995)
Kelly, R.: Robust asymptotically stable visual servoing of planar robots. IEEE Trans. Robot. Autom. 12(5), 759–766 (October 1996)
Hager, G.D.: A modular system for robust positioning using feedback from stereo vision. IEEE Trans. Robot. Autom. 13(4), 582–595 (August 1997)
Samson, C., Le Borgne, M., Espiau, B.: Robot control: the task function approach. In: The Oxford Engineering Science Series, no. 22. Clarendon Press, Oxford (1991)
Rizzi, A.A.: Dexterous robot manipulation. PhD thesis, Yale University (November 1995)
Chang, W.-C.: Vision-based control of uncertain systems. PhD thesis, Yale University, New Haven, CT (December 1997)
Chang, W.-C., Hespanha, J.P., Morse, A.S., Hager, G.D.: Task re-encoding in vision-based control systems. In: Proc. of the 1997 Conference on Decision and Control, San Diego, CA, vol. 1, pp. 48–53. IEEE (December 1997)
Chang, W.-C., Morse, A.S.: Six degree-of-freedom task encoding in vision-based control systems. In: Proc. of the 14th World Congress of IFAC, Beijing, China, vol. B, pp. 311–316. International Federation of Automatic Control (July 1999)
Hespanha, J.P., Dodds, Z., Hager, G.D., Morse, A.S.: What tasks can be performed with an uncalibrated stereo vision system? Int. J. Comput. Vis. 35(1), 65–85 (1999)
Weiss, L.E., Sanderson, A.C., Neuman, C.P.: Dynamic sensor-based control of robots with visual feedback. IEEE J. Robot. Autom. RA-3(5), 404–417 (October 1987)
Feddema, J.T., Mitchell, O.: Vision-guided servoing with feature-based trajectory generation. IEEE Trans. Robot. Autom. 5(5), 691–700 (October 1989)
Skaar, S.B., Brockman, W.H., Jang, W.S.: Three-dimensional camera space manipulation. Int. J. Rob. Res. 9(4), 22–39 (August 1990)
Hashimoto, K., Kimoto, T., Ebine, T., Kimura, H.: Manipulator control with image-based visual servo. In: Proc. IEEE Int’l Conf. on Robotics and Automation, pp. 2267–2272 (April 1991)
Papanikolopoulos, N.P., Khosla, P.K., Kanade, T.: Visual tracking of a moving target by a camera mounted on a robot: a combination of control and vision. IEEE Trans. Robot. Autom. 9(1), 14–35 (February 1993)
Castaño, A., Hutchinson, S.A.: Visual compliance: task-directed visual servo control. IEEE Trans. Robot. Autom. 10(3), 334–342 (June 1994)
Horn, B.K.P.: Robot Vision. The MIT Electrical Engineering and Computer Science Series, 8th edn. McGraw-Hill, New York (1986)
Faugeras, O.: Three-Dimensional Computer Vision: A Geometric Viewpoint. MIT Press, Cambridge, MA (1993)
Zhang, Z., Luong, Q.-T., Faugeras, O.: Motion of an uncalibrated stereo rig: self-calibration and metric reconstruction. IEEE Trans. Automat. Contr. 12(1), 103–113 (February 1996)
Sontag, E.D.: Mathematical control theory. In: Texts in Applied Mathematics, vol. 6. Springer, Berlin Heidelberg New York (1990)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Chang, WC. Precise Positioning of Binocular Eye-to-Hand Robotic Manipulators. J Intell Robot Syst 49, 219–236 (2007). https://doi.org/10.1007/s10846-007-9135-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10846-007-9135-z