
Abstract
Recent literature about life-cycle models for earthquake resistant structures considers that damage accumulation and failure are possibly due to subsequent shocks occurring during the time period of interest. In fact, most of these models only consider the effect of mainshocks. On the other hand, it is well known that earthquakes occur in clusters in which the mainshock represents only the principal (e.g., prominent magnitude) event. Because there is a chance that aftershocks can also cause deterioration of structural conditions, it may be appropriate to include this effect in the life-cycle assessment. Recently, stochastic processes describing the occurrences of aftershocks and their effect on cumulative structural damage have been formalized. These can be employed to develop stochastic damage accumulation models for earthquake resistant structures, accounting for the cluster effect. In the paper, such a model is formulated with reference to simple elastic-perfectly-plastic single degree of freedom systems. Temporal distribution of mainshocks is modeled via a homogeneous Poisson process. Occurrence of aftershocks is modeled by means of non-homogeneous Poisson processes conditional to the characteristics of the triggering mainshock. Approximate closed-form solutions are derived for the reliability assessment under the two hypotheses that total damages produced by events pertaining to different clusters can be assumed to be independent and identically distributed gamma or inverse-Gaussian random variables. An application illustrates the implications of the model on the life-cycle assessment when compared to the case where the effect of damaging aftershocks is ignored.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Life-cycle models for structures require accounting for the degradation over time of structural performance. Usually, two categories of phenomena which may lead to damage accumulation are identified: (1) continuous deterioration of material characteristics (or aging), and (2) accumulation of damage because of repeated overloading due to earthquake shocks (e.g., Sanchez-Silva et al. 2011). In a probabilistic framework, the former is likely to be represented by a process in which damage accumulates continuously over time, while the latter may be interpreted as damage accumulating due to shocks, which can be treated as instantaneous when compared to the life-cycle of the structure.
The current best practice with respect to long-term seismic risk analysis of structures is certainly represented by the performance-based earthquake engineering framework (or PBEE; e.g., Cornell and Krawinkler 2000). PBEE conveniently splits structural assessment into sub-problems that can be more easily addressed, yet providing the desired result if combined: hazard, vulnerability, and loss (or exposure, that is the value of the elements at risk).
Classical probabilistic seismic hazard analysis (PSHA; e.g., McGuire 2004) usually makes recourse to the homogeneous Poisson process (HPP) in order to model the temporal distribution of seismic shocks at the earthquake source and at the construction site of interest. A memory-less model is also adopted to account for the spatial distribution of the earthquakes, that is, the location of past events does not affect the probability of future locations. One of the main limitations of this approach is that it is used to account for the occurrence of mainshocks only. In fact, earthquakes typically occur in clusters, in which a mainshock is followed by aftershocks, whose spatial and temporal distribution depends on the characteristics of the triggering mainshock (foreshocks are neglected in the following as they are usually very small in number; Yeo and Cornell 2009a). In a context where structural damage accumulation is accounted for, aftershocks may have a non-negligible effect on the life-cycle. Unfortunately, classical PSHA, because of both the use of the HPP and the model adopted for the spatial distribution of mainshocks, is not suitable to model events that are clustered in time and space.
Stochastic modeling of structures cumulating damage due to mainshock-aftershock seismic sequences is the issue addressed in the present study, and builds on recent results of the authors. Indeed, in Iervolino et al. (2013) a model for life cycle assessment of structures subjected to both earthquake damage accumulation and aging was developed. It led to a closed-form for the reliability assessment when occurrence of seismic shocks is according to a HPP. On the other hand, in Iervolino et al. (2014a) short-term seismic risk assessment of structures, which have experienced a mainshock (i.e., during aftershock sequences), was also developed. This model, considers a similar vulnerability model as in Iervolino et al. (2013), yet it is based on aftershock probabilistic seismic hazard analysis (or APSHA; Yeo and Cornell 2009a), in which earthquake occurrence is described by a non-homogeneous Poisson process (NHPP). Finally, in Iervolino et al. (2014b) mainshock HPP and aftershock NHPP were combined to develop a long-term PSHA model, which accounts also for aftershocks along with mainshocks. The present study derives a closed-form life-cycle assessment model, accounting for the effects of mainshocks and aftershocks (see also Yeo and Cornell 2009b).
In the study, earthquake clusters are considered instantaneous with respect to structural life; therefore, seismic events are described by a marked (or reward; Ross 1996) point process, where each event is represented by its occurrence time (i.e., the occurrence time of the triggering mainshock) and damage that it produces. The occurrence of earthquake clusters is modeled via the same HPP considered for the mainshocks (Boyd 2012), while the random occurrence of aftershocks is represented, as mentioned, by means of a (conditional) NHPP. From the structural vulnerability point of view, it is considered that degradation during seismic clusters can eventually lead to failure.
The main hypotheses of the model are that increments of damage accumulated over different seismic clusters are independent and identically distributed (i.i.d.) random variables (RVs), which are also independent of the process underlying cluster occurrence. It is clear that the principal reason for these assumptions is analytical convenience (to follow). Nevertheless, in the case of the considered application, they are less restrictive than they may appear; as a matter of fact, as briefly discussed in Sect. 3, they are verified when energy-based damage indices are used in conjunction with the relatively simple (yet widely applicable in earthquake engineering) elastic-perfectly-plastic (EPP) single degree of freedom (SDOF) system. The model also accounts for the fact that not all earthquakes are damaging.
The paper is structured in a way that the compound Poisson process modeling damage accumulation is described first. Then, the damage variable selected to define the state of the stochastic model is briefly discussed. Subsequently, the distribution of damage in a single cluster (i.e., a single mainshock-aftershock sequence) is derived. Two alternative models are adopted to represent the damage in the cluster: the gamma and the inverse-Gaussian. The reproductive property of these RVs enables closed-form solutions for the reliability assessment in different cases, each corresponding to a different knowledge regarding the seismic history of the structure. An illustrative application to an EPP–SDOF structure located in an ideal seismic source zone, concludes the work. For this simple structure the model is calibrated and the life-cycle assessment is compared to the case where the aftershock effect is ignored.
2 Damage process formulation
A schematic representation of the issue tackled in this study is given in Fig. 1, where the vertical axis reports the residual seismic capacity as a function of time. The source of deterioration, in absence of aging (not considered in this study), is related to damaging events in seismic sequences comprised of a mainshock and following aftershocks. Considering that a seismic sequence, with duration in the order of weeks/months, may be seen as instantaneous with respect to the life-cycle of the structure, cluster occurrence time is considered coinciding with that of the triggering mainshock. On the other hand, the effect of the (whole) sequence on the structure is evaluated considering the factual occurrence of aftershocks in the cluster. The advantage of this approach is that it allows describing the cluster effect as that of a single shock, as illustrated in Fig. 2. (Clearly, this approach works satisfactorily in the case repair is assumed unfeasible within a sequence.)

Sketch of degradation in structures subjected to seismic damages in mainshock-aftershocks clusters

Seismic cycle representation for a structure subjected to cumulative earthquake damages
Given a metric of the damage effect on the structural performance, for example the residual ductility to collapse, \(\mu \left( t \right) \), the degradation process may be expressed as in Eq. (1). In the equation, \(\mu _0\) is the initial seismic structural capacity in the cycle and \(D\left( t \right) \) is the cumulated damage due to all clusters, \(N\left( t \right) \), occurring within \(t\).
It follows from Eq. (1) that the probability of the structure failing within time \(t\), \(P_f \left( t \right) \), is the probability that the structure passes the limit-state (LS) threshold, \(\mu _{LS}\). It can also be expressed as the probability that the cumulated damage exceeds the difference between the initial capacity and the threshold, \(\bar{{\mu }}=\mu _0 -\mu _{LS}\), as in Eq. (2).
Because in this approach the damage in the single cluster, \(\Delta \mu _i\), and \(N\left( t \right) \) are both RVs, the structural reliability problem may be computed via the total probability theorem as in Eq. (3). In the application of the theorem, the probability of failure (i.e., damage exceeding the threshold) given \(k\) clusters and the probability of occurrence of \(k\) clusters appear (the summations start from one because the terms corresponding to \(i = 0\) do not give any contribution).
The equation assumes that the process underlying the occurrence of clusters is a HPP, as in classical PSHA, which means that the probability of occurrence of \(k\) clusters is derived from a Poisson distribution. Indeed, if mainshock occurrence is stochastically modeled by a HPP with rate \(\lambda \), then, the cluster initiation may be seen as described by the same process. Thus, \(E\left[ {N\left( t \right) } \right] =\lambda \cdot t\) is the expected number of clusters in \(\left( {0,t} \right) \).
Once the total probability theorem is applied, and the probability of occurrence of clusters is formulated, the last issue to solve is to evaluate the probability of failure given \(k\) clusters, \(P\left[ {\sum _{i=1}^k {\Delta \mu _i \ge \bar{{\mu }}|N\left( t \right) =k} } \right] \). Such a probability may be easily computed if \(\Delta \mu _i\), the damage increment in a single cluster, is modeled via a random variable enjoying the additive reproductive property. This means that the sum of i.i.d. RVs belonging to a family featuring the reproductive property, also belongs to the same family of distributions, as it will be clear in the following. A well-known example of reproductive RV is the Gaussian one, as the sum of independent Gaussian variables is still Gaussian; however, it is not suitable to model degradation, which is a monotonic process, thus requiring damage in a single event to be a non-negative RV. In turn, the lognormal RV, often used in the earthquake engineering context to model non-negative random variables, is not reproductive in the additive sense needed in Eq. (3).
Two RVs, featuring the needed property, are the gamma (G) and the inverse-Gaussian (IG), which are two-parameters models. These will be considered in the following to model structural damage in earthquake clusters; however, because reproducibility requires that effects of clusters are independent, this hypothesis will be discussed in the next section along with the assumption that cluster damages are identically distributed.
3 Damage measures and independent and identically distributed increments hypothesis
This section focuses on the properties of some structural damage measures. According to Cosenza and Manfredi (2000), damage indices are usually classified in two categories: (i) displacement-related and (ii) energy-related. Measures in the former class assume that collapse is related to attainment of a maximum strain limit. Those in the latter postulate that damage is related to the amount of dissipated hysteretic energy. In fact, the most representative damage index of category (i) is maximum displacement demand, while hysteretic energy, defined as the total areas of plastic cycles during shaking, is typical of category (ii). Hybrid indices also exist (e.g., Park and Ang 1985).
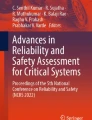
If the simplest non-linear inelastic structure is considered, that is an EPP–SDOF (Fig. 3a), according to a displacement-based damage criterion, in a sequence of two shocks, the accumulation of degradation occurs in the second shock only if the maximum displacement reached (in a certain direction) in the second one is larger than the maximum in the first one. This makes the damage increment dependent at least on the residual displacement of the structure at the time of the shock, and violates the hypothesis that damages in different shocks (that is damage increments) are independent. In this case, state-dependent approaches (e.g., Yeo and Cornell 2009b; Giorgio et al. 2010) may be required to stochastically model degradation. On the other hand, Fig. 3b shows that the area of hysteretic loops during the shaking from the second shock is measured regardless of the previous shaking demand. Therefore, due to the non-evolutionary (Cosenza and Manfredi 2000) features of the EPP–SDOF system response, if a damage index measuring dissipated hysteretic energy is chosen, damage increments in subsequent events are i.i.d. RVs, that is, the response of the structure to a specific shock is independent of its status prior to the shock (see Sect. 4).

Elastic-perfectly-plastic non-evolutionary behavior (a), and monotonic (simplistic) scheme of cumulative response in terms of maximum displacement and dissipated hysteretic energy (b). \(F\) is the force, \(\delta \) is the displacement, and \(y\) subscript indicates yielding
In this work the kinematic ductility, \(\mu \), is considered as a simplistic proxy for dissipated hysteretic energy. Kinematic ductility is the ratio of maximum displacement demand (plastic excursion hereafter) to the yielding displacement (Cosenza et al. 1993). Note that this implies that only events with intensity larger than that required to yield the structure may produce increment of damage. Collapse is assumed to occur when kinematic ductility, conservatively accumulated independently of the sign of maximum displacement, reaches some capacity value.
4 Damage distribution for a single cluster
This section deals with the formulation of the distribution of the damage increment in a single seismic cluster, \(\Delta \mu _i\), which is the fundamental component towards obtaining the distribution of the sum of damage in \(k\) clusters as per Eq. (3). Under the hypotheses discussed in the preceding sections, \(\Delta \mu _i\) may be seen as the damage in the mainshock, \(\Delta \mu _{E,i}\), plus that accumulated in the aftershock sequence, \(\Delta \mu _{A,i}\), pertaining to the same mainshock, Eq. (4).
In the equation, \(N_{A,i}\) is the number of aftershocks in the \(\Delta T_A\) time interval following the i-th mainshock and \(\Delta \mu _{A,ij}\) is the damage in the j-th aftershock. The developed model considers all the terms of Eq. (4) as random. Therefore, in the following, how \(N_{A,i}\) is stochastically modeled is discussed first, then the distribution of \(\Delta \mu _{E,i}\) is addressed, and \(\Delta \mu _{A,ij}\) is discussed. Finally the strategy for combining these terms to get \(\Delta \mu _i\) is illustrated.
4.1 Conditional aftershock occurrence process and APSHA hypotheses
In the APSHA approach, given the occurrence (at \(t=0)\) of the mainshock initiating the seismic sequence, the occurrence of aftershocks is described by a NHPP with daily rate, \(\lambda _{A\left| {M_E } \right. }\), provided by Eq. (5). The rate refers to aftershocks with magnitude bounded between a minimum value of interest, \(m_{\min }\), and that of the mainshock, \(M_E =x\). Coefficients \(a\) and \(b\) are from a suitable Gutenberg-Richter (GR) relationship (Gutenberg and Richter 1944), while \(c\) and \(p\) are those of the modified Omori law (Utsu 1961) for the considered sequence. It also follows from Eq. (5) that the expected number of aftershocks in \(\left( {0,\Delta T_A } \right) \) is given by Eq. (6).
APSHA, provides the rate of exceedance of a ground motion intensity measure (IM) at a site of interest, \(\lambda _{IM_A \left| {M_E } \right. ,R_E } \left( t \right) \), during the aftershock sequence, via Eq. (7).
In the equation, \(f_{M_A ,R_A \left| {M_E ,R_E } \right. }\) is the distribution of aftershock magnitude and distance, \(\left\{ {M_A ,R_A } \right\} \), conditional to those of the mainshock, \(\left\{ {M_E =x,R_E =y} \right\} \), while \(P\left[ {IM>im\left| {M_A =w,R_A =z} \right. } \right] \) is the probability of exceedance of IM, conditional to magnitude and distance, from a ground motion prediction equation (GMPE). It is worth to note that APSHA also assumes that IMs in different aftershocks are i.i.d., given \(\left\{ {M_E ,R_E } \right\} \).
4.2 Mainshock damage
The probability density function (PDF) of the first term on the right hand side of Eq. (4), that is the damage in the mainshock, \(\Delta \mu _{E,i}\), is computed consistently with PBEE. Indeed, the distribution of \(\Delta \mu _{E,i}\), \(f_{\Delta \mu _{E,i}}\), is calculated as in Eq. (8), where \(f_{\Delta \mu _{E,i} \left| {IM} \right. }\) is the distribution of damage given an IM value (e.g., from incremental dynamic analysis or IDA; Vamvatsikos and Cornell 2002), while \(f_{IM_E }\) is the PDF of the chosen IM given the occurrence of a mainshock. The latter, as per the right hand side of Eq. (8), can be computed as in PSHA, via the joint PDF of mainshock magnitude and distance RVs for the construction site, \(f_{M_E ,R_E }\), and the distribution of IM given the mainshock parameters, \(f_{IM\left| {M_E ,R_E } \right. }\), provided by a GMPE.
It will actually be shown in Sect. 4.3, that to compute the distribution of damage in the cluster, the distribution of damage in the mainshock conditional to \(\left\{ {M_E ,R_E } \right\} \) is of interest. This follows from Eq. (8) and is given in Eq. (9), assuming that structural response is independent of \(\left\{ {M_E ,R_E } \right\} \) given IM.
4.3 Damage in the generic aftershock given the mainshock
In order to compute the distribution of damage in a single aftershock of a certain mainshock, a similar approach can be used. This is described by Eq. (10), where \(f_{IM_A \left| {M_E ,R_E } \right. }\) is the distribution of ground motion intensity of the aftershock, given a mainshock of magnitude \(M_E =x\) and separated from the site by a distance \(R_E =y\); i.e., from APSHA.Footnote 1 In fact, \(f_{IM_A \left| {M_E ,R_E } \right. }\) is the PDF corresponding to the integral term of Eq. (7).
Note that the \(f_{\Delta \mu _{A,ij} \left| {IM} \right. }\) term is the same as \(f_{\Delta \mu _{E,i} \left| {IM} \right. }\) in Eq. (9). Indeed, in both equations it is assumed that the response of the structure given the IM, is the same for mainshocks and aftershocks, or \(f_{\Delta \mu _{E,i} \left| {IM} \right. } =f_{\Delta \mu _{A,ij} \left| {IM} \right. } =f_{\Delta \mu \left| {IM} \right. }\), and it is independent of any specific feature of the earthquake (see Sect. 6) such as magnitude and distance. In this case, the IM is said to be a sufficient one (Luco and Cornell 2007). Moreover, it is also assumed that the same GMPE can be used for mainshocks and aftershocks, then also the \(f_{IM\left| {M_A ,R_A } \right. }\) term is the same as \(f_{IM\left| {M_E ,R_E } \right. }\).
4.4 Cluster damage
On the basis of the above equations, it is possible to approach the distribution of damage for the entire cluster. Recalling equation (4), the probability of exceedance of any damage level can be computed as in Eq. (11).
Because of the features of the EPP–SDOF response introduced in Sect. 3, it may be argued that, conditional to \(\left\{ {M_E ,R_E } \right\} \), the damage (increment) in the mainshock and in the aftershock sequence are independent random variables. This is because, as discussed in Sects. 4.2 and 4.3, the effect of any single event in a cluster only depends on the IM, and the IMs associate to the events in a cluster are independent, given the features of the triggering mainshock. Hence, applying the total probability theorem, \(P\left[ {\Delta \mu _{E,i} +\Delta \mu _{A,i} \le \delta \mu } \right] \) of Eq. (11) can be rewritten as in Eq. (12).
In the above equation, the term \(P\left[ {\Delta \mu _{E,i} \le \delta \mu -l|M_E =x,R_E =y} \right] \) is obtained from Eq. (9), while \(f_{\Delta \mu _{A,i} |M_E ,R_E}\) represents the PDF of damage cumulated during the aftershock sequence, given the features of the mainshock. Due to the fact that, as discussed, the aftershock sequence is comprised by a random number of events, \(f_{\Delta \mu _{A,i} |M_E ,R_E}\) can be evaluated by applying the total probability theorem again; Eq. (13). Note that following the APSHA approach, the probability of having \(j\) aftershocks in the cluster is provided by a Poisson distribution with a mean given by Eq. (6). In the equation it is assumed that \(f_{\Delta \mu _{A,i} \left| {M_E ,R_E ,N_{A,i} } \right. }\) degenerates to a unit probability mass at zero when \(j\) equals zero.
Under the assumption that damages produced in different aftershock events are i.i.d. RVs, given \(\left\{ {M_E ,R_E } \right\} \), which also follows from Sect. 3, the distribution of the sum of damages in a given number of aftershocks, conditional to magnitude and distance of the mainshock, \(f_{\Delta \mu _{A,i} \left| {M_E ,R_E ,N_{A,i} } \right. }\), is just the j-th order convolution of \(f_{\Delta \mu _{A,ij} |M_E ,R_E}\) from Eq. (10), with itself, and it will be indicated as \(f_{\Delta \mu _{A,i} |M_E ,R_E }^{\left( j \right) }\) in the following.
Applying a further simplification of the delta method (e.g., Oehlert 1992) to Eq. (13), the infinite-terms summation may be approximated by the term corresponding to the expected number (closest integer) of aftershocks in the time interval of interest, Eq. (14). The suitability of this approximation depends mostly on the variance of the distribution of the number of aftershocks (which is equal to the mean in the case of the Poisson PDF). Examples of the resulting distributions for a given expected number of (damaging) aftershocks, as well as how such an expected number scales with magnitude and distance, are provided in the application section for the selected case-study.
At this point, combining equation (14) with Eq. (12), Eq. (15) results, which gives the probability of exceedance of a damage increment value in the single cluster, once it is assumed that \(f_{\Delta \mu _{A,ij} \left| {M_E ,R_E } \right. }^{\left( {\tilde{N}_A } \right) }\) degenerates to a unitary probability mass at zero damage when \(\tilde{N}_A =0\).Footnote 2
The strategy for computing the integral in Eq. (15) will be discussed in Sect. 6, while Sect. 5 introduces the advantage of assuming that \(\Delta \mu _i\) follows a G or an IG distribution.
5 Reliability solutions for Gamma and Inverse-Gaussian damage in the cluster
Because the EPP–SDOF guarantees that the RVs adopted to model damage, \(\Delta \mu _i\), accumulated over different clusters are i.i.d., a closed-form solution of the reliability problem may be obtained if the sum of the damages in multiple mainshock-aftershock sequences may be expressed using a reproductive and non-negative RV.
5.1 Gamma-distributed damage increments
An option discussed in Iervolino et al. (2013) is given in Eq. (16), in which it is considered that the damage increment is a gamma-distributed RV (\(\Gamma \) is the gamma function). The PDF of this RV is indexed by \(\gamma _D\) and \(\alpha _D\), which are the scale and shape parameters, respectively. The mean and variance are \({\alpha _D }/{\gamma _D }\) and \({\alpha _D }/{\gamma _D^2}\), respectively.
The main advantage of using the gamma model in the context of this study is that the sum of \(k_D\) i.i.d. G-distributed RVs, with parameters \(\gamma _D\) and \(\alpha _D\), remains G-distributed with parameters \(\gamma _D\) and \(k_D \cdot \alpha _D\). Therefore, the probability of cumulative damage exceeding the threshold, conditional to \(k_D\) shocks, is given by Eq. (17) where \(\Gamma \left( {k_D \cdot \alpha _D } \right) \) and \(\Gamma _\mathrm{U} \left( {k_D \cdot \alpha _D ,\gamma _D \cdot \bar{{\mu }}} \right) \) are referred to as the incomplete and the upper-incomplete gamma functions, respectively.
Equation (17), allows a closed-form solution of the reliability problem given in Eq. (3). However, since the gamma RV is continuous, it gives \(P\left[ {\Delta \mu _i =0} \right] =0\); thus, it can be adopted to account only for the effects of damaging clusters (this justifies the subscript \(D\)). This is the reason why the rate in Eq. (3) has to be the one referring to damaging sequences, which can be obtained by the total rate, \(\lambda \), times the probability that a cluster is damaging, that is \(\lambda _D =\lambda \cdot P\left[ {\Delta \mu _i >0} \right] \); to follow.
That said, it might be worthwhile to introduce an approximation enabling a closed-form solution for the reliability assessment. It is given in Eq. (18), where \(P_f \left( t \right) \) is replaced by the probability of failure conditional to the expected number of damaging clusters until \(t\). For the suitability of this approximation see the application section.
5.2 Inverse-Gaussian-distributed damage increments
Another RV with properties similar to those of the gamma, is the inverse-Gaussian, Eq. (19). This RV has a PDF which is also indexed by two parameters: \(\eta _D\) and \(\nu _D\). The mean and variance are \(\nu _D\) and \({\nu _D^3 }/{\eta _D }\), respectively.
The sum of \(k_D\) i.i.d. IG-distributed RVs, each of which with parameters \(\eta _D\) and \(\nu _D\), is still IG with parameters \(k_D^2 \cdot \eta _D\) and \(k_D \cdot \nu _D\); see Eq. (20), where \(F_{IG}\) is the cumulative distribution function of the IG-RV. Therefore, following from Eq. (18), the failure probability in Eq. (3) can be approximated by Eq. (21).
5.3 Conditional reliability approximations
The above formulations provide the absolute (i.e., aprioristic) probability that a new structure fails in a time interval of interest \(\left( {0,t} \right) \). However, according to the formulated models, it is possible to include additional information about the structural conditions in the reliability assessment (e.g., after an inspection), while still retaining the closed-form solutions (Iervolino et al. 2013 and 2014a). More specifically, it is possible to formulate the conditional failure probabilities when: (1) the residual capacity of the structure is known at the time of the reliability assessment; (2) it is only known that the structure is above the failure threshold at the time the evaluation is performed, yet with unknown residual seismic capacity; (3) same as in case (2) with the additional information about the number of damaging clusters the structure sustained up to the time of the assessment.
(1) In this case, at \(t^{*}\) during the life-cycle, the present capacity, \(\mu \left( {t^{*}} \right) \), of the structure is measured. The failure probability conditional to the observed state has the same expression as above, provided that \(\bar{{\mu }}\) and \(t\) of Eqs. (18) and (21), are replaced with \(\bar{{\mu }}^{*}=\mu \left( {t^{*}} \right) -\mu _{LS}\) and \(t-t^{*}\). In fact, the structure now has to undergo a smaller reduction in capacity to fail. Equations (22) and (23) provide such probability when the damage increment in the cluster is amenable to G or IG representation, respectively.
(2) In the second case the structure is still surviving at \(t^{*}\), but with unknown conditions. The failure probability may be computed via Equation (24), which turns into Eqs. (25) and (26) for the G and IG cases, respectively.
(3) Finally, Eq. (27) provides the probability of failure for the structure surviving at time \(t^{*}\) and having sustained \(N_D \left( {t^{*}} \right) =k_D\) damaging clusters. Equations (28) and (29) specialize for the G and IG cases, respectively.
6 Model calibration strategy via an illustrative application
To evaluate the developed models, an illustrative example is developed. To this end, a simple EPP–SDOF system with unloading/reloading stiffness always equal to the initial one is considered. The period of the SDOF system is assumed equal to 0.5 s, its weight is 100 kN, the yielding force is equal to 10 kN, and viscous damping is set at 5 %. The following sub-sections first illustrate the calibration of the damage cluster model. Then, the results of the reliability assessment are discussed and compared with the case where the effects of aftershocks are neglected.
6.1 Mainshock and aftershock intensity distributions
The structure is assumed to be within a generic seismogenetic source zone, the size of which is \(20\times 80\;km^{2}\). Mainshock epicenters are assumed to be uniformly distributed on the lattice in Fig. 4. The event rate of mainshocks, and consequently that of clusters, is assumed to be \(\lambda =0.013\;\left[ {{events}/{yr}} \right] \). The distribution of mainshock magnitude is a truncated exponential one, defined in the \(\left[ {5,6.5} \right] \) range. The \(b\)-value of the GR relationship is 1.056; \(\left\{ {M_E ,R_E } \right\} \) are independent RVs.

Seismogenic source lattice for mainshocks, generic aftershock lattice around a mainshock epicenter, and site
It is assumed that each mainshock has its aftershocks constrained in an area around its epicenter. The size of the aftershock seismogenic zone in squared kilometers, \(S_A\), depends on the magnitude of the triggering event according to Eq. (30), from Utsu (1970). Within this area, arbitrarily assumed to be a square, epicenters are uniformly distributed on a lattice with 0.5 km spacing (see Iervolino et al. 2014b, for a discussion related to these issues).
The time-length of aftershock sequences \(\left( {\Delta T_A } \right) \) is set equal to 90 days after the mainshock (following Yeo and Cornell 2009a). The parameters appearing in Eq. (5), were: \(a=-1.66,\,b=0.96,\,c=0.03,\,p=0.93\), and \(m_{\min } =4.5\); i.e., those of generic aftershock sequences in Italy according to Lolli and Gasperini (2003).
Given this set of parameters and source model, the distributions of IM in the mainshock and in the generic aftershock, given magnitude and location of the mainshock, were computed via the integrals over magnitude and distance appearing at the right hand sides of Eqs. (8) and (10), which are, in fact, hazard integrals without the rate because these PDFs are conditional on the occurrence of the seismic event of interest. The required \(f_{IM|M_E ,R_E}\) and \(f_{IM|M_A ,R_A}\) terms for these calculations were taken considering the Ambraseys et al. (1996) GMPE (on rock). Figure 5 reports the resulting distributions of IM for some pairs of mainshock features.

Distribution of IM in the mainshock given its features (a), and distribution of IM in the generic aftershock given the features of the mainshock as per APSHA (b)
6.2 Distribution of damage given the intensity of a single earthquake shock
As discussed in Sect. 3, the parameter chosen as a proxy for dissipating hysteretic energy in a single earthquake is kinematic ductility computed assuming that the residual displacement of the structure before the earthquake was zero. Therefore, the damage increment, \(\Delta \mu \), in each earthquake event may be evaluated via Equation (31).
In the equation \(\delta _{\max }\) is the maximum absolute value of plastic displacement demand and \(\bar{{\delta }}\) is the displacement associated to the ductility capacity; recalling that \(\mu _0\) is the initial capacity, values of \(\Delta \mu \) larger than one imply failure. Moreover, as discussed earlier, damage is zero in shocks unable to push the structure beyond yielding, which means ground motions with 5 % damped spectral acceleration at 0.5 s lower than 0.10 g.
Since the response of the considered structure in terms of hysteretic energy in a generic earthquake shock should always have the same distribution given a sufficient IM—e.g., first mode spectral acceleration at the elastic period of the SDOF, or \(Sa\left( T \right) \)—and is independent of the shaking history, a single set of IDAs is sufficient to calibrate the damage distribution conditional to earthquake intensity, \(f_{\Delta \mu \left| {IM} \right. }\). In particular, it is sufficient to analyze the response of the as-new structure (see also Iervolino et al. 2013 and 2014a). To this aim, IDAs have been performed using 30 records selected via REXEL (Iervolino et al. 2010), with moment magnitude between 5 and 7, epicentral distances lower than 30 km and stiff site class; Fig. 6a shows IDA’s output. For \(f_{\Delta \mu \left| {IM} \right. }\) a lognormal distribution was assumed, which is a well-established hypothesis in the PBEE context. Figure 6b shows some of these conditional PDFs.

Seismic demand from IDAs (a), and distributions of damage conditional to some ground motion intensity values (b)
6.3 Damage distributions in mainshock, in the aftershock sequence, and in the cluster
The integration of the distributions as per Sects. 4.2 and 4.3 enables to get the PDFs of damage in the mainshocks and in a generic aftershock, conditional to magnitude and distance of the mainshock, according to Eqs. (9) and (10). As an example, the continuous part, \(\tilde{f}_{\Delta \mu _{E,i} \left| {M_E ,R_E } \right. }\) and \(\tilde{f}_{\Delta \mu _{A,ij} \left| {M_E ,R_E } \right. }\), of these distributions are given in Fig. 7.

Distribution of damage: in the mainshock conditional to some magnitude and distance values (a), and in the generic aftershock conditional to the same features of the mainshock (b)
Note that, even if not represented in the figure because of scale issues, both these functions have a concentrated mass at zero, which is the probability that the earthquake of interest is not damaging (i.e., the probability that a shock has intensity lower than yielding the SDOF system). In fact, distributions are defined as in Eq. (32) and in Eq. (33).
In the cases of Fig. 7 \(P_{E,i\left| {M_E ,R_E } \right. }^0 =\left\{ {0.0014, 0.054, 0.21} \right\} \) for \(\left\{ {M_E =6.5,R_E =5} \right\} \), \(\big \{ M_E =6.0, R_E =10 \big \},\,\left\{ {M_E =6.3,R_E =22} \right\} \), respectively, while \(P_{A,ij\left| {M_E ,R_E } \right. }^0 =\left\{ {0.39,0.48,0.81} \right\} \) for \(\left\{ {M_E =6.5,R_E \!=\!5} \right\} \), \(\left\{ {M_E =6.0,R_E =10} \right\} ,\,\left\{ {M_E =6.3,R_E =22} \right\} \), respectively.
Recalling that, while \(f_{\Delta \mu _{E,i} \left| {M_E ,R_E } \right. } \) is directly needed to compute the damage in the cluster as per Eq. (15), \(f_{\Delta \mu _{A,ij} |M_E ,R_E}^{\left( {\tilde{N}_A } \right) }\) is required for aftershocks. This is the PDF of total damage in the aftershock sequence conditional to \(\left\{ {M_E ,R_E } \right\} \) of the mainshock, when the expected number \(\left( {\tilde{N}_A } \right) \) of aftershocks occurs in \(\Delta T_A\). It is convenient here to refer to the process counting the number of damaging aftershocks, as they are the only contributing to damage accumulation. Because of the properties of Poisson processes, the rate of damaging aftershocks is simply that in Eq. (5) times the probability that an aftershock is damaging, Eq. (34). The integer approximation of the expected number of damaging aftershocks is then termed \(\tilde{N}_{A,D}\).
Because, given \(\left\{ {M_E ,R_E } \right\} \), damage in different aftershocks are i.i.d., the \(f_{\Delta \mu _{A,ij} |M_E ,R_E }^{\left( {\tilde{N}_{A,D} } \right) }\) is just the convolution of order \(\tilde{N}_{A,D}\) of \(f_{\Delta \mu _{A,ij} \left| {M_E ,R_E } \right. }\) (which now represents the damage PDF in a damaging aftershock; i.e., does not have a concentrated mass at zero) with itself. The expected number of aftershocks for some \(\left\{ {M_E ,R_E } \right\} \) pairs is given in Fig. 8a, while Fig. 8b reports the distributions of damage in the corresponding aftershock sequences.
These distributions allow the computation, via Equation (15), of the distribution of the damage accumulated in the cluster, that is integrating over \(\left\{ {M_E ,R_E } \right\} \). The \(P\left[ {\Delta \mu _i >\delta \mu } \right] \) distribution obtained is compared in Fig. 9a with the distribution obtained when the contribution of aftershocks is neglected, that is with the results of Eq. (8) in terms of complementary cumulative distribution function (CCDF). Changes in probability, in the case the aftershock sequences are accounted for, are depicted in Fig. 9b. Note that the distribution of damage in the cluster, Eq. (35), is characterized by a probability mass at zero, which accounts for the chance that the cluster is undamaging. For the considered example, the probability that the cluster is undamaging is \(P_i^0 \;=1-P\left[ {\Delta \mu _i >0} \right] =0.62\), and the rate of damaging clusters is \(\lambda _D =\lambda \cdot P\left[ {\Delta \mu _i >0} \right] =0.013\cdot 0.38=0.005\left[ {{events}/{yr}} \right] \). It may also be worth reporting the probability that the mainshock alone is undamaging, which is \(P_{E,i}^0 =0.65\), marginally with respect to \(\left\{ {M_E ,R_E } \right\} \).

Expected number of total and damaging aftershocks conditional to the features of the mainshock (a); distribution of cumulated damage in aftershock sequences (obtained via \(5 \times 10^{4}\) Monte Carlo simulations) conditional to some mainshocks (b)

CCDFs of damage increment in the cluster and in the mainshock only (a); percent probability increments if the aftershock sequence effect is not neglected (b)
6.4 Results of reliability assessment
The distribution of damage in the cluster, \(P\left[ {\Delta \mu _i >\delta \mu } \right] \), given that the cluster is damaging, was then alternatively approximated via a gamma and an inverse-Gaussian distribution. In fact, the damage RV is not continuous as it has a probability mass at zero accounting for the non-damaging clusters, which cannot be modeled by the G and IG models. Therefore, these RVs were adopted only to approximate the continuous part, \(\tilde{f}_{\Delta \mu _i } \), of the distribution in Eq. (35) (whose area is normalized to one). The criterion to calibrate the parameters of the PDFs was to set the mean and variance equal to those of the distribution of damage (conditional to the occurrence of a damaging cluster) obtained via structural analysis. These mean and variance are 0.78 and 2.18, respectively. Table 1 reports the corresponding parameters.
At this point it is possible to compute the probability of failure as a function of time (Fig. 10a) for cases:
-
(i)
according to Eqs. (18) and (21), that is when the distribution of damage in the cluster is assumed to follow a G or an IG distribution, respectively, and the expected number of damaging clusters is considered in lieu of any possible number of clusters;
-
(ii)
when the distribution of damage in the cluster is assumed to follow a G or an IG RV, yet the approximation of the expected number of damaging clusters is relaxed;
-
(iii)
without approximating the number of damaging clusters via its expected value, and without approximating the distribution of damage in the cluster by means of a G or an IG model (that is, using the distribution of damage in Fig. 9a for the cluster, obtained by means of structural analysis);
-
(iv)
without approximating the number of damaging clusters via its expected value, and without approximating the distribution of damage in the cluster by means of a G or an IG model, yet using the distribution of damage in Fig. 9a for the mainshock, that is neglecting the effect of aftershocks.

Lifetime distributions accounting for the cluster effect, with different degrees of approximation, along with that considering only mainshocks (a); failure probabilities from curves in the left panel divided by the reference curve (b)
Cases from (ii) to (iv) were computed applying equation (3); however, it is noted that the case (iii) is a reference case to compare other results, as it is the case without any approximating hypothesis other than the expected number of aftershocks in the sequence (as per Eq. 15), and the use of the lognormal RV to fit IDA results. Therefore, Fig. 10b reports the ratios of the failure probabilities in Fig. 10a divided by those corresponding to this reference case. For example, the ratios obtained by dividing the probabilities from the mainshock curve by those from the reference curve allow the appreciation, in the considered application, of the significance of accounting for the potentially damaging effect of aftershocks in the cluster. Similarly, the ratios of the other curves allow the evaluation of the suitability of modeling damage by means of a gamma or an inverse-Gaussian PDF, and also the suitability of replacing the number of occurring clusters by the expected value of the damaging ones. Results show that considering the mainshocks only leads to an un-conservative estimate of failure probability. Generally speaking, the G approximation of cluster damage seems to provide better results than the IG with respect to the reference case. Moreover, the models based on the gamma distribution, contrary to the inverse-Gaussian ones, appear to be conservative, at least up to number of years of larger engineering interest. However, these observations may be limited to this application.
Finally, Table 2 reports examples of conditional failure probabilities as per Sect. 5.3. In particular, the following cases were considered: (a) failure probability in 50 yr when at 25 yr 0.7 residual capacity is measured, from Eqs. (22) and (23); (b) failure probability in 50 yr when at 25 yr it is observed that the structure hasn’t failed yet, from Eqs. (25) and (26); (c) failure probability in 50 yr when at 25 yr it is observed that the structure hasn’t failed yet, and it is known that it has suffered one damaging cluster, from Eqs. (28) and (29). It is confirmed, at least referring to this application, that the G distribution performs better than the IG.
7 Conclusions
Starting from classical stochastic modeling of mainshock occurrence, conditional process modeling of aftershock sequences, and a probabilistic structural damage accumulation model, life-cycle reliability of constructions subjected to seismic clusters was addressed. The developed model assumes that the occurrence of seismic clusters may be described by the same homogeneous Poisson process characterizing mainshock occurrence, while aftershock occurrences follow a non-homogeneous Poisson process conditional on the mainshock and based on the modified Omori-law.
The structural damage model postulated leads to damage increments in different mainshocks independent and identically distributed; damage increments in aftershocks pertaining to a specific mainshock are also independent and identically distributed random variables, given the mainshock features. This allowed the formulation of the distribution of damage in a generic cluster, which is also i.i.d. with respect to other clusters. The characteristics of the cluster-damage distribution enabled the formulation of a non-negative damage accumulation process. Under the additional hypotheses that damage is either a gamma RV or an inverse-Gaussian RV, closed-form solutions for the life-cycle reliability assessment were derived. Finally, strategies were also formulated, which allow the use of additional information about the status of the structure at the time of the assessment in order to perform state-dependent reliability evaluations.
A simple application was set-up with a twofold aim: (i) to appreciate the effect of changes in reliability assessment when the effect of potentially damaging aftershock sequences are accounted for, and (ii) to evaluate the tolerance of the methodology towards the approximations introduced by the closed-form solutions. An elastic perfectly plastic single-degree-of-freedom system located in a generic seismogenic areal source was considered, spatial distribution of aftershocks was modeled by a semi-empirical relationship function of mainshock magnitude and location. Then, distributions of intensity in mainshocks and in following sequences were obtained. Integration of those with the results of seismic demand analysis for the considered structure, led to the distribution of damage in mainshocks, aftershocks and, finally, in the single (generic) cluster. This distribution, conditional to damage larger than zero, was fitted by the mentioned distributions calibrated to retain mean and variance of damage distribution computed via structural analysis. Results show that, at least in the examined case, the contribution of aftershocks to the life-cycle assessment may be non-negligible, yet the problem may be addressed via stochastic modeling consistent with PBEE and leading to convenient closed-form approximations.
Notes
Models used in this study consider that the aftershock source zone depends on the magnitude and location of the mainshock. Considering magnitude and distance, instead, is equivalent herein. It is also to note that both \(f_{IM_A \left| {M_E ,R_E } \right. }\) and \(f_{IM_E \left| {M_E ,R_E } \right. }\) should be indicated as \(f_{IM_{A,ij} \left| {M_E ,R_E } \right. }\) and \(f_{IM_{E,i} \left| {M_E ,R_E } \right. }\), yet the notation is intentionally simplified due to the i.i.d. features of these RVs. Actually, while also damages are i.i.d., subscript are kept there to avoid confusion, as it will be clarified in the following.
In Eq. (15), and in the others above, the distribution of damage is always indicated as a PDF, for simplicity of notation. However, it is not perfectly appropriate because the damage in a single event is not a continuous RV.
References
Ambraseys NN, Simpson KA, Bommer JJ (1996) Prediction of horizontal response spectra in Europe. Earthq Eng Struct Dyn 25:371–400
Boyd OS (2012) Including foreshocks and aftershocks in time-independent probabilistic seismic hazard analyses. B Seism Soc Am 102(3):909–917
Cornell CA, Krawinkler H (2000) Progress and challenges in seismic performance assessment. Peer Center Newsl 3(2):1–3
Cosenza E, Manfredi G (2000) Damage indices and damage measures. Prog Struct Eng Mat 2(1):50–59
Cosenza E, Manfredi G, Ramasco R (1993) The use of damage functionals in earthquake engineering: a comparison between different methods. Earthq Eng Struct Dyn 22(10):855–868
Giorgio M, Guida M, Pulcini G (2010) A state-dependent wear model with an application to marine engine cylinder liners. Technometrics 52(2):172–187
Gutenberg R, Richter CF (1944) Frequency of earthquakes in California. B Seism Soc Am 34(4):185–188
Iervolino I, Galasso C, Cosenza E (2010) REXEL: computer aided record selection for code-based seismic structural analysis. B Earthq Eng 8(2):339–362
Iervolino I, Giorgio M, Chioccarelli E (2013) Gamma degradation models for earthquake resistant structures. Struct Saf 45:48–58
Iervolino I, Giorgio M, Chioccarelli E (2014a) Closed-form aftershock reliability of damage-cumulating elastic-perfectly-plastics-systems. Earthq Eng Struct Dyn 43(4):613–625
Iervolino I, Giorgio M, Polidoro B (2014b) Sequence-based probabilistic seismic hazard analysis. B Seism Soc Am 104(2):1006–1012
Lolli B, Gasperini P (2003) Aftershocks hazard in Italy Part I: estimation of time-magnitude distribution model parameters and computation of probabilities of occurrence. J Seismol 7(2):235–257
Luco N, Cornell CA (2007) Structure-specific scalar intensity measures for near-source and ordinary earthquake ground motions. Earthq Spectra 23(2):357–392
McGuire RK (2004) Seismic hazard and risk analysis. Earthquake Engineering Research Institute, MNO-10, Oakland, CA
Oehlert GW (1992) A note on the delta method. Am Stat 46(1):27–29
Park Y, Ang A (1985) Mechanistic seismic damage model for reinforced concrete. J Struct Eng-ASCE 111(4):722–739
Ross SM (1996) Stochastic processes, 2nd edn. Wiley series in probability and statistics: probability and statistics. Wiley, New York
Sanchez-Silva M, Klutke G-A, Rosowsky DV (2011) Life-cycle performance of structures subject to multiple deterioration mechanisms. Struct Saf 33(3):206–217
Utsu T (1961) A statistical study on the occurrence of aftershocks. Geophys Mag 30:521–605
Utsu T (1970) Aftershocks and earthquake statistics (1): Some parameters which characterize an aftershock sequence and their interrelations. J Fac Sci 3(3):129–195 Hokkaido University, Series 7, Geophysics
Vamvatsikos D, Cornell CA (2002) Incremental dynamic analysis. Earthq Eng Struct Dyn 31(3):491–514
Yeo GL, Cornell CA (2009a) A probabilistic framework for quantification of aftershock ground-motion hazard in California: methodology and parametric study. Earthq Eng Struct Dyn 38:45–60
Yeo GL, Cornell CA (2009b) Building life-cycle cost analysis due to mainshock and aftershock occurrences. Struct Saf 31(5):396–408
Acknowledgments
The study was partially developed in the framework of AMRA—Analisi e Monitoraggio dei Rischi Ambientali scarl (http://www.amracenter.com), within the Strategies and tools for Real-Time Earthquake Risk Reduction project (REAKT; http://www.reaktproject.eu) funded by the European Commission via the FP7 programme; Grant No. 282862. Partial support was also from the ISLAR project granted by the AXA Research Fund in 2011. Finally, authors want to thank Racquel K. Hagen of Stanford University who proofread the manuscript, and the anonymous reviewers, as well as the guest editor Christoph Adam, whose comments improved quality and readability of the manuscript.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Iervolino, I., Giorgio, M. & Polidoro, B. Reliability of structures to earthquake clusters. Bull Earthquake Eng 13, 983–1002 (2015). https://doi.org/10.1007/s10518-014-9679-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10518-014-9679-9