
Abstract
Economic-environmental performance or eco-efficiency is a topic of great interest due to the “green movement.” Data Envelopment Analysis (DEA) is a non-parametric method for measuring the eco-efficiencies in comparable Decision-Making Units (DMUs) under various technology assumptions, e.g., constant or variable returns to scale. In the case of variable returns to scale, the returns to scale (RTS) values show whether the DMUs under consideration have the correct scale size or can be improved by upsizing or downsizing. However, sometimes the RTS values for some DMUs are unusually high or low and hence useless in practice. The RTS-mavericks test is devised to propose RTS bounds to fix this flaw. However, these bounds can be ineffective in practice. Even if this flaw is rectified, it needs to be clarified how the concept of RTS-mavericks influences eco-efficiency analysis. For the case of a single technology and a combination of two technologies (a so-called pollution-generating technology), we derive RTS equations and develop new median-based optimization problems to correct this flaw and show that the new concept can lead to non-convex technologies. We also demonstrate the applicability and exhibit the efficacy of the proposed model in the context of eco-efficiency analysis in the European Union.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The green movement and eco-efficiency analysis have become important issues for corporations and politicians. According to Emrouznejad and Yang (2018), eco-efficiency is one of the top five most popular research keywords in the Data Envelopment Analysis (DEA) articles. Eco-efficiency applications in DEA range from power plants and freight transportation to agriculture and dairy farms. Eco-efficiency in most DEA applications is simply an indicator of the environmental performance of profit and/or non-profit entities, cf., e.g., Koskela and Vehmas (2012), Moutinho et al. (2018), Wu et al. (2018), Bianchi et al. (2020), and Ezici et al. (2020). In many eco-efficiency studies, the authors apply different concepts such as Malmquist indices, metafrontier approaches, and other technologies or efficiency measures to determine eco-efficiencies (Chen & Lin, 2020; Dakpo & Lansink, 2019; Fukuyama et al., 2020; Sueyoshi et al., 2019; Zhu et al., 2019). However, outlier detection does not play any role in such studies, although DEA, as a non-parametric method, can be strongly influenced by outliers. In this paper, we show that a specific outlier can significantly impact eco-efficiencies and, hence, on the policymaking process; and we develop a novel method to correct the DEA-based estimates.
DEA is a well-established method for measuring the efficiencies among a comparable set of profit and non-profit entities, called Decision Making Units (DMUs), cf. Charnes et al. (1978) and Banker et al. (1984). In classical DEA, the efficiencies are determined by comparing the empirically observed activities—inputs and outputs—with each other. But before doing this, inter alia, one has to specify a production possibility set or technology, e.g., a technology under constant (CRS) or variable returns to scale (VRS). When applying a technology under VRS—as a by-product—the decision-maker will be informed about the DMUs’ qualitative and quantitative returns to scale (RTS); for more details, readers should refer to Banker et al. (1984), Banker and Thrall (1992), Førsund (1996), Golany and Yu (1997), Podinovski et al. (2009), and Kleine et al. (2016). This information can then be used to develop more effective RTS-driven strategies for realizing scale effects, cf., e.g., Davoodi et al. (2015) and Rödder et al. (2017). Estimating RTS in DEA has attracted attention in both theoretical—see above—and empirical studies—see, e.g., Zhang et al. (2014) and Chang et al. (2015). Interestingly, in Emrouznejad and Yang’s (2018) database, one can find only one paper focusing on quantitative RTS in the context of eco-efficiency—although many studies are based on technology under VRS. Lozano et al. (2011) calculate RTS numbers or scale elasticities for only eco-efficient electronic products to show respective sizing potentials. In the present contribution, however, we show that RTS values can be determined for eco-efficient and eco-inefficient activities.
In DEA literature, many papers focus on outliers or mavericks (e.g., Bahari & Emrouznejad, 2014; Banker & Chang, 2006; Clermont & Schaefer, 2019; Doyle & Green, 1994; Khezrimotlagh et al., 2020; etc.). However, most of them emphasize testing efficiencies or differences between efficiencies. There is only one paper that treats RTS values, cf. Dellnitz (2016).
Generally, RTS-driven recommendations for activity alterations are not always economically meaningful due to unreasonably high or low RTS values. The recommendations have to be revised in such cases, making them more compatible with real-life technological conditions. Therefore, Dellnitz (2016) first provides a median-based test to detect RTS outliers – so-called RTS-mavericks. He then proposes a modification procedure to get a more realistic technology, applying lower- and upper-RTS bounds. These bounds then should allow for better economic assessments of the RTS-mavericks. However, we show that if the respective constraints remain inactive, they do not improve the DMUs’ eco-efficiency assessments. To remedy this shortcoming, we develop new median-driven non-linear optimization problems—for a single technology case and a pollution-generating case, see Murty et al. (2012). Furthermore, after linearizing these models, we prove that solving the respective optimization problems for RTS-mavericks always leads to smaller eco-efficiency scores. As a consequence, the eco-efficiency estimate decreases, and the RTS value becomes more realistic. We further show that this new concept can lead to non-convex technologies. Ultimately, RTS-mavericks are not an artificial concept—they can be observed empirically; this will be illustrated via the agricultural data of 23 member states of the European Union (E.U.). In this context, we discuss issues concerning the underlying distributional assumptions of RTS and present sensitivity results regarding variations of cut-off values for flagging DMUs as RTS-mavericks.
The remainder of this paper is organized as follows: Sect. 2.1 is dedicated to the basics of DEA-based efficiency analysis in the presence of undesirable outputs; in Sect. 2.2, we develop equations to determine RTS in the context of a single technology; in Sect. 2.3, we show how to derive RTS in the presence of a pollution-generating technology. Section 3 presents the concept of RTS-mavericks and the median-driven approach for flagging such DMUs. Section 4 introduces the new optimization models for treating RTS-mavericks in the presence of undesirable outputs. Numerical examples accompany all considerations to demonstrate the gist of the new method. Section 5 is dedicated to the assessment of the agricultural eco-efficiency of the E.U. member states. Finally, Sect. 6 concludes this work.
2 DEA-based RTS in the presence of undesirable outputs
2.1 Preliminaries regarding the single technology case
DEA plays an important role in eco-efficiency analysis due to the fact that it is possible to consider multiple inputs and multiple outputs—with desirable or undesirable (e.g., waste, emissions, etc.) components. There are several ways to embed such factors in DEA models, depending on the efficiency measure, i.e., radial, super-efficiency, slack-based or directional distance-based instruments, and the respective factors to be addressed; see, for instance, Zhou et al. (2006), Kuosmanen and Kortelainen (2007), Zhang et al. (2008), Wang et al. (2019), Quintano et al. (2020), or for a broader overview Zhou et al. (2018).
The term eco-efficiency refers to a concept in which economic and environmental factors are analyzed simultaneously—in a single technology—to determine a firm’s or a nation’s environmental performance (Koskela & Vehmas, 2012). In this contribution, the authors discuss several definitions regarding eco-efficiency. Here, we focus on the productiveness of a Decision-Making Unit (DMU); that is, for a DMU k ∈ \(\mathcal{J}\), with \(\mathcal{J}=\{1,...,J\}\), we solve the BCC problem (1)—additionally equipped with undesirable outputs—to determine its eco-efficiency; an axiomatic introduction regarding the classical BCC model can be found in Banker et al. (1984). Obviously, we focus on input orientation only, but all subsequent statements can easily be modified to accommodate other technologies as well as eco-efficiency measures. For a discussion of eco-efficiency measures, see Korhonen and Luptacik (2004).
Here, for all DMUs j ∈ \(\mathcal{J}=\{1,...,J\}\), the vectors of goods \({\mathbf{y}}_{j}^{g}\in {\mathbb{R}}_{+}^{{S}^{g}}\) are indicated by the superscript \(g\) and the vectors of bads \({\mathbf{y}}_{j}^{b}\in {\mathbb{R}}_{+}^{{S}^{b}}\) via superscript \(b\).
Let \({(\mathbf{x}}_{j}, {\mathbf{y}}_{j}^{g}, {\mathbf{y}}_{j}^{b})\in {\mathbb{R}}_{+}^{M+{S}^{g}+{S}^{b}}\forall j\in \mathcal{J}\) be the observed activities—the input, desirable and undesirable output vectors—of all DMUs; with \({\mathbf{U}}_{k}^{g},{\mathbf{U}}_{k}^{b},{\mathbf{V}}_{k}\) being the non-negative vectors of corresponding output and input multipliers. The scalar \({u}_{k}\) is well known in the classical BCC problem. This free variable indicates the returns to scale situation of DMU k when the classical BCC problem—i.e., without the bads—is solved, cf. again Banker et al. (1984) or Førsund (1996). Now, we obtain the multiplier-form (2) applying the well-known Charnes-Cooper transformation:
Let \({\mathbf{U}}_{k}^{g*},{\mathbf{U}}_{k}^{b*},{\mathbf{V}}_{k}^{*}, {u}_{k}^{*}\) be an arbitrary optimal solution regarding Model (2), then \({eff}_{k}^{*}\le 1\) determines the eco-efficiency of a DMU k. As mentioned above, \({u}_{k}^{*}\) indicates the RTS situation of DMU k in classical BCC problems; more precisely, DMU k operates under increasing (decreasing) RTS if the sign of \({u}_{k}^{*}\) is positive (negative), and when the optimal value of \({u}_{k}^{*}\) equals zero, we have constant RTS. However, are these statements also true if Eq. (2)—including the bads—is solved? The next section answers this question.
2.2 RTS and undesirable outputs in the single technology case
Classically, the quantitative RTS measure determines the output change rate \(\varepsilon (\delta )\) as a function of the input change rate \(\delta \) under constant efficiency. For proof of respective relations, see, e.g., Banker and Thrall (1992), Golany and Yu (1997), Podinovski et al. (2009), or Kleine et al. (2016). The following proposition transfers this concept to relations involving desirable and undesirable outputs:
Proposition 1
Let \({eff}_{k}^{*}\le 1\), \({\mathbf{U}}_{k}^{g*},{\mathbf{U}}_{k}^{b*},{\mathbf{V}}_{k}^{*}, {u}_{k}^{*}\) be an arbitrary optimal solution regarding (2). Then, radial output changes \({\mathbf{y}}_{k}^{g}\to (1+{\varepsilon }_{k}){\mathbf{y}}_{k}^{g}\) and \({\mathbf{y}}_{k}^{b}\to (1+{\varepsilon }_{k}){\mathbf{y}}_{k}^{b}\) under infinitesimal radial input changes \({\mathbf{x}}_{k}\to (1+\delta ){\mathbf{x}}_{k}\) must yield.
to maintain the eco-efficiency \({eff}_{k}^{*}\le 1.\)
Proof
To prove Proposition 1; first, we take the (in-)efficiency equation
and embed our scaling factors \((1+\delta )\), \(\left(1+{\varepsilon }_{k}\right).\) Hence, we get
\( \begin{gathered} {\mathbf{U}}_{k}^{{g*{\text{T}}}} \left( {1 + \varepsilon _{k} } \right){\mathbf{y}}_{k}^{g} - {\mathbf{U}}_{k}^{{b*{\text{T}}}} \left( {1 + \varepsilon _{k} } \right){\mathbf{y}}_{k}^{b} + u_{k}^{*} - eff_{k}^{*} {\mathbf{V}}_{k}^{{*{\text{T}}}} (1 + \delta ){\mathbf{x}}_{k} = 0 \hfill \\ \Rightarrow {\mathbf{U}}_{k}^{{g*{\text{T}}}} \left( {\varepsilon _{k} } \right){\mathbf{y}}_{k}^{g} - {\mathbf{U}}_{k}^{{b*{\text{T}}}} \left( {\varepsilon _{k} } \right){\mathbf{y}}_{k}^{b} - eff_{k}^{*} {\mathbf{V}}_{k}^{{*{\text{T}}}} (\delta ){\mathbf{x}}_{k} = 0 \hfill \\ \Rightarrow \varepsilon _{k} ({\mathbf{U}}_{k}^{{g*{\text{T}}}} {\mathbf{y}}_{k}^{g} - {\mathbf{U}}_{k}^{{b*{\text{T}}}} {\mathbf{y}}_{k}^{b} ) - eff_{k}^{*} {\mathbf{V}}_{k}^{{*{\text{T}}}} (\delta ){\mathbf{x}}_{k} = 0 \hfill \\ \Rightarrow \varepsilon _{k} ({\mathbf{U}}_{k}^{{g*{\text{T}}}} {\mathbf{y}}_{k}^{g} - {\mathbf{U}}_{k}^{{b*{\text{T}}}} {\mathbf{y}}_{k}^{b} ) = eff_{k}^{*} {\mathbf{V}}_{k}^{{*{\text{T}}}} (\delta ){\mathbf{x}}_{k} \hfill \\ \Rightarrow \frac{{\varepsilon _{k} }}{\delta }({\mathbf{U}}_{k}^{{g*{\text{T}}}} {\mathbf{y}}_{k}^{g} - {\mathbf{U}}_{k}^{{b*{\text{T}}}} {\mathbf{y}}_{k}^{b} ) = eff_{k}^{*} \underbrace {{{\mathbf{V}}_{k}^{{*{\text{T}}}} {\mathbf{x}}_{k} }}_{{ = 1}}\frac{{\varepsilon _{k} }}{\delta } = \frac{{eff_{k}^{*} }}{{{\mathbf{U}}_{k}^{{g*{\text{T}}}} {\mathbf{y}}_{k}^{g} - {\mathbf{U}}_{k}^{{b*{\text{T}}}} {\mathbf{y}}_{k}^{b} }} = \frac{{{\mathbf{U}}_{k}^{{g*{\text{T}}}} {\mathbf{y}}_{k}^{g} - {\mathbf{U}}_{k}^{{b*{\text{T}}}} {\mathbf{y}}_{k}^{b} + u_{k}^{*} }}{{{\mathbf{U}}_{k}^{{g*{\text{T}}}} {\mathbf{y}}_{k}^{g} - {\mathbf{U}}_{k}^{{b*{\text{T}}}} {\mathbf{y}}_{k}^{b} }} \\ \end{gathered} \)
□
In the presence of goods and bads, Eq. (3) determines the returns to scale of a DMU k; that is, the radial output change—desirable and undesirable—when altering (infinitesimally) the inputs. Furthermore, Eq. (3) justifies the following reasoning:
-
\({u}_{k}^{*}>0\to \) increasing RTS (IRS) because goods and bads grow faster than inputs.
-
\({u}_{k}^{*}<0\to \) decreasing RTS (DRS) because goods and bads grow slower than inputs.
-
\({u}_{k}^{*}=0\to \) constant RTS (CRS) because goods, bads, and inputs grow at the same rate.
Interestingly, Eq. (3) comprises two important components: the valuation of the goods \({\mathbf{U}}_{k}^{g*\mathrm{T}}{\mathbf{y}}_{k}^{g}\) and the valuation of the bads \({\mathbf{U}}_{k}^{b*\mathrm{T}}{\mathbf{y}}_{k}^{b}\), which may partly offset the first part.
Problem (2) is a linear program and might be subject to multiple optimal solutions, of course. There are many different ways to deal with such ambiguities in classical DEA. Most of all approaches are based on a two-stage procedure: First, solve the BCC problem; second, fix the BCC efficiency for DMU k and apply a second philosophy, e.g., minimizing/maximizing the sum of all (weighted) deviations from zero in the second group of restrictions, see Doyle and Green (1994), or minimizing/maximizing the value of the free variable \({u}_{k}\) like in Banker and Thrall (1992) and Golany and Yu (1997). In the presence of undesirable outputs, we can make use of such philosophy solving Model (4).
Banker and Thrall (1992) have proven that for an efficient DMU k, the optimization of (4) is sufficient to fully fathom the RTS interval; cf. Banker and Thrall (1992), p. 82. This is also true for (4)—even if \({eff}_{k}^{*}\le 1\).
Proposition 2
Solving (4) is sufficient to fully fathom the RTS interval, even for \({eff}_{k}^{*}\le 1\).
Proof
Due to \({\mathbf{U}}_{k}^{g\mathrm{T}}{\mathbf{y}}_{k}^{g} - {\mathbf{U}}_{k}^{b\mathrm{T}}{\mathbf{y}}_{k}^{b} +{ u}_{k}={eff}_{k}^{*}\) in (4), we have
Hence, for all feasible \({u}_{k}\), the following inequalities hold
\(\frac{{eff}_{k}^{*}}{{eff}_{k}^{*} -{ u}_{k}^{-}}\le \frac{{eff}_{k}^{*}}{{eff}_{k}^{*} -{ u}_{k}}\le \frac{{eff}_{k}^{*}}{{eff}_{k}^{*} -{ u}_{k}^{+}}.\) □
Consequently, with the optimal solutions \({\mathbf{U}}_{k}^{g+},{\mathbf{U}}_{k}^{b+},{\mathbf{V}}_{k}^{+}, {u}_{k}^{+}\) and \({\mathbf{U}}_{k}^{g-},{\mathbf{U}}_{k}^{b-},{\mathbf{V}}_{k}^{-}, {u}_{k}^{-}\) of (4), we have
In the presence of undesirable outputs, the reasoning with respect to RTS can now be generalized:
-
\({{u}_{k}^{+}\ge u}_{k}^{-}>0\to \) IRS.
-
\({{u}_{k}^{-}\le u}_{k}^{+}<0\to \) DRS.
-
\({{u}_{k}^{+}\ge 0\ge u}_{k}^{-}\to \) CRS.
However, RTS values \({\rho }_{k}^{-}=\frac{{eff}_{k}^{*}}{{eff}_{k}^{*} -{ u}_{k}^{-}}\), \({\rho }_{k}^{+}=\frac{{eff}_{k}^{*}}{{eff}_{k}^{*} -{ u}_{k}^{+}}\) do not always permit veritable recommendations for activity changes, for example, due to infinite numbers, which means that the production of goods and the ejection of bads explodes/implodes when changing inputs infinitesimally. Before addressing these issues, we go one step further and show how RTS can be derived from a pollution-generating technology, which is a combination of two technologies.
2.3 RTS in pollution-generating technologies
Murty et al. (2012) state that treating ‘pollution as a freely disposable input or as a weakly disposable and null-joint output may generate unacceptable implications for the trade-offs among inputs, outputs, and pollution.’ Therefore, the authors develop the concept of a pollution-generating technology. This technology will be modeled as the intersection of an intended-production technology and nature’s residual-generation set, cf. again Murty et al. (2012). Here, the data-driven version of their pollution-generating technology equates to the intersection of two technologies involving constant returns to scale each.
Now, we develop the concept of RTS in a pollution-generating technology involving one technology under constant returns to scale and the another one comprising variable returns to scale.
Therefore, let \({\mathbf{y}}^{g}\in {\mathbb{R}}_{+}^{{S}^{g}}\) be a vector of goods, \({\mathbf{y}}^{b}\in {\mathbb{R}}_{+}^{{S}^{b}}\) a vector of bads. Next, we divide the inputs into one vector \({\mathbf{x}}^{g}\in {\mathbb{R}}_{+}^{{M}^{g}}\) and another one \({\mathbf{x}}^{b}\in {\mathbb{R}}_{+}^{{M}^{b}}\); the latter corresponds to the bads \({\mathbf{y}}^{b}\in {\mathbb{R}}_{+}^{{S}^{b}}\), while \({\mathbf{y}}^{b}\in {\mathbb{R}}_{+}^{{S}^{b}}\) does not instantaneously depend on \({\mathbf{x}}^{g}\in {\mathbb{R}}_{+}^{{M}^{g}}\) and \({\mathbf{y}}^{g}\in {\mathbb{R}}_{+}^{{S}^{g}}\).
Applying this technology, we assume that the intended-production technology implies variable returns to scale, and nature’s residual-generation set follows constant returns to scale. The authors mentioned above discuss some output-oriented efficiency measures when using the pollution-generating technology (7); they show that some might lead to inappropriate results. However, in some cases like in agriculture, an output-orientation—as proposed by them—might be inadequate due to non-controllability. Consequently, we prefer an input-oriented (radial) eco-efficiency measure for a DMU k, as given in the linear program (8). However, our results can easily be transferred to output-oriented or slack-based measures.
Now, dualization of (8) leads to the following linear optimization problem:
Let \({\mathbf{U}}_{k}^{g**},{\mathbf{V}}_{k}^{g**},{\mathbf{V}}_{k}^{b**},{\widetilde{\mathbf{U}}}_{k}^{b**},{\widetilde{\mathbf{V}}}_{k}^{b**}, {u}_{k}^{**}\) be an arbitrary optimal solution regarding (9), then \({eff}_{k}^{**}\le 1\) determines the eco-efficiency of a DMU k. How can we determine the RTS situation of a DMU k in the presence of a pollution-generating technology? The next proposition answers this question.
Proposition 3
Let \({eff}_{k}^{**}\le 1\), \({\mathbf{U}}_{k}^{g**},{\mathbf{V}}_{k}^{g**},{\mathbf{V}}_{k}^{b**},{\widetilde{\mathbf{U}}}_{k}^{b**},{\widetilde{\mathbf{V}}}_{k}^{b**}, {u}_{k}^{**}\) be an arbitrary optimal solution regarding (9). When changing inputs radially, i.e. \({\mathbf{x}}_{k}^{g}\to (1+\delta ){\mathbf{x}}_{k}^{g}\) and \({\mathbf{x}}_{k}^{b}\to (1+\delta ){\mathbf{x}}_{k}^{b}\), then radial changes of goods \({\mathbf{y}}_{k}^{g}\to (1+{\varepsilon }_{k}^{g}){\mathbf{y}}_{k}^{g}\) and bads \({\mathbf{y}}_{k}^{b}\to (1+{\varepsilon }_{k}^{b}){\mathbf{y}}_{k}^{b}\) must yield
to maintain the eco-efficiency \({eff}_{k}^{**}\le 1\) in the pollution-generating technology (7).
Proof
The proof follows the same logic as in Proposition 1. Consequently, i.e., apply the equation \({\mathbf{U}}_{k}^{g**\mathrm{T}}\left(1+{\varepsilon }_{k}^{g}\right){\mathbf{y}}_{k}^{g}- {\widetilde{\mathbf{U}}}_{k}^{b**\mathrm{T}}\left(1+{\varepsilon }_{k}^{b}\right){\mathbf{y}}_{k}^{b}+{ u}_{k}^{**}-{eff}_{k}^{**}\left({\mathbf{V}}_{k}^{g**\mathrm{T}}{\mathbf{x}}_{k}^{g} {+\mathbf{V}}_{k}^{b**\mathrm{T}}{\mathbf{x}}_{k}^{b} {-\widetilde{\mathbf{V}}}_{k}^{b**\mathrm{T}}{\mathbf{x}}_{k}^{b}\right)(1+\delta )=0\)
and reorder terms. Please note that \({\varepsilon }_{k}^{b}=\delta \) is simply a result of the technology assumptions with respect to Eq. (7) or can be proven by rearranging \({\widetilde{\mathbf{U}}}_{k}^{b**\mathrm{T}}\left(1+{\varepsilon }_{k}^{b}\right){\mathbf{y}}_{k}^{b}-{{eff}_{k}^{**}\widetilde{\mathbf{V}}}_{k}^{b**\mathrm{T}}\left(1+\delta \right){\mathbf{x}}_{k}^{b}=0\). □
From Proposition 3, we learn that calculating RTS after solving (9) is not a big issue. However, determining the boundaries of \({\varepsilon }_{k}^{g}\)—like in Proposition 2—is a severe problem due to the interrelations between both different weight systems. To fix the efficiency \({eff}_{k}^{**}\), only, and maximizing/minimizing \({u}_{k}\) as in Eq. (4) is not sufficient; instead, we have to optimize \(\frac{{\varepsilon }_{k}^{g}}{\delta }\) directly. Therefore, we apply the efficiency equation of DMU k
where \({\widehat{\mathbf{x}}}_{k}^{g}:={{eff}_{k}^{**}\mathbf{x}}_{k }^{g}\) and \({\widehat{\mathbf{x}}}_{k}^{b}:={{eff}_{k}^{**}\mathbf{x}}_{k }^{b}\); next, we solve (12) applying \(\delta =1\) w.l.o.g \(.\)
This can be linearized, using the well-known Charnes-Cooper transformation; we obtain:
As mentioned above, optimal \({u}_{k}\) indicates the RTS situation of DMU k in classical BCC problems and in eco-efficiency problems as well—regardless of whether the model consists of one or a combined technology, as demonstrated here. More precisely, we will be informed whether DMU k operates under increasing (decreasing) RTS if the sign of \({u}_{k}\) is positive (negative), and when the optimal value of \({u}_{k}\) equals zero, we have constant RTS. Still, however, RTS values \({\rho }_{k}^{-}=1+ \frac{{ u}_{k}^{-}}{{\mathbf{U}}_{k}^{g--\mathrm{T}}{\mathbf{y}}_{k}^{g}} \,\mathrm{and}\, {\rho }_{k}^{++}=1+ \frac{{ u}_{k}^{++}}{{\mathbf{U}}_{k}^{g++\mathrm{T}}{\mathbf{y}}_{k}^{g}}\), with \({{u}_{k}^{-}, {\mathbf{U}}_{k}^{g--} \,\mathrm{and}\, u}_{k}^{++},{\mathbf{U}}_{k}^{g++}\) being the optimal weights of (13) can also be unreasonable from an economic point of view. We focus mainly on the less restrictive single technology case in the next two sections to provide the reader with the fundamental concept of unreasonable RTS values and comment on the pollution-generating case where necessary.
3 RTS-mavericks and scale restrictions: an unresolved issue
As already stated, some RTS values and respective recommendations might be useless from an operational point of view. Therefore, we recall the following definition, cf. Dellnitz (2016):
Definition 1
A DMU k with abnormally high or low returns to scale is an RTS-maverick.
In this section, we outline the median-based maverick test of Dellnitz (2016) —adapted to our eco-efficiency context—and show its deficit; next, we remedy this deficiency. First, from all feasible RTS values in either case—a single technology or pollution-generating technology, we should select the most cautious numbers for all k ∈ \(\mathcal{J}=\left\{1,...,J\right\}.\) In the single technology case, we have:
-
If DMU k has IRS, then \({\rho }_{k}:={\rho }_{k}^{-}\).
-
If DMU k has DRS, then \({\rho }_{k}:={\rho }_{k}^{+}\).
-
Otherwise \({\rho }_{k}:=1\).
The reason for setting RTS values this way is obvious: This procedure pushes all RTS values as far as possible in the direction of 1—the CRS direction—but maintains the predetermined eco-efficiencies. Thus, it is the most cautious choice from the set of feasible productivity improvement potentials, which can be realized via up- or downsizing respective activities.
Second, let \({\varvec{\rho}}={(\rho }_{1},\dots ,{\rho }_{J})\) be the vector of all (cautiously chosen) RTS values. The median absolute deviation (MAD) then is given by
We determine the test statistic for all DMUs via
where \(\widehat{\sigma }=c\cdot \mathrm{MAD}\) is a consistent estimator for the standard deviation of a normally distributed random variable. c is the reciprocal of the respective quantile value—so-called consistency constant. With these mathematical considerations in mind, we get.
Definition 2
If (15) is greater than the predefined cut-off value (CV), then DMU k is an RTS-maverick, i.e., DMU k is an RTS-maverick if
This definition can also be used if the random variable \({\rho }_{k}\) does not follow any symmetric distribution. In such a case, one needs to replace Eq. (8) by another robust estimator, but the guise of the procedure remains valid; for details on such a robust median-based estimator, see Rousseeuw and Croux (1993). In Sect. 5, we discuss how to calibrate (15) if \({\rho }_{k}\) follows a half-normal distribution, which will be a more accurate assumption, as Proposition 4 summarizes.
Proposition 4
The interval of possible RTS values is left-closed and bounded by zero and right-unbounded, i.e. \({\rho }_{k}\in [0,\infty )\).
Proof
To prove Proposition 4, one has simply to study the boundaries of (3) and (10).
To estimate the efficiency of an RTS-maverick, Dellnitz (2016) proposes a special type of weight restriction—namely scale restrictions. This correction is based on a modification of the BCC model if DMU k is an RTS-maverick; for more details on the general concept of weight restrictions, see Thompson et al. (1986), Dyson et al. (1988), and Podinovski and Bouzdine-Chameeva (2015). In the context of undesirable outputs, we can also make use of scale restrictions. Then, scale restrictions—for the single technology case—have the following form:
The procedure for determining and embedding such constraints in Model (2) or Model (9) comprises five steps and is mainly based on choosing the hyperplane that is closest to the optimal hyperplane of the DMU k under consideration, cf. Dellnitz (2016). This then leads either to an efficiency change or leaves it unchanged. However, it is not ensured that the new reference hyperplane will be effective; even worse, this new reference could not have any bearing on the previous optimal solution of the DMU. In such cases, the status of the RTS-maverick does not change substantially. The following numerical example illustrates this drawback.
3.1 Numerical example
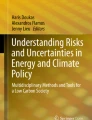
Consider 9 DMUs with one input and one good each, as indicated in Fig. 1. Solving models (2), (4), and calculating \({\rho }_{k}\) and \({\tau }_{k}\), we produce the data in Table 1; here, we assumed that \({\rho }_{k}\) follows a normal distribution, and with the 0.75-quantile value, we have c ≈ 1.4826. If we suppose a cut-off value of 2, then DMU 1 and DMU 3 are RTS-mavericks due to \({\tau }_{1}\),\({\tau }_{3}>2\), see Definition 2.

BCC technology for the numerical example
Now, implementing scale restrictions—as proposed by Dellnitz (2016)—leads to a situation in which only DMU 3 revises its assessment, see Fig. 2. Meaning, a recalculation of (15) for k = 1,3, respecting (16) in problem (2), produces the (adjusted) RTS values \({\widetilde{\rho }}_{1}=2\) and \({\widetilde{\rho }}_{3}=3\) and the related test statistics \({\widetilde{\tau }}_{1}=2.194\) and \({\widetilde{\tau }}_{3}=4.387\)—what is indicated by the tilde symbols. Of course, the situation for DMU 3 has slightly improved, but DMU 1 and DMU 3 are still flagged as RTS-mavericks according to \({\widetilde{\tau }}_{1}\),\({\widetilde{\tau }}_{3}>2\).

Modified technology (using (16) in Model (2)) for the numerical example
Obviously, the procedure only partially mitigates the problem of determining (eco-) efficiencies for RTS-mavericks. That is, when choosing the weights of another hyperplane to revise the assessment of an RTS-maverick, we do not check again whether the adjusted values meet the requisite condition of Definition 2.
The example illustrates that the issue of treating RTS-mavericks has not yet completely disappeared. What happens if undesirable outputs are taken into account? The answer to this question is rather simple: due to the fact that the consideration of undesirable outputs widens the feasible region, we can also obtain unreasonable RTS valuations. Consequently, the situation can get even worse under such circumstances. Furthermore, in the case of a single technology, the example can easily be reinterpreted because the bads here are formally treated as inputs. In the next section, we further discuss RTS-mavericks and their treatment.
4 Eco-efficiency estimation of RTS-mavericks
As already shown, the main problem is that when using the modification procedure sketched in Sect. 3, the adjusted RTS values will not be verified again. A possible path to cure this deficit could be an iterative process, where a do-while loop will run through the weight space until it finds a suitable hyperplane; however, this is very expensive from a computational point of view.
Therefore, this section proposes a new optimization model for the single technology case, which includes the statistical verification step—one linear program for each RTS-maverick instead of an iterative algorithm for seeking reasonable weights. Before doing so, we suppose.
Proposition 5
The median RTS value cannot be flagged as an outlier.
Proof
We have to calculate the test statistic (15) with \({\rho }_{k}:=median\left({\varvec{\rho}}\right)\) and \(\widehat{\sigma }\) > 0, to verify whether the median RTS value is an outlier, i.e.
Consequently, the numerator in the above fraction vanishes. The proof then follows immediately from Definition 2 because for all CV ≥ 0 we also have \({\mathrm{CV}\ge \tau }_{k}\). □
In our numerical example, there are two DMUs that confirm this statement; refer to DMU 4 and DMU 5 in Table 1. Keeping this in mind, we now present the new optimization Model (17), using a single technology concept:
Applying (17), we search—from a statistical point of view—for a modified eco-efficiency score that directly meets our test statistic and, hence, provides a more realistic RTS evaluation. However, problem (17) is non-linear due to \({\rho }_{k}=\frac{{\mathbf{U}}_{k}^{g\mathrm{T}}{\mathbf{y}}_{k}^{g} - {\mathbf{U}}_{k}^{b\mathrm{T}}{\mathbf{y}}_{k}^{b} +{ u}_{k}}{{\mathbf{U}}_{k}^{g\mathrm{T}}{\mathbf{y}}_{k}^{g} - {\mathbf{U}}_{k}^{b\mathrm{T}}{\mathbf{y}}_{k}^{b}}\) and the absolute value function in the numerator of the fraction on the left-hand side. Therefore, multiplying the third group of restrictions by \(\widehat{\sigma }\) and reformulating the absolute value function, we get
Now, multiplying both new inequalities by \({\mathbf{U}}_{k}^{g\mathrm{T}}{\mathbf{y}}_{k}^{g} - {\mathbf{U}}_{k}^{b\mathrm{T}}{\mathbf{y}}_{k}^{b}\), we obtain the linear optimization problem (19).
Proposition 6
Problem (19) is always feasible.
Proof Trivial.
Obviously, Model (19) is more constrained than Model (2), but even more:
Proposition 7
Let \(\mathcal{L}\) be the index set of RTS-mavericks. Then, problem (19) leads to modified eco-efficiency scores \({eff}_{k}^{mod*}<{eff}_{k}^{*} \forall k\in \mathcal{L}\), with \({eff}_{k}^{mod*}and {eff}_{k}^{*}\) being the optimal eco-efficiencies of models (19) and (2).
Proof
Consider a DMU \(k\in \mathcal{L}\)—namely an RTS-maverick. Solving Model (2) for DMU \(k\) results in the eco-efficiency \({eff}_{k}^{*}\). Then, applying (4) yields the interval. More precisely: maintaining eco-efficiency \({eff}_{k}^{*}\) means to select optimal weights \({\mathbf{U}}_{k}^{g*},{\mathbf{U}}_{k}^{b*},{\mathbf{V}}_{k}^{*}, {u}_{k}^{*}\) such that the fraction \({\rho }_{k}\) complies with the aforementioned interval \(\left[\frac{{eff}_{k}^{*}}{{eff}_{k}^{*} -{ u}_{k}^{-}},\frac{{eff}_{k}^{*}}{{eff}_{k}^{*} -{ u}_{k}^{+}}\right]\). Assuming now \({\exists \rho }_{k}\in \left[\frac{{eff}_{k}^{*}}{{eff}_{k}^{*} -{ u}_{k}^{-}},\frac{{eff}_{k}^{*}}{{eff}_{k}^{*} -{ u}_{k}^{+}}\right]\) that fulfills \(\frac{\left|{\rho }_{k}-median\left({\varvec{\rho}}\right)\right|}{\widehat{\sigma }}\le \mathrm{CV}\) leads to a contradiction because then DMU \(k\) would not be regarded as an RTS-maverick. Hence, at least one of the new inequalities must be effective and, as a consequence, \({eff}_{k}^{mod*}<{eff}_{k}^{*} \forall k\in \mathcal{L}\). □
The linear optimization problem (19) pushes the eco-efficiency evaluation as much as possible without jeopardizing the statistical quality of DMU \(k\)’s RTS evaluation. It is also noteworthy that
Proposition 8
The modified eco-efficiency \({eff}_{k}^{mod*}\) is driven by the median RTS value, and the respective eco-efficiency is never smaller than zero.
Proof
Eq. (19) shows that in a worst-case scenario, the DMU’s efficiency equals zero. To prove this, just choose \({\mathbf{U}}_{k}^{g}=0,{\mathbf{U}}_{k}^{b}=0,{ u}_{k}=0\) and \({\mathbf{V}}_{k}\) such that \(\begin{array}{c}{\mathbf{V}}_{k}^{\mathrm{T}}{\mathbf{x}}_{k}=1\end{array}\). □
The complete procedure to determine the eco-efficiencies of RTS-mavericks is as follows:

We study the numerical example once again to show the gist of the new method.
4.1 Numerical example (continued)
Running the entire procedure, with \(\mathrm{CV}=2\) and \(\widehat{\sigma }\approx 0.45586\), one finally obtains the modified efficiencies for DMU 1 and DMU 3 as desired: they adjusted their assessments from \({eff}_{1}^{*}=1\) and \({eff}_{3}^{*}=0.5\) to \({eff}_{1}^{mod*}\approx 0.9774\) and \({eff}_{3}^{mod*}\approx 0.2766\). The RTS values have also been revised: from \({\rho }_{1}=2\) to \({\widetilde{\rho }}_{1}\approx 1.912\) and \({\rho }_{3}=\infty \) also to \({\widetilde{\rho }}_{3}\approx 1.912\). Now, both DMUs are no longer regarded as RTS-mavericks. In Fig. 3, the dashed lines reflect the classical BCC technology. However, the new projection point for DMU 3 is indicated by the circle and the horizontal dashed line; the solid line is the corresponding supporting hyperplane that constitutes this revised evaluation.

New supporting hyperplane and projection point for DMU 3 using Model (19) and CV = 2
Figure 3 shows the solution for only one DMU using the new Model (19). One question is how technology, as a whole, changes with the new constraints. However, to obtain the exact shape of the technology, one would need to determine an infinite number of points on the boundary; however, to get at least an idea of its shape, we create some inefficient points and approximate the technology surface by determining the boundary points of the inefficient points, resulting in Fig. 4. More precisely, to get a better impression of the structural impact on the lower part of the technology when applying the new approach, we calculate the projection points of 299 virtual activities \(\left({\mathbf{x}}_{l}^{^{\prime}},{\mathbf{y}}_{l}^{g{^{\prime}}}\right)\), with \(l=1,\dots ,299\). The virtual activities—to approximate the new technology—are generated by downsizing the output of DMU 4 via \({\mathbf{y}}_{l}^{g{^{\prime}}}:= {\mathbf{y}}_{l-1}^{{g}^{^{\prime}}}-0.01 \forall l>0\) and \({\mathbf{y}}_{0}^{g{^{\prime}}}:={\mathbf{y}}_{4}^{g{^{\prime}}}\); the inputs \({\mathbf{x}}_{l}^{^{\prime}} \forall l\) remain constant at 2. Then, we solve Model (19) for all virtual activities \(\left({\mathbf{x}}_{l}^{^{\prime}},{\mathbf{y}}_{l}^{g{^{\prime}}}\right)\). After projecting them onto the median-driven boundary, we get an approximation of the new technology. The following figure shows this approximation. Most interestingly, solving problem (19) for all virtual activities here leads to a non-convex technology in this very special case. The reason for this is clear: the new statistically motivated constraints are considered individually for each RTS-maverick. These constraints are not applied when evaluating the remaining DMUs.

Approximation of the new (non-convex) technology using Model (19) and CV = 2
Proposition 9
A rigid interpretation of being an outlier, e.g., using CV = 0 in Model (19), allows for a more strict alignment of the RTS values. The new eco-efficiency can then be determined via Model (20), and this eco-efficiency is also never smaller than zero.
Proof Trivial.
Numerical example (continued)
Again, we consider the already known 9 DMUs. Now, applying (20) to determine the worst-case efficiency—in this particular case—yields CCR solutions for DMU 1 and 3. This means Model (20) leads to a combination of a BCC and a CCR technology, as shown in Fig. 5. In this figure, the (dotted) horizontal line marks the cut-off point where activities are no longer regarded as RTS-mavericks if \(\mathrm{CV}=0\).

Combination of BCC and CCR using Model (20)
Again, the reasoning does not change when embedding a bad because it is treated as an input in the single technology case. However, what happens if we consider the pollution-generating case? We can modify the pollution-generating optimization problem given in Sect. 2.3 to cope with RTS-mavericks, starting with the same general constraints on RTS as presented in (17). The respective linear model, statements, and the modified algorithm are provided in Appendix 1. At first glance, both models—single vs. pollution-generating technology—appear similar. However, they can lead to fundamentally different eco-efficiencies because of the interplay of goods, bads, and the corresponding weights. Still, the non-convexity problem can also be present in the pollution-generating technology case, of course; this is due to the median-based constraints.
In conclusion, other outlier tests can, of course, be applied, such as the super-efficiency method of Banker and Chang (2006), to the case of eco-efficiency in general or in conjunction with our method.
In the next section, we check whether RTS-mavericks are only a theoretical concept or can be observed empirically. Accordingly, we comment on the results of both different technology concepts developed so far.
5 RTS-Mavericks in the E.U.: black swans, only?
In recent decades, efficiency and productivity improvements—due to automation—have driven considerable growth in agricultural production. However, there are large differences in efficiency and productivity growth between countries or regions. Developed countries increasingly substitute labor with capital in the agricultural production processes; developing countries are also making also progress in automation and mechanization, but there is still a significant productivity gap between developed and developing countries, and there is evidence that the substitution of labor by capital has a positive impact on environmental sustainability, see, e.g., Grzelak et al. (2019). For this reason, we focus on the member states of the E.U. to ensure the comparability of all DMUs regarding technical and environmental conditions.
The current green movement forces firms to practice sustainability; this is also true in agriculture. The food and agriculture industry is expected to provide healthy and nutritious food for an evolving society, while at the same time, this sector must also use resources more sustainably to preserve, e.g., soil and groundwater. Consequently, determining agriculture (eco-)efficiency is one of the most important application fields in DEA, see Emrouznejad and Yang (2018). When applying any quantitative method to calculate economic and ecological performance, one has to select the measures carefully. In the agriculture industry, Gancone et al. (2017) provide a table on page 310 in which the most prominent indicators are summarized. Based on this table, we apply the following measures to calculate the eco-efficiencies of the member states of the E.U. The inputs are.
-
the total agricultural land area [hectares, thousands] (input 1)
-
the total sales of agricultural pesticides [tonnes] (input 2)
-
total energy consumption [tonnes of oil equivalent, thousands] (input 3, which will be related to the undesirable output)
-
employees [persons, thousands] (input 4)
-
the gross fixed capital formation in agriculture [EUR, millions] (input 5)
-
the desirable output is
-
the gross value added in agriculture [USD, millions] (desirable output)
-
and the undesirable output is
-
the total greenhouse gas emissions in agriculture [tonnes of CO2 equivalent, thousands] (undesirable output).
We use the OECD data (see https://stats.oecd.org/) and Eurostat (https://ec.europa.eu/eurostat) ranging from 2011 to 2017. For 23 member states, respective data are available. However, Italy did not report the land area in 2017, and Poland did not report its public investments in agricultural research and development (R&D) in 2011. We use the mean from 2011 to 2016 and 2012 to 2017 in both cases because the land area varies slightly over the years. This is also true with R&D investment. The following table summarizes some statistical numbers. For all calculations, we have used MATLAB; here, linear optimization problems can be handled flexibly with the linprog function. This was necessary because pollution-generating technologies are not included in standard DEA packages—such as the R-based packages “deaR” or “Benchmarking” (Table 2).
The next Table 3 shows the corresponding linear correlations of inputs and outputs.
Typically, when studying (eco-)efficiencies in the panel data context, there are different ways to model respective time-related production possibility sets or technologies. Here, we assume that the overall technology \(\mathcal{T}\) results from the union of the technologies of the (seven) individual periods – i.e., \(\mathcal{T}={\bigcup }_{t=1}^{7}{\mathcal{T}}_{t}\). To underpin this assumption, we perform the CUSUM tests for each input and output, respectively, to detect possible shifts in the data means, comparing iteratively two consecutive periods (see Barnard, 1959). Consequently, we obtain a six-by-six binary decision matrix, where zero represents stability, and one indicates instability between the means of two periods of an input/output. The test results indicate that the data means are pretty stable over time; only the test for 2013 and 2014 of the second input (the pesticide sales) indicates instability. However, by checking the CUSUM plot (cf. Figure 6), one can see that the sequence of CUSUMs leaves the critical lines at one point and goes only slightly beyond the upper critical line. Summing up, there is no evidence to suggest any significant technological shift.

CUSUM plot for Input 2 (2013 vs. 2014)
After conducting a pre-analysis and brief evaluation of data, Table 4 shows the period-specific maverick flags for the 23 DMUs, applying the single technology-based DEA as proposed in Algorithm 1. For determining the flags and, thus, calculating the eco-efficiencies prudently, have chosen CV = 3; for the moment, we suppose that RTS values are normally distributed.
To demonstrate the impact of the new eco-efficiency optimization problem (19), we present a stem plot of the means of the eco-efficiencies before and after adjusting for RTS-mavericks (Fig. 7):

Eco-efficiencies for the E.U
Obviously, all member states are flagged as RTS-mavericks in some periods (see Table 4) and, hence, eco-efficiencies decrease when applying the new method, cf. again Proposition 7. This means that all DMUs apply somewhat inappropriate RTS values when focusing on eco-efficiency maximization only.
Interestingly, the above figure indicates that the eco-efficiency adjustments regarding Austria, Denmark, Latvia, Lithuania, Luxembourg, Netherlands, Poland, Portugal, etc. are very small. Table 5 summarizes the respective mean numbers for the 23 E.U. member states. All columns display average numbers over the seven periods, i.e., the mean eco-efficiencies and RTS values determined by each Model (mentioned in the header) per year.
Despite the fact that all states have altered their eco-efficiency means—as a consequence of bounding the RTS numbers; surprisingly, the RTS situations of many countries have substantially changed. This means that before using the new method, the agriculture industries of the countries are expected to operate under IRS, and afterward, they are supposed to have nearly CRS. The most significant change in the RTS assessment has happened to Ireland, Ireland’s initial estimate amounting to more than 940,568%. This, of course, might be an inappropriate estimate for its relative gain when only increasing the inputs by 1%. The modifications induced by the new model are in line with the empirical findings of recent studies; cf. Kloss (2017). Here, regression analyses indicate that agricultural activities in the E.U. oscillate closely around CRS.
The countries might overestimate their potential for growth, e.g., Ireland is an example with a big RTS value, to maximize the eco-efficiencies. These results indicate that some eco-efficiencies should be punished for ineffective agriculture management. Comparing the new method with the old procedure of Dellnitz (2016), one can see that the old procedure almost always leads to lower efficiency scores than the new method. In our application, the old method is not in line with the statistical concept and hence is too restrictive; consequently, the old method distorts the valuation of all European countries. It is also noteworthy that both methods push RTS in the CRS direction; consequently, they can counteract misspecifications concerning the underlying production possibility set or technology. Such misspecifications can be further substantiated via other techniques, e.g., Banker (1996) or Alirezaee (2018). As a consequence, applying a technology à la Charnes et al. (1978) forcing \({u}_{k}\) to zero (\({u}_{k}:=0\)) in problem (2) also seems a good choice when studying eco-efficiencies on country-level data via a single technology.
In contrast to that, we obtain recommendations that differ significantly from the single technology case when using a pollution-generating technology; cf. Appendix 2 and the corresponding optimization problem (1A). Here, one can observe that all countries face decreasing returns to scale, which might also be a realistic picture because of the size of respective agriculture activities; the number of farms in the E.U. declines annually while the average farm size expands (Neuenfeldt et al., 2019). Table 6 shows Spearman’s correlation coefficients concerning the efficiency mean-based ranks. The highest correlation between Model (19) and Dellnitz’s method is found. This is unsurprising since Dellnitz’s method can be seen as an approximation to the statistically-based Model (19). More surprising, however, is the slightly weaker correlation between the rankings of Model (19) and Model (1A) as a result of the mixing of two technologies.
However, the RTS numbers regarding the pollution-generating technology are not in line with the above empirical findings on regression-based scale elasticities; hence, we prefer the single technology case.
In the next step, we check to what extent the assumption of normally distributed RTS values distorts the results. Now, we calibrate \(\widehat{\sigma }=c\bullet \mathrm{MAD}\) from Eq. (15) by fitting a half-normal distribution based on the new RTS values displayed in Table 6 and Appendix 2. Accordingly, we use 46 RTS estimates to fit the distribution. Applying such values, we obtain \(\widehat{\sigma }\approx 0.8072\) and \(\widehat{c}\approx \) 2.6771; this, in turn, leads to a parameter update in the optimization problems (19) and (1A). Obviously, the consistency constant is bigger than that of a classical normal distribution; i.e., the parameter update leads to less restrictive models and hence to higher eco-efficiencies in general, see Table 7 (below) and Table 8 (Appendix 2).
Interestingly, Table 7 shows slightly different numbers between the normal and the half-normal case; still, most DMUs operate under (marginal) IRS. Sweden and Lithuania, for example, should increase their activities to benefit from such scalings. The arable land in Sweden covers approximately 7.4% of the total land area, and in Lithuania, it covers about 47.1% of the total land area. Since 1999, both countries have decreased their arable land, but politicians might rethink their design of incentive schemes.
It should be noted that the classification and the eco-efficiency estimate of a DMU depend on the cut-off value CV. In order to study the impact, we additionally calculate the half-normal distribution-based eco-efficiency means for \(\mathrm{CV}=0, 1, 2\); Fig. 8 shows the results. Interestingly, the eco-efficiencies are relatively stable when choosing CV = 1,2,3. However, applying a \(\mathrm{CV}=0\) leads to a big drop in all eco-efficiencies; using this rigid bound, we obtain the results of a classical CCR model, as illustrated in Fig. 5.

Eco-efficiencies under varying \(\mathrm{CV}\)
In statistics, one often applies \(\mathrm{CV}=2\) or \(\mathrm{CV}=3\) to cover most (more than 95%) of the probability mass under the respective probability distribution. In our case, both numbers seem to be a good and prudent choice to determine eco-efficiencies due to the small differences.
Generally speaking, the application immediately demonstrates that detecting RTS-mavericks is, unfortunately, not a rare event. This is due to the nature of efficiency maximization in DEA; here, the optimization proceeds uncontrolled regarding RTS and can lead to unrealistic scaling numbers. In DEA, efficiencies and RTS values are unobservable, but values far from mean or median might be suspicious. Therefore, we developed a new approach to evaluate the DMUs more carefully.
Eventually, the proposed approach might be a suitable instrument for revealing and handling such deficient situations and hence may allow for more reasonable recommendations to politicians, businesses, and society.
6 Conclusions
We prove that returns to scale can be determined if undesirable factors are considered in a single technology case and a pollution-generating technology—which is a combination of two technologies. However, sometimes respective numbers can be unreasonable and, hence, must be revised. In DEA, such cases are called RTS-mavericks; and there is a way to treat them, refer to Dellnitz (2016). In the original median-based procedure, however, the RTS values of the DMUs are only checked once, i.e., the adjusted RTS values are not de novo reviewed and again revised, if necessary.
Therefore, we develop a novel approach embedding the calculation of median-driven test statistics in the respective optimization problems. This allows for determining more realistic returns to scale and eco-efficiencies simultaneously. Furthermore, we show that this new approach can lead to non-convex technologies which are compatible with the property of weak disposability, see, e.g., Podinovski and Kuosmanen (2011). One direction for further research here might be: how can we embed virtual activities consistent with weak disposability and independent from the dataset to facilitate technology generation? Dellnitz and Rödder (2021) have shown that the classical RTS concept is subject to non-monotonic behavior on the boundary of technology: can embedding virtual activities fix this problem. This could also be a worthwhile focus for future research.
Finally, the practicability of the procedure is demonstrated by an empirical analysis of 23 European countries. Here, we consider five inputs: total agricultural land area, the total sales of agricultural pesticides, total energy consumption (which will be related to the undesirable output in the pollution-generating case), employees, and gross fixed capital formation in agriculture; the gross value added in agriculture as desirable output and the total greenhouse gas emissions in agriculture as the undesirable output. The results indicate that most agricultural activities of the 23 European countries are eco-inefficient and should rethink their agricultural activities.
References
Alirezaee, M., Hajinezhad, E., & Paradi, J. C. (2018). Objective identification of technological returns to scale for data envelopment analysis models. European Journal of Operational Research, 266, 678–688.
Bahari, A. R., & Emrouznejad, A. (2014). Influential DMUs and outlier detection in data envelopment analysis with an application to health care. Annals of Operations Research, 223, 95–108.
Banker, R. D. (1996). Hypothesis tests using data envelopment analysis. Journal of Productivity Analysis, 7, 139–159.
Banker, R. D., & Chang, H. (2006). The super-efficiency procedure for outlier identification, not for ranking efficient units. European Journal of Operational Research, 175, 1311–1320.
Banker, R. D., Charnes, A., & Cooper, W. W. (1984). Some models for estimating technical and scale inefficiences in data envelopment analysis. Management Science, 30, 1078–1091.
Banker, R. D., & Thrall, R. M. (1992). Estimation of returns to scale using data envelopment analysis. European Journal of Operational Research, 62, 74–84.
Barnard, G. A. (1959). Control Charts and Stochastic Processes. Journal of the Royal Statistical Society Series B (methodological), 21, 239–271.
Bianchi, M., Valle, I., & Tapia, C. (2020). Measuring eco-efficiency in European regions: Evidence from a territorial perspective. Journal of Cleaner Production, 276, 123–246.
Chang, H., Lam Choy, H., & Hwang, I. (2015). An empirical study of returns to scale of CPA firms in the post SOX era. Annals of Operations Research, 229, 253–264.
Charnes, A., Cooper, W. W., & Rhodes, E. (1978). Measuring the efficiency of decision making units. European Journal of Operational Research, 2, 429–444.
Chen, X., & Lin, B. (2020). Assessment of eco-efficiency change considering energy and environment: A study of China’s non-ferrous metals industry. Journal of Cleaner Production, 277, 123388.
Clermont, M., & Schaefer, J. (2019). Identification of outliers in data envelopment analysis. Schmalenbach Business Review, 71, 475–496.
Dakpo, K. H., & Lansink, A. O. (2019). Dynamic pollution-adjusted inefficiency under the by-production of bad outputs. European Journal of Operational Research, 276, 202–211.
Davoodi, A., Zarepisheh, M., & Zhiani Rezai, H. (2015). The nearest MPSS pattern in data envelopment analysis. Annals of Operations Research, 226, 163–176.
Dellnitz, A. (2016). RTS-mavericks in data envelopment analysis. Operations Research Letters, 44(5), 622–624.
Dellnitz, A., & Rödder, W. (2021). Returns to scale as an established scaling indicator: Always a Good Advisor? Jahrbücher Für Nationalökonomie Und Statistik, 241(2), 173–186.
Doyle, J., & Green, R. (1994). Efficiency and Cross-efficiency in DEA: Derivations, meanings and uses. Journal of Operational Research Society, 45, 567–578.
Dyson, R. G., & Thanassoulis, E. (1988). Reducing weight flexibility in data envelopment analysis. The Journal of the Operational Research Society, 39, 563–576.
Emrouznejad, A., & Yang, G. (2018). A survey and analysis of the first 40 years of scholarly literature in DEA: 1978–2016. Socio-Economic Planning Sciences, 61, 4–8.
Ezici, B., Eğilmez, G., & Gedik, R. (2020). Assessing the eco-efficiency of US manufacturing industries with a focus on renewable vs non-renewable energy use: An integrated time series MRIO and DEA approach. Journal of Cleaner Production, 253, 119630.
Førsund, F. R. (1996). On the calculation of the scale elasticity in DEA models. The Journal of Productivity Analysis, 7, 283–302.
Fukuyama, H., Liu, H., Song, Y., & Yang, G. (2020). Measuring the capacity utilization of the 48 largest iron and steel enterprises in China. European Journal of Operational Research (in Press). https://doi.org/10.1016/j.ejor.2020.06.012
Gancone, A., Pubule, J., Rosa, M., & Blumberga, D. (2017). Evaluation of agriculture eco-efficiency in Latvia. Energy Procedia, 128, 309–315.
Golany, B., & Yu, G. (1997). Estimating returns to scale in DEA. European Journal of Operational Research, 103, 28–37.
Grzelak, A., Guth, M., Matuszczak, A., Czyzewski, B., & Brelik, A. (2019). Approaching the environmental sustainable value in agriculture: How factor endowments foster the eco-efficiency. Journal of Cleaner Production, 241, 118304.
Khezrimotlagh, D., Cook, W. D., & Zhu, J. (2020). A nonparametric framework to detect outliers in estimating production frontiers. European Journal of Operational Research, 286, 375–388.
Kleine, A., Rödder, W., & Dellnitz, A. (2016). Returns to scale revisited towards cross-RTS. In M. Clermont, R. Souren, & H. Ahn (Eds.), Nachhaltiges Entscheiden Beiträge zum multiperspektivischen Performancemanagement von Wertschöpfungsprozessen (pp. 385–404). Springer.
Kloss, M., (2017). Factor productivity in EU agriculture: A microeconometric perspective, Studies on the Agricultural and Food Sector in Transition Economies, No. 89, ISBN 978–3–95992–054–4, Leibniz Institute of Agricultural Development in Transition Economies (IAMO), Halle (Saale), http://nbn-resolving.de/urn:nbn:de:gbv:3:2-86101.
Korhonen, P. J., & Luptacik, M. (2004). Eco-efficiency analysis of power plants: An extension of data envelopment analysis. European Journal of Operational Research, 154, 437–446.
Koskela, M., & Vehmas, J. (2012). Defining eco-efficiency: A case study on the finnish forest industry. Business Strategy and the Environment, 21, 546–566.
Kuosmanen, T., & Kortelainen, M. (2007). Valuing environmental factors in costbenefit analysis using data envelopment analysis. Ecological Economics, 62, 56–65.
Lozano, S., Adenso-Diaz, B., & Barba-Gutierrez, Y. (2011). Russell non-radial ecoefficiency measure and scale elasticity of a sample of electric/electronic products. Journal of the Franklin Institute, 348, 1605–1614.
Moutinho, V., Fuinhas, J. A., Marques, A. C., & Santiago, R. (2018). Assessing eco-efficiency through the DEA analysis and decoupling index in the Latin America countries. Journal of Cleaner Production, 205, 512–524.
Murty, S., Russell, R. R., & Levkoff, S. B. (2012). On modeling pollution-generating technologies. Journal of Environmental Economics and Management, 64(1), 117–135.
Neuenfeldt, S., Gocht, A., Heckelei, T., & Ciaian, P. (2019). Explaining farm structural change in the European agriculture: A novel analytical framework. European Review of Agricultural Economics, 46, 713–768.
Podinovski, V. V., & Bouzdine-Chameeva, T. (2015). Consistent weight restrictions in data envelopment analysis. European Journal of Operational Research, 244, 201–209.
Podinovski, V. V., Førsund, F. R., & Krivonozhko, V. E. (2009). A simple derivation of scale elasticity in data envelopment analysis. European Journal of Operational Research, 197, 149–153.
Podinovski, V. V., & Kuosmanen, T. (2011). Modelling weak disposability in data envelopment analysis under relaxed convexity assumptions. European Journal of Operational Research, 211, 577–585.
Quintano, C., Mazzocchi, P., & Rocca, A. (2020). Examining eco-efficiency in the port sector via non-radial data envelopment analysis and the response based procedure for detecting unit segments. Journal of Cleaner Production, 259, 120979.
Rödder, W., Kleine, A., & Dellnitz, A. (2017). Scaling production and improving efficiency in DEA: An interactive approach. Journal of Industrial Engineering International. https://doi.org/10.1007/s40092-017-0233-7:1-10
Rousseeuw, P. J., & Croux, C. (1993). Alternatives to the median absolute deviation. Journal of the American Statistical Association, 88, 1273–1283.
Sueyoshi, T., Li, A., & Xiaohong, L. (2019). Exploring sources of China’s CO2 emission: Decomposition analysis under different technology changes. European Journal of Operational Research, 279, 984–995.
Thompson, R. G., Singleton, F. D. J., Thrall, R. M., Smith, B. A., & Wilson, M. (1986). Comparative site evaluations for locating a high-energy physics lab in Texas. Interfaces, 16, 35–49.
Wang, X., Ding, H., & Liu, L. (2019). Eco-efficiency measurement of industrial sectors in China: A hybrid super-efficiency DEA analysis. Journal of Cleaner Production, 229, 53–64.
Wu, Y., Chen, Z., & Xia, P. (2018). An extended DEA-based measurement for eco-efficiency from the viewpoint of limited preparation. Journal of Cleaner Production, 195, 721–733.
Zhang, B., Jun, B., Fan, Z., Yuan, Z., & Ge, J. (2008). Eco-efficiency analysis of industrial system in China: A data envelopment analysis approach. Ecological Economics, 68, 306–316.
Zhang, B., Wang, J., Meng, L., Zhu, C., & Nie, R. (2014). Estimating returns to scale of Chinese airport airside activities using the CCR-0-objective RTS method. Journal of the Operational Research Society, 65, 755–762.
Zhou, H., Yang, Y., Chen, Y., & Zhu, J. (2018). Data envelopment analysis application in sustainability: The origins, development and future directions. European Journal of Operational Research, 264, 1–16.
Zhou, P., Ang, B. W., & Poh, K. L. (2006). Slacks-based efficiency measures for modeling environmental performance. Ecological Economics, 60, 111–118.
Zhu, W., Xu, L., Tang, L., & Xiang, X. (2019). Eco-efficiency of the Western Taiwan Straits Economic Zone: An evaluation based on a novel eco-efficiency model and empirical analysis of influencing factors. Journal of Cleaner Production, 234, 638–652.
Acknowledgements
The authors would like to thank the anonymous reviewers and the editors for their insightful comments and suggestions.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The above authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix 1
For the case of a pollution-generating technology, we immediately show the linearized Model (1A) because the linearization follows the same logic as in the single technology case.
Proposition 10
Again, let \(\mathcal{L}\) be the index set of RTS-mavericks. Then, problem (1A) leads to modified eco-efficiency scores \({eff}_{k}^{mod**}<{eff}_{k}^{**} \forall k\in \mathcal{L}\), with \({eff}_{k}^{mod**}and {eff}_{k}^{**}\) being the optimal eco-efficiencies of models (1A) and (9).
Proof
To prove this proposition, one can use the same reasoning as in Proposition 7. □
For the sake of completeness, we give Algorithm 2, which can be used in the case of a pollution-generating technology.

Appendix 2
See Tables
8 and
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Dellnitz, A., Tavana, M. & Banker, R. A novel median-based optimization model for eco-efficiency assessment in data envelopment analysis. Ann Oper Res 322, 661–690 (2023). https://doi.org/10.1007/s10479-022-04937-4
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10479-022-04937-4