
Abstract
Machine learning and artificial intelligence are the two fields of computer science dealing with the innovative idea of inducing smartness and intelligence in machines and automating complex tasks and operations through modern learning algorithms. While the rest of the operational fields have been diligent in developing new technologies, the mining industry has been lacking when it comes to applying these innovative methodologies to achieve operation autonomy with intelligence. However, this trend is beginning to change with a few researchers adopting the fields of machine learning and artificial intelligence to improve the existing technologies. This study was an attempt to review and analyze all the recent automation related work in every sector of the mining industry including mineral prospecting and exploration, mine planning, equipment selection, underground and surface equipment operation, drilling and blasting, mineral processing, etc., for establishing the existing frontiers of technological advancement. Shortcomings and challenges were identified within the current research work. Recommendations were provided to progress the existing technology by implementing deep learning, machine learning, and artificial intelligence for smart and intelligence-based evolution in the mining sector. With all of this innovative development and implementation of smart automation systems, the foundation for the mine of the future could be built, thus creating efficient, effective, and safer machines with sustainable mining operations.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
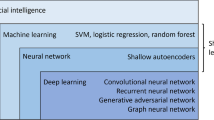
Artificial intelligence is a field of computer science that deals with transforming and developing machines capable of performing a certain task without requiring any specific instruction. The ultimate goal in the field of AI is for machines to achieve the human level of intelligence. Deep learning and machine learning are the subfields or particular applications of AI, which deals with designing algorithms capable of educating machines by helping them recognize patterns and extract knowledge from previous cases.
AI helps society in applications like recognizing cancer tissue faster than the human experts, finding criminal patterns in tons of financial transactions, doing speech and video recognition to converting huge video banks into structured information, creating chatbots that speak and understand speech to become better assistants, and more.
Machine learning and AI can be applied from the beginning of mining to the end of the mine life-cycle, from prospecting to production to closure and mine reclamation. However, according to a recent white paper by Narendran and Weinelt (2017) at World Economic Forum, compared to other industries, especially customer-facing ones, the mining and metals sector is considered to have lower levels of digital utilization. Progress on machine and operation automation with intelligent technology development has been extremely slow (Bellamy and Pravica 2011; Bartos 2007). However, the mining industry is beginning to recognize and understand the importance of these fields and recently has started to explore the development and applicability of these technologies to enhance safety and productivity in mining operations. Therefore, it is of utmost importance to understand the existing frontiers, identify the shortcoming, analyze the technology in the specialized fields and advance the knowledge in the right direction, one that leads to proper intelligence-based technology development and implementation in the mining industry. This study aims to accomplish the aforementioned objective by reviewing the existing frontiers in every mining sector and providing recommendations that are critical to mining technology evolution. Following the advancement path recommended in this study would lead to the mine of the future, where machines will have the capability of operating together without human assistance and thus result in the most efficient, effective, and safe working environment.
The paper is organized as follows: Section 2 describes the methodology adopted for the current study. Section 3 contains a brief introduction to all the articles selected for a major final review in order to establish major improvements along with the existing frontiers for each area in the field of mining. Section 3 also discusses the major shortcomings of the existing mining technology. Section 4 provides a detailed analysis and a set of comprehensive recommendations to address all the shortcomings, along with paving the way for automation technology evolution in the mining sector. Finally, Sect. 5 presents the conclusions of this study.
2 Methodology
All the relevant literature and research work was reviewed in this study with regards to machine and operation automation, focusing on artificial intelligence and machine learning usage, in the field of mining. The main objective of this study was to identify all the shortcomings within the existing knowledge frontiers along with providing comprehensive recommendations to advance the frontiers in an attempt to revolutionize the mining sector by implementing these specialized fields. Mining is a vast field, so in order to achieve this aforementioned objective, in the most efficient way, the field was divided into five main areas based on operational relevance: mineral exploration, mine planning, machine operations, drilling and blasting, and mineral processing. Relevant literature was reviewed to understand the technological progression and establish foundational knowledge in terms of developing intelligence-based systems to achieve process automation within each of the aforementioned areas. Scientific research databases, including but not limited to SpringerLink, Scopus, IEEE Xplore, and ScienceDirect, were explored during this study. Search sentences comprising “machine and artificial intelligence” and/or “operation automation”, for each of the five mining areas, were used to find all the relevant articles. Articles establishing the existing state of the technology, with regards to the developed latest intelligence and automation based systems, were then selected for inclusion and critical analysis as part of the present study. Table 1 displays the statistics exhibiting the number of articles shortlisted for a final review and inclusion for each of the mining areas, along with the time frame covered by the selected articles. Critical analysis of these finalized articles was then carried out to identify the shortcomings within the latest technological systems in the mining field. Recommendations were provided at the end of this paper to address these shortcomings, which is essential to ensure the evolution of mining technology in the right direction, which will in turn lead to an automation-based, efficient, effective, and safe working environment.
3 Research/technology review with regards to ML and AI application for operation automation
In this section, all the work has been reviewed and analyzed in every sector of the mining industry to establish the existing knowledge/technology frontiers and identify the shortcomings.
3.1 Mineral exploration
Mineral exploration and prospecting is the first phase in the mining process. During the initial exploration phase, sophisticated intelligence-based techniques can be used to answer questions about where to explore and which areas to target. Algorithms can be developed and trained to automatically identify rock faces, mineral centric regions, or other important salient features, and then merge different types of structured and unstructured data to create a fuller picture of what is happening on the surface or in the subsurface, all of which can facilitate in narrowing down an exploration area, analyze the prospectivity of any mineral resource, and ultimately identify the locations of high-grade ores.
Researchers have demonstrated the implementation of various machine learning and AI techniques for mineral resource mapping and exploration. Al-Alawi and Tawo (1998) developed an ANN-based model for mineral resource evaluation for a bauxite deposit and compared the results with the geostatistical kriging technique which showed close agreement. Brown et al. (2000) built a multilayer perceptron neural network model using GIS data from various exploration projects in an attempt to prepare a mineral prospectivity map for a gold deposit. Later, Brown et al. (2003) used the neural network model to exhibit improved performance as compared to Bayesian and fuzzy logic models for gold deposit mineral prospectivity mapping. Rigol-Sanchez (2003) exhibited the usage of back propagation ANN to identify mineral rich zones using GIS data containing remote sensing and exploration data for a gold field. Nykanen et al. (2008) developed a fuzzy logic model to locate favorable areas for iron oxide, copper, and gold deposits in Finland using geological, geophysics, geochemistry, and mineral occurrence data. Bokhari et al. (2010) used the fuzzy logic model for mineral potential predictions of various commodities in southwestern China. Lee and Oh (2011) built an artificial neural network to generate a mineral potential map for thirty-two different deposits using the collected geochemical and geophysical data. Rahman et al. (2013) presented the idea of using genetic algorithms for mineral resource mapping using the geological dataset, obtained through diamond drilling, for gold deposits in Western Australia. Setyadi et al. (2016) used the fuzzy logic approach to process site geophysical data to understand the geological feature for mineral resource mapping. The fuzzy logic application was also demonstrated by Kashani et al. (2016) using geological, geochemistry, and mineralogical data to build the fuzzy logic models for copper deposits in Iran. Zhang and Zhou (2015) and Tabaei (2017) introduced specific fuzzy-based models to produce a mineral prospectivity map in order to identify new targets in any area using geochemical and geological data, for mapping mineralization, for gold deposits and using magnetic, geological, and satellite data for the Mississippi valley-type (MVT) deposits, respectively.
Drilling cost can be extremely reduced by using these models for mineral resource mapping. However, these models lack generalization and wide-range applicability, as they are designed for not only a specific set of input parameters (i.e. geophysical, geological, geochemistry, etc.), but are also specific to a certain mineralogical composition or mineral of interest. These shortcomings can be addressed by using image-based recognition techniques that would allow pattern identification regardless of the mineralogical composition of the ore deposit.
State-of-the-art deep learning algorithms, including convolutional neural networks (CNNs), have proven to give exceptional accuracy in terms of image recognition, which researchers can implement for mineral resource mapping and exploration using the surface and sub-surface image data.
3.2 Mine planning
Artificial and computational intelligence can also be used within the domain of smarter planning and operations, where advanced master data management, workflow management, and predictive analytics capabilities can be used to analyze different types of data in real time and optimize short-term planning, scheduling, and transportation. Karadogan et al. (2008) demonstrated the application of the fuzzy set approach for mining method selection using geological, geotechnical, economic, and environment data for an underground mine in Turkey.
Equipment selection is by far the most important phase during mine planning. With a huge amount of capital cost involved, any mistake made during this important decision-making process could easily prove to be detrimental in terms of viability and profitability of any mining project. Smart algorithms can be employed to assist the mining engineers during such a complex multi-variant decision-making process. Bascetin et al. (2006) demonstrated the application of a computer software named equipment selection (EQS) for automating the mining equipment selection process based off of the fuzzy set theory. Bazzazi et al. (2011) introduced a multi-criterion decision-making process based off of fuzzy sets, which can be used to select mining equipment for a particular operation. Hosseini et al. (2012) proposed a fuzzy logic model to investigate the potential of an Iranian coal mine mechanization for decreasing the cost and increasing the overall profitability of the project. Ozkan et al. (2019) successfully applied the fuzzy logic-based model for resource classification when solving previously encountered problems in the conventional method for lignite basin reserves.
Mining reclamation is a key component for attaining sustainability that consists of identifying a proper post-mining use for the concerned land so it can be effectively utilized later by future generations. Selection of proper post-mining land use out of the available options, i.e. agriculture, forest, lake, storage unit, park, backfilling, etc., is based off of multiple factors including cost, area properties, mining activity, available resources, local community needs, etc., thus making it a complex decision-making process. Bandopadhyay and Chattopadhyay (1986) introduced the idea of using the fuzzy logic approach to optimize the post-mining land use. Kommadath et al. (2012) demonstrated the efficiency and effectiveness of the fuzzy logic based model to assess sustainability for the mining sector. Bangian et al. (2011) built a fuzzy logic model to optimize the reclamation process of an open pit copper mine in Iran to justify the associated cost. Anis et al. (2017) demonstrated the application of the GIS-based fuzzy logic model for an optimized utilization of land at the end of mining process for an Indonesian coal mine.
Assessment of risky situations during mining operations is important to create a safe working environment. An intelligent system is essential to overcome the associated uncertainties during each process. Iphar and Cukurluoz (2018) introduced a fuzzy logic-based model for risk assessment and safety evaluation that is more effective than the conventional decision matrix methods at an underground coal mine in Turkey.
Although AI algorithms have been implemented for various tasks involved in mine planning, to the best of the authors’ knowledge, there has not been a general approach for critical tasks, including:
-
Re-optimizing a shift plan of mine activities in real-time for overall mine productivity upon occurrence of an unplanned event.
-
Predicting activities in real-time that can become bottlenecks.
-
Finding patterns in events leading to hazards, accidents, or fatalities, which also enables mine operators to evaluate and understand where their safety standards are lacking.
-
Finding patterns in productivity variance, which can help in operations planning and time management since it highlights areas where improvement is immediately possible.
3.3 Machine Operations
In the area of machine and vehicle operation automation, a few advancements have been made in the recent past, which will be discussed in this section along with their shortcomings.
3.3.1 Underground
Among the recent advancements in machine operation automation, the most advanced implementation of an autonomous system in the underground environment is the LHD automation. The system navigates in the mine by sensing the walls of the tunnel (Roberts et al. 2000). The operation has been demonstrated in 1999 and has been operated in various mines since its successful inception and application. Free range, autonomous straddle carriers have also been implemented commercially (Sukkarieh et al. 1999; Nebot and Surface 2007). The system allows the straddles to move and stack containers from the quay into the holding yards onto the vehicles and back to the quay cranes with centimeter accuracy. Both systems work in an area consisting of only autonomous systems that is devoid of any manual operation. Therefore, they do not have the capability of understanding the nearby environment, recognizing the other machines, interacting with other equipment, and being able to make smart decisions on their own based on the changing environment.
3.3.2 Surface
Surface mining operations are the most dominating mineral excavation methods, accounting for almost 97% of non-fuel minerals and 66% of coal production (DOE, Mining Industry Profile 2019; Ramani 2012). With such an enormous share in the overall mineral production, it is important for these operations to be efficient, effective, and safe (Awuah-Offei and Ur Rehman 2018). From a safety point of view, haul trucks contribute significantly to injuries and accidents in surface mine operations. According to MSHA, out of 250 fatalities that occurred from 1990 to 2001 in surface mining, 40% were attributed to powered haulage. An average of 675 accidents and 21 powered haulage fatalities occur each year in surface mining, and 20% of these injuries and fatalities involve dump trucks (Ruff 2002). Based on 2000 and 2007 data, Ruff et al. (2011) showed that the third most severe equipment accidents in all mines are from dump trucks, and 44% of the fatal accidents in surface mines among mobile machines are caused by dump trucks. According to Adlinger et al. (1995), 46.3% of accidents involving haul trucks occur during operations and 37.7% of these accidents are caused due to jarring, which causes operator back injuries. Therefore, there’s a strong need for haul truck automation in order to control all these injuries and make the operation safe.
From an economics standpoint, truck haulage is the largest operating cost, constituting 50 to 60% of the total surface mining cost (Mukhopadhjay 1989). Therefore, for profitability, it is of utmost importance that we not only increase the availability and utilization of dump trucks, but also improve the efficiency and the effectiveness of truck haulage.
Autonomous haul truck technology has been tried and tested by various manufacturers and mining companies. All three main haul truck manufacturers (Komatsu, Caterpillar, and Hitachi) have collaborated with mining companies (including Rio Tinto, BHP, and Fortescue) to implement their technology in real mine operating environments (Parreira 2013). This haul truck automation technology has shown some positive results; however, it will only flourish after the evolution of real-time smart computational analysis implementation using the information form nearby machines and environment. Such systems virtually mandate how autonomous equipment interacts with other equipment (manned or autonomous) by providing the framework for managing the interaction. Without such a system, equipment interactions need to be eliminated or very closely managed to the point where the limitations outweigh the benefits of automation. Removing the driver means that the functions he or she performs beyond driving need to be performed automatically and with intelligence. Most of these activities are not formal tasks, but rather occur as part of the driver's broader state of awareness. A prime example in that case is having the ability to not just detect the objects in its way and in the nearby environment, but also having the ability to recognize those objects and intelligently decide upon the next action based on that percept rather than having a general action for any object. To accomplish this task, a new perception technology has to be developed that is capable of determining the actual state of the world during machine operation and under all possible environmental conditions.
During truck loading and haulage, an operator experiences severe whole body vibrations, which can cause long-term disabilities if it continues for an extended period of time. Hydro-pneumatic suspension struts are most commonly used in large dump trucks as the vibration attenuation system. With aging, the suspension system deteriorates and loses its capability to effectively attenuate the impact of vibrations produced by the dumping process under gravity. This is due to the contamination of hydraulic oil, mixing of the oil and nitrogen, or rupturing of the gas accumulator diaphragm (Dindarloo 2016). The effectiveness of any suspension system is evaluated by determining the output vibration levels. In the case of the dump truck, it is important to determine the vibration levels at the operator's seat for evaluating the effectiveness of the hydro-pneumatic suspension struts as the truck ages. Artificial intelligence models can be used for suspension system modeling and performance prediction as demonstrated by Ali and Frimpong (2018), where three state-of-the-art artificial intelligence and machine learning models, including Artificial Neural Networks (ANN), Mamdani Fuzzy Logic (MFL), and Hybrid Neural Fuzzy Interference System (HyFIS), were developed and trained in the study for the modeling and prediction of the performance of the hydro-pneumatic suspension system, used in the large capacity dump trucks, and given by the RMS accelerations in vertical and horizontal direction at the operator's seat. These intelligent and self-learning models should now be implemented in the truck control system in order for it to autonomously evaluate the performance of the suspension system in real-time, throughout the machine operation. This will allow the operator or the maintenance crew to have a precise idea of the condition of the suspension system and will allow them to decide on when the maintenance of the suspension system is required. With efficient performance tracking and on time maintenance, the suspension system will always work up to its potential, thus attenuating most of the vibrations produced due to the gravity dumping of the load in the truck. This will enhance the operator's safety and will result in a safer work environment.
Not only should work be done to implement such models in the truck controller, but more emphasis should be given to updating the models and improving the performance of these algorithms in terms of their general operation applicability by feeding them more real-world data from haulage operations.
To the best of the authors’ knowledge, the manufacturers of autonomous technology for haul trucks have not made use of the artificial intelligence and machine learning. The existing algorithms can be modified/trained to develop framework specifically to induce smartness and intelligence in autonomous trucks. A smart and an intelligent autonomous truck should be able to determine the different states of its path, communicate with nearby equipment, and adjust the driving conditions accordingly to optimize the use of the truck. Implementation of such smartly advanced haulage technology would lay the foundation for an enhanced mining setup with improved operations in terms of efficiency, safety, effectiveness, and productivity.
Another important machine operation in surface mining is the earth moving and material excavation, which is primarily done by shovels and draglines. It often involves complex, forceful interactions between an excavator and the ground. The nature of these interactions depends largely on the type, properties, and physical characteristics of the earth material. This process is further complicated by the random occurrence of tree roots, boulders, and other such obstructions. Therefore, the ability of a controller to detect changes in the operating conditions, adjust the digging strategy, and respond in real-time is of utmost importance.
Early studies into autonomous excavation identified some key performance criteria that included the following: (Bradley and Seward 1998).
-
The autonomous excavator must be able to work in any type of earth material.
-
Its excavation accuracy must be within 50 mm.
-
It should be able to handle different surface and underground obstacles autonomously.
-
It should be able to operate at the speed of the average operator in any condition.
-
Its operation should be capable of safe integration with other site systems.
To date, only partial success has been reported for autonomous excavator model developments. Bullock and Oppenheim (1989) developed a sensor-based system for automating the backhoe excavation process for a sand operation by sensing the forces during digging. The system was successfully applied on a laboratory scale with a backhoe operating under a specified trajectory. However, the system stopped upon encountering rock obstruction, thus rendering it inapt for any real-world excavation operation. Gocho et al. (1992) developed an automated wheel loader for common operations, i.e. scooping, hauling and loading, for an asphalt plant as a joint collaboration of Komatsu, Ltd. and Nippon Hodo Co. The system, however, required specific work instructions from the control system for it to operate on site. Huang and Bernold (1993) introduced the idea of rock and utility lines detection in automated control of the backhoe. However, mere detection and path altering is not at all useful in a mining and construction operation where recognition with path optimization to remove that obstruction is required. Shi et al. (1996) used the neural network and fuzzy logic approach to automate the excavation operation. The system had a finite state model, thus limiting its ability to specific actions under specific operating conditions.
Dragline is one of the most efficient and low-cost excavation tools that could be used in surface mining operations (Wei et al. 2007). Automation will only increase the efficiency, safety, and productivity of this equipment. Thus, a group of researchers worked on developing a semi-autonomous dragline model to move 200,000 tons of material in over 12,000 cycles (Corke et al. 1997, 2003; Roberts et al. 1999; Winstanley et al. 1999). However, each of those models failed to address a core common issue during the operation of any autonomous excavator, which is the automatic adjustment of a machine to ground obstructions.
As the research in the modern automation industry has shifted towards vision-based systems, a few researchers used the image recognition techniques to achieve better operation autonomy. Chi and Caldas (2011) proposed the idea of using neural network and Bayes classification models for object recognition on a construction site. Ji et al. (2016) demonstrated the application of a vision-based system, for trucks and hydraulic excavator detection, with a success rate of 73 to 89%. Buger et al. (2017) introduced the novel technique of estimating the productivity of construction equipment using photogrammetry algorithm video analysis.
The vision-based methodology for dragline operation was first introduced by Hainsworth (1996) when a vision-based model for detecting the dragline bucket pose was developed. However, the model failed to produce any satisfactory results upon testing with a full-size dragline. Azar et al. (2012) adopted the HOG method proposed by Dalal et al. (2005) to introduce a pattern-recognition-based system for detecting the dump truck and its loading cycles during operation. However, the system was only capable of detecting a single dump truck, thus lacking applicability during a real-time earth moving operation. Later, Memarzadeh et al. (2013) and Golparvar-Fard et al. (2013) used the same HOG model in combination with the support vector machine (SVM) algorithm for developing the equipment, i.e. excavator and dump truck, recognition model and identification of various phases, i.e. digging, swinging, and dumping, of an excavator operation cycle, respectively, for any excavation site. The HOG method extracts useful features by analyzing the entire image one-by-one, thus resulting in a high computational cost and low efficiency, the two factors critical and detrimental in their wide range of real-time applicability for any vision-based recognition system.
Most recent work in dragline automation was done by Somua-Gyimah et al. (2019) using the state-of-the-art deep learning approach with convolutional neural networks (CNN) for terrain recognition and object detection tasks in mining excavation operations.
The frontiers for surface mining machinery have definitely advanced in recent years with all this ongoing research in automation for machine operation. However, a tremendous amount of modifications and enhancements are required for this modern system to be implemented in any real-time excavation operation and achieving satisfactory results, including increasing the model training, increasing the number of training images, improving the terrain classification, including more excavation movements and machine orientations, adding material texture as a model parameter, etc.
3.4 Drilling and blasting
Drilling and blasting is an important mining operation. The ability to model the performance of any drill and blast operation and finding ways to automate the operation are the key technological advancements that need to be considered.
To evaluate any blast performance, some of the most important indicators include: rock fragmentation, blast induced vibrations, fly rock, back break, etc. (Trivedi et al. 2014). Artificial neural network has been widely used to evaluate and analyze the blast performance. Monjezi et al. (2006) evaluated various training algorithms used for ANN when predicting muck pile ratio, fly rock expectation, and the explosive amount being utilized. Vibrations resulting from blasts during mining activity not only cause annoyance, but also bring about severe environmental impacts such as damage and destruction of vegetation and nearby infrastructure. Therefore, it is considered to be an important blast performance indicator and should be incorporated during the blast design process. Khandelwal and Singh (2009) and Khandelwal et al. (2011) displayed the effectiveness of using ANN for predicting the peak particle velocity for the blast-induced ground vibrations with Zhongya and Xiaoguang (2018), demonstrating the superiority of ANN combined with factor analysis and mean value-based optimization over the non-optimized ANN for the same application. Proper rock fragmentation is essential for a successful blasting operation, as the material handling equipment and processing plant is designed for a specific degree of fragmentation. As it affects the economics and success of every subsequent operation, rock fragmentation is thus considered as an important indicator for evaluating blast performance. Bahrami et al. (2011) and Sayadi et al. (2013) have both shown acceptable results for predicting rock fragmentation using ANN for iron ore and limestone mining operations, respectively. Recently, Ebrahimi et al. (2016) displayed improved accuracy of the ANN model by employing an artificial bee colony algorithm to optimize the blasting input parameters and predict the rock fragmentation in comparison to the empirical model. Tiile (2018) has also demonstrated the effectiveness of ANN over empirical models and conventional statistical techniques for predicting the blast performance, that is characterized by both the degree of resulting vibrations and rock fragmentation for a gold mining operation.
Researchers have also used fuzzy logic, which is the most popular AI methodology for mechanical control systems, to characterize the blasting performance. Ghasemi et al. (2013) developed a Mamdani-based fuzzy logic model for predicting the peak particle velocity during blasting operation for a copper surface mine. Monjezi et al. (2009), Monjezi et al. (2010), and Rezaei et al. (2011) designed a fuzzy logic-based predictive system for rock fragmentation, back break, and fly rock estimation, respectively, for an iron ore mining operation which performed better than the regression, statistical, and empirical methods. Shams et al. (2015) recently introduced a fuzzy inference-based system for rock fragmentation prediction for a copper mining operation as well.
Drilling is an extremely cost-intensive process in terms of both capital and operational cost, and thus requires efficient design and real-time performance evaluation for a successful application. Drilling thrust, rate of penetration, bit tooth wear rate, overbreak, accurate assessment of geological properties, and drilling fluid monitoring are some of the most important parameters effecting the success of any drilling process. Karri (1999) proposed a radial-basis function-based neural network model to predict the drilling performance characterized by drilling thrust and torque. Desai et al. (2006) demonstrated the effectiveness of ANN in combination with evolutionary-techniques-based model training for predicting the drill wear. Torno et al. (2011) designed a fuzzy logic model for the continuous prediction of the geological properties of the rock mass and optimization of drilling parameters during the excavation process for sandstone, gypsum, and igneous rocks in Spain. Jang and Topal (2013) developed an ANN-based prediction system with the capability of serving as an overbreak warning and prevention system during drill and blast operation. Elkatatny et al. (2016) developed a mathematical model using ANN for predicting the emulsion based (oil-based mud) drilling fluid properties. Recently, Lashari et al. (2019) introduced a multi-layered ANN model capable of predicting the rate of penetration along with bit malfunction identification, during the drilling process for shale rock.
One of the most recent algorithms is the hybrid version of the neural network and fuzzy logic models, which has shown exceptional advantages in terms of performance, computation, and model generalization and understanding. Unfortunately, those algorithms have not been implemented for drilling and/or blasting performance characterization. Furthermore, all the existing models have been developed for a particular ore-specific mining process and/or a particular property of interest i.e. rock fragmentation, specific drilling fluid, flyrock, etc., thus limiting the application scope to a specific operation facility and mining process.
The manufacturing industry has started utilizing an intelligent drilling system with fuzzy logic-based controllers (Ahamed et al. 2016; Hashmi et al. 2000; Pendokhare and Quazi 2012). Attempts have been made to automate the drilling and blasting in surface mining operations (Thompson and Modern 1999; Girmscheid and Walti 2000), but no work has been done in developing an intelligent drilling system for mining operations that are not only autonomous, but have the capability to take smart decisions based on the varying environment.
3.5 Ore beneficiation/mineral processing
Froth flotation is one of the most widely used ore beneficiation methods to effectively process the metallic ores and/or produce cleaner coal (Han 1983; Erol et al. 2003; Keys 1986; Demirbaş 2002; Honaker and Mohanty 1996). A number of variables are involved, including the pH of the slurry, impeller speed, air flow rate, flotation time, and the dosages of collector, frother, various depressants, polymer, etc., in any flotation process, which holds the key to an efficient process. Being able to predict the concentrate grade and recovery for a given set up and obtaining the optimum values for all those important involved variables is key for designing an efficient flotation set-up for coal and complex metallic ore mixtures. Machine learning and AI can assist in designing an algorithm/model which, based on the objective of the plant, includes optimal flotation conditions involving all the important variables, and could maximize the plant objective. These intelligent models then need to be implemented in real-time using micro controllers at the plant to monitor and control the input conditions, thus making sure that the metallurgical performance of the plant is never hampered.
Researchers have demonstrated the development of such intelligent systems using artificial neural networks, hybrid neuro-fuzzy systems, support vector machines and random forests for both complex metallic ore beneficiation (Table 2) and cleaning coal (Table 3). Reviewing the resources presented in Tables 2 and 3 indicates that every existing system has been developed for a particular ore feed type and/or the operation specific control parameters, which vary widely based on floation plant objective and equipment setup.
4 Analysis, discussion and recommendations
The majority of the machine learning and AI models in various mining sectors, i.e. mineral prospecting and exploration, mine planning, equipment selection, drilling and blasting, ore beneficiation and mineral processing, etc., are based off of either the artificial neural network or the fuzzy logic approach. The algorithms work well; however, they both have limitations where the neural network struggles with the inference-based decision-making process and the fuzzy-logic lacks the ability of efficient knowledge extraction and pattern recognition (Ali and Frimpong 2018). Hybrid neural-fuzzy algorithms have been introduced recently to overcome these individual shortcomings of the neural network and fuzzy logic models. These new state-of-the-art algorithms should be implemented to improve the model performance, generalization ability, and application scope.
In the field of ore beneficiation and mineral processing, all the existing intelligent models are particular to a certain application, operation, ore type, and flotation plant objective. With different control parameters involved with different operations and processing plants, a new model is required for even a slightly different process application. Thus, a generalized intelligence-based system with the inclusion of all the possible control parameters should be developed along with a self-learning feature so that its implementation scope could be widened, thus resulting in a uniform and efficient applicability for all the various domains.
Artificial intelligence-based systems would have to be developed to take the drilling and blasting beyond the automation, which could be implemented within their control modules by introducing the ability of smart rock surface recognition and enhancing the terrain navigation. Moreover, significant improvements would be required in terms of model development, since existing systems are ore/rock, process and parameter specific, in order to widen the application scope. For mineral exploration and prospecting, the focus should be shifted toward the development of a vision-based system using deep learning and convolution networks for a more generalized methodology capable of working for any mineral composition, at any terrain with enhanced recognition ability.
The autonomous haul trucks are being utilized in various parts of the world for different surface mining operations. These trucks are designed to function in a specific environment with no perception, intelligence and any sort of decision-making ability. That is a result of not utilizing the artificial intelligence and machine learning by the autonomous haul truck manufacturers. An artificial intelligence-based framework needs to be developed in order to induce smartness and intelligence in these autonomous trucks. Driverless trucks need to advance beyond just normal autonomy, achieved by simplistic programming, into a smart and an intelligent machine capable of determining the various states of its path, recognizing different set of objects in its path, communicating with nearby equipment, and adjusting the driving conditions accordingly to optimize the use of the truck in varying environments. There has been no advancement under those lines that could take the technology beyond the current truck auto-motion and thus requires a strong urge to breakthrough this existing technology lull by developing a smart system with all the aforementioned features using convolution networks, deep learning, and artificial intelligence.
In the field of excavation automation technology, few advancements have been made in recent years especially with regards to dragline automation. As an initial step, that convolution network and deep learning-based system needs to be progressed in terms of introducing its applicability to other excavation machines such as shovels, backhoes, etc. Furthermore, the intelligent modern system needs to be enhanced for the possibility of it being utilized for any real-time excavation operations and to achieve improved results, including expanding the algorithm training, enlarging the sets containing the training images, refining and upgrading the terrain classification, including more excavation movements and machine orientations, adjoining material texture in the model control parameter domain, and others.
Recently introduced, neural network-based adaptive control systems (Ghafoor et al. 2018a, b, 2019) can also be used to develop smart systems capable of handling uncertainties by using an efficient and robust event-triggering mechanism that is frequently encountered during any mining operation (i.e. excavation, drilling, etc.).
Another area that requires immediate attention is a safe and secure collection of data and designing a platform for an automated dissemination and usage of that data across the globe to enhance the performance and quick troubleshooting for each of those technologies. The field that deals with such systems is the internet of things (IoT); therefore, researchers need to start working on developing modern IoT based platforms for efficient technology implementation in global mining sector.
By developing and implementing such advanced technology, the foundation can be laid for the mine of the future. That mine of the future will be safer, more productive, more efficient, and more sustainable with the application of smart, intelligent, and automated mining systems.
5 Conclusions
Artificial intelligence and machine learning are currently the two main pillars of modern automation technology. These two fields have influenced almost every industry with billions of dollars being invested to advance the frontiers. The mining industry has been late in recognizing the importance of these advanced fields. However, the research in mining that focuses on technology development by utilizing machine learning and artificial intelligence is beginning to accelerate, even if it is at the slowest pace. In this study, all of the recent work in every sector of the mining industry was reviewed and analyzed when establishing the existing frontiers of technological advancement. In terms of machine operation automation, there has been no advancement ahead of haul truck automation; thus, focus is required to develop and implement vision-based technology to introduce decision-making ability within haul trucks based on varying environments.
With regards to excavation automation, the existing frameworks require severe enhancements through prolonged model training, increased training modules, better terrain and environment classification, better perception technology, etc., in order to achieve satisfactory results. In the field of mineral processing, a unified and generalized machine learning-based model with self-learning ability is required so that its applicability can be extended to any flotation process, with ore of any sort of mineral composition. Modern algorithms including hybrid-neural, deep learning, and convolution networks with exceptional abilities of pattern recognition and knowledge extraction should be utilized in fields like drilling, blasting, mineral prospecting and exploration, ore beneficiation, etc., for a smartly enhanced operational automation.
Moreover, researchers need to start working on developing an implementation framework through IoT in order for this data-based technological advancement to fully prosper in future. All this smart and intelligence-based technology development and implementation is required to get to the mine of the future with a final objective of seeing machines working together on their own and resulting in efficient, effective, safe, and sustainable operations.
References
Aghajani Bazzazi ABBAS, Osanloo M, Karimi B (2011) A new fuzzy multi criteria decision making model for open pit mines equipment selection. Asia-Pacific J Oper Res 28:279–300
Ahmadi A, Hosseini MR (2015) A fuzzy logic model to predict the bioleaching efficiency of copper concentrates in stirred tank reactors. Int J Nonferrous Metall 4:1–8. https://doi.org/10.4236/ijnm.2015.41001
Ahamed NU, Yusof Z, Hamedon Z, Rabbi MF, Sikandar T, Palaniappan R, Ali MA, Rahman SM, Sundaraj K (2016) Fuzzy logic controller design for intelligent drilling system. In: 2016 IEEE international conference on automatic control and intelligent systems (I2CACIS). IEEE, pp 208–213
Al-Alawi SM, Tawo EE (1998) Application of artificial neural networks in mineral resource evaluation. J King Saud Univ Sci 10:127–138
Aldinger JA, Kenny JM, Keran CM (1995) Mobile equipment accidents in surface coal mines. US Bur Mines Inf Circ 9428:51
Ali D, Frimpong S (2018) Artificial intelligence models for predicting the performance of hydro-pneumatic suspension struts in large capacity dump trucks. Int J Ind Ergon 67:283–295. https://doi.org/10.1016/j.ergon.2018.06.005
Ali D, Hayat MB, Alagha L, Molatlhegi O (2018) An evaluation of machine learning and artificial intelligence models for predicting the flotation behavior of fine high-ash coal. Adv Powder Technol 29:3493–3506
Anis M, Idrus A, Amijaya H, Subagyo S (2017) Fuzzy logic approach for post-mining land use planning: a case study on coal mine of Pt. Adaro Indonesia-South Kalimantan. Indones Min J 20:81–91
Awuah-Offei K, Ur Rehman AU (2018) Investigating the information diffusion potential of social media networks. Min Eng SME 70:28–32
Azar RE, Dickinson S, McCabe B (2012) Server-customer interaction tracker: computer vision–based system to estimate dirt-loading cycles. J Constr Eng Manag 139:785–794
Bahrami A, Monjezi M, Goshtasbi K, Ghazvinian A (2011) Prediction of rock fragmentation due to blasting using artificial neural network. Eng Comput 27:177–181
Bandopadhyay S, Chattopadhyay A (1986) Selection of post-mining uses of land via fuzzy algorithm. In: 19th international symposium on applied computer mine planning, pp 321–332
Bangian AH, Ataei M, Sayadi A, Gholinejad A (2011) Fuzzy analytical hierarchy processing to define optimum post mining land use for pit area to clarify reclamation costs. Gospod Surowcami Miner 27:145–168
Bartos PJ (2007) Is Mining a high-tech industry? Investigations into innovation and productivity advance. Resur Policy 32:149–158
Bascetin A, Oztas O, Kanli AI (2006) EQS: a computer software using fuzzy logic for equipment selection in mining engineering. J S Afr Inst Min Metall 106:63
Bekat T, Erdogan M, Inal F, Genc A (2012) Prediction of the bottom ash formed in a coal-fired power plant using artificial neural networks. Energy 45:882–887. https://doi.org/10.1016/j.energy.2012.06.075
Bellamy D, Pravica L (2011) Assessing the impact of driverless haul trucks in Australian Surface Mining. Resour Policy 36:149–158
Bokhari AA, Hu GD, Al-Mokredi M, Benomar T, Diallo Y (2010) Fuzzy logic plateful mineral exploration and development in Southwestern China. In: 2010 2nd International conference information engineering computer science. IEEE, pp 1–4
Bradley DA, Seward DW (1998) The development, control and operation of an autonomous robotic excavator. J Intell Robot Syst 21:73–97
Brown WM, Gedeon TD, Groves DI, Barnes RG (2000) Artificial neural networks: a new method for mineral prospectivity mapping. Aust J Earth Sci 47:757–770
Brown WM, Groves DI, Gedeon TD (2003) An artificial neural network method for mineral prospectivity mapping: a comparison with fuzzy logic and Bayesian probability methods. Springer, Dordrecht
Bullock DM, Oppenheim IJ (1989) A laboratory study of force-cognitive excavation. In: Proceedings sixth international symposium on automation and robotics in construction, pp 64–72.
Bügler M, Borrmann A, Ogunmakin G, Vela PA, Teizer J (2017) Fusion of photogrammetry and video analysis for productivity assessment of earthwork processes. Comput Civ Infrastruct Eng 32:107–123
Cheng J, Li Y, Zhou J, Liu J, Cen K (2010) Maximum solid concentrations of coal water slurries predicted by neural network models. Fuel Process Technol 91:1832–1838. https://doi.org/10.1016/j.fuproc.2010.08.007
Chi S, Caldas CH (2011) Automated object identification using optical video cameras on construction sites. Comput Civ Infrastruct Eng 26:368–380
Corke PI, Winstanley GJ, Roberts JM (1997) Dragline modelling and control. In: 1997 IEEE international conference robotics automation proceedings, IEEE
Corke P, Winstanley G, Dunbabin M, Roberts J (2003) Dragline automation: experimental evaluation through productivity trial. In: Field and service robotics 2003. Springer, Berlin, pp. 459–468.
DOE, Mining Industry Profile, (2019). https://www.energy.gov/eere/amo/mining-industry-profile. Accessed 10 July 2019
Dalal N, Triggs B (2005) Histograms of oriented gradients for human detection. In: 2005 IEEE computer society conference on computer vision and pattern recognition (CVPR'05) 2005. IEEE, vol 1, pp 886–893.
Demirbaş A (2002) Demineralization and desulfurization of coals via column froth flotation and different methods. Energy Convers Manag 43:885–895. https://doi.org/10.1016/S0196-8904(01)00088-7
Desai CK, Shaikh AA (2006) Drill wear monitoring using artificial neural network with differential evolution learning. In: 2006 IEEE international conference industry technology, IEEE, pp. 2019–2022
Dindarloo SR (2016) Dynamic impact of ageing dump truck suspension systems on whole-body vibrations in high-impact shovel loading operations. Missouri University of Science and Technology, Rolla
Ebrahimi E, Monjezi M, Khalesi MR, Armaghani DJ (2016) Prediction and optimization of back-break and rock fragmentation using an artificial neural network and a bee colony algorithm. Bull Eng Geol Environ 75:27–36
Elkatatny S, Tariq Z, Mahmoud M (2016) Real time prediction of drilling fluid rheological properties using Artificial Neural Networks visible mathematical model (white box). J Pet Sci Eng 146:1202–1210
Erol M, Colduroglu C, Aktas Z (2003) The effect of reagents and reagent mixtures on froth flotation of coal fines. Int J Miner Process 71:131–145. https://doi.org/10.1016/S0301-7516(03)00034-6
Feng Q, Zhang J, Zhang X, Wen S (2015) Proximate analysis based prediction of gross calorific value of coals: A comparison of support vector machine, alternating conditional expectation and artificial neural network. Fuel Process Technol 129:120–129. https://doi.org/10.1016/j.fuproc.2014.09.001
Ghafoor A, Balakrishnan SN, Yucelen T (2018a) Modified state observer based decentralized neuro-adaptive controller for large scale interconnected uncertain systems. In: 2018 Annual American Control Conference, Milwaukee, WI, USA8, pp 1701–1706
Ghafoor A, Balakrishnan SN, Jagannathan S, Yucelen T (2018b) Event triggered neuro-adaptive controller (ETNAC) design for uncertain linear systems. In: 2018 IEEE conference on decision and control (CDC) 2018. IEEE, pp 2217–2222
Ghafoor A, Galchenko P, Balakrishnan SN, Pernicka H, Yucelen T (2019) ETNAC design enabling formation flight at liberation points. In: IEEE American Control Conference 2019, Philadelphia, PA, USA, pp 3689–3694
Ghasemi E, Ataei M, Hashemolhosseini H (2013) Development of a fuzzy model for predicting ground vibration caused by rock blasting in surface mining. J Vib Control 19:755–770
Girmscheid G, Wälti R (2000) High performance drill and blast method-progress in efficiency through industrialized backup systems and process configuration. In: Progress in Tunnelling after 2000, vol 2, pp 163–171
Gocho T, Yamabe N, Hamaguchil T, Hitomi S, Ono T, Oshima H, Mori M, Fukuda M (1992) Automatic wheel-loader in asphalt plant. In: Proceeding the 9th international symposium automation and robotics in construction, pp 803–812
Golparvar-Fard M, Heydarian A, Niebles JC (2013) Vision-based action recognition of earthmoving equipment using spatio-temporal features and support vector machine classifiers. Adv Eng Inform 27:652–663
Gonzalez GD, Orchard M, Cerda JL, Casali A, Vallebuona G (2003) Local models for soft-sensors in a rougher flotation bank. Miner Eng 16:441–453. https://doi.org/10.1016/S0892-6875(03)00021-9
Han C (1983) Coal cleaning by froth flotation, Iowa State University
Hainsworth DW (1996) Dragline Automation. In: Australian coal association research program project report, (C3007)
Hargrave JM, Hall ST (1997) Diagnosis of concentrate grade and mass flowrate in tin flotation from colour and surface texture analysis. Miner Eng 10:613–621. https://doi.org/10.1016/S0892-6875(97)00040-X
Hashmi K, Graham ID, Mills B (2000) Fuzzy logic based data selection for the drilling process. J Mater Process Technol 108:55–61
Hayat MB (2018) Performance, Mitigation of environmental hazards of sulfide mineral flotation with an insight into froth stability and flotation. Dissertation for Missouri University of Science & Technology at Rolla MO, USA
Honaker RQ, Mohanty MK (1996) Enhanced column flotation performance for fine coal cleaning. Miner Eng 9:931–945. https://doi.org/10.1016/0892-6875(96)00085-4
Hosseini SH, Samanipour M (2015) Prediction of final concentrate grade using artificial neural networks from Gol-E-Gohar iron ore plant. Am J Min Metall 3(3):58–62. https://doi.org/10.12691/AJMM-3-3-1
Hosseini SAA, Ataei M, Hosseini SM, Akhyani M (2012) Application of fuzzy logic for determining of coal mine mechanization. J Coal Sci Eng 18:225–230
Huang X, Bernold (1993) Robotic rock handling during backhoe excavation. In: 10th automation and robotics in construction, happened at Houston, USA from 24 to 26 May, 1993. Elsevier Science Publisher
Iphar M, Cukurluoz AK (2018) Fuzzy risk assessment for mechanized underground coal mines in Turkey. Int J Occup Saf Erg. https://doi.org/10.1080/10803548.2018.1426804
Jahedsaravani A, Marhaban MH, Massinaei M (2016) Application of statistical and intelligent techniques for modeling of metallurgical performance of a batch flotation process. Chem Eng Commun 203:151–160. https://doi.org/10.1080/00986445.2014.973944
Jang H, Topal E (2013) Optimizing overbreak prediction based on geological parameters comparing multiple regression analysis and artificial neural network. Tunn Undergr Sp Technol 38:161–169
Ji W, Tang L, Li D, Yang W, Liao Q (2016) Video-based construction vehicles detection and its application in intelligent monitoring system. CAAI Trans Intell Technol 1:162–172
Jorjani E, Asadollahi Poorali H, Sam A, Chehreh Chelgani S, Mesroghli S, Shayestehfar MR (2009) Prediction of coal response to froth flotation based on coal analysis using regression and artificial neural network. Miner Eng 22:970–976. https://doi.org/10.1016/j.mineng.2009.03.003
Karri V (1999) RBF neural network for thrust and torque predictions in drilling operations. In: Proceedings third international conference on computational intelligence and multimedia applications. ICCIMA'99 (Cat. No. PR00300) 1999, pp 55–59. IEEE.
Karadogan A, Kahriman A, Ozer U (2008) Application of fuzzy set theory in the selection of underground mining method. J South African Inst Min Metall 108:73–79
Kashani SBM, Abedi M, Norouzi GH (2016) Fuzzy logic mineral potential mapping for copper exploration using multi-disciplinary geo-datasets, a case study in seridune deposit, Iran. Earth Sci Inform 9:167–181
Keys R (1986) Promoters for froth flotation of coal, US Patient 4,589,980
Khandelwal M, Singh TN (2009) Prediction of blast-induced ground vibration using artificial neural network. Int J Rock Mech Min Sci 46:1214–1222
Khandelwal M, Kumar DL, Yellishetty M (2011) Application of soft computing to predict blast-induced ground vibration. Eng Comput 27:117–125
Kommadath B, Sarkar R, Rath B (2012) A fuzzy logic based approach to assess sustainable development of the mining and minerals sector. Sustain Dev 20:386–399
Lashari SZ, Takbiri-Borujeni A, Fathi E, Sun T, Rahmani R, Khazaeli M (2019) Drilling performance monitoring and optimization: a data-driven approach. J Pet Explor Prod Technol 9:2747–2756
Lee S, Oh HJ (2011) Application of artificial neural network for mineral potential mapping, IntechOpen
Marais C (2010) Estimation of concentrate grade in platinum flotation based on froth image analysis, University of Stellenbosch
Memarzadeh M, Golparvar-Fard M, Nieblesc JC (2013) Automated 2D detection of construction equipment and workers from site video streams using histograms of oriented gradients and colors. Autom Constr 32:24–37
Monjezi M, Singh TN, Khandelwal M, Sinha S, Singh V, Hosseini I (2006) Prediction and analysis of blast parameters using artificial neural network. Noise Vib Worldw 37:8–16
Monjezi M, Rezaei M, Varjani AY (2009) Prediction of rock fragmentation due to blasting in Gol-E-Gohar iron mine using fuzzy logic. Int J Rock Mech Min Sci 46:1273–1280
Monjezi M, Rezaei M, Yazdian A (2010) Prediction of backbreak in open-pit blasting using fuzzy set theory. Expert Syst Appl 37:2637–2643
Mukhopadhjay A (1989) Selection, maintenance, and relations of various parameters for off-highway hauling tires. Off-Highway Haulage in Surface Mines, Ed. Golosinski, Sraje, Balkema, pp 153–159
Nakhaei F, Mosavi MR, Sam A, Vaghei Y (2012) Recovery and grade accurate prediction of pilot plant flotation column concentrate: neural network and statistical techniques. Int J Miner Process 110–111:140–154. https://doi.org/10.1016/j.minpro.2012.03.003
Narendran TV, Weinelt B (2017) Digital transformation initiative mining and metals industry, World Econ. Forum. https://reports.weforum.org/digital-transformation/wp-content/blogs.dir/94/mp/files/pages/files/wef-dti-mining-and-metals-white-paper.pdf. Aaccessed 10 June 2019.
Nebot EM (2007) Surface mining: main research issues for autonomous operations. In: Robotics Research. Springer, Berlin, pp 268–280
Nykänen V, Groves DI, Ojala VJ, Eilu P, Gardoll SJ (2008) Reconnaissance-scale conceptual fuzzy-logic prospectivity modelling for iron oxide copper–gold deposits in the northern Fennoscandian Shield, Finland. Aust J Earth Sci 55:25–38
Ozkan E, Iphar M, Konuk A (2019) Fuzzy logic approach in resource classification. Int J Min Reclam Environ 33:183–205
Parreira J (2013) An Interactive simulation model to compare an autonomous haulage truck system with a manually-operated system. University of British Columbia, Vancouver
Pendokhare DG, Quazi TZ (2012) Fuzzy Logic Based Drilling Control Process. Int J Sci Eng Res 5:61–65
Pusat S, Akkoyunlu MT, Pekel E, Akkoyunlu MC, Özkan C, Kara SS (2016) Estimation of coal moisture content in convective drying process using ANFIS. Fuel Process Technol 147:12–17. https://doi.org/10.1016/j.fuproc.2015.12.010
Rahman A, Dutta R, Smith D (2013) Exploring mineral domains with genetic algorithm. In: 2013 international JT conference neural networks. IEEE, pp 1–8
Ramani RV (2012) Surface mining technology: progress and prospects. Procedia Eng 46:9–21
Rezaei M, Monjezi M, Varjani AY (2011) Development of a fuzzy model to predict flyrock in surface mining. Saf Sci 49:298–305
Rigol-Sanchez JP, Chica-Olmo M, Abarca-Hernandez F (2003) Artificial neural networks as a tool for mineral potential mapping with GIS. Int J Remote Sens 24:1151–1156
Roberts JM, Corke PI, Winstanley GJ (1999) Development of a 3500-tonne field robot. Int J Rob Res 18:739–752
Roberts JM, Duff ES, Corke PI, Sikka P, Winstanley GJ, Cunningham J (2000) Autonomous control of underground mining vehicles using reactive navigation. In: Proceedings 2000 ICRA. Millennium Conference. IEEE international conference on robotics and automation. symposia proceedings (Cat. No. 00CH37065) 2000 Apr 24. IEEE, vol 4, pp 3790–3795
Ruff T (2002) Hazard detection and warning devices: safety enhancement for off-highway dump trucks a compend. NIOSH Mining Reserch, Washington DC
Ruff T, Coleman P, Martini L (2011) Machine-related injuries in the US mining industry and priorities for safety research. Int J Inj Contr Saf Promot 18:11–20. https://doi.org/10.1080/17457300.2010.487154
Saravani AJ, Mehrshad N, Massinaei M (2014) Fuzzy-based modelling and control of an industrial flotation column. Chem Eng Commun 201:896–908. https://doi.org/10.1080/00986445.2013.790815
Sayadi A, Monjezi M, Talebi N, Khandelwal M (2013) A comparative study on the application of various artificial neural networks to simultaneous prediction of rock fragmentation and backbreak. J Rock Mech Geotech Eng 5:318–324
Setyadi H, Widodo LE, Notosiswoyo S, Saptawati P, Ismanto A, Hardjana I (2016) GIS modeling using fuzzy logic approach in mineral prospecting based on geophysical data. In: AIP conference proceedings, pp 1711(1).
Shi X, Lever PJ, Wang F-Y (1996) Experimental robotic excavation with fuzzy logic and neural networks. In: 1996 IEEE international conference proceedings robotics automation, IEEE
Shams S, Monjezi M, Majd VJ, Armaghani DJ (2015) Application of fuzzy inference system for prediction of rock fragmentation induced by blasting. Arab J Geosci 8:10819–10832
Somua-Gyimah G, Frimpong S, Nyaaba W, Gbadam E (2019) A computer vision system for terrain recognition and object detection tasks in mining and construction environments. In: SME Annual Conference
Sukkarieh S, Eduardo Mario N, D.-W. Hugh F. (1999) A high integrity IMU/GPS navigation loop for autonomous land vehicle applications. IEEE Trans Robot Autom 15:572–578
Tabaei M, Esfahani MM, Rasekh P, Esna-ashari A (2017) Mineral prospectivity mapping in GIS using fuzzy logic integration in Khondab area, western Markazi province, Iran. J Tethys 5:367–379
Thompson D (1999) Modern drilling and blasting technology at the Minntac mine. In: MINNBLAST 99, Duluth, Minnesota, USA, 1999, pp 79–96
Tiile RN (2018) Artificial neural network approach to predict blast-induced ground vibration, airblast and rock fragmentation vibration, airblast and rock fragmentation. Missouri University of Science and Technology
Torno S, Toraño J, Menéndez M, Gent M, Velasco J (2011) Mathematical and fuzzy logic models in prediction of geological and geomechanical properties of rock mass by excavation data on underground works. J Civ Eng Manag 17:197–206
Trivedi R, Singh TN, Mudgal K, Gupta N (2014) Application of artificial neural network for blast performance evaluation. Int J Res Eng Technol 3:564–574
Wang JS, Han S (2015) Feed-Forward neural network soft-sensor modeling of flotation process based on particle swarm optimization and gravitational search algorithm. Comput Intell Neurosci 1:1
Wei ZHOU, Cai QX, Chen SZ (2007) Study on dragline-bulldozer operation with variations in coal seam thickness. J China Univ Min Technol 17:464–466
Winstanley G, Corke PI, Roberts J (1999) Dragline Automation Implementation. In: Australian coal association research program project report, (C5003)
Yang H, Zhao S (2010) Prediction model for production indexes of a flotation circuit based on adaptive PCA and composite kernel support vector regression. In: 2010 International conference on biomedical engineering and computer science. IEEE, pp 1–4
Zhang N, Zhou K (2015) Mineral prospectivity mapping with weights of evidence and fuzzy logic methods. J Intell Fuzzy Syst 29:2639–2651
Zhongya Z, Xiaoguang J (2018) Prediction of peak velocity of blasting vibration based on artificial neural network optimized by dimensionality reduction of FA-MIV. In: Mathematical Problems in Engineering.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Ali, D., Frimpong, S. Artificial intelligence, machine learning and process automation: existing knowledge frontier and way forward for mining sector. Artif Intell Rev 53, 6025–6042 (2020). https://doi.org/10.1007/s10462-020-09841-6
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10462-020-09841-6