
Abstract
Two electrical mechanisms for manipulating particles and fluids, dielectrophoresis (DEP) and liquid dielectrophoresis (LDEP), are integrated in a microfluidic chip for creating the single-particle environment. The fluid is activated by LDEP with a 100-kHz/240-Vpp signal. When the single polystyrene bead approaches the trapping area, positive DEP force is utilized to capture and immobilize the bead. After trapping the bead, the process of liquid cutting and droplet creation is employed to create a droplet containing a single bead by LDEP with a 100-kHz/320-Vpp signal.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The analysis of single cell plays an important role in biological measurement and medical research. Conventional cell studies focus on the averages of cell properties and analyze the data from ensemble measurements. However, ensemble-averaged measurements can mask cellular heterogeneity (Altschuler and Wu 2010). For individual cellular behaviors, the average data of a population may not represent the majority of cells. In addition, cells use cell–cell communication (quorum sensing) to influence the states of neighboring cells via proteins, hormones, and molecules (Trosko and Ruch 1998; Diggle et al. 2007; Dow 2008). A single-cell environment is thus required to precisely study cellular behaviors.
The handling of fluids and particles is the main issue in most lab-on-a-chip (LOC) applications. Sample preparation, mixing, and transportation for further analyses can be achieved by fluid manipulation in a microfluidic chip. Microchannels, microvalves, and micropumps have been utilized to control the fluid (Kobel et al. 2010; Pal et al. 2004; Andersson et al. 2001). Controlling the particles in the fluid can facilitate sample reaction, separation, and detection processes. Optical, electrical, and magnetic approaches have been used for this purpose (Zhang and Liu 2008; Jang et al. 2009b; Shah et al. 2010). In many applications, the control of fluids and that of particles are treated as independent tasks, with a particular mechanism used for each. For instance, the electrical approach such as dielectrophoretic traps is used to capture single cell and micropumps are utilized to manipulate the fluid. Handling both fluids and particles by similar mechanisms would increase the portability and reduce the complexity of the chip.
Electrical methods are widely utilized to control fluids and particles. Many electrical approaches can be employed to manipulate fluids, including electrocapillarity (Prins et al. 2001), electro-osmosis (Duffy et al. 1999), electrowetting on dielectric (EWOD), and liquid dielectrophoresis (LDEP) (Pollack et al. 2000; Jones et al. 2001). For particle manipulation, dielectrophoresis (DEP) is the electrical mechanism for manipulating particles in fluids. Cho et al. (2007) demonstrated the concentration and binary separation of particles in a digital microfluidic chip by EWOD. Fan et al. (2008) manipulated particles by DEP and fluids by EWOD by modulating the frequency. The above two examples show that the electrical manipulation of fluids and particles can be integrated in a chip. However, few studies focus on the single particle and fluid manipulation by the similar approach.
The present study integrates two electrical approaches, LDEP and positive DEP (pDEP), to manipulate a single particle and fluid for creating a droplet containing a single particle. Identical frequencies are utilized for manipulating the fluid and particle simultaneously. First, the fluid is transported by LDEP. Then, a single particle is trapped in the trapping area by pDEP. The process of droplet creation is then employed to create a droplet containing the single particle. To demonstrate the proposed method, a droplet containing a polystyrene bead is created.
2 Theory
2.1 Circuit model for LDEP and EWOD
In a microfluidic system, EWOD and LDEP utilize electric forces to activate the fluid. The differences between EWOD and LDEP are the applied frequency and the fluid conductivity. EWOD uses direct current (DC) or low-frequency (<1 kHz) voltages and high fluid conductivity. The initial force that moves the liquid is the Coulomb’s force acting near the contact line. LDEP uses high frequency (>100 kHz) and low conductivity. The initial force moving the liquid is the electric ponderomotive force, where a non-uniform electric field moves the liquid. Figure 1 shows an RC circuit model of the proposed device. Let \(V = \text{Re} [(\sqrt 2 )Ve^{j2\pi ft} ]\), where f is the applied frequency and V is the root mean square value of the alternating current (AC) voltage. The electric field of the liquid (E w) can be represented as follows:
where f c is the critical frequency and g w is the fluid conductance. An examination of Eq. (1) shows that the critical frequency is:
where ε T , ε s, and ε w represent the dielectric constants of Teflon, SU-8 (epoxy-based negative photoresist), and water, respectively; ε 0 is the vacuum permittivity and σ w is the fluid conductivity; d 1, d 2, and d 3 are the Teflon thickness, the distance between two plates, and the SU-8 thickness, respectively; C is the total capacitance, consisting of the Teflon and SU-8 capacitances in series, described by:

Equivalent RC circuit model of the proposed device
According to Eq. (2), then \(f \ll f_{\text{c}} ,\,E_{\text{w}} \approx 0.\) The water acts like a perfect conducting medium so that the applied voltage is entirely concentrated in the dielectric and hydrophobic layers (the phenomenon is EWOD). When \(f \gg f_{\text{c}} ,\), the water acts like a dielectric medium and the applied voltage distribution is concentrated in the water, which can be treated as a capacitive voltage division (the phenomenon is LDEP). The electrical actuation force for the liquid can be calculated by the lumped parameter electromechanical model and the principle of virtual work (Woodson and Melcher 1968). The minimum actuation voltage of the liquid by LDEP and EWOD can be obtained from our previous studies (Chen et al. 2011).
2.2 DEP and modified Clausius–Mossotti factor
In a suspension medium, the dielectrophoretic force is exerted on a spherical particle. The force can be expressed as follows (Pohl 1978; Morgan and Green 2003; Jones 1995):
where a is the radius of the particle and E is the electric field; ∇E 2 is the gradient of the squared electric field; and \(\varepsilon_{\text{p}}^{*}\) and \(\varepsilon_{\text{m}}^{*}\) are the complex permittivities of the particles and medium, respectively. The complex permittivities of the particles and medium are frequency dependent and can be, respectively, described by:
where ε p, σ p, ε m, and σ m are the relative permittivities and conductivities of the particle and the medium, respectively, and f is the frequency. Equation (4) indicates that the magnitude and direction of the DEP force are affected by f. To simplify discussion, the frequency-dependent term in Eq. (4) can be represented by the Clausius–Mossotti (CM) factor, f CM:
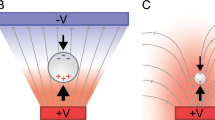
When the real part of the CM factor is greater than zero, the DEP force attracts particles toward high-field-strength regions, which are referred to as pDEP. In contrast, negative DEP repels particles from high-field-strength regions.
In Eq. (4), the gradient of the squared electric field, ∇E 2, is independent of frequency for a given electrode geometry and given magnitude of the applied signal. The DEP forces can be estimated by calculating the CM factor. However, both f CM and ∇E 2 are frequency dependent when the electrode is covered by a dielectric layer. ∇E 2 varies with frequency since the voltage across the dielectric layer varies with frequency. Therefore, the DEP force is determined by two terms, namely f CM and ∇E 2. The CM factor is modified as follows:
where f CM is the CM factor and Re(f) is the ratio of the voltage across the liquid to the applied voltage, f c is the critical frequency in Eq. (2), and g w is the fluid conductance.
3 Experiments
3.1 Electrode configuration and working principle of particle and liquid manipulation
Figure 2 shows the top view of the proposed electrode configuration. Three electrodes, a channel electrode, a DEP electrode, and a square electrode, are used for creating a droplet containing a single particle. The gap between each electrode is 15 μm. Channel electrode with a width of 200 μm and a length of 4 mm generates a virtual channel for the fluid. The fluid with particles flows over the channel electrode when channel electrode is activated. The semicircular area of the DEP electrode is utilized to trap a single particle. The radius of the semicircular area is 10 μm. The triangular area of the DEP electrode facilitates liquid splitting. The length of the square electrode is 400 μm. A droplet is created on the square electrode. The mechanism used to create a droplet containing a single particle is shown in Fig. 3. In the figure, yellow, red, and blue regions represent electrodes, particles, and the suspension medium, respectively. First, liquid is sandwiched between two plates. The medium with particles starts to move over the channel electrode, while the channel electrode is activated, (Fig. 3a). When a single particle approaches the trapping area of the DEP electrode (Fig. 3b, c), the semicircular area of the DEP electrode is utilized to trap and immobilize it (Fig. 3d). After the particle has been trapped, the triangular area of the DEP electrode and the square electrode is employed to activate and cut the liquid (Fig. 3e). Eventually, a droplet containing a single particle is created on the square electrode (Fig. 3f).

Top view of the electrode configuration

Diagram of mechanism of creating a droplet containing a single polystyrene bead. a Particles pass the trapping area, b a single particle moves toward the trapping area, c liquid approaches the edge of channel electrode, d particle is trapped and immobilized, e liquid is actuated and cut, and f droplet containing a single particle is created
3.2 Experimental setup
The experimental setup consists of a microscope, a charge-coupled device (CCD) camera, a video and image analysis system, a function generator, a power amplifier, and an oscilloscope. The microscope was used to observe the motion of the droplet and particles captured in the droplet. Images of the droplet were recorded by a CCD camera (at 30 frames per second) and subsequently transferred to the computer. A function generator (AFG3022, Tektronix) was used to generate the AC signal to drive the droplet on the electrodes. The AC signal was amplified by an amplifier (A-304, A.A. Lab Systems Ltd.) with a fixed gain of 40. The waveform of the AC signal generated by the AFG3022 function generator was observed with an oscilloscope (TDS2014B, Tektronix). A 0.5 μl droplet of deionized (DI) water was placed on the bottom substrate with a pipette (BRAND) and then covered with indium tin oxide (ITO) glass.
3.3 Fabrication
Figure 1 shows a cross-sectional view of the proposed device. The device consists of two parallel plates. The top plate (electrode) is a piece of indium tin oxide (ITO)-coated glass. The surface of the ITO-coated side of the glass was coated with 1,000-Å-thick Teflon as a hydrophobic layer. The bottom substrate is made of glass with individually addressable electrodes. 150-Å-thick and 650-Å-thick layers of chromium and gold, respectively, were evaporated by an e-beam evaporator and patterned using photolithography on the glass to create the bottom electrodes. The Au/Cr electrodes on the bottom substrate were coated with a 3-μm-thick layer of SU-8 photoresist to create a dielectric layer. SU-8 photoresist was coated with 1,000-Å-thick Teflon as a hydrophobic layer. Two pieces of aluminum foil with a thickness of 40 μm were used as spacers between the two plates.
4 Results and discussion
4.1 Creation of a single-particle environment
Figure 4 shows the experimental results of creating a single-particle environment. The procedure has three steps: (1) single particle trapping by pDEP, (2) particle immobilization, and (3) droplet creation. First, a 0.5 μl droplet was placed on the channel electrode and then covered with ITO glass. The gap between the two plates is 40 μm. Liquid with polystyrene beads with diameters of 15 μm moved over the channel electrode with a 100-kHz/240-Vpp signal (Fig. 4a, b). Based on Eq. (9), the ratio of the voltage across the liquid to the applied voltage is 0.18 at 100 kHz. The liquid acts like the dielectric medium. Therefore, the liquid is activated by LDEP. The liquid starts to move because the electric force overcomes the surface tension. Once a single-particle approaches the edge of the channel electrode, it is attracted to the semicircular area of the DEP electrode with a 100-kHz/240-Vpp signal. The trapped single bead is immobilized on the semicircular area since the DEP force and drag force are identical (Fig. 4c). To immobilize the particle, the applied voltage of the channel electrode is slowly decreased. In the experiment, it took around 5 s to lower the voltage from 240 Vpp to zero. If the voltage is decreased too fast, the advancing side of the liquid will quickly shrink from the channel electrode, which will result in a huge drag force upon the particle. The force pushes the particle away from the semicircular area. After particle immobilization, the process of droplet creation is used to create a droplet containing the single bead. The DEP electrode is applied with a 100-kHz/320-Vpp signal, and the channel electrode is turned off (Fig. 4d). If the channel electrode is not turned off, the LDEP force cannot pull the liquid from the channel electrode to the DEP electrode. When the liquid touches the edge of the square electrode, the DEP electrode is turned off, and then, the channel and square electrodes are activated with a 100-kHz/320-Vpp signal. The liquid on the DEP electrode is split by two LDEP forces from the channel electrode and square electrode. The gap between each electrode plays an important role in the liquid splitting. In our experiment, it is hard for the liquid splitting and droplet creation using large gap between each electrode. If the gap was larger than 20 μm, the front edge of the liquid at the triangular side of the DEP electrode could not touch the edge of the square electrode. Eventually, a droplet containing the single polystyrene bead is created on the square electrode (Fig. 4e).

Snapshots of procedure of creating a droplet containing a single particle. a A single particle moves toward the trapping area, b single particle arrives at the trapping area, c particle is immobilized, d liquid is actuated, and e droplet containing a single particle is created
4.2 Modified CM factor and optimized operating frequency range for particle trapping and liquid manipulation
Figure 5 shows the CM factor, the modified CM factor, and the ratio \({\raise0.7ex\hbox{${V_{\text{w}} }$} \!\mathord{\left/ {\vphantom {{V_{\text{w}} } V}}\right.\kern-0pt} \!\lower0.7ex\hbox{$V$}}\) between the voltage across the liquid and the applied voltage for frequencies from 1 kHz to 10 MHz. The CM factor and the ratio are calculated from Eqs. (7) and (9), respectively. The CM factor times the square of the ratio is equal to the modified CM factor. The parameters used in the calculation are as follows: 80, 2.5, 3, and 2.1 for the dielectric constants of DI water, the particle (Morgan and Green 2003), SU-8, and Teflon, respectively; 0.0001 and 0.02 S/m for the fluid and particle conductivities, respectively; 40, 3, and 0.1 μm for the gap, SU-8 thickness, and Teflon thickness, respectively. Based on Eq. (4), ∇E 2 is independent of the frequency for a given electrode geometry. The DEP force depends only on the CM factor. However, according to Eq. (1), the dielectric layer in the proposed device influences the DEP force within the liquid since the voltage across the liquid varies with frequency. This means that ∇E 2 varies with frequency. Therefore, the DEP force is determined from the CM factor and the ratio \({\raise0.7ex\hbox{${V_{\text{w}} }$} \!\mathord{\left/ {\vphantom {{V_{\text{w}} } V}}\right.\kern-0pt} \!\lower0.7ex\hbox{$V$}}\). From Fig. 5, the electric field within the liquid is close to zero when the frequency is below 3 kHz and the pDEP force disappears when the frequency is above 2.3 MHz. The modified CM factor indicates that the maximum DEP force is produced at frequencies from 60 to 660 kHz. In the experiment, frequencies of 1, 20, 60, 100, and 200 kHz were used to test the effect of frequency on particle trapping and immobilization. Based on Eq. (9), the modified CM factor is 0.001, 0.04, 0.09, 0.09, and 0.09 at frequencies of 1, 20, 60, 100, and 200 kHz, respectively. A particle can be trapped and immobilized in the trapping area at frequencies of 60, 100, and 200 kHz, but fails to be trapped at frequencies of 1 and 20 kHz. The pDEP force becomes relatively weak and extremely weak at frequencies of 1 and 20 kHz, respectively. If the pDEP force fails to overcome the drag force, the particle passes through the trapping area during particle trapping. In addition, the A-304 amplifier in the experiment has its 3-dB frequency at 350 kHz. Therefore, 200 kHz is the upper limit for trapping the particle. The optimized operating frequency range for trapping beads is 60–200 kHz. The optimized operating range generates the maximum modified CM factor based on Eq. (8). Identical frequencies were used for trapping the particle and manipulating the microfluid to simplify the experiments.

Variations in CM factor, modified CM factor, and the ratio \({\raise0.7ex\hbox{${V_{\text{w}} }$} \!\mathord{\left/ {\vphantom {{V_{\text{w}} } V}}\right.\kern-0pt} \!\lower0.7ex\hbox{$V$}}\) with frequency
4.3 Simulation of particle trapping and immobilization
Figure 6 shows the simulation results of the DEP effect on particle trapping and immobilization (cross-sectional view A–A′ in Fig. 2). The distribution of the electric field within the liquid was computed numerically by the finite element analysis software package COMSOL Multiphysics 3.4. First, the distribution of the electric field is derived from Laplace’s equation \(\nabla^{2} V = 0\). The strength of the DEP force can be obtained by solving for the gradient of the squared electric field \((\nabla^{2} E_{\text{rms}} = 0)\). The parameters for the simulation are as follows: 0.0001, 0.02, 1 × E6, and 1 × E−17 S/m for the electrical conductivities of the liquid, particle, ITO glass, and SU-8, respectively; 80, 2.6, 0.002, and 3 for the relative permittivities of the medium, particle, ITO glass, and SU-8, respectively. Figure 6a shows the distribution of the electric field. The largest electric field is in the semicircular area of the DEP electrode. Figure 6b shows the direction of DEP force. The trapping boundary is located on the edge of the channel electrode. At the edge of the channel electrode, the direction of the pDEP force is toward the semicircular area (as shown by the arrow), which pushes the particle to the center area of the DEP electrode (area with the largest electric field). In the center area of the DEP electrode, the direction of the pDEP force is downward (as shown by the arrow), which immobilizes the particle in the center area of the DEP electrode.

Simulation results of electric field and direction of the DEP force from cross-sectional view A–A′ in Fig. 2. a Distribution of electric field and b direction of DEP force
4.4 Other factors that affect creation of a droplet containing a single particle
In the experiment, the voltage, fluid conductivity, and electrode geometry affected liquid manipulation. During microfluidic manipulation, dielectric breakdown will damage the device. The dielectric breakdown voltages of SU-8 and Teflon vary with their respective thickness. In the experiments, the voltages across the SU-8 and Teflon layers were below the breakdown voltages of SU-8 (around 100 V/μm) (Melai et al. 2009) and Teflon (60 V/μm) (CRC Handbook of Chemistry and Physics), respectively. Another limitation of the study is fluid conductivity. For fixed physical dimensions and voltages, Joule heating per unit volume increases directly with the fluid conductivity. Therefore, high conductivity leads to high Joule heating in water. Electrolysis occurred in the experiment when the fluid conductivity exceeded 0.01 S/m. The electrode configuration also affects liquid manipulation. A larger contact line between the liquid and electrode generates a larger force upon the liquid (Jang et al. 2009a). Therefore, the triangular area of the DEP electrode is designed to generate a larger force for cutting the liquid and droplet creation. In the experiment, the drag force and the force due to the AC electrothermal (ACET) effect may influence the particle in the fluid. In the process of particle trapping and immobilization, the particle is very close to the electrode. Compared to the DEP force, the ACET force can be ignored (Ramos et al. 1998). In the process of droplet creation, the dominant force for the particle is the drag force since the fluid velocity is very high (around 1 mm/s). The drag force pulls the particle away from the semicircular area of the DEP electrode and takes it to the square electrode.
5 Conclusion
In this study, pDEP and LDEP were integrated to create a single-particle environment. Creating a single-particle environment by pDEP and LDEP contains three parts: (1) liquid transportation by LDEP, (2) single particle trapping and immobilization by pDEP, and (3) droplet creation by LDEP. The liquid transportation was achieved by the 100-kHz/240-Vpp signal. Eighteen percent of the applied voltage is across the liquid. The liquid acts like the dielectric medium. Therefore, the liquid is activated by LDEP. The optimized operating frequency range for trapping a single particle is 60–200 kHz, at which the pDEP force is largest. DEP force and drag force are two critical forces in the process of the single particle trapping. When a particle arrives at the gap between the channel electrode and DEP electrode, the pDEP force pushes it toward the semicircular area of the DEP electrode since it has the largest electric field. If the pDEP force cannot overcome the drag force, the particle will pass through the trapping area. Simulation results show that the pDEP force pushes the particle toward the trapping area and immobilizes the particle in the trapping area. ACET is insignificant in the trapping process since the particle is very close to the electrode. In the process of droplet creation, the triangular area of the electrode is utilized to create a droplet containing a single particle. In future studies, the mechanism for creating single-particle environment by DEP and LDEP will be utilized to create a single-cell environment for single-cell analysis.
References
Altschuler SJ, Wu LF (2010) Cellular heterogeneity: do differences make a difference? Cell 141:559–563
Andersson H, Wijngaart WVD, Nilsson P, Enoksson P, Stemme G (2001) A valve-less diffuser micropump for microfluidic analytical systems. Sens Actuators, B 72:259–265
CRC Handbook of Chemistry and Physics
Chen CH, Tsai SL, Chen MK, Jang LS (2011) Effects of applied frequency and fluid conductivity on minimum actuation voltage of aqueous liquids using EWOD and LDEP. Sens Actuators, B 159:321–327
Cho SK, Zhao Y, Kim CJ (2007) Concentration and binary separation of micro particles for droplet-based digital microfluidics. Lab Chip 7:490–498
Diggle SP, Gardner A, West SA, Griffin AS (2007) Evolutionary theory of bacterial quorum sensing: when is a signal not a signal? Philos Trans R Soc B 362:1241–1249
Dow M (2007) Diversification of the function of cell-to-cell signaling in regulation of virulence within plant pathogenic xanthomonads. Sci Signal 1(21):Pe23
Duffy DC, Schueller OJA, Brittain ST, Whitesides GM (1999) Rapid prototyping of microfluidic switches in poly(dimethyl siloxane) and their actuation by electroosmotic flow. J Micromech Microeng 9:211–217
Fan SK, Huang PW, Wang TT, Peng YH (2008) Cross-scale electric manipulations of cells and droplets by frequency-modulated dielectrophoresis and electrowetting. Lab Chip 8:1325–1331
Jang LS, Hsu CY, Chen CH (2009a) Effect of electrode geometry on performance of EWOD device driven by battery-based system. Biomed Microdevices 11:1029–1036
Jang LS, Huang PH, Lan KC (2009b) Single-cell trapping utilizing negative dielectrophoretic quadrupole and microwell electrodes. Biosens Bioelectron 24:3637–3644
Jones TB (1995) Electromechanics of particles. Cambridge University Press, Cambridge
Jones TB, Gunji M, Washizu M, Feldman MJ (2001) Dielectrophoretic liquid actuation and nanodroplet formation. J Appl Phys 89:1441–1448
Kobel S, Valero A, Latt J, Renaud P, Lutolf M (2010) Optimization of microfluidic single cell trapping for long-term on-chip culture. Lab Chip 10:857–863
Melai J, Salm C, Smits S, Visschers J, Schmitz J (2009) The electrical conduction and dielectric strength of SU-8. J Micromech Microeng 19:065012
Morgan H, Green NG (2003) AC electrokinetics: colloids and nanoparticles. Research Studies Press Ltd., Baldock
Pal R, Yang M, Johnson BN, Burke DT, Burns MA (2004) Phase change microvalve for integrated devices. Anal Chem 76:3740–3748
Pohl HA (1978) Dielectrophoresis. Cambridge University Press, Cambridge
Pollack MG, Fair RB, Shenderov AD (2000) Electrowetting-based actuation of liquid droplets for microfluidic applications. Appl Phys Lett 77(11):1725–1726
Prins MWJ, Welters WJJ, Weekamp JW (2001) Fluid control in multichannel structures by electrocapillary pressure. Science 291:277–280
Ramos A, Morgan H, Green NG, Castellanos A (1998) AC electrokinetics: a review of forces in microelectrode structures. J Phys D Appl Phys 31:2338–2353
Shah GJ, Veale JL, Korin Y, Reed EF, Gritsch HA, Kim CJ (2010) Specific binding and magnetic concentration of CD8+ T-lymphocytes on electrowetting-on-dielectric platform. Biomicrofluidics 4(4):044106
Trosko JE, Ruch RJ (1998) Cell–cell communication in carcinogenesis. Frontiers Biosci 3:d208–d236
Woodson HH, Melcher JR (1968) Electromechanical dynamics. Wiley, New York
Zhang H, Liu KK (2008) Optical tweezers for single cells. J R Soc Interface 5:671–690
Acknowledgments
This study was financially supported by the National Science Council (NSC 101-2628-E-006-006) and made use of shared facilities provided under the Program of Top 100 Universities Advancement funded by the Ministry of Education in Taiwan. The authors would like to thank the Center for Micro/Nano Science and Technology at National Cheng Kung University for access granted to major equipment throughout the duration of this study and for their general technical support.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Chen, CH., Chen, MK., Wang, MH. et al. Creation of single-particle environment by positive dielectrophoresis and liquid dielectrophoresis. Microfluid Nanofluid 16, 525–532 (2014). https://doi.org/10.1007/s10404-013-1244-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10404-013-1244-3