
Abstract
This paper presents an advanced 3D numerical methodology to reproduce the kinematics of slow active landslides, more precisely, to reproduce the nearly constant strain rate (secondary creep) and the acceleration/deceleration of the moving mass due to hydrological changes. For this purpose, finite element analyses are performed in a large area covering a long time-span (12 years), in order to exhibit different interacting slope movements. First, we perform a stability analysis using the shear strength reduction (SSR) technique with a Mohr-Coulomb failure criteria. It is done in order to compute factors of safety (FS) and to identify two different scenarios, the first one being stable (FS > 1) and the second one being unstable (FS < 1). In the studied test case, the Portalet landslide (Central Spanish Pyrenees), the first scenario corresponds to an initial stable configuration of the slope and the second one to an unstable excavated configuration. Second, taking the first scenario as an initial condition, a time-dependent analysis is performed using a coupled formulation to model solid skeleton and pore fluids interaction, and a simplified ground water model that takes into account daily rainfall intensity. In this case, a viscoplastic constitutive model based on Perzyna’s theory is applied to reproduce soil viscous behavior and the delayed creep deformation due to the excavation. The fluidity parameter is calibrated to reproduce displacements measured by the monitoring systems. Our results demonstrate that 3D analyses are preferable to 2D ones for reproducing in a more realistic way the slide behavior. After calibration, the proposed model is able to simulate successfully short- and medium-term predictions during stages of primary and secondary creep.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
Slow-moving landslides are a widespread geological hazard characterized by motion rates reaching several centimeters per year that can cause severe structural damages to buildings and infrastructures. They may also be precursors for faster and catastrophic mass movements. The capability to detect the spatial kinematical variability of slow landslide processes represents a fundamental source of knowledge to support the land management decision-makers in mountainous communities. Nowadays, remote sensing and space technologies such as Global Navigation Satellite Systems (GNSS) and radar interferometry (InSAR) allow to detect and monitor ground surface displacements with a high spatial density of measure points. These data can be used to depict temporal evolution and discriminate different surface slope movements in large areas with mm precision. In this context, phenomenological models and more particularly the physically based models, which are used to perform quantitative landslide motion forecast in order to assess the hazard and ultimately reduce the risk, must be performed in a more realistic and accurate way to manage the great amount of displacement data that can be used for validation. Therefore, a challenge resides in enlarging the scale of time-dependent studies from traditional one-dimensional infinite slope models (Corominas et al. 2005; Iverson 2000; Van Asch and Van Genuchten 1990) or two-dimensional sections (Conte et al. 2014; François et al. 2007; Tacher et al. 2005) to advanced three-dimensional models.
While three-dimensional effects in slope stability have been studied since the late 1960s, using both limit equilibrium methods and advanced numerical methods such as the finite element method (FEM) (Chen et al. 2001; Duncan 1996; Griffiths and Lane 1999; Leshchinsky and Huang 1992; Shen and Karakus 2013; Wei et al. 2009; Zhang et al. 2013; Zheng 2012), it is still not the practice to aboard landslide analysis in 3D. Most of published three-dimensional analyses focused on estimate stability condition using simplified and homogenized geometries, not reflecting real landslides cases and not focusing on prediction of the body kinematics of active landslides. François et al. 2007 address the numerical modeling of a real landslide motion in 3D in the case of the Triesenberg landslide (Liechtenstein) by splitting the studied area in three different domains. However, even the hydro-mechanical coupling was assessed in their study; the constant creep behavior picked up by continuous inclinometer was not reproduced through a modified Cam-Clay elastoplastic constitutive model. More recently, De Novellis et al. (2016) addressed the 3D modeling of the Ivancich landslide (Assisi, Central Italy) assuming a steady-state viscous flow (Newtonian fluid) solved through the incompressible Navier-Stokes differential equation. This rough fluid like behavior approximation is original in the case of slow landslide but more commonly used in the case of fast landslide propagation simulation like debris flow (Pastor et al. 2008; Quecedo et al. 2004).
Modeling real landslides is complicated, among other reasons, by (i) the high level of heterogeneity of the sliding masses and the presence of discontinuities, (ii) the complex hydro-mechanical coupling behavior affecting the landslide displacements, and (iii) the mechanical behavior of the solid skeletons. It follows that successful modeling of the landslide evolution can only be achieved if transient analysis takes into account (a) time-dependent loading history or hydrological condition changes as in the case of rainfall, (b) rate-dependent material properties as in the case of strain softening or weathering processes, and (c) creep mechanical behavior. Furthermore, in large-scale analysis, the derivation of reliable hydrological and constitutive models is a challenging task due to soil heterogeneity. From a numerical point of view, large-scale analyses are limited by large computation time that depends on solver and programming strategies.
In this work, an advanced numerical methodology to reproduce the 3D kinematics of slow active landslides, more precisely, the nearly constant strain rate (secondary creep) and the acceleration/deceleration of the moving mass due to hydrological changes, is presented. The studied test case is the Portalet landslide, located on the upper Tena Valley (Central Spanish Pyrenees). This is an area affected by several landslides composed mainly by slates and shales of Carboniferous and Devonian ages, which are characterized by intense weathering and high plasticity. Diverse regional and local studies about landslide motion and mechanism of this area have been published (García-Davalillo et al. 2014; Herrera et al. 2009a; b; 2013; 2011) offering a big amount of reliable input data and being well known both the subsurface structure and mechanical properties. The landslide was reactivated in summer 2004 after the toe of the slope was excavated to build a parking area for the Formigal ski resort. Exhaustive advanced monitoring campaigns based on main slip surface monitoring (inclinometer data) and surface displacement monitoring from total stations, GNSS campaigns, InSAR from multi-satellites (ERS, Envisat and TSX data), and ground based radar interferometry (GB-SAR) confirm that the landslide still being active and sensitive to rainfall.
Numerical models have been recently proposed to reproduce the kinematics of the Portalet parking landslide. The first one is a simple 1D infinite slope viscoplastic prediction model calibrated by surface displacements covering the time-span from 2004 to 2009 (Herrera et al. 2009b). This simple model is very sensitive to any variation of the parameters, which limits the conclusions that can be drawn from infinite slope models. The second one is a transient 2D (plane strain conditions) elastoplastic finite element model covering the time-span from 2004 to 2008 (Fernández-Merodo et al. 2008). In this study, the transient analysis is not able to reproduce measured displacements, i.e., no deformation was predicted during long dry time periods, indicating that viscous phenomena and delayed deformation due to creep plays a fundamental role in the landslide kinematics. The third one consists in a transient 2D (plane strain conditions) viscoplastic finite element model covering the time-span from 2004 to 2014 (Fernández-Merodo et al. 2014). After calibration, this last model can give excellent results for short-term and medium-term predictions, during stages of primary and secondary creep, i.e. at nearly constant strain rate. However, the 2D analysis restricts the scope of the study to the chosen critical section. All the proposed models use the same simplified groundwater model that takes into account recorded daily rainfall intensity.
This paper aims to take a step forward and reproduce the kinematic behavior of the Portalet parking landslide through a 3D hydro-geomechanical viscoplastic finite element model, enlarging the studied area to a real site scale analysis and covering a longer time-span from 2004 to 2016. We intent to evaluate if it is worth to perform more realistic 3D model of a landslide compare to simpler previous models in 1D and 2D. The result is that this finer numerical analysis exhibits and reveals new different, complex and critical interacting slope movements that were not well identified with previous monitoring records. It also gives a picture of the spatial extension of the mobilized mass, enabling the comparison between calculated surface displacements and high spatial density surface data given by advanced remote sensing monitoring systems. Moreover, the proposed methodology can be applied to other slow-moving landslides.
The Portalet landslide
Geomorphological and geological description
El Portalet (Fig. 1) is a mountain pass located in Central Spanish Pyrenees that communicates the Tena Valley (Huesca, Spain) and the Ossau Valley (Bern, France) by the road A-136, which also give access to the Formigal ski resort. In this structurally complex area, there are several composite landslides that were triggered after Pyrenean deglaciation and have been reactivated due to the constant erosive action of the Gallego River (Bixel et al. 1985; García-Ruiz et al. 2004; Notti et al. 2010). Two of these landslides develop at the southwest-facing hillside of Petruso Peak on slates and shales of Carboniferous and Devonian ages, which are characterized by an intense weathering and a high plasticity. Both moving masses are classified as roto-translational involving an area of 0.90 km2. They show superficial cracking and distinct ground displacements. These two paleo-landslides are called Portalet and Petruso landslide (zones 1 and 2 in Fig. 1).

Geomorphological and lithological sketch of the Portalet landslides area. The black box indicates the 3D modeling area of the parking landslide
In summer 2004, the excavation of the foot of the slope carried out to build a parking area for Formigal ski resort reactivated both landslides and generated new fissures, cracks, and a new small earth slide of around 0.06 km2 called the Portalet parking landslide (Fig. 1). The occurrence of this landslide forced the temporal suspension of the works and the closure of the road A-136. It also prevented the digging from being finished and part of the removed material was replaced at the foot of the landslide in order to hold the process. Immediately after this emergency measure was completed, built reinforcement was done to stabilize the hillside without interfering with the parking construction. These solutions were completed in the spring of 2006 and involved the re-profiling of the landslide toe, adding weight and building benches to stabilize the slope. Two small retaining walls and drainages were also built where the slip surface crops out. However, field observations and monitoring indicate that the landslide is still moving (Herrera et al. 2017).
Monitoring description
Multi-sensor monitoring techniques have been used to measure the surface and in-depth displacements of Portalet landslide since the occurrence of the reactivation in 2004. Before the stabilization solutions were carried out in the landslide, total station and inclinometric campaigns were performed (Herrera et al. 2009a). Seven total station campaigns were done in seven control points from December 2004 to March 2005 showing maximum total displacement of 51 cm in 102 days (1.8 m a−1). The inclinometers (Fig. 1), with readings from May to October 2005, detected the slip surface between 7 and 16 m depth. Inclinometer S-1, which is located in the center of the Parking landslide, detected the slip surface at 12 m depth and measured rigid motion of the mobilized material with a total displacement of 8 cm in 74 days (0.4 m year−1) before its total failure. After 2006, various surface monitoring techniques have been performed (Fig. 2). GB-SAR continuous recording were done during 47 days between October 2006 and November 2006 (Herrera et al. 2009b) showing a maximum displacement of 14 cm (1.1 m a−1). A total of 19 differential Global Navigation Satellite System (GNSS) campaigns on 129 benchmarks have been performed in two different networks, GNSSa and GNNSb, covering the span time from May 2006 to October 2015 and July 2010 to September 2015, respectively. Maximum mean velocities registered in the Parking landslide, for the entire period, are in the order of 0.31 m a−1. The maximum total displacement was detected at point P9, with a value of 2.97 m. Advanced DInSAR displacement measurements from ERS & ENVISAT and ALOS PALSAR satellites cover the periods 2001–2007 and 2006–2010, respectively (Herrera et al. 2013). In this work, we focus on the results obtained by using 13 TSX SAR images data acquired from April 2011 to November 2011 for qualitative comparison. Additionally to aforementioned techniques, horizontal extensometers were installed to measure surficial creep in two periods. The first one was measured from 28/07/2010 to 01/11/2011 (three extensometric lines) and the second one was installed in 25/09/2013 and is currently in use (just one line at the head scarp of the parking landslide). Measurements reveal that the head scarp is affected by the retrogressive effect of the landslide due to the loss of lateral confining pressure at a velocity of 0.113 m year−1 in the past 3 years and shows an increase of displacement’s rate when the water table increases.

Surface monitoring results using GB-SAR, D-GNSS (note that two different period campaigns are represented), and InSAR techniques
In order to understand groundwater level variation within the moving mass a set of four piezometers were installed in the upper, middle, and lower parts of the Portalet landslide. In this work, we focus on the piezometer located within the Portalet parking landslide SPz-4 (Fig. 1) which is located at 10.5 m depth and measured variations up to 1.7 m between July 2010 and November 2011. A rain gauge was also installed in Portalet landslide in 2012, although the data used for the hydrological model in this work is from the Sallent de Gallego meteorological station located at 1795 m.a.s.l. The reason to do so is because the meteorological station offers continuous daily rain recordings for all the studied period.
Landslide classification and activity
Typological classification is needed to characterize, in a preliminary way, the landslide behavior and subsequently select adequate mathematical, constitutive and numerical models able to represent the observations. The depleted volume of the parking landslide is of about 5 ⋅ 105m3, which corresponds to a medium-large magnitude landslide (Fell 1994). According to Cruden and Varnes movement and material type classification (Cruden and Varnes 1996), the Portalet parking landslide is an earth slide and, regarding the monitored displacements rate, it has a very slow velocity. Moreover, two kinematics patterns have been measured in the monitoring campaigns. The first one corresponds to a constant deformation rate, which has been identified as secondary creep, and the second one to an acceleration of the movement that is directly related to rainfall infiltration. The presence of superficial cracks and the high drainage capacity of the colluvium deposit located at the top permits water percolation which increments the interstitial water pressure of the materials underneath causing a rapid response of the landslide to daily rainfall. The classification system proposed by (Leroueil et al. 1996) gives an excellent explanation of the landslide state and history. Four stages of slope movements can be distinguished: the pre-failure stage, the post-failure stage, the reactivation stage, and the active landslide stage when a soil mass slides along one or several pre-existing shear surfaces. The kinematic patterns of the active Portalet paleo-landslide previously described can perfectly fit in this last stage, where the excavation of the toe in summer of 2004 and the subsequent local Parking failure correspond to an occasional reactivation event.
Three-dimensional modeling
Conceptual model
Geometry, mechanical behavior of the materials and boundary, load, and initial conditions must be defined in order to obtain a representative conceptual model able to reproduce the kinematics of a real landslide. To do so, a big amount of reliable input data is required. The selected extension to model the Portalet parking landslide is sketched by a black contour box in Fig. 1. The definition of a 3D lithostratigraphic geometry is an important and demanding task that we have performed using the specialized GiD pre-processor software (CIMNE 2009). The 3D geometry and profiles before parking excavation are outlined in Fig. 3. Four lithotechnical levels or units are represented by stacked volumes. The upper level (L1) is formed by a colluvium Quaternary deposit. The immediately below level (L2) is composed of silt and sandy clay with gravel size fragments which derives from the weathering of Paleozoic shale bedrock. Under the latter, a level of fragmented slate with a lower degree of weathering is found (L3). Finally, the substrate (L4) is mainly composed by non-altered slate and occasionally by boards of tectonized limestone. We have rigorously defined the 3D stratigraphic geometry using P1, P2, and P3 cross-section profiles, which were interpreted from electrical (ETM) and seismic (STM) tomography and borehole lithostratigraphic column data. Profile P2 coincides with the cross section analyzed in the previous published 1D and 2D models (Fernández-Merodo et al. 2008; Fernández-Merodo et al. 2014; Herrera et al. 2009b). The topography of the initial configuration (before parking construction) is taken from a 5-m resolution digital elevation model (SITAR 2004) and current topography was obtained by a 25-m resolution DEM (IGN 2014).

3D lithostratigraphic geometry of the Portalet parking landslide before parking excavation (initial configuration) and cross sections P1, P2, and P3
The geomechanical characterization of the materials was carried out through in situ test, including standard penetration test and cylindrical hydraulic cell, and laboratory tests which consisted in identification, direct shear, and unconfined compression tests of undisturbed samples (ARCO-TECNOS 2010; Oviedo-University 2011). The mean geomechanical properties of each unit are presented in Table 1. Both of the stratigraphy and the material parameters have been kept equal for all the numerical simulations of the work in hand, taking into account the following assumptions: (1) the materials have a perfectly plastic behavior following the Mohr-Coulomb criterion, (2) the flow is associative, (3) no strain softening or weathering processes are considered, (4) viscoplastic behavior of the altered slate soil is taken into account in the transient analysis, and (5) the bedrock intact slate (L4) material (considered completely dry) and faults do not influence the landslide behavior. Concerning the associative flow rule it has been checked that dilatancy angle does not have very much effect on the final 3D computed safety factor and failure mechanism for the chosen mesh discretization (Zienkiewicz et al. 1975). Precise influence of mesh discretization and dilatancy has been reported by (Tschuchnigg et al. 2015) in the case of a homogeneous 2D steep slope. Moreover for the proposed time-dependent analysis and chosen mesh discretization, the effect of dilatancy on computed displacement is also negligible. Ground water position is obtained from piezometric and borehole data along the P2 profile (SPz-4 and S-1 located in Fig. 1) and we have extrapolated it to the lateral sides.
Concerning boundary conditions, we have considered the ground surface of the slope unconstrained, fixed to zero the perpendicular displacements (x, y) at the lateral surfaces and prescribed to zero all displacements (x, y, z) at the base. We have considered gravity load only and no local countermeasures to stabilize the road, as retaining walls or rock fill overburden in the cutting road, have been included in the model.
Numerical modeling description
Components of the model
We consider three main ingredients to reproduce the kinematic behavior of the Portalet parking landslide by a numerical analysis: (i) a mathematical model that describe the main physical processes taking place within the considered materials (hydro-geomechanical coupling), (ii) a numerical model to solve the mathematics equations (finite element discretization), and (iii) a constitutive model (rate-dependent plasticity-viscoplasticity). We use the GeHoMadrid (GHM) finite element code (Fernández-Merodo 2001; Mira 2002) for the fully coupled hydro-mechanical analysis. This code implements the solid skeleton and the pore fluids interaction by the so-called u − p w formulation (Zienkiewicz et al. 1999) which expresses the governing balance conservation partial differential equations due to Biot in terms of only two variables: the displacements of the solid matrix (u) and the pressure of the pore fluid (p w). Partial saturation above the phreatic surface has not been considered.
Concerning the mechanical behavior of the materials, we consider two constitutive models. For the stability analysis, we use an elastoplastic constitutive model with a Mohr-Coulomb failure criterion. From a computational point of view, to guarantee the quadratic convergence of the stress update algorithm, we apply a smooth hyperbolic approximation of the Mohr-Coulomb yield criterion (Abbo and Sloan 1995), an implicit algorithm (Ortiz and Popov 1985) and a consistent tangent matrix (Simo and Taylor 1985). For the time-dependent analysis, we consider a viscoplastic model based on Perzyna’s theory (Perzyna 1966) in order to reproduce creep behavior. This model is a modification of classical plasticity wherein viscous-like behavior is introduced by a time-rate flow rule employing a plasticity yield function (Mohr-Coulomb in this case). Further information of the models used in this work can be found in Fernández-Merodo et al. (2014).
Model strategy
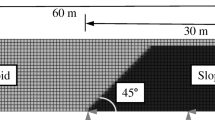
The methodology proposed in this work for the 3D landslide model consists of three successive analyses, once selected the appropriate size of the mesh. In finite element models, the element size is a critical issue which closely relates to the accuracy of the simulation while directly determines their complexity level and thus requested computing time. We have performed the numerical simulations with four different size 3D mesh discretization (Fig. 4). All of them are coarser in the bedrock slate and finer in the upper materials and are formed by quadratic tetrahedron elements which are composed by ten nodes for the displacements and four nodes for the pore pressures (H10P4).

3D finite element meshes different size. Nodes A, B, and C are located for later comparisons
The first step is to carry out a stability analysis whose objective is identify two different landslide scenarios by means of the safety factor (FS), the first one being stable (FS > 1) and the second one being unstable (FS < 1). The FS is the ratio between the maximum shear strength allowed to prevent failure τ max and the shear strength a soil is exposed to τ (Eq. 1) or, in other words, the ratio between the forces resisting movement and the forces driving movement. To compute the FS, we have used the shear strength reduction technique (SSR) (Dawson et al. 1999) jointly with the elastoplastic Mohr-Coulomb failure criterion. The SSR technique consists in reducing the shear strength in terms of soil friction angle Φ and cohesion c in steps until collapse is reached (Eqs. 2 and 3).
We have adopted a non-convergence criterion of the Newton-Raphson non-linear algorithm, with a normalized unbalanced force limit of 10−4, for the failure criteria. Safety factors are computed on the initial and excavated configurations taking into account the influence and sensitivity to the friction angle of the altered slate soil, whose range is estimated to be between 24 and 20°. All the other material parameters have been kept constant through the simulations. Ground water level position is also a critical factor on the slope stability. According to piezometric and borehole data along the P2 profile (SPz-4 and S-1 located in Fig. 1), ground water level is 6.5 m deep, which we have interpolated laterally and kept constant through the stability analysis. The bedrock intact slate (L4) is considered completely dry. The hydrostatic condition and adopted fixed 3D pore water pressure contours are sketched in Fig. 5.

Pore pressure contours
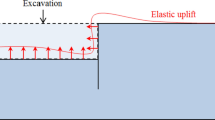
The purpose of this first analysis is to find a value of the friction angle resulting on a stable (FS > 1) initial configuration and unstable (FS < 1) excavated configuration. Hereafter, the second step consists of verifying the results of the stability analysis by simulating the excavation process progressively through a static analysis jointly with the elastoplastic Mohr-Coulomb failure criterion. Finally, a time-dependent analysis is carried out to simulate the landslide kinematics from 07/2004 to 31/01/2016, which corresponds to the period from the parking excavation up to the last recorded measurement. The initial condition at 07/2004 corresponds to a hydrostatic and geostatic equilibrium state in the initial configuration, and the excavation process is simulated instantly, in the first time step, giving a non-stable excavated configuration. Two factors for the time-dependent behavior are taken into account: the hydrological changes due to rain infiltration and the delayed viscoplastic behavior of the altered slate material. No strain softening and weathering processes are considered to simplify the problem.
The hydrological changes due to rainfall are prescribed as pore pressure changes derived from an external simplified hydraulic model where water table depth is computed in a 1D soil column directly from daily recorded rainfall intensity. We have considered that changes in groundwater level are directly proportional to the rainfall intensity and inversely proportional to the porosity of the material. Even if it is not strictly a consolidation process, pore pressure evolution in the landslide can be approximated by the Terzaghi’s one-dimensional consolidation theory assuming that ground water level position remains parallel to the initial prescribed one. Results of this simple ad hoc 1D ground water modeling are prescribed at the contact soil-colluvium for the 3D transient analysis. This model was firstly proposed by Herrera et al. (2009b) and applied in Fernández-Merodo et al. (2014). See these paper for details of the model. Later, similar simple approximations have been used for predicting rainfall-induced mobility of active landslides (Conte et al. 2016). Figure 6 shows computed and measured water table depth. Error sources of this hydraulic model include effects from the distance (8 km) to the Sallent de Gállego rain gauge station and evaporation, runoff, and snow melting phenomena that are not considered by the model.

Computed and measured water table depth (red and blue lines respectively in the upper panel), and rainfall intensity (gray line in the lower panel) from 27/07/2010 to 31/01/2016
The delayed viscoplastic behavior of the altered slate material is taken into account using a viscoplastic model based on Perzyna (1966). This model reproduces the observed creep behavior and enables to reproduce numerically the excavation process even in the cases were the slope is not stable in the perfectly plastic or limit equilibrium sense (FS < 1).
Results
Stability analysis and excavation simulation
We have computed factor of safety with the SSR technique of the 3D lithostratigraphic geometry (FS3D) on the initial and excavated configurations for the four different meshes taking into account the uncertainty of the friction angle of the weathered slate soil (Φ soil), which was estimated to be between 20° and 24°. Results of the stability analysis are summarized in Table 2.
It can be observed that the friction angle of the altered slate soil has an important influence on the stability analysis; stability decreases when friction angle decreases. Moreover, excavated configuration is less stable than initial configuration. Furthermore, when this friction angle is equal to 20°, the initial configuration is stable (FS > 1), whereas for the excavated configuration, failure is reached (FS < 1), with the exception of the finer mesh (MESH 4) were Φ = 22° also leads to an unstable state. These tendencies were also observed in previous published 2D analysis (Fernández-Merodo et al. 2014).
If we compare the FS3D values given in Table 2 with the 2D results (FS2D) of previous works, it is observed that FS3D values are higher in the case of the initial configuration, which is in accordance with observations made in previous published studies, Duncan (1996), and references therein. It is produced by the fact that 3D analysis takes into account the shear strength along the sides and the back scarp while in 2D plain strain analysis it is implicitly assumed that the failure surface is infinitely wide (Stark and Eid 1998). Therefore, previous FS2D results of the Portalet parking landslide were more conservative.
In the case of the excavated configuration, comparison of FS3D vs FS2D does not fulfill this accepted rule. Then FS3D are lower than the 2D ones, indicating that something else is happening during excavation. This will be clarified in the following mesh dependency analysis.
Figure 7 depicts total displacement contours at failure and associated FS for the different adopted meshes and the same soil friction angle (Φ soil = 20°). In the initial configuration, the mobilized mass is similar for all the meshes and the FS reduces slightly with the finer meshes. However, in the excavated configuration, mesh size has an important influence on the stability analysis. Two different surfaces of rupture appear: a larger deep failure mechanism at the center left of the model and a smaller shallow failure at the right where the topography is steeper. They will be referred as global and local failure respectively through this paper and their representative profiles as global and local profiles (Fig. 5). In order to better understand how these two “competitive” failures behave from a numerical point of view, by means of the mesh size, Fig. 8 plots the total displacement versus the trial factor of safety FS at two representative points A and B (located in Fig. 4) in the case of Φ soil = 20°. Node A belongs to the global failure body and node B belongs to the local failure body, being site at the maximum deformation zones calculated with the static FS analysis. Note that failure is reached when the total displacement increases exponentially in Fig. 8. For the coarse mesh (MESH 1) the critical failure is the global failure with an associated factor of safety equal to 0.96. Even though the global failure corresponds to the same deeper failure mechanism detected in previous 2D analysis (Fernández-Merodo et al. 2014), the FS3D of MESH 1 is smaller than FS2D calculated in that work, which does not fulfill the general stated by Duncan 1996. This is due to the fact that the profile analyzed in the 2D work was not the most critical section. For MESH 2, there is nearly a draw between the failures, although the local one prevails with an associated factor of safety equal to 0.95. For the finer meshes, the local failure clearly prevails among the global one with associated factor of safety equal to 0.93 (MESH 3) and 0.92 (MESH 4). In the cases where the local failure dominates, FS3D is lower than FS2D because they are representative of different surfaces of rupture.

Influence of the mesh size on slope stability. Total displacement contours at failure and associated FS3D for Φ soil = 20°

Influence of the mesh size on slope stability. Total displacement versus trial factor of safety at node A (global failure) and node B (local failure) for friction angle of the weathered slate soil Φ soil = 20°
Mesh size has an important influence not only on the stability analysis but also on the consumed CPU time for the computation. Figure 9 plots FS of the excavated configuration for friction angle equal to 20° and consumed CPU time versus number degrees of freedom (CPU time using a single 3.33-GHz processor with 24 Gb of RAM). Note that CPU time is also a critical issue for the following time-dependent analysis section.

Influence of the mesh size on slope stability. Factor of safety FS and CPU time versus number degrees of freedom
Mesh dependency is not a good feature in numerical simulation, but a good compromise between accuracy and consumed CPU time could be achieved with MESH 2. Even though MESH 2 is slower than MESH 3 for this analysis due to convergence speed issues, we have checked that for the time-dependent analysis MESH 2 is much faster. In the following, all computations are done using MESH 2 with which global and local failure can be analyzed.
Influence of friction angle of the altered slate soil on the stability analysis of the optimal mesh can be inspected in Figs. 10 and 11. Figure 10 plots the horizontal displacement of points A (global failure) and B (local failure) versus the trial FS for different values of the weathered slate soil friction angle ranging from 24° to 20°. Again, it can be observed that the friction angle of the altered slate soil has an important influence on the stability analysis. Furthermore, when Φ soil = 20° the initial configuration is stable (FS > 1), whereas for the excavated configuration failure is reached (FS < 1). Note that failure is reached when the horizontal displacement increases exponentially. Higher values of the friction angle yield stable condition for both configurations.

Influence of friction angle on slope stability: horizontal (direction y) displacement of nodes A and B versus trial factor of safety

Influence of friction angle value on slope stability for initial and excavated configurations: total displacements and equivalent plastic strain contours at failure and associated factors of safety (FS). Note scales from initial and excavated configuration are different. The most critical profiles of “global” failure and “local” failure are also shown, see location at the upper right
Figure 11 presents the respective total displacement and equivalent plastic strain (second invariant of the plastic strain tensor) contours at failure and associated FS for the initial and excavated configuration. Contours are also plotted on two cuts defined along the global and local profiles. As it was already mentioned, the failure mechanism along global profile agrees with previous 2D plain strain analysis (Fernández-Merodo et al. 2014), although the critical section for the excavated configuration does not coincide with the 2D profile chosen in previous works.
The stability analysis of the selected mesh yields an important result: the excavation can only be completed when the friction angle of the weathered slate soil is higher than 20°. It has to be underlined that computed location of the rupture surface agrees fairly well with field observations. The observed main scarps are located at the same position on the upper part of the slope and the observed bulging in the parking area at lower eastern part of the slope is nearby the local failure, as it shown in Fig. 12. Moreover, if we compare these results with field displacement records presented in Fig.2, it can be seen that the spatial distribution of the deformation and extension is very well cached.

Map showing the equivalent plastic strain contours and the total displacement at failure for the excavated configuration considering a friction angle of the weathered slate soil Φ = 20°. Note that the scale color is different from Fig. 11
The stability analysis result has been verified with a numerical simulation of the excavation. Starting from the initial configuration in equilibrium (geostatic and hydrostatic equilibrium), the excavated material is progressively removed using a static analysis. Figure 13 shows the equivalent plastic strain and the displacement contours at the end of this excavation process for the different friction angle values. Note that for Φ soil = 24° and 22°, the excavation can be completed and both the plastic strain and the displacements are small. On the other hand for Φ soil = 20°, failure occurs when 91% of the excavation is completed. In this case, plastic deformation develops along a shear surface and the displacements contour indicates that the excavation triggers a new landslide. A slight deformation at the local landslide location can be seen. In the profile depicted in the upper left side of Fig. 13, it can be appreciated that, according to the computations, the mobilized mass slides along this shear surface with a typical rigid-body motion (translational slide).

Total displacement contours and equivalent plastic strain after excavation (3D and “global” profile views) in the numerical simulation of the excavation
Time-dependant analysis
The election of the altered slate soil friction angle is a key point in the proposed methodology. This angle is deduced from the previous stability analysis as 20°, which correspond to a stable state in the initial configuration and an unstable state in the excavated configuration. We have computed the time-dependent behavior for eight fluidity values. The introduction of viscoplastic behavior (instead of elastoplastic) in the time-dependent analysis model implies that the parking could be constructed without the total failure of the slope, even if the excavated configuration is not in equilibrium. This can be seen in Fig.14 where time series of total displacement at nodes C and B, corresponding to the maximum global and local failure deformations respectively, are plotted for three different fluidity parameters. Deformation is delayed in time and tends to infinity due to the failure state. Fluidity parameter controls the velocity of the delayed behavior (if it increases so does the displacement) and rain infiltration accelerates the process. It can be seen also that the local failure (node B) moves faster than the global one (node C).

Computed total displacement from 01/07/2004 to 31/01/2016 for different values of fluidity parameter (in Pa−1 s−1) with and without rain action at node C (maximum global failure displacement) and node B (maximum local failure displacement)
As it has been done in previously published 1D and 2D analyses, the 3D computed displacement can be compared with measured displacements. This comparison can be done in space (using space distributed monitoring) and in time (using time series).
Spatial distribution and direction of the motion between modeled and monitored displacements can be visually checked comparing Fig. 15a, where displacement vectors direction and module of the model are map out, and Fig. 2, where velocity vectors of different monitoring techniques are plotted. It can be seen the kinematics of the global landslide is well cached in the modeled studied area. If we compare the evolution of displacements in time, we find that the trends of the modeled and monitored time series are very similar. In Fig. 16, GNSS horizontal time series displacement measurement of points P9, P10, and P30 (located in Fig. 15b) are compared with 3D computed horizontal displacement at node C. A good fit for the global failure is obtained using a fluidity parameter equal to 5 ⋅ 10−9 Pa−1 s−1. This value does not differ very much from the value used in the previous 2D analysis 7 ⋅ 10−9 Pa−1 s−1.

a Computed vectors of displacement across the landslide for the model with a fluidity parameter equal to 5 · 10−9 Pa−1 s−1. b Observed vectors of displacement in the modeled domain, which correspond to the GNSSa monitoring campaign (see Fig. 2). Nodes B and C are also plotted; they correspond to the location of maximum displacements computed for all the viscoplastic models of the local and global failure, respectively

Computed (from 01/07/2004 to 31/01/2016) and measured total displacement
We have attempted to perform a quantitative analysis over the modeled domain by analyzing the difference between modeled and monitored displacements (both vector directions and modulus) at 18 GNNS measure points (GNSSa in Figs. 2 and 15b) for eight different fluidity values, using a window of time from 31/05/2006 to 01/07/2015. Regarding vectors directions, all viscosity models provide a very good fit. Table 3 shows the values of the angles obtained by subtracting the modeled azimuths α model from the observed ones α obs. However, a quantitative spatial analysis of the vector modulus, which would have allowed to choose the best fitting fluidity model, is not useful. The reason is that, even though we have designed an accurate and detailed 3D lithostratigraphic model, the influence of small scale elements, such as the confining effect of the road and retaining walls or local heterogeneities of the geological structure or piezometric level, are not taken into account. We have checked during the modeling process that this small variations can impact the magnitude and the spatial distribution of the displacements, although the general mechanisms of failure is always well cached. Moreover, the magnitude of displacements at the local failure is not realistic, which is probably due to the fact that we have not modeled local countermeasures to stabilize the road as retaining walls or rock fill overburden in the cutting road. No long-time monitoring is available at the local failure, as it was identified after the present study. It has to be mentioned that this local failure affects directly the road and it is planned that public services in charge of its maintenance will increase in a nearby future the countermeasures at its location.
Discussion and conclusions
In this work, an advanced numerical methodology to reproduce, in a 3D context, the kinematics of large active creep landslides, more precisely, the nearly constant strain rate and the acceleration/deceleration of the moving mass due to hydrological changes has been presented. This methodology is capable to detect the spatial kinematical variability of slow landslide processes. It can represent a fundamental source of knowledge to support the land management decision,and take advantage of the great spatial density of surface displacement data from advanced remote sensing techniques that can be used for validation. The methodology is applied in the Portalet parking landslide, enlarging the scope of previous 1D and 2D published works to a more real 3D site scale study. We have performed the calibration of the time-dependent model using displacement monitoring given by GNSS. We have also used intensive and wide surface data from other remote sensing techniques, such as A-DinSAR and GB-SAR, and inclinometric data for comparison. Conclusions arise naturally from the comparison between previous 2D model results and the one in hand:
-
For the initial configuration (before parking excavation), the most critical section obtained in the FS3D analysis coincides with profile P2, which was the one analyzed in previous 2D works (Fernández-Merodo et al. 2008; Fernández-Merodo et al. 2014; Herrera et al. 2009b). Furthermore computed FS3D is greater than the one calculated in 2D by Fernández-Merodo et al. 2014. This result is in concordance with previous works (Duncan 1996 and references therein) which state that, in general, 2D analysis lead to conservative factors of safety. This can be explained because the 3D analysis takes into account the shear strength along the sides and the back scarp while in 2D plain strain analysis it is implicitly assumed that the failure surface is infinitely wide (Stark and Eid 1998). Moreover, if 3D effects are neglected, back analysis of slope failures will overestimate the shear strength of the materials involved (Duncan 1996). Even though, in this case, the calibrated friction angle coincides with the one obtained in previous 2D analysis, which has a value of 20°.
-
In the excavated configuration (after parking construction), two different and “competitive,” from a numerical point of view, failures mechanisms appear: a larger deeper failure at the centre left of the model (which corresponds to the same surface of rupture detected in the 2D analysis of the aforementioned previous works) and a smaller shallow local surface of rupture at the south-east. Slow-moving earth landslides are not perfect homogeneous bodies that move jointly, so 3D models let us analyze the interaction of differential movements or failures that occur within the same landslide. A withdrawal of the FS computation using FEM and SSR technique is that the calculations stop when the first failure is reached, complicating stability analysis when several different slope failures occur in the same finite element mesh.
-
For the excavated configuration, the most critical profile of the global failure is not the one that was taken for previous 2D works, but it develops at the west of it. Making a 3D model prevents from testing different profiles to find the most critical one.
-
The 3D time-dependant model has overestimated the amount of movement of the small local failure, but it is probably due to the fact that the confining action of the retaining walls and the road, and drainage have not been taken into account.
-
3D analysis of this landslide has given us a picture of the spatial extension of the mobilized mass. Almost all landslides exhibit 3D features and this analysis has reproduced the deformations monitored at the surface of the landslide by GB-SAR, GNSS, and DInSAR.
-
A comparison in time between computed time series and recorded ones (with GNSS) has let us calibrate the fluidity parameter that controls the viscoplastic behavior of the soil and that has been estimated in 5 ⋅ 10−9 Pa−1 s−1. This value is smaller than the calculated in the 2D previous work.
It has been proven that 3D analyses are preferable to 2D ones to reproduce in a more realistic way Portalet parking landslide behavior. We consider it is a quite general conclusion for any other similar slow velocity land slide. After calibration, the proposed model is able to give successful, both in space and time domain, short-term and medium-term predictions during stages of primary and secondary creep. Long-time predictions remain uncertain due to unpredictable water table changes (although various rainfall scenarios could be analyze for a probabilistic risk assessment) and difficult quantification of tertiary creep. Limitations of the model have also been presented in this work. For local site investigations (normally for engineering solution porpoises), complex 3D forward models are suited when a high amount of data is available and quantitative analysis will be limited by the relation between the resolution of modeled elements and the scale of the studied area.
A future challenge for 3D landslides investigations (having demonstrate that we are able to perform the forward model) is to apply inversion techniques using the high spatial density surface data given by advanced remote sensing monitoring systems. This will allow us to explore the different valid solutions and possible future scenarios, which is particularly interesting for valley scale analysis where exhaustive geotechnical investigations are difficult to encompass.
References
Abbo A, Sloan S (1995) A smooth hyperbolic approximation to the Mohr-Coulomb yield criterion. Comput Struct 54:427–441
ARCO TECNOS SA (2010) Sondeos en alrededores de la estación de Formigal (Huesca). Technical Report for Instituto Geológico y Minero de España. Control Remoto SudoedorisProject (in Spanish)
Bixel F, Muller J, and Roger P (1985) Carte géologique du Pic du Midi d’Ossau et haut bassin du río Gállego, 1:25.000
Chen Z, Wang J, Wang Y, Yin J-H, Haberfield C (2001) A three-dimensional slope stability analysis method using the upper bound theorem part II: numerical approaches, applications and extensions. Int J Rock Mech Min Sci 38:379–397
CIMNE G (2009) The Personal Pre and Post Processor, International Center for Numerical Methods in Engineering, Barcelona, 2009
Conte E, Donato A, Troncone A (2014) A finite element approach for the analysis of active slow-moving landslides. Landslides 11:723–731
Conte E, Donato A, Troncone A (2016) A simplified method for predicting rainfall-induced mobility of active landslides. Landslides 1-11:2016
Corominas J, Moya J, Ledesma A, Lloret A, Gili JA (2005) Prediction of ground displacements and velocities from groundwater level changes at the Vallcebre landslide (Eastern Pyrenees, Spain). Landslides 2:83–96
Cruden DM and Varnes DJ (1996) Landslides: investigation and mitigation. Chapter 3—landslide types and processes, Transportation Research Board special report, 1996
Dawson E, Roth W, Drescher A (1999) Slope stability analysis by strength reduction. Geotechnique 49:835–840
De Novellis V, Castaldo R, Lollino P, Manunta M, Tizzani P, (2016) Advanced three-dimensional finite element modeling of a slow landslide through the exploitation of DInSAR measurements and in situ surveys. Remote Sens 8(8):670
Duncan JM (1996) State of the art: limit equilibrium and finite-element analysis of slopes. J Geotech Eng 122:577–596
Fell R (1994) Landslide risk assessment and acceptable risk. Can Geotech J 31:261–272
Fernández-Merodo JA (2001) Une approche à la modélisation des glissements et des effondrements de terrains: Initiation et propagation. PhD, École Centrale Paris
Fernández-Merodo J, Herrera G, Mira P, Mulas J, Pastor M, Noferini L, Me-catti D, and Luzi G (2008) Modelling the Portalet landslide mobility (Formigal, Spain). International Environmental Modelling and Software Society (iEMSs), 2008
Fernández-Merodo JA, García-Davalillo JC, Herrera G, Mira P, Pastor M (2014) 2D viscoplastic finite element modelling of slow landslides: the Portalet case study (Spain). Landslides 11:29–42
François B, Tacher L, Bonnard C, Laloui L, Triguero V (2007) Numerical modelling of the hydrogeological and geomechanical behaviour of a large slope movement: the Triesenberg landslide (Liechtenstein). Can Geotech J 44:840–857
García-Davalillo JC, Herrera G, Notti D, Strozzi T, Álvarez-Fernández I (2014) DInSAR analysis of ALOS PALSAR images for the assessment of very slow landslides: the Tena Valley case study. Landslides 11:225–246
García-Ruiz J, Chueca J, Julián A (2004) Los movimientos en masa del Alto Gállego. Geografía Física de Aragón Aspectos generales y temáticos 142-152:2004
Griffiths D, Lane P (1999) Slope stability analysis by finite elements. Geotechnique 49:387–403
Herrera G, Davalillo J, Mulas J, Cooksley G, Monserrat O, Pancioli V (2009a) Mapping and monitoring geomorphological processes in mountainous areas using PSI data: Central Pyrenees case study. Nat Hazards Earth Syst Sci 9:1587–1598
Herrera G, Fernández-Merodo J, Mulas J, Pastor M, Luzi G, Monserrat O (2009b) A landslide forecasting model using ground based SAR data: the Portalet case study. Eng Geol 105:220–230
Herrera G, Notti D, García-Davalillo JC, Mora O, Cooksley G, Sánchez M, Arnaud A, Crosetto M (2011) Analysis with C-and X-band satellite SAR data of the Portalet landslide area. Landslides 8:195–206
Herrera G, Gutiérrez F, García-Davalillo J, Guerrero J, Notti D, Galve J, Fernández-Merodo J, Cooksley G (2013) Multi-sensor advanced DInSAR monitoring of very slow landslides: the Tena Valley case study (Central Spanish Pyrenees). Remote Sens Environ 128:31–43
Herrera G, Fernández-Merodo J, Béjar-Pizarro M, Allasia P, Lollino P, Lollino G, Guzzetti F, Álvarez-Fernández M, Manconi A, Duro J, Sánchez C, Iglesias R (2017) The differential slow moving dynamic of a complex landslide: multi-sensor monitoring. World Landslide Forum, Ljubljana
IGN (2014) Modelo digital del terreno, Hoja n° 0145, Instituto Geográfico Nacional
Iverson RM (2000) Landslide triggering by rain infiltration. Water Resour Res 36:1897–1910
Leroueil S, Locat J, Vaunat J, Picarelli L, Lee H, and Faure R (1996) Geotechnical characterization of slope movements:53–74
Leshchinsky D, Huang C-C (1992) Generalized three-dimensional slope-stability analysis. J Geotech Eng 118:1748–1764
Mira P (2002) Análisis por Elementos Finitos de Problemas de Rotura de Geomateriales. PhD, ETS de Ingenieros de Caminos, Canales y Puertos, Universidad Politécnica de Madrid
Notti D, Davalillo J, Herrera G, Mora O (2010) Assessment of the performance of X-band satellite radar data for landslide mapping and monitoring: Upper Tena Valley case study. Nat Hazards Earth Syst Sci 10:1865–1875
Ortiz M, Popov EP (1985) Accuracy and stability of integration algorithms for elastoplastic constitutive relations. Int J Numer Methods Eng 21:1561–1576
Oviedo-University (2011) Método y sistema para la realización de ensayos in situ y caracterización de terrenos heterogéneos o macizos rocosos intensamente fracturados. Spanish patent no ES-2351498-A1 (in Spanish). http://www.oepm.es/pdf/ES/ 0000/000/02/35/14/ES-2351498_A1.pdf. Accessed 27 Sept 2012
Pastor M, Merodo JF, Herreros M, Mira P, González E, Haddad B, Quecedo M, Tonni L, Drempetic V (2008) Mathematical, constitutive and numerical modelling of catastrophic landslides and related phenomena. Rock Mech Rock Eng 41:85
Perzyna P (1966) Fundamental problems in viscoplasticity. Adv Appl Mech 9:243–377
Quecedo M, Pastor M, Herreros M, Fernández Merodo J (2004) Numerical modelling of the propagation of fast landslides using the finite element method. Int J Numer Methods Eng 59:755–794
Shen J, Karakus M (2013) Three-dimensional numerical analysis for rock slope stability using shear strength reduction method. Can Geotech J 51:164–172
Simo JC, Taylor RL (1985) Consistent tangent operators for rate-independent elastoplasticity. Comput Methods Appl Mech Eng 48:101–118
SITAR (2004) Digital elevation model, 1:5000. Instituto Geográfico de Aragón
Stark TD, Eid HT (1998) Performance of three-dimensional slope stability methods in practice. J Geotech Geoenviron 124:1049–1060
Tacher L, Bonnard C, Laloui L, Parriaux A (2005) Modelling the behaviour of a large landslide with respect to hydrogeological and geomechanical parameter heterogeneity. Landslides 2:3–14
Tschuchnigg F, Schweiger H, Sloan S (2015) Slope stability analysis by means of finite element limit analysis and finite element strength reduction techniques. Part I: numerical studies considering non-associated plasticity. Comput Geotech 70:169–177
Van Asch TJ, Van Genuchten P (1990) A comparison between theoretical and measured creep profiles of landslides. Geomorphology 3:45–55
Wei W, Cheng Y, Li L (2009) Three-dimensional slope failure analysis by the strength reduction and limit equilibrium methods. Comput Geotech 36:70–80
Zhang Y, Chen G, Zheng L, Li Y, Zhuang X (2013) Effects of geometries on three-dimensional slope stability. Can Geotech J 50:233–249
Zheng H (2012) A three-dimensional rigorous method for stability analysis of landslides. Eng Geol 145:30–40
Zienkiewicz O, Humpheson C, Lewis R (1975) Associated and non-associated visco-plasticity and plasticity in soil mechanics. Geotechnique 25:671–689
Zienkiewicz OC, Chan A, Pastor M, Schrefler B, Shiomi T (1999) Computational geomechanics. Wiley, Chichester
Acknowledgements
This research has been supported by the Spanish Ministry of Economy and Competitiveness grants ESP2013-47780-557 C2-1-R and ESP2013-47780-557 C2-2-R. It is a contribution to the Moncloa Campus of International Excellence.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Bru, G., Fernández-Merodo, J., García-Davalillo, J. et al. Site scale modeling of slow-moving landslides, a 3D viscoplastic finite element modeling approach. Landslides 15, 257–272 (2018). https://doi.org/10.1007/s10346-017-0867-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10346-017-0867-y