
Abstract
Rockfalls are a major threat to settlements and transportation routes in many places. Although the general protective effect of forests against rockfalls is currently not questioned, little is known about the ideal properties of a forest stand that provides good protection. Therefore, in this study the question was assessed of how mountainous forests may influence rockfalls of single boulders. An actual rockfall trajectory was measured, recorded, analysed and simulated with a rockfall model. Rockfalls into different forest scenarios were also modelled for the site. Results showed that the actual rockfall event can be well simulated. Furthermore, a completely forested slope reduces velocity and energy of the falling blocks much better than a sparsely forested slope. For the profile discussed in this paper, the largest effect upon falling 3 m3 blocks was obtained with a high forest containing 350 trees per ha. The results confirmed common assumptions on ideal properties of a protective forest stand against rockfalls.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
The protective function of mountain forests has recently gained particular importance again because natural hazards such as snow avalanches, floods, landslides and rockfalls are major threats to settlements and traffic routes in large parts of the Alps and other mountainous regions. Measures have to be taken for public protection and for this purpose the development of protective forest stands is recognised as one of the most sustainable methods with which to optimise protection and to minimise costs at the same time (Berger et al. 2002; Dorren et al. 2004). Mountain forests are also highly sensitive to natural and anthropogenic disturbances. Hence, for a better understanding of cause – effect relationships between major processes in mountain ecosystems, there is a need for observation and monitoring activities combined with experimental studies (Kräuchi et al. 2000). At the same time, such investigations form the basis for hazard analysis and risk assessment (Kienholz, 2002; Kienholz et al. 2002; Hübl et al. 2002).
Although the general protective function of mountain forests against rockfalls — the natural hazard under consideration here — is not questioned nowadays (BUWAL, 1996), little is known about the ideal properties of forest stands that provide maximum protection or — even more important — optimum protection in a sustainable way. On a regional scale different aspects of the interaction between rockfalls and forests were already investigated by Jahn (1988), Zinggeler et al. (1991), Gsteiger (1993) and Dorren et al. (2004). However, in this paper the question being examined is, how mountain forests may influence single rockfalls. The focus is on the transit and deposition zone of rockfalls (stones or blocks), and in specific, on the influence of different forest stands upon single rockfall trajectories.
Rockfalls
According to Hutchinson (1988) and Varnes (1978) rockfalls comprise the more or less free and extremely rapid descent of rock masses of any size from steep slopes or cliffs. Rocks normally detach from cliffs due to gradual weakening by weathering triggered by external stimuli, such as heavy rain or freeze-thaw cycles. In addition individual stones and blocks may also originate from rock slides, rock topples, rock slumps or from earth and debris movements releasing rock components. In Switzerland (according to BUWAL, 1997) rockfall processes are mainly classified according to kinetics and kinematics:
-
In this paper rockfall (German: “Steinschlag” / “Blockschlag”) stands for the falling, rolling and bouncing of isolated stones (<0.5 m in diameter) and blocks (>0.5 m in diameter), which detached from solid rock or loose material. Rockfalls occur very abruptly either as a single or repeated event. Rockfall processes are controlled by the geologic condition of the rock, the climatic and meteorologic influences and the associated weathering processes. Furthermore, the form and direction of discontinuities and the related intersections also play an important role for the type of detachment and the size and shape of blocks and stones. Falling rocks normally reach velocities of 5–30 m/s and they eventually stop after the slope inclination drops below 30°. Depending on the local situation (e.g. topography) single rocks also may detach from another ongoing type of landslide process such as a debris flow.
-
In case of a larger rockfall (German: “Felssturz”), a more or less fragmented part of a cliff is detached and starts moving as a collective mass, which is further fragmented during movement. The volume is usually between 100 and 100,000 m3 per event. The mechanism of detachment usually has little influence on the continuation of the event. During the movement the interaction between the single rock components and the related energy exchange are relatively small. The velocity of the mass varies between 10 and 40 m/s.
-
Very large rockfalls, fast rockslides or rock avalanches (German: “Bergsturz”) result from simultaneous detachment of very large volumes of rock (1 million to several millions m3). There are different mechanisms of detachment (cf. Flageollet and Weber, 1996; Erismann and Abele, 2001). The type of movement is determined by the topography as well as by the fragmentation of the rock material and the interaction between the fragments. This interaction between the rock components (German: “Sturzstrom”) is highly characteristic of very large rockfalls. Thus the material can be milled to fine powder or it can even melt (Erismann and Abele, 2001). Velocities exceeding 40 m/s are usually reached and even for small slope gradients runout distances are normally very long.
Protection Forests
In Switzerland as well as in the neighbouring Alpine countries mountainous forests have always been considered as the most comprehensive “protection device” against natural hazards (Ott et al. 1997). In the first “forest policy regulation” of 1876 the Swiss Federation created the legal base for the reclamation of mountain forests, at that time often overused, and for new reforestations, aimed at the reduction of natural hazards.
Currently the general relevance of mountainous forests against rockfall, especially against single falling stones and blocks is known and according to BUWAL (1996) and NaiS (2003) the following facts are given:
-
In the potential starting zone of rockfalls the roots of the trees can hold the stones together. On the other hand trees can accelerate the decomposition of rock by adding organic acids from roots and needle-strew. Roots can also grow into rock fissures and accelerate frost weathering. Falling trees can also detach stones and blocks. Particularly with trees higher than 20 m wind can tilt the trees so strongly that roots and thus also stones can be rotated and loosened. Generally the effect of forests in the starting zone depends on geology, topography, tree species, tree weight and tree height. Forest stands close below the starting zone are particularly important in order to stop stones and blocks, before they gain high velocities.
-
In the transit zone of rockfalls the contact with trees can break stones and blocks or stop them temporarily. With deceleration the jump height of the rocks is also reduced. The effect of a tree contact mainly depends on the tree diameter and the stone size:
-
Very thin trees bend when hit by a rock; the deceleration effects are minor.
-
Depending on the energy of the rock impact, thicker trees can be injured or even broken; consequently, the speed and energy of the rocks are substantially reduced.
-
The forest effect against large blocks is limited.
-
At present the minimum effective diameter of trees for a certain stone or block size cannot exactly be computed. However, it is known that living trees can absorb more energy than timber beams. Furthermore, if stones are moving slowly, they maintain little energy and even thin trees can be effective enough.
-
In the transit zone of rockfalls the minimum effective tree diameter is important, since it is not always possible (particularly with large minimum effective diameters) to sustain an adequate forest structure over a longer period. Therefore the question is, in what condition must the forest provide protection: If settlements are at risk, potential impacts by large stones and blocks need to be considered, even if the events are infrequent. On the other hand, if traffic routes are at risk, even small stones may be significantly dangerous and the frequency of events is a major criterion.
In addition to the diameter of trees, the density of trees is also very important: A high number of stems normally leads to many contacts between rocks and trees. However, the maximum stem number in a given forest stand is limited depending on tree species, age distribution of the trees and other environmental factors. But as rocks can reach a maximum velocity after a travel distance of about 40 m, BUWAL (1996) and NaiS (2003) recommend limiting openings in the fall line to 20 m. Furthermore, the larger the falling rocks, the larger the mean tree diameters that should be sustained. On the other hand, for smaller rocks, a high number of thin trees should be maintained. In general the transit and deposition zones must have a minimum length in order to be effective; for short transit and deposition zones dense thickets are recommended.
Data needed for hazard assessment
Considering any dangerous gravitational process for the purpose of risk zonation and for the planning of preventive or mitigative measures for settlements and traffic routes, data about the frequency of events, possible trajectories and their runout distance, intensity in a specific place and the type of impact are required. For a rockfall the type of impact that has to be considered is the momentum of a hard and dense mass onto the wall of a building. Thus, in order to characterise the intensity of any rockfall, its kinetic energy is the most important parameter. In Switzerland hazard intensity and frequency are combined to delineate red, blue, yellow and white hazard zones as shown in Fig. 1. For a rockfall the following criteria are used:

Intensity-frequency-matrix as used for hazard zoning in Switzerland
-
High intensity: Energy >300 kJ
The impact of stones and blocks can cause substantial damage. Large fissures and cracks in foundations of a building and large holes in the walls or roof can cause a partial or total collapse of a building. If a building collapses people and animals are also highly endangered and may even be killed. Repairs after an impact are often achieved only at large expenditures. The damage may often be so large that evacuation and destruction of the building are necessary. Infrastructure (e.g. roads, power lines) can also be severely damaged and interrupted.
-
Medium intensity: Energy 30–300 kJ
Depending on the structure of the walls of a building, the impact of stones and blocks may cause damage. However, the building stability may not be impaired if the building is constructed in a way that is well adapted to the situation by the necessary examination and approval by qualified experts. Doors and windows may be severely damaged or destroyed. People and animals may also be endangered within buildings and the damage may affect their lives. Repairs are generally achieved at moderate expenditures. Infrastructure (e.g. roads, power lines) can be damaged and interrupted for short periods of time.
-
Low intensity: Energy <30 kJ
The impact of stones and blocks may cause holes in the brick-work. Humans and animals are usually hardly endangered within buildings.
However, in case of roads affected by rockfalls, even small stones can be very dangerous: A car either may be hit directly by a falling stone or it can crash into a block lying on a road. Therefore, for an assessment of rockfall hazard on roads, information on frequency is essential. Furthermore, in order to provide protective measures such as dynamic barriers (steel wire ring nets) or adapted forestry as discussed in this paper, it is also important to know the (maximum) jump height of rocks along their trajectories.
Methods
The object of this study was to document actual rockfall trajectories and accurately analyse the simulated trajectory with a rockfall model. Furthermore different forest scenarios were tested with a computer model. The reconstruction of a trajectory is only possible, if all impacts are clearly visible, which is normally only possible for larger blocks (>0.5 m in diameter), but not for smaller stones (<0.5 m).
Recording of rockfall trajectories
The comprehensive recording of an actual rockfall trajectory was mainly comprised of three steps: First, the geometry of the trajectory was reconstructed by measuring the distance, the azimuth and the slope angle between every rock impact on ground and trees. By means of these parameters the coordinates of every impact could be defined. General information about the rockfall event and the fallen block were also gathered. Second, the specific properties of every rock impact were noted, and third, relevant parameters characterising the terrain along the trajectory were recorded.
Ground impacts (Fig. 2) either result from rolling or bouncing of a rock. For both impact types length and width of the impact, impact and exit angles, maximum depth and shape of the impact were registered. For every tree impact (Fig. 3) the following parameters were measured: length, width, depth, height and azimuth of the injury centre and type of injury (e.g. injury to bark, injury to bark and wood, radial crack, tree uprooted, tree broken). Furthermore, tree parameters such as species and tree diameter were recorded.

Rockfall impact on ground
Rockfall impact on tree
In addition to the description of the impacts, the terrain along the trajectory was divided into sections with uniform characteristics according to the following three parameters: surface roughness, damping of the subsurface and forest structure. The roughness was determined by the size and the number of objects on the ground within a given area. The relationship between the size of the falling block and the micro-topography is very important for the movement and the velocity of a block. After impact the damping of the subsurface material influences the velocity of a block considerably. Upon impact a falling block decelerates much better in thick and soft soils than in shallow or frozen soils or on a hard rock surface. The damping effect also varies depending on the subsurface moisture content.
Finally, the forest structure was assessed by determining the mean diameter at breast height (DBH), the diameter distribution (proportion of thick and thin trees) and the Mean Tree-free Distance (MTFD). The MTFD, proposed by Gsteiger (1993), indicates the mean distance a falling rock can travel in a given forest stand along the fall line between two tree impacts. The MTFD is defined as follows: MTFD = area / (stem number * (mean DBH + mean stone diameter)).
Reconstruction of velocities and energies
With the parameters recorded, the reconstruction of the values of velocity and energy of a falling block is possible at every point of impact. Two different methods were applied and compared: the equivalent friction angle method (German: “Pauschalgefälle”) as proposed by Gerber (1998) and the jump parabola method as described by Zinggeler et al. (1991).
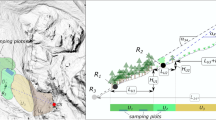
For the equivalent friction angle method the profile of the actual rockfall trajectory as well as the starting and deposition points of the rock have to be known. As shown in Fig. 4, the starting and deposition points are connected by a straight line, which represents the energy line. Presuming that the falling block is not rotating, the maximum velocity at every point along the trajectory was calculated by vtot=(2*g*h)0.5. However, in reality the block is rotating and part of the total energy is translational. Assuming that about 80% of the kinetic energy is translational and around 20% rotational, the rotational energy was calculated by means of the block mass and the tangential starting velocity vtan (Erot=0.2*m*vtan 2).

Equivalent friction angle
Applying another approach, the velocity of a falling block can also be derived from the shape of the rock’s jump parabola. For the full definition of such a parabola either three impact points (Fig. 5) or two impact points and the impact or exit angle (Fig. 6) need to be known. By means of the parameters given and the slant projectile motion formula the vertical velocity of the block can be calculated.

Jump parabola with three impacts
Jump parabola with two impacts and impact or exit angle
Simulation of different forest scenarios
Besides the reconstruction of velocities and energies, the actual trajectory was also compared with a two dimensional model simulation. In addition, different forest scenarios were tested. The rockfall model used was originally developed by Zinggeler et al. (1991) and enhanced by GEOTEST AG. This model was chosen because it not only allows to incorporate ground parameters but also a forest stand which is inserted directly via mean stem diameter, diameter distribution, stem number and Mean Tree-free Distance. Basic input parameters for the “Zinggeler+GEOTEST model” are a two dimensional (2d) profile of the rockfall trajectory and the size of the block, which is defined via the length of its three major axis. In the model the block is always rotating around the shortest axis. Further input data are the following three parameters as described above: surface roughness, damping of the subsurface and forest stand. Output parameters are jump heights, energy values (rotation and translation), velocities and travel distance of the blocks.
By comparing the calculated velocity and energy along the actual rockfall trajectory with its simulated values the performance of the rockfall model was tested. The main criteria for the evaluation of the performance were the travel distances and velocities of the blocks. Once the actual distance and velocity values were well reproduced by the model, different forest scenarios were introduced, i.e. the geometry (spatial tree distribution) of the forest stand was changed in order to test the influence of different forest stands. The following scenarios (according to Stierlin et al. 1994) were developed:
-
pole stage forest, mean DBH 21 cm, uniform diameters, 500 trees per ha, MTFD=11.6 m
-
fine high forest, mean DBH 34 cm, uniform diameters, 350 trees per ha, MTFD=15.5 m
-
mean high forest, mean DBH 41 cm, mixture of diameters, 200 trees per ha, MTFD=26 m
Results
Velocities and energies
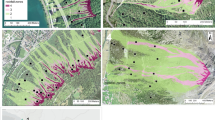
The procedure for the recording of an actual trajectory, for the reconstruction of rockfall velocity and energy along a travel path and for the simulation of different forest scenarios described above, was performed for several actual rockfall trajectories. As an example, one specific case shall be presented here: a rockfall that happened in April 2002, near Steg in Liechtenstein (9°34’E, 47°07’N). A map of the reconstructed, more or less linear rockfall travel path is given in Fig. 7. A single, almost cubical limestone block of about 3 m3 detached from a low, forested rock cliff, crossed a narrow forested zone hitting some trees and then produced a large series of ground impacts on a pasture where it suddenly stopped. Fig. 8A shows the profile of the rockfall trajectory divided into seven sections with different ground and forest parameters. The horizontal length of the trajectory is 440 m and the difference in height from the starting point to the deposition point is 256 m. Compared to other rockfall components in the area the block observed seems to have a typical shape (cubical) but a larger size; the mean size of most other blocks is only about 1.5 m3.

Rockfall travel path of Steg, Liechtenstein (coordinates are Swiss Coordinates in metres)

Super elevated profile (A) of the rockfall trajectory in Steg with the respective velocity (B) and energy (C) of the block at every ground impact
The velocities along the profile derived from the different estimation methods are given in Fig. 8B. The continuous line was calculated with the equivalent friction angle method. The velocity quickly rises up to 12.8 m/s. A first velocity peak of 16.3 m/s is reached after 180 m of horizontal distance. The maximum peak of 16.5 m/s is found at about 260 m and a last peak is reached after a terrain step at 340 m. Then the velocity decreases steadily until the block stops at 440 m. The impact velocities (without tree impacts) calculated with the jump parabola method show roughly the same three peaks. However, the highest velocity of 20.1 m/s according to this calculation is reached at the first impact. The exit velocity is also high at the first impact (15.3 m/s). Except for the impact at about 160 m, the exit velocity is always lower than the impact velocity.
The calculated energy of the block along the trajectory is shown in Fig. 8C. The continuous line is again derived from the equivalent friction angle method, as described in the methods section. This line represents the translational energy of the block with the same three peaks as in the velocity line. According to this calculation the maximum translational energy of 944 kJ is reached at about 260 m. The rotational energy is considerably lower than the translational energy and its maximum of 305 kJ is found at the first impact. The total kinetic energy is the sum of the translational and the estimated rotational energy and it reaches a maximum of 1,146 kJ at a distance of 260 m.
Simulated trajectory
For the computer simulation 50 almost cubical blocks (axis: 2.0*1.5*1.1 m) as observed were used. The model output for the simulation of the trajectory is given in Fig. 9: Graph A shows the maximum velocities and Graph B the maximum energies reached. As in the actual case there were no blocks (i.e. remnants from former rockfall events) further down the slope than the block observed, the assumption for this simulation was that the given block has a maximum runout distance and thus it also achieves maximum velocity and energy. Therefore calculations for the actual trajectory were compared with the simulated maximum values for velocity and energy.

Simulated maximum velocity (A) and energy (B) of the actual block (3 m3) for the profile of Steg with a “fine high forest” along a short part of the slope (between 80 and 115 m as shown in Fig. 8A); (B) represents a combination of translational and rotational energy
All 50 simulated blocks were deposited after a horizontal travel distance of 380 to 440 m. The simulated mean block jump heights are about 1.5 m, which is quite realistic when compared to the height of the tree injuries in the uppermost part of the actual trajectory. The variation in velocity and energy shows very similar patterns to the ones calculated with the equivalent friction angle method (cf. Fig. 8). There are basically three main peaks: at 180 m, from 220 to 250 m and at 320 m. The first and the last peak arose due to small rocky terrain steps, whereas the middle peak emerged because the blocks decelerated considerably in a swampy zone (260 to 300 m). The maximum velocity simulated is about 18 m/s and the maximum energy is around 1,600 kJ. These values are slightly higher than those calculated (16.5 m/s and 1,146 kJ) based on the data of the reconstructed actual trajectory.
Simulated forest scenarios
For the different forest scenarios the question was whether the travel distance of the observed 3 m3 block would have been shorter and the velocity and energy lower with a completely forested slope. As the observed block is among the biggest blocks, which detached in this area, the block size and shape was regarded as constant and no tests with larger blocks were performed. Furthermore, the ideal forest stand for this site was examined. Out of the three scenarios “pole stage forest”, “fine high forest” and “mean high forest” simulated along the whole profile of Steg with the same block (3 m3) as for the actual trajectory, the best scenario was found to be “fine high forest”. The maximum travel distance of the blocks was shortest with only 390 m horizontal distance and the jump heights were lowest with about 1 m of height in the uppermost part and only rolling blocks in the lower part.
Fig. 10 gives the simulated maximum velocity (A) and energy (B) for the blocks along the profile of Steg, forested with a “fine high forest” (mean diameter 34 cm, uniform diameters, 350 trees per ha, Mean Tree-free Distance 15.5 m). Although the course of the maximum velocity and energy is similar to the actual case with almost no forest (cf. Fig. 9), their values are considerably lower. The highest velocities are reached in the uppermost part of the profile. The maximum speed is 15 m/s, which is 3 m/s lower than in the actual case. In addition, the maximum values of energy are found at the beginning of the profile and the maximum achieved is only 1,100 kJ, which is 500 kJ less than in the actual case. The peak at 320 m due to a rocky terrain step is only half of the peak in the actual trajectory.

Simulated maximum velocity (A) and energy (B) of the actual block (3 m3) for the profile of Steg with a “fine high forest” along the whole slope; (B) represents a combination of translational and rotational energy
Besides the three main scenarios with the same forest stand along the whole slope, ten more scenarios with mixed forest stands were also tested with the computer model. Therefore the slope was divided into two or three sections with different forest stands as defined for the main scenarios. The comparison of the output parameters of the ten scenarios simulated with such clustered forests, resulted in very similar velocity and energy for all cases. None of the clustered scenarios performed better than the uniform “fine high forest” for the entire slope (cf. Fig. 10). However, all scenarios showed that the travel distance, jump heights, as well as the velocity and energy of the falling blocks are considerably lower than for the actual case with almost no forest.
Discussion
The aim of this study was to assess the question of how mountain forests may influence the travel distance of single rockfalls. Therefore actual rockfall trajectories were recorded, analysed and simulated using a rockfall model developed by Zinggeler et al. (1991). Different forest scenarios were also tested. Results showed that the actual rockfall event can be quite well simulated with the two dimensional computer model that was used. The performance of the equivalent friction angle method for the calculation of velocity and energy appears to be rather good, as the comparison of the actual and simulated values showed about the same pattern. The calculated velocities and energies are somewhat lower than the values simulated for the actual trajectory. However, there are some difficulties with the jump parabola method for the velocity calculation: The main problem is possibly that the exact impact and exit angles of a ground impact are often not clearly visible and therefore their proper reconstruction and measurement becomes difficult.
Furthermore results clearly showed that the totally forested slope reduces velocity and energy of the blocks much better than the actual slope with almost no forest. For the profile investigated the largest effect upon falling rocks of 3 m3 was obtained with a “fine high forest” containing 350 trees per ha with a mean diameter at breast height of 34 cm. According to NaiS (2003) this density of trees along with this mean diameter is near the upper limit of what is realistic in real forest stands: A high tree density considerably reduces rockfall velocity and kinetic energy. However, a major problem in actual forests is the limitation of tree density for a given forest stand. The mean minimum space every single tree needs has to be considered. If there is a forest stand with trees of similar age and almost equal diameters, this forest may have a maximum effect on reducing rockfall travel distance for some decades. But this effect can normally not be sustained over a long time period. On the other hand, if the forest is not uniform but sustainable over a long term, it will never come into a maximum stage, whereas an average optimum stage may be maintained.
Although in this study the “Zinggeler+GEOTEST model” proved to be very useful for comparing actual rockfall trajectories with simulations for forested slopes, further analyses performed with different rockfall models would make sense in order to supplement the current results. For example the widely applied 2d “Colorado Rockfall Simulation Model” (CRSP version 4.0) by Jones et al. (2000) could be used for a comparison. Furthermore, a 3d rockfall model such as “STONE” developed by Guzzetti et al. (2002) could be tested for cases where rocks take non-linear trajectories. Some comparisons of “STONE” modelling with actual documented rockfall paths are also shown in Guzzetti et al. (2003).
Conclusions
Results showed that the actual rockfall event recorded can be well simulated by means of the rockfall model developed by Zinggeler et al. (1991). Furthermore it was clearly shown that a completely forested slope reduces velocity and energy of falling blocks much better than a slope with almost no forest. Thus, this study has taken a step in the direction of confirming common assumptions on how an ideal forest stand can provide a protective mitigation measure against rockfall. However, the number of actual trajectories investigated is still too small to produce universally applicable findings. Further analyses of similar case studies as well as experimental studies are needed.
References
Berger F, Quetel C, Dorren LKA (2002) Forest: A natural protection mean against rockfall, but with which efficiency? The objectives and methodology of the ROCKFOR project. In: Proceedings of the International Conference Interpraevent 2002, Matsumoto / Japan, 2:815–826
BUWAL (1996) Minimale Pflegemassnahmen für Wälder mit Schutzfunktion. Bundesamt für Umwelt, Wald und Landschaft (BUWAL), Bern
BUWAL (1997) Berücksichtigung der Massenbewegungsgefahren bei raumwirksamen Tätigkeiten. Bundesamt für Umwelt, Wald und Landschaft (BUWAL), Bern
Dorren LKA, Maier B, Putters US, Seijmonsbergen AC (2004) Combining field and modelling techniques to assess rockfall dynamics on a protection forest hillslope in the European Alps. Geomorphology 57:151–167
Erismann TH, Abele G (2001) Dynamics of Rockslides and Rockfalls. Springer, Berlin Heidelberg New York
Flageollet JC, Weber D (1996) Fall. In: Dikau R, Schrott L, Brunsden D, Ibsen M (eds) Landslide Recognition, Wiley, West Sussex, pp. 13–28
Gerber W (1998) Waldwirkung und Steinschlag. In: Kursunterlagen FAN der Forschungsanstalt für Wald, Schnee und Landschaft (WSL), Birmensdorf
Gsteiger P (1993) Steinschlagschutzwald: Ein Beitrag zur Abgrenzung, Beurteilung und Bewirtschaftung. Schweizerische Zeitschrift für Forstwesen 144/2:115–132
Guzzetti F, Crosta G, Detti R, Agliardi F (2002) STONE: a computer program for the three-dimensional simulation of rock-falls. Computers and Geosciences 28/9:1,079–1,093
Guzzetti F, Reichenbach P, Wieczorek GF (2003) Rockfall hazard and risk assessment in the Yosemite Valley, California, USA. Natural Hazards and Earth System Sciences, European Geophysics Union 3:491–503
Hübl J, Kienholz H, Loipersberger A. (eds) (2002) DOMODIS: Documentation of Mountain Disasters, State of Discussion in the European Mountain Areas. Internationale Forschungsgesellschaft INTERPRAEVENT, Schriftenreihe 1, Handbuch 1, Klagenfurt
Hutchinson JN (1988) Morphological and geotechnical parameters of landslides in relation to geology and hydrogeology. In: Bonnard C (ed.) Landslides, AA Balkema, Rotterdam, 1:3–35
Jahn J (1988) Entwaldung und Steinschlag. In: Proceedings of the International Congress Interpraevent 1988, Graz, 1:185–198
Jones CL, Higgins JD, Andrew RD (2000) Colorado rockfall simulation program: Version 4.0 for Windows 95, 98, and NT. Miscellaneous Information Series 66, Colorado Geological Survey
Kienholz H (2002) Early Warning Systems Related to Mountain Hazards. In: Zschau J, Küppers AN (eds.) Early Warning Systems for Natural Disaster Reduction, Springer, Berlin, Heidelberg, New York, pp. 555–564
Kienholz H, Herzog B, Bischoff A, Willi HP, Kunz I, Perret S (2002) Quality Management in Natural Risk Assessment. In: Proceedings of the International Congress Interpraevent 2002, Matsumoto / Japan, 1:315–323
Kräuchi N, Brang P, Schönenberger W (2000) Forests of mountainous regions: gaps in knowledge and research needs. Forest Ecology and Management 132:73–82
NaiS (2003) Nachhaltigkeit im Schutzwald. Report of the Swiss Forest Agency, SAEFL, Bern
Ott E, Frehner M, Frey HU, Lüscher P (1997) Gebirgsnadelwälder: Ein praxisorientierter Leitfaden für eine standortgerechte Waldbehandlung. Paul Haupt, Bern, Stuttgart, Wien
Stierlin HR, Brändli U-B, Herold A, Zinggeler J (1994) Schweizerisches Landesforstinventar. Anleitung für die Feldaufnahmen 1993–1995. Eidgenössische Forschungsanstalt für Wald, Schnee und Landschaft (WSL), Birmensdorf
Varnes D (1978) Slope Movement, Types and Processes. In: National Academy of Sciences, Special Report, Washington, 176:11–33
Zinggeler A, Krummenacher B, Kienholz H (1991) Steinschlagsimulation in Gebirgswäldern. In: Berichte und Forschungen, Geographisches Institut, Universität Freiburg (CH), 3:61–70
Acknowledgement
This study was partially funded by the European Commission project ROCKFOR – Rockfall and Forest Interrelation (QLK5-CT-2000–01302). The authors would like to express special thanks to GEOTEST AG in Zollikofen (Switzerland) for providing their rockfall model “Zinggeler+GEOTEST”. Many thanks also go to Gerald Wieczorek for the thorough review of this paper.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Perret, S., Dolf, F. & Kienholz, H. Rockfalls into forests: Analysis and simulation of rockfall trajectories — considerations with respect to mountainous forests in Switzerland. Landslides 1, 123–130 (2004). https://doi.org/10.1007/s10346-004-0014-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10346-004-0014-4