
Abstract
The International GNSS Service (IGS) provides Ultra-rapid GPS & GLONASS orbits every 6 h. Each product is composed of 24 h of observed orbits with predicted orbits for the next 24 h. We have studied how the orbit prediction performance varies as a function of the arc length of the fitted observed orbits and the parameterization strategy used to estimate the empirical solar radiation pressure (SRP) effects. To focus on the dynamical aspects of the problem, nearly ideal conditions have been adopted by using IGS Rapid orbits and known earth rotation parameters (ERPs) as observations. Performance was gauged by comparison with Rapid orbits as truth by examining WRMS and median orbit differences over the first 6-h and the full 24-h prediction intervals, as well as the stability of the Helmert frame alignment parameters. Two versions of the extended SRP orbit model developed by the Centre for Orbit Determination in Europe (CODE) were tested. Adjusting all nine SRPs (offsets plus once-per-revolution sines and cosines in each satellite-centered frame direction) for each satellite shows smaller mean sub-daily, scale, and origin translation differences. On the other hand, eliminating the four once-per-revolution SRP parameters in the sun-ward and the solar panel axis directions yields orbit predictions that are much more rotationally stable. We found that observed arc lengths of 40–45 h produce the most stable and accurate predictions during 2010. A combined strategy of rotationally aligning the 9 SRP results to the 5 SRP frame should give optimal predictions with about 13 mm mean WRMS residuals over the first 6 h and 50 mm over 24 h. Actual Ultra-rapid performance will be degraded due to the unavoidable rotational errors from ERP predictions.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Background
To serve real-time and near real-time users, the International GNSS Service (IGS) (Dow et al. 2009) began producing Ultra-rapid (IGU) GPS orbit products officially on November 3, 2000, originally with updates every 12 h (at 00:00 and 12:00 UTC). The update cycle was reduced to every 6 h (adding 06:00 and 18:00 UTC) starting April 19, 2004. Each IGU release is composed of 24 h of observed orbits, with an initial latency of 3 h, together with propagated orbits for the future 24 h. Each IGU product set also includes earth rotation parameters (ERPs, consisting of x and y pole coordinates, polar motion rates, and length of day) for the midpoint epoch of the observed and predicted periods, as well as GPS satellite clock offsets (also observed and predicted). The cadence for IGU orbit product updates is illustrated in Fig. 1, where time steps progress downward. As of August 26, 2012, seven Analysis Centers (ACs) are actively contributing to the IGU combined products, with other candidate ACs being included for evaluation only.

Schematic diagram of the production schedule for IGS Ultra-rapid orbit products. Time steps progress downward
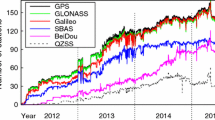
When the daily IGS Rapid observed orbits are released each day at 17:00 UTC, the four prior overlapping IGUs from each AC plus the combination are compared to the Rapids as reference. Comparisons are made for the 00:00 UTC observed IGU orbits and for the first 6 h of predictions from each IGU. Although actual real-time users rely on orbit predictions 3–9 h into the future due to the initial 3 h latency, we use predictions up to 24 h ahead for this study to fully compare with IGU products. Averaged over the full constellation, the 1D weighted RMS (WRMS), which is the weighted average of the orbit differences in the geocentric component directions after Helmert transformation, and median differences for the IGU combined GPS observed orbits usually fall between 5 and 10 mm since 2009; see plots at acc.igs.org. The first 6 h of recent predicted orbits show WRMS comparisons between 20 and 50 mm for the contributing ACs, with median residuals between 20 and 40 mm (Fig. 2). According to the IGS mail #6053 (available at http://www.igs.org/pipermail/igsmail/2010/006124.html), comparable statistics for the first 6 h of combined predictions are about 21 ± 8 mm WRMS and 16 ± 3 mm median on average. Over longer prediction spans, globally averaged errors increase approximately as the square root of the time interval. However, as is true for all IGS orbit products, the quasi-random sub-daily WRMS scatter is only about half the total estimated error. The other half mostly comes from net rotations of the orbit constellation, as measured by the Helmert alignment parameters, especially rotations about the earth’s rotation axis. Larger axial rotational errors are expected due to unavoidable reliance of orbit predictions on predictions of the earth’s orientation in inertial space, and natural excitations of the UT1 variations, which affect the axial rotation of the terrestrial to celestial transformations, exceed that for polar motion by a factor of about five to six (Morabito et al. 1988). For a 1-day UT1 prediction error of 0.126 ms RMS (Dick and Richter 2011), the induced axial rotational error at GPS altitude is about 16 mm (equatorial). Additional rotational errors are expected due to limitations of orbit modeling and propagation, as discussed below. Furthermore, twice-annual eclipse periods present special modeling problems, especially for the Block IIA satellites for which prediction errors can often be much larger than at other times (Dousa 2010). Probably, the most demanding real-time user requirement is for the estimation of zenith troposphere delays (ZTD) for meteorology and weather modeling applications, where high accuracy and short latency are both important. The IGU predicted GPS orbit accuracy satisfies the need for ZTDs with errors < 1 cm provided that care is taken to remove occasional outlier orbits (mostly during eclipse season) based on post-fit observation residuals (Dousa 2010).

Statistics of recent predicted orbits for each IGS Analysis Center and the IGU combination compared to the IGS Rapid orbits are computed over the first 6 h of predictions. Upper plot shows smoothed 1D weighted RMS, and the lower plot shows median residuals. More detailed statistical plots of IGS products can be found at http://acc.igs.org
Introduction
By design, the GPS navigation message includes predicted orbit information that is updated approximately daily. In recent years, the 1D WRMS accuracy of the broadcast GPS orbits has reached the level of about 90 cm, according to IGS monitor results at acc.igs.org, but previously it was much poorer. This is not adequate, however, for many high-accuracy user applications. So, efforts to generate better orbits began already in the 1980s (e.g., Lichten and Bertiger 1989). Based on the work performed by industrial contractors for GPS (Fliegel et al. 1985, 1992; Fliegel and Gallini 1989, 1996), the common orbit modeling approach at that time consisted of estimating the classical six state parameters plus a scaling parameter for the direct a priori acceleration due to solar radiation pressure (SRP), as well as a nuisance parameter, the so-called Y bias, to account for an unknown force in the spacecraft-centered Y direction (along the axis of the solar panels) thought to be caused by panel misalignments. A priori block-dependent models were those from Fliegel and colleagues based on a physical treatment of the SRP forces acting on the satellites using the known dimensions and optical properties of the spacecraft components.
Experience during the early years of the IGS demonstrated that this purely physical approach plus very limited parameterization to model the GPS orbits could not achieve a desired accuracy at the decimeter level or better. Motivated by Colombo’s (1989) idea of absorbing residual gravitational perturbations into empirical parameters that are harmonics of the orbital period, Beutler et al. (1994) proposed adding to the state estimate nine SRP parameters consisting of scale and once-per-revolution sine and cosine terms in each of the three orthogonal directions of the satellite frame oriented toward the sun (Fig. 3 and see details below). This Extended CODE Orbit Model (ECOM, where CODE is the Center for Orbit Determination in Europe) was shown to give much more precise GPS orbits than the classical approach and mitigated spurious shifts in the geocentric y direction of the orbit origin (Springer 1999). Nonetheless, the ECOM model was never implemented operationally within the IGS to fit GPS data due to strong correlations between some of the nine empirical SRP parameters and such important estimates as length of day (Springer et al. 1999). Tests showed that the best combination of geodetic results could be obtained by tightly constraining the four sine/cosine terms of the ECOM model in the directions toward the sun and along the satellite Y solar panel axis to zero. This truncated version, together with constrained empirical velocity breaks at noon epochs, has served as the basis for subsequent orbit products from most IGS ACs. The primary alternative approach, adopted at the Jet Propulsion Laboratory (JPL), involves stochastic estimation of empirical satellite perturbations with respect to tailored block-specific a priori models consisting of a trigonometric expansion in terms of the earth–satellite–sun angle (Bar-Sever and Kuang 2004, 2005). A greatly elaborated expansion of the ECOM model, analogous to the JPL approach but with a different basis for expansion, was also proposed by Springer et al. (1999), but it has never come into general usage except as the a priori for the CODE data fitting. We evaluate hereafter the relative performance of the two ECOM modeling variants, with either nine or five SRP parameters, to predict GPS orbits as a function of the arc length of the fitted observed orbits. Our goal is to develop a prediction strategy that will contribute usefully to the IGS Ultra-rapid product combination.

Orientation axes of the spacecraft-centered reference frame used by the Extended CODE Orbit model to treat solar radiation pressure effects
It should be mentioned that Rodriguez-Solano et al. (2012) have very recently developed an innovative physically motivated box-wing GPS orbit model that performs about as well as the ECOM empirical model but offers the potential of reduced parameterization and reduced correlations with non-orbit estimates. While promising for future studies, this model is not considered here.
Data
To focus on the dynamical aspects of the problem, nearly ideal conditions have been adopted: IGS Rapid (IGR) orbits (available from IGS Data Centers) and ERPs from IERS Bulletin A (from http://maia.usno.navy.mil) are used as “truth” in this study. The 24 h IGR orbits are concatenated into arcs up to 72 h long to form pseudo-observations (Fig. 4) that are first rotated from the earth crust-fixed frame used by the IGS to a quasi-inertial frame, then fitted to the chosen orbit models, and propagated 24 h into the future by fixing the orbit parameters to the values determined from the fitted arc (Fig. 5). Solar and lunar eclipsed observation data for Block IIA are excluded from the data fitting because of the unpredictable yaw attitude. The predicted orbits are finally rotated back to a crust-fixed frame to compare with archived IGR orbits for accuracy assessment.

Diagram illustrating the data configuration for orbit prediction simulations. IGS Rapid observed orbits are concatenated to build observation arcs from 24 to 72 h to predict forward 24 h

Flow chart of the modeling to generate GPS orbit predictions
Obviously, any errors in the assumed ERP predictions used to transform the propagated GPS orbits from inertial space back into the crust-fixed frame will map fully into the orbits themselves. By using archived Bulletin A ERPs for this retrospective study of dynamical modeling, such errors should be negligible. However, it should be kept in mind that any realistic orbit prediction strategy usable for IGU operations will inevitably suffer from significant ERP prediction errors in addition to the dynamical effects considered here (see Introduction). To eliminate possible seasonal effects and to encompass equal eclipse intervals for all satellites, the 365 consecutive days from January 1 to December 31, 2010 are used.
Dynamic modeling
A total of up to 15 orbit parameters are estimated from the IGR pseudo-observations for each GPS satellite over arc lengths that vary from 24 to 72 h: satellite geocentric position (x, y, z), velocity (\( \dot{x},\dot{y},\dot{z} \)), and up to nine SRPs (\( D_{0,C,S} ,Y_{0,C,S} ,B_{0,C,S} \)); the empirical SRP acceleration model is
where u is the argument of latitude (Springer et al. 1999). The body-centered Cartesian coordinate system used for the ECOM SRP model is illustrated in Fig. 3. In other words, offset and once-per-revolution empirical SRP parameters are fit for each orthogonal direction for each satellite. The truncated 5-parameter version of the SRP model is also estimated to compare with the 9-parameter solutions. This is accomplished by tightly constraining the sine and cosine terms of the D and Y directions to zero with an uncertainty of 5 × 10−12. Hereafter, we denote the full 9-parameter SRP model as “6 + 9” and the truncated 5-parameter version as “6 + 5.” Unlike in most IGS operational product solutions, empirical noon velocity breaks are not fitted here as these cannot be propagated forward in a sensible way.
The gravity field is the EGM2008 geopotential (Pavlis et al. 2012) up to degree and order 12 with the corrections recommended in IERS Conventions 2010 (Petit and Luzum 2010). For consistency with the bulk of ACs contributing to the IGS Rapid orbits, accelerations due to reflected earth radiation and GPS antenna thrust are not applied; see Table 1 for further details.
For each day, orbit predictions using both “6 + 9” and “6 + 5” models are computed using observed IGR orbit arcs varying from 24 to 72 h immediately prior, and results are compared to the IGR orbits as truth for the prediction day. GPS satellites with Notice Advisory to Navstar Users (NANU) advisories are excluded from consideration during their announced outages. Performance was gauged using the metrics of WRMS and median orbit 1D residuals computed over both the first 6 h and the full 24 h of predictions after first fitting and removing a 7-parameter Helmert frame transformation:
where S is an orbit frame scale factor, \( {\mathbf{T}} = \left[ {\begin{array}{*{20}c} {T_{x} } & {T_{y} } & {T_{z} } \\ \end{array} } \right]^{T} \) is a translational vector offset of the orbit origin, and \( {\mathbf{R}} = \left[ {\begin{array}{*{20}c} {R_{x} } & {R_{y} } & {R_{z} } \\ \end{array} } \right]^{T} \) is a rotational vector offset about each geocentric axis. Note that R x , R y , and R z are sufficiently small, so that the assumption of rotation as a vector is valid here. The stability of these Helmert parameters was used as an additional measure of prediction performance, noting that the actual IGU accuracy is limited mostly by rotational variations (see Introduction). Statistical weighting relied upon the satellite accuracy codes provided with the IGR products.
The initial condition (IC) epoch is set to be 23:45 of the day immediately before the prediction interval. This is the last epoch of the most recent IGR used to estimate the orbit model; see Fig. 4. To investigate how the quality of the predictions is affected by the span of fitted IGR observations, orbit predictions were performed by using arcs from 24 h up to 72 h long, incremented by 1-h intervals from the available concatenated IGR orbits (Fig. 4). Thus, 48 different sets of propagated orbits were generated for each prediction day, for a total of 17,520 orbit predictions for the year (for each orbit model). The sequence of operations followed is illustrated in Fig. 5.
Weights for WRMS are determined by the accuracy codes of each satellite in the IGR header. As described in the Extended Standard Product 3 Orbit Format document (available at http://www.igs.org/igscb/data/format/sp3c.txt), orbit accuracy exponents (a i ) are converted into the unit of length and inversely applied as weights for each satellite. Spherical Standard Error (SSE) for each satellite is defined as
where \( \sigma_{x,y,z} \) are the standard deviations of orbit differences for each geocentric component between IGR and predicted orbit. If we assume zero mean, WRMS can be obtained by using normalized weights as
where subscript i is the satellite number, and \( w_{i} = {1 \mathord{\left/ {\vphantom {1 {2^{{a_{i} }} }}} \right. \kern-0pt} {2^{{a_{i} }} }}. \)
Results
The quality of predicted GPS orbit is sensitive to the initial condition (position, velocity, SRP) and dynamic models (IERS convention). Without modifying dynamic models, we empirically examined the orbital differences and alignments for various fitted arc lengths which directly affect the IC for the predicted orbits.
Orbital differences between predicted and IGR orbits after Helmert transformation in a body-fixed frame are illustrated in Fig. 6. Block II-R satellite PRN 16 shows very small periodic fluctuations and divergence over time even during solar eclipsed season, whereas Block IIA PRN 30 has a noticeable increase in fluctuations and significant divergence especially in the along-track direction. This is a known behavior due to unpredictable yawing of Block IIA satellites during eclipse season.

Plots showing orbital difference in satellite body-fixed frame in inertial space. One exemplary satellite for each block is selected (PRN 30 for Block IIA and PRN 16 for Block IIR). Two days are selected: solar visible day (upper) and solar eclipse day (lower)
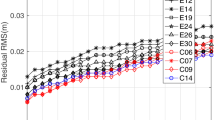
The series of “6 + 9” and “6 + 5” predicted orbits, which are based on different fitting intervals, were compared to the corresponding IGR orbits using (2). For each comparison, WRMS and median statistics were computed over the ensemble of satellite position residuals. Then, means and standard deviations of the WRMS and median for each fitting interval were plotted in Fig. 7. Corresponding plots for the Helmert transformation parameters are shown in Fig. 8 (for the orbital scales), Fig. 9 (for the translational offsets), and Fig. 10 (for the rotational differences). In all cases, separate trends are displayed for evaluations over only the first 6 h and the full 24 h of predictions. The vertical shaded bands in each plot mark the range of fitted arc lengths that yields combined minima for the WRMS and median residuals (mean and scatter), namely arcs between about 40 and 45 h for both SRP models (Fig. 7). The WRMS scatter for the 24-h predictions is particularly sensitive to arcs outside this range. Table 2 gives the means and standard deviations for the WRMS and median residuals for 40- to 45-h arcs for both models and prediction intervals, as well as statistics for the corresponding Helmert frame parameters. After Helmert alignment, the complete ECOM 6 + 9 SRP model produces significantly smaller WRMS and median prediction residuals over both 24 and 6 h. On the other hand, the 6 + 5 SRP model yields much better rotational alignment with the IGR orbits than the 6 + 9 model (Fig. 10). Note that 1 milliarcsecond (mas) is about 129 mm of equatorial displacement at GPS altitude (about 20,200 km above the earth’s surface), which is used for the scale on the right side of the rotation plots in Fig. 10. The scale and translational offsets are very similar for both models and have comparatively smaller impact than the rotations. None of the Helmert parameters varies strongly with arc length though the translations are somewhat sensitive, and they are also minimized for the same 40–45 h arc range as for the orbit residuals.

Means (upper panels) and standard deviations (lower panels) of 1D weighted RMS and median residuals for the orbit differences between test predictions and IGR after applying a Helmert transformation and computed over the year 2010 for various observed arc lengths. Results for the complete ECOM 6 + 9 SRP model are shown in the left two panels and for the truncated 6 + 5 model in the right two panels. The shaded vertical bands here and in Figs. 8, 9, and 10 mark the arc length range that gives the best overall agreement with the IGR orbits

Orbital scale differences between test predictions and IGR for the 6 + 9 SRP model (left) and the 6 + 5 SRP (right) computed over year 2010 for various observed arc lengths

Orbital origin translational offsets for each axis of the seven Helmert transformation parameters are computed over year 2010 for various observed arc lengths

Rotational offsets for each axis of the seven Helmert transformation parameters are computed over year 2010 for various observed arc lengths. Note that the smaller rotational scatter achieved using the 6 + 5 model compared to 6 + 9 parameterization
Conclusion
This study explores the baseline error budget for an IGS-style Ultra-rapid orbit prediction strategy, which is summarized in Table 2. The optimal arc length of observed orbits for fitting is around 40–45 h. According to our results, the best predicted GPS orbit accuracy can be achieved by using the full 6 + 9 ECOM SRP model but rotationally aligned to match the truncated 6 + 5 SRP orbit frame. Such a strategy achieves predicted GPS orbits with respective error components for WRMS residuals, median residuals, and rotational scatter of 50, 33, and 27 mm over 24 h; and 13, 11, and 23 mm over the first 6 h. The origin translation and scale scatters of the predicted orbits are not significant. This level of performance is roughly comparable to that of the present combined IGU predicted orbits. The actual performance will also be affected by errors in the ERP predictions required to transform from inertial to an earth-fixed reference frame. In practice, the ERP prediction errors usually dominate, especially those for UT1 that affect rotations about the geocentric z axis.
During the actual Ultra-rapid operational processing, IGR orbits are not available for the entire previous 40–45 h period. Therefore, one must concatenate a combination of IGR, IGU observed, and the most recent locally produced near real-time orbit solutions to form an observational arc of sufficient length and latency. Due to discontinuities, mainly rotational offsets, between these various observational inputs, model fits can be degraded and the quality of orbit predictions adversely affected. So, ensuring good frame alignment among the input segments is strongly recommended.
References
Bar-Sever Y, Kuang D (2004) New empirically derived solar radiation pressure model for Global Positioning System satellites. Interplanetary network progress report, 42–159, Jet Propulsion Laboratory, Pasadena, CA
Bar-Sever Y, Kuang D (2005) New empirically derived solar radiation pressure model for global positioning system satellites during eclipse seasons. Interplanetary Network Progress Report, 42–160, Jet Propulsion Laboratory, Pasadena, CA
Beutler G, Brockmann E, Gurtner W, Hugentobler U, Mervart L, Rothacher M (1994) Extended orbit modeling techniques at the CODE processing center of the International GPS Service for Geodynamics (IGS): theory and initial results. Manuscripta Geodaetica 19:367–386
Colombo OL (1989) The dynamics of global positioning system orbits and the determination of precise ephemerides. J Geophys Res 94(B7):9167–9182
Dick WR, Richter B (eds) (2011) International earth rotation and reference systems service (IERS) (2011) Annual Report 2008–09. Verlag des Bundesamts für Kartographie und Geodäsie, Frankfurt am Main
Dousa J (2010) The impact of errors in predicted GPS orbits on zenith troposphere delay estimation. GPS Solut 14:229–239
Dow JM, Neilan RE, Rizos C (2009) The international GNSS service (IGS) in a changing landscape of Global Navigation Satellite Systems. J Geod 83(3–4):191–198 IGS Special Issue
Fliegel HF, Feess WA, Layton WC, Rhodus NW (1985) The GPS radiation force model. In: Goad C (ed) Proceedings of the first international symposium on precise positioning with the global positioning system. NOAA National Geodetic Survey, Rockville
Fliegel HF, Gallini TE (1989) Radiation pressure models for Block II GPS satellites. In: Proceedings of the fifth international symposium on precise positioning with the global positioning system. NOAA National Geodetic Survey, Rockville, MD
Fliegel HF, Gallini TE, Swift ER (1992) Global positioning system radiation force model for geodetic applications. Geophys Res Lett 97(B1):559–568
Fliegel HF, Gallini TE (1996) Solar force modeling of block IIR global positioning system satellites. J Spacecraft Rockets 33(6):863–866
Lichten SM, Bertiger WI (1989) Demonstration of sub-meter GPS orbit determination and 1.5 parts in 108 three-dimensional baseline accuracy. J Geod 63(2):1667–1689
Morabito DD, Eubanks TM, Steppe JA (1988) Kalman filtering of earth orientation changes. In: The earth’s rotation and reference frames for geodesy and geodynamics, proceedings of the 128th symposium of the international astronomical union. Kluwer, Nowell
Pavlis NK, Holmes SA, Kenyon SC, Factor JK (2012) The development and evaluation of the Earth Gravitational Model 2008 (EGM2008). J Geophys Res 117:B04406. doi:10.1029/2011JB008916
Petit G, Luzum B (eds) (2010) IERS Conventions (2010) IERS technical note 36, Verlag des Bundesamts für Kartographie und Geodäsie, Frankfurt am Main
Rodriguez-Solano CJ, Hugentobler U, Steigenberger P (2012) Adjustable box-wing model for solar radiation pressure impacting GPS satellites. Adv Space Res 49:1113–1128
Springer TA (1999) Modeling and validating orbits and clocks using the global positioning system. PhD dissertation, University of Bern, Bern, Switzerland, ISBN 978-3-908440-02-4 (ISBN-10 3-908440-02-5), http://www.sgc.ethz.ch/sgc-volumes/sgk-60.pdf
Springer TA, Beutler G, Rothacher M (1999) A new solar radiation pressure model for GPS satellites. GPS Solut 2(3):50–62
Acknowledgments
This investigation was stimulated by very helpful discussions with Yves Mireault (Natural Resources Canada) on IGU orbit prediction strategies. The assistance of Bob Dulaney (NOAA/National Geodetic Survey) in setting up the test procedures is greatly appreciated.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Choi, K.K., Ray, J., Griffiths, J. et al. Evaluation of GPS orbit prediction strategies for the IGS Ultra-rapid products. GPS Solut 17, 403–412 (2013). https://doi.org/10.1007/s10291-012-0288-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10291-012-0288-2