
Abstract
We used a modified version of the Do as I Do paradigm to investigate dogs’ preference and flexibility in the acquisition of different types of spatial information in social learning situations. When required to match the location of the demonstration, dogs (N = 16) preferentially relied on allocentric information, i.e., the relationship between the location of the demonstration and the various objects surrounding it. However, when allocentric cues were inadequate to solve the task, dogs learned to rely on egocentric information, i.e., the direction—left/right—taken by the human demonstrator. The ease of resorting to the non-preferred egocentric strategy was sex-dependent with males acquiring the egocentric strategy in fewer trials than females. This study shows that dogs rely preferentially on allocentric cues when recalling socially acquired spatial information. However, they are impressively flexible in switching to egocentric strategies according to the task requirements. Whether preference for the allocentric strategy in processing spatial information is embedded in the nature of social learning or restricted to our paradigm is an open question. This study also supports the idea that sex differences in cognitive domains are widespread among mammals and calls for further investigations aimed at shedding light on the evolution, function and mechanisms of such differences.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
Social learning provides a flexible way of acquiring information that avoids the negative consequences often accompanying individual learning (Zentall 2006). Dogs are adept at relying on social learning, not only from conspecifics but also from humans (Kubinyi et al. 2009), and their skills have been successfully studied using the Do as I Do paradigm (Topál et al. 2006; Huber et al. 2009; Fugazza and Miklósi 2014; Fugazza et al. 2015). With this method, dogs are trained to reproduce on command the actions performed by a human demonstrator, and thus their imitative abilities can be tested. A recent study (Fugazza et al. 2016) revealed that dogs trained with this method also generalize imitation across context modifications. Specifically, they can imitate an object-related action, even if the object used by the demonstrator is displaced to a different location. However, if two different target objects are present and, before commanding the dog to imitate, the location of the object used by the demonstrator is interchanged with that of the other object, dogs show a spatial bias toward the location of demonstration. This indicates that dogs tend to value spatial over figurative information when learning socially, and raises the question about what type of spatial information is acquired in such social situations. When learning and recalling the action to be performed, dogs may rely either on the relationship between the location of the demonstration and the various objects surrounding it (i.e., allocentric information) or on the direction—left/right—in which it moves (i.e., egocentric information). In individual learning situations, dogs show a preference for relying on egocentric strategies, but can flexibly resort to using only allocentric or even both types of information, according to the complexity and requirements of the spatial task (Fiset et al. 2000, 2007). Whether the same applies to social learning situations is not known; however, it would not be surprising if allocentric information is relatively more important in social learning, as the animal is learning about the movements of another individual, rather than its own.
Given dogs’ spatial bias in Do as I Do tasks (Fugazza et al. 2016), this paradigm seems an ideal method for investigating the acquisition of spatial information in social learning situations. We thus applied this method to assess (1) whether in a social learning context dogs would preferentially use an allocentric or an egocentric strategy to recall the location of the demonstration and (2) whether they would be able to resort to the non-preferred strategy when the preferred one is inadequate to solve the task.
In addition, since sex-dependent differences in the use of spatial strategies are well documented in other species (Healy et al. 2009), we aimed to assess whether male and female dogs differed in their preference and flexibility in the use of spatial strategies. There is no reason to expect dogs to be exceptional in this respect, but so far no study has focused on sex differences in their use of spatial strategies.
Methods
Subjects
We enrolled 16 adult pet dogs, 8 males, of which 2 were gonadectomised and 8 females, of which 6 were gonadectomised. The female dogs’ age ranged from 2 to 12 years (mean age ± SD = 7.1 ± 3.8) and the male dogs’ age ranged from 2 to 11 years (mean age ± SD = 5.9 ± 3.2), with no significant age difference between the two groups (t = 0.70, P = 0.49). All the subjects had been trained by their owners with the Do as I Do method (described in greater detail in Fugazza and Miklósi 2014) to reproduce human demonstrated actions on command ‘Do it!’, after a short interval. The training protocol consisted of three phases. In the first phase, dogs learned to match their behavior to three demonstrated familiar (i.e., already trained) actions, using the ‘Do it!’ command through operant conditioning techniques. When dogs reached 80% of accuracy over two consecutive sessions (sessions lasted 5 min and generally included 6–10 trials) the second phase began. In this phase, dogs learned to match their behavior to a total of six demonstrated familiar actions, using the ‘Do it!’ command, until reaching an accuracy of 80%. In the last phase, dogs were taught to reproduce the action observed after the ‘Stay’ command even if an interval elapsed between the demonstration and the ‘Do it!’ command, and the demonstrator performed other actions during the interval (e.g., walked with the dog in another direction, behind a curtain). In this phase, the delay between the ‘Stay’ and the ‘Do it!’ command was gradually increased from 5 to 30 s. Dogs were admitted to the experiments once they could match their behavior to the demonstration of actions in two trials in a row, with a delay of 30 s. The action that the dogs performed immediately after the ‘Do it!’ command was considered to match the demonstration if it entailed the same goal and, given the species-specific differences in the behavior repertoire of the two species, was executed in a similar way.
Experimental setup
Tests were conducted in outdoor fenced areas (approximately 40 × 50 m). Figure 1 shows the layout of the test area. Two identical blue target mats (20 × 20 cm), on which the demonstrations were performed, were placed 4 m apart. A tarpaulin screen was placed 5 m from the targets. A plastic chair and an opened beach umbrella were used as salient allocentric cues that were kept in a constant location, about 5 m from the targets, in all tests.

Schematic representation of the experimental setting (not to scale). a Demonstration phase for both the preferred strategy determination, and the acquisition of non-preferred strategy; b recall phase for the preferred strategy determination; c recall phase for the acquisition of non-preferred strategy
Preferred strategy determination
Dogs were first tested in a deferred imitation task to determine if they preferentially used an egocentric or allocentric strategy when recalling the demonstration. The owner and the dog faced each other across the imaginary line connecting the two identical targets. The owner asked the dog to stay and pay attention, using cues well known by the dog (‘Stay’ command), and showed a simple action (go and touch target mat) on one of the two targets, as shown in Fig. 1a. The owner went back to the starting position, took the dog on leash and led it behind a screen, and handed it over to a helper. The helper held the dog on leash, while the owner went back to the testing area and touched the other target, in the same way as he had with the demonstrated one (mean ± SD duration of the retention interval = 75 ± 14 s); this was intended to control for odor cues. The dog could not see this action because its view of the testing area was blocked by the screen.
After the retention interval, the owner led the dog back to the starting position and gave the ‘Do it!’ command, while both dog and owner were facing the direction opposite to those they had faced during the demonstration, as shown in Fig. 1b. Dogs were thus forced to choose between using either an allocentric or an egocentric strategy, which would lead to opposite targets. Regardless of their choice, dogs were rewarded with food and praise when they performed the action. Before, during and after giving the command, the owner looked straight forward and did not move, in order not to give involuntary cues to the dog. Dogs underwent 6 trials, with random variation across trials of the orientation of the owner and the dog with respect to the allocentric cues, and of the target on which the action was demonstrated.
Acquisition of non-preferred strategy
After determining their preferred strategy, we tested dogs in a condition in which that strategy could not be used to solve the task. Since all dogs had preferred an allocentric strategy (except one who did not show any preference; see Results), the only useful information they were now provided with was egocentric. The procedure was similar to that of the previous phase. However, as shown in Fig. 1c, while the dog was behind the screen, targets were rotated by 90°, so that when the owner and dog returned to the setting, they faced a direction rotated by 90° compared to the demonstration. The owner varied his/her rotated position randomly across trials. The allocentric strategy was therefore unsuitable to solve the task. The dog was rewarded only if it touched the correct (egocentric) target. Dogs were tested until they chose the correct target three times in a row.
Data collection and analysis
All trials were video recorded, and the Observer® XT software (Noldus Information Technology, The Netherlands) was used to collect data about the duration of the interval between the demonstration and the subsequent ‘Do It’ command and about the target chosen by the dog to perform the action (allocentric/egocentric in the first phase; correct/wrong in the second phase). Although dogs’ choices were unambiguous, inter-observer reliability was assessed by comparing data collected by a second observer on a subset (30%) of the videos; there was 100% agreement between data collected by the two observers.
We used the number of allocentric or egocentric choices in the 6 trials of the first phase to classify dogs as egocentric (≥4 egocentric choices) or allocentric (≥4 allocentric choices) or uncertain (3 egocentric and 3 allocentric choices). The number of allocentric choices made by males and females were compared with a Mann–Whitney test. In the second phase of the experiment, we measured the number of trials required to reach the learning criterion and compared it between male and female dogs with a Mann–Whitney test. Analyses were performed with SPSS (ver. 22, IBM, Armonk, NY, USA), and the significance level was set at 0.05.
Results
In the first phase, median number of allocentric choices was 5 out of 6 (min = 3, max = 6, 1st quartile = 5, 3rd quartile = 5). Fifteen out of the 16 dogs preferentially used an allocentric strategy, while one dog was classified as uncertain and was still tested for its ability to resort to an egocentric strategy. No difference was found between males and females in the number of allocentric choices in the first phase (U = 28.0, N 1 = N 2 = 8, P = 0.72).
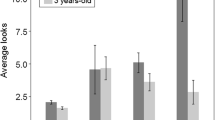
Figure 2 shows learning curves of individual dogs in the second phase. All dogs were able to resort to the non-preferred egocentric strategy, within a maximum of 13 trials. The median number of trials needed to reach the criterion was 5 and males (median: 3.5, min: 3, max: 10) needed fewer trials in this phase compared to females (median: 9, min: 3, max: 13; U = 11.5, N 1 = N 2 = 8, P = 0.028). The difference was significant regardless of the inclusion/exclusion of data from the dog that did not show any preferred strategy during the first phase.

Individual responses (filled dots) of female (F1–F8) and male dogs (M1–M8) across trials, for the acquisition of the of non-preferred, egocentric strategy
Discussion
In the first phase of our experiment, all dogs except one resorted to an allocentric strategy, when choosing where to perform the action demonstrated by their owners. Such preferential use of allocentric information may seem to contrast with previous findings of dogs relying preferentially on egocentric information when performing individual learning tasks (Fiset et al. 2000, 2007). However, we exposed dogs to a social learning context, in which the acquired information intrinsically relies on external factors (i.e., the model to learn from and his relationship with the environment) rather than on information gathered through the animal’s own experience. Thus it is possible that social learning favored the use of allocentric information. This is consistent with previous findings in similar experimental procedures suggesting that movement information controlling matching responses is encoded allocentrically (Ray and Heyes 2002). The preferential use of the allocentric strategy is also in agreement with findings on difficulties encountered by many species (Zentall 2006), including dogs (Topál et al. 2006; Huber et al. 2009; Fugazza and Miklósi 2015), in the imitation of body movements compared to object-related actions.
Procedural requirements could also explain the preferential use of the allocentric strategy in this context. In the present study, dogs were required to learn from humans and the differences in the body schema of the two species may have further favored the acquisition of allocentric information. So far, no study has investigated whether dogs’ imitative performance differs with a conspecific versus a human demonstrator, although both dogs and wolves learn from humans as well as from conspecifics in a local enhancement task (Range and Viranyi 2013). More importantly, after the demonstration, dogs varied their position, making several movements and losing visual contact with the targets, before returning to the recall position. This likely increased the amount of egocentric information dogs experienced, thereby favoring the use of allocentric cues. Indeed, allocentric strategies seem to be preferred in dogs if a disruption in the direct visual relationship between the dog and the target occurs (Fiset et al. 2000), and if the spatial task increases in complexity (Fiset et al. 2007).
When the allocentric strategy was no longer suitable to solve the task, all dogs were able to resort to using egocentric information. Considering the limited number of combinations for demonstration and recall positions, dogs could theoretically have solved this task by learning the correct response for each combination based on the relative position of target and objects and without actually using egocentric information. However, the very small number of trials needed to reach criterion by many dogs, which in several cases included no wrong trials, argues against such alternative explanation.
Previous studies in individual learning situations have pointed out dogs’ great flexibility in responding to changes in the spatial requirements of tasks (e.g., Mongillo et al. 2013; Fiset et al. 2000). Our results confirm that such flexibility also applies to the context of social learning.
Finally, our male dogs were faster than females in resorting to the egocentric strategy. In humans as well as in non-human animals, males often outperform females in spatial abilities (e.g., Astur et al. 2004; Healy et al. 2009). Studies also report a greater tendency in females to rely on landmarks for navigation (e.g., Herman and Wallen 2007); accordingly, females seem to pay greater attention to visual information than males (Jones and Healy 2006), not only in the spatial domain, a difference that might be present also in dogs (Müller et al. 2011; Mongillo et al. 2016). To acquire the egocentric strategy in our test, dogs had to ignore salient visual information (i.e., the allocentric cues) and rely only on information about body movement. Thus, it is possible that a stronger tendency in females to rely on landmarks or, more broadly, on salient visual information affected their ease of resorting to the egocentric strategy. A proposed explanation for sexually dimorphic spatial abilities relies on differences linked to sex-specific reproductive commitments, shaped by sexual selection (Ecuyer-Dab and Robert 2004). In line with this hypothesis, sex-related differences in dogs’ ability to exploit spatial information could be grounded in the polygynous nature of the species, where the maximum potential reproductive rate, and connected behavioral strategies, differs markedly between males and females. For instance, as males’ reproductive success is maximized by an efficient localization of potential mates, the ability to readily exploit different types of spatial information would be particularly advantageous for males, but less so for females. While our data cannot provide support to this potential explanation, the hypothesis represents an interesting ground for further research.
Conclusions
Contrary to findings related to individual learning, our results indicate that dogs rely preferentially on allocentric cues when recalling socially acquired spatial information. However, in both situations, dogs are impressively flexible and switch from one to the other strategy according to the task requirements. The finding that dogs can easily resort to an egocentric strategy in a Do as I Do task is particularly relevant, since it implies the ability to take the perspective of others (i.e., of the model), an ability also implied in some forms of imitation (Zentall 2006). Whether preference for an allocentric strategy in processing spatial information is embedded in the nature of social learning, or restricted to our paradigm, remains an open question.
This study also provides the first evidence of sex differences in spatial cognition in dogs, increasing the evidence that sex-based differences in cognitive functions are widespread in mammals, and calls for further investigations aimed at shedding light on the evolution, function and mechanisms of such differences.
References
Astur RS, Tropp J, Sava S, Constable RT, Markus EJ (2004) Sex differences and correlations in a virtual Morris water task, a virtual radial arm maze, and mental rotation. Behav Brain Res 151:103–115. doi:10.1016/j.bbr.2003.08.024
Ecuyer-Dab I, Robert M (2004) Have sex differences in spatial ability evolved from male competition for mating and female concern for survival? Cognition 91:221–257. doi:10.1016/j.cognition.2003.09.007
Fiset S, Gagnon S, Beaulieu C (2000) Spatial encoding of hidden objects in dogs (Canis familiaris). J Comp Psychol 114:315–324
Fiset S, Beaulieu C, LeBlanc V, Dubé L (2007) Spatial memory of domestic dogs (Canis familiaris) for hidden objects in a detour task. J Exp Psychol 33:497–508. doi:10.1037/0097-7403.33.4.497
Fugazza C, Miklósi Á (2014) Deferred imitation and declarative memory in dogs. Anim Cogn 17:237–247. doi:10.1007/s10071-013-0656-5
Fugazza C, Miklósi A (2015) Social learning in dog training: the effectiveness of the Do as I Do method compared to shaping/clicker training. Appl Anim Behav Sci 171:146–151. doi:10.1016/j.applanim.2015.08.033
Fugazza C, Pogány Á, Miklósi Á (2015) Do as I … Did! Long-term memory of imitative actions in dogs (Canis familiaris). Anim Cogn 19:263–269. doi:10.1007/s10071-015-0931-8
Fugazza C, Pogány Á, Miklósi Á (2016) Spatial generalization of imitation in dogs. J Comp Psychol 130:249–258. doi:10.1037/com0000033
Healy SD, Bacon IE, Haggis O, Harris AP, Kelley LA (2009) Explanations for variation in cognitive ability: behavioural ecology meets comparative cognition. Behav Process 80:288–294. doi:10.1016/j.beproc.2008.10.002
Herman RA, Wallen K (2007) Cognitive performance in rhesus monkeys varies by sex and prenatal androgen exposure. Horm Behav 51:496–507. doi:10.1016/j.yhbeh.2007.01.005
Huber L, Range F, Voelkl B, Szucsich A, Virányi Z, Miklósi Á (2009) The evolution of imitation: what do the capacities of non-human animals tell us about the mechanisms of imitation? Phil Trans R Soc B 364:2299–2309. doi:10.1098/rstb.2009.0060
Jones CM, Healy SD (2006) Differences in cue use and spatial memory in men and women. Proc R Soc B 273:2241–2247. doi:10.1098/rspb.2006.3572
Kubinyi E, Pongrácz P, Miklósi Á (2009) Dog as a model for studying conspecific and heterospecific social learning. J Vet Behav Clin Appl Res 4:31–41. doi:10.1016/j.jveb.2008.08.009
Mongillo P, Araujo J, Pitteri E, Carnier P, Adamelli S, Regolin L, Marinelli L (2013) Spatial reversal learning is impaired by age in pet dogs. Age 35:2273–2282. doi:10.1007/s11357-013-9524-0
Mongillo P, Pitteri E, Candaten M, Marinelli L (2016) Can attention be taught? Interspecific attention in dogs (Canis familiaris) performing obedience tasks. Appl Anim Behav Sci 182:30–37. doi:10.1016/j.applanim.2016.05.018
Müller CA, Mayer C, Dörrenberg S, Huber L, Range F (2011) Female but not male dogs respond to a size constancy violation. Biol Lett 7:689–691. doi:10.1098/rsbl.2011.0287
Range F, Viranyi Z (2013) Social learning from humans or conspecifics: differences and similarities between wolves and dogs. Front Psychol 4:868. doi:10.3389/fpsyg.2013.00868
Ray E, Heyes C (2002) Do rats in a two-action test encode movement egocentrically or allocentrically? Anim Cogn 4:245–252. doi:10.1007/s10071-002-0154-7
Topál J, Byrne R, Miklósi Á, Csányi V (2006) Reproducing human actions and action sequences: “Do as I Do!” in a dog. Anim Cogn 9:355–367. doi:10.1007/s10071-006-0051-6
Zentall TR (2006) Imitation: definitions, evidence, and mechanisms. Anim Cogn 9:335–353. doi:10.1007/s1007-006-0039-2
Acknowledgements
This study was funded by the University of Padua (CPDA144871/14). Dr. Claudia Fugazza received a post doc grant (CPDR148844) from the University of Padua. We are very grateful to Pamela Sambugaro for assistance with data collection and all the dogs’ owners volunteering this study.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interests.
Ethical standards
All procedures performed in the present study were in accordance with the ethical standards of the University of Padua and Italian law. No specific permission was required, given the nature of the study.
Rights and permissions
About this article

Cite this article
Fugazza, C., Mongillo, P. & Marinelli, L. Sex differences in dogs’ social learning of spatial information. Anim Cogn 20, 789–794 (2017). https://doi.org/10.1007/s10071-017-1099-1
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10071-017-1099-1