
Abstract
Understanding the intentions of others is crucial in developing positive social relationships. Comparative human and non-human animal studies have addressed the phylogenetic origin of this ability. However, few studies have explored the importance of motion information in distinguishing others’ intentions and goals in non-human primates. This study addressed whether squirrel monkeys (Saimiri sciureus) are able to perceive a goal-directed motion pattern—specifically, chasing—represented by two geometric objects. In Experiment 1, we trained squirrel monkeys to discriminate a “Chasing” sequence from a “Random” sequence. We then confirmed that this discrimination transferred to new stimuli (“Chasing” and “Random”) in a probe test. To determine whether the monkeys used similarities of trajectory to discriminate chasing from random motion, we also presented a non-chasing “Clone” sequence in which the trajectories of the two figures were identical. Three of six monkeys were able to discriminate “Chasing” from the other sequences. In Experiment 2, we confirmed humans’ recognition of chasing with the stimuli from Experiment 1. In Experiment 3, the three monkeys for which discrimination did not transfer to the new stimuli in Experiment 1 were trained to discriminate between “Chasing” and “Clone” sequences. At testing, all three monkeys had learned to discriminate chasing, and two transferred their learning to new stimuli. Our results suggest that squirrel monkeys use goal-directed motion patterns, rather than simply similarity of trajectory, to discriminate chasing. Further investigation is necessary to identify the motion characteristics that contribute to this discrimination.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
An accurate interpretation of the intentions of others allows individuals to establish positive social relationships in daily life. We usually use the apparent behavior of others to infer intentions or social causalities. For many species, the ability of an individual to identify social events, such as hunting prey, avoiding predators, and mating, is crucial to survival and adapting in life. To date, many researchers have studied how humans recognize intentions and social causalities. Interestingly, humans are able to interpret animated movements of simple geometric shapes as depicting social events (social attribution). For instance, Heider and Simmel (1944) demonstrated that three simple geometric figures (a large triangle, a small triangle, and a small circle) moving around a rectangle could be used to communicate social interactions (e.g., chasing or fighting) to human adult participants. Moreover, human infants have been found to prefer similar displays representing chasing, suggesting that sensitivity to motion information representing social causality is hardwired from birth (Frankenhuis et al. 2013; Rochat et al. 1997). These displays can be used to evoke animacy traits (i.e., motion characteristics of animals) such as self-propulsion (Premack 1990) or goal-directedness (Opfer 2002), and psychological traits, such as intentions (Barrett et al. 2005; Dasser et al. 1989; Dittrich and Lea 1994) or emotions (Kanakogi et al. 2013; Rimé et al. 1985). Many follow-up studies using Heider-esque animation have confirmed the importance of motion information (Barrett et al. 2005; Gao et al. 2009, 2012; Gao and Scholl 2011; Santos et al. 2008; Schultz et al. 2005). This type of schematic display is well suited for analyzing the role of motion information in social cognition, as researchers are able to easily control the motion components of the stimuli.
Human adults often attribute mental states to Heider-esque animations and represent social relationships between the agents engaged in the event. From early stages of life, we attribute animacy traits such as goal-directedness to moving geometric objects (Gergely et al. 1995). Opfer (2002) defined “goal” as any object, state, or location toward which an entity contingently directs its self-movement. Unlike psychological attribution, detecting goals of agents consists of associating physical properties between the entities. For humans in early infancy, understanding goals seems to bridge a gap between mechanical causality and the later emergence of mental reasoning (Gergely and Csibra 2003). However, the phylogenetic origin of goal attribution is still unclear.
A small number of non-human animal studies have explored the role of motion information in the interpretation of animated motion of geometric figures. These include studies with chicks (Gallus gallus domesticus; Mascalzoni et al. 2010), pigeons (Columba livia; Goto et al. 2002), and Japanese macaques (Macaca fuscata; Tsutsumi et al. 2012). Chimpanzees (Pan troglodytes) are particularly prone to attribute a goal to inanimate geometric entities (Uller and Nichols 2000; Uller 2004). However, the role of motion information in the perception of motion patterns, such as chasing, in non-human animals remains unclear. Comparing motion interpretation of non-human animals and humans may lead to information about how humans attain this cognitive ability and about its evolutionary origins.
In the present study, we explored the perception of chasing in a scenario in which two moving geometric particles engaged in goal-directed motions. One of the convincing ways to reveal whether the animal can perceive goal-directedness is to demonstrate an innate distinctive behavior in their response to such stimuli. To our knowledge, such distinctive behavior of non-human animals has only been demonstrated in chimpanzees by using their looking behavior (Uller and Nichols 2000; Uller 2004), and another non-human animal (the pigeon) has shown lower sensitivity to goal-directed motion events. Researchers who used Heider-esque animation found that these animals had difficulty discriminating between goal-directed motion, such as stalking, and random motion (Goto et al. 2002). This kind of stalking event consisted of an animated agent’s depicting the goal-directed stalking behavior and an inanimate, meaningless target’s moving randomly. In this case, the pigeons could have used only one discriminative cue (the goal-directed motion of the stalker); the fact that they did not do so suggests that the interaction between the agents is more convenient for the percept of animacy for these animals. Another type of motion that induces the perception of animacy is chasing, which involves two agents, i.e., a runner and a chaser. The two agents in a chasing event modify their motions based on the motions of the other, which suggests that the interaction between the two is salient. Non-human animals may be able to use the salient features of the runner and chaser to discriminate chasing in a motion pattern stimulus.
Here, we explored the perception of chasing in squirrel monkeys (Saimiri sciureus), which are a group-living primate species. We were especially curious about whether a specific physical property of movement contributed to the discrimination of chasing in monkeys. For example, when a runner changes its direction of motion, the chaser responds by altering its direction of motion to match that of the runner. Thus, there is a statistical correlation between the runner’s trajectory and the chaser’s location (Gao et al. 2009), indicating that the two trajectories are similar. However, in humans, perceived chasing has been found to be more complex than would be predicted by perception of correlated motions (Gao et al. 2009, 2012).
For non-human primates, the “similarity” between trajectories may be a salient cue that can be used to discriminate chasing from meaningless random motion depicted by simple geometric figures. If so, monkeys may perceive chasing as a motion encompassing two particles with similar trajectories, rather than as goal-directed motion. In the natural world, some group-living species exhibit highly correlated movements (such as gnu group behaviors or sardine migration). In such cases, animals may move together with their group members because they share a goal (such as traveling to a watering place or hunting prey), rather than because they are engaged in chasing behaviors. Thus, we hypothesized that non-human primates would be able to discriminate between two types of stimuli: chasing and other highly correlated motion.
To examine our hypothesis, we introduced another type of highly correlated movement (“Clone” scenario) to the present study. In Experiment 1, we trained monkeys to discriminate chasing from random motion (correlated vs. uncorrelated motion), and then tested whether they could discriminate chasing from a motion pattern with a high correlation between the trajectories (correlated vs. very highly correlated motion). In Experiment 2, human observers participated, and we analyzed the goal-directed impression in each stimulus from the previous experiment and compared the results with the monkey’s discriminative behaviors. In Experiment 3, we used similar stimuli to those of Experiment 1, but the monkeys were trained to discriminate between the two types of correlated motion.
Experiment 1
Method
Subjects
Seven adult male common squirrel monkeys (Saimiri sciureus), Kazusa, Milka, Niki, Buzz, Jojo, Misosoup, and Kai participated in this study. The monkeys were housed alone, one per cage, but were allowed visual and auditory communication with monkeys housed in other cages within the same room. The monkeys were not food-deprived, but a daily food ration was withheld until daily sessions were complete. All experimental protocols were approved by the Institutional Animal Care and Use Committee at Rikkyo University.
Apparatus
Each monkey was trained in an operant conditioning box (25 cm wide, 31 cm long, and 34.5 cm high). Each box was located in a dark, sound-attenuating chamber with continuous white noise. The front wall of the box had an opening (15 cm wide and 17 cm high) that was covered with a transparent acrylic panel, which had a hole (3 cm diameter) in the center. An infrared touch panel (Elo TouchSystems, Menlo Park, CA, USA) was placed between the front wall and a 17-inch CRT monitor, which was used for stimulus presentation. A food dispenser (BiO MEDICA, Osaka, Japan) in the sound-attenuating chamber delivered comminuted peanuts through a tube into a food cup mounted on the front wall of the box. The chamber was illuminated during each session by a house light mounted on the center of the ceiling. The house light and feeder were controlled by a PCI-DIO-96 interface board (National Instruments, Austin, TX, USA). We used the Vision Shell PPC programming library (Comtois 2003), run on an Apple® Macintosh Power Mac G4 computer, to generate the stimuli and control the experimental procedure.
Stimuli
The stimuli comprised five movie clips (two for training, and the other three for test sessions). Each movie contained two round black particles (1 cm diameter), which moved on a white square (15 cm wide and 15 cm high). At the beginning of each trial, the particles were displayed at the center of the square with a space of 3 cm between them. After the particles appeared, they immediately began moving at a constant speed of 29 mm/s. The movies played at a rate of 30 frames per second.
Of the two movies used in the training sessions, one depicted “Chasing” and the other depicted “Random” stimuli. In the Chasing movie, one particle was assigned as a runner and the other as a chaser (Fig. 1a). The runner moved randomly but appeared to avoid the chaser, such that its motion direction was randomly directed toward the spaces not occupied by the chaser. When the movie started to play, during the first 15 frames, the chaser moved to the first position of the runner. Then the chaser continued to move along the trajectory of the runner with a 15-frame delay. The two particles shared an identical path with a temporal gap, producing a stable relationship between them to depict this as a chasing event. The Random stimulus movie contained two random moving particles (Fig. 1b). In the test sessions, we introduced new movie clips with new trajectories. Additionally, we added another type of stimulus, the “Clone” (Fig. 1c). In this movie clip, the trajectories of the two particles were always the same (i.e., the motion of one particle seemed to copy that of the other), and the distance between them did not change.

Schematic images of the three types of displays used in this study. Each display contains two particles that move along specified trajectories. The dotted arrows represent the trajectories of the particles, and did not actually appear on the screen. a Chasing stimulus one particle was designated as a runner and the other as a chaser. The runner moved randomly, while the chaser moved along the same trajectory as the runner, with a 15-frame delay (see also Video 1 for a clip of this animation). b Random stimulus the particles moved randomly, and their two trajectories were completely different (see Video 2). c Clone stimulus one particle moved randomly, and the other copied its motion (see Video 3)
For the Random stimulus, the particles moved haphazardly and randomly changed direction within a 240° window every 167 ms in both the training and the testing sessions. Both the chaser in the Chasing stimulus and one particle in the Clone stimulus also moved randomly. All random motions were constrained by the specification that the two particles would neither come into contact with each other nor overlap. We evaluated the similarities in the particle trajectories based on correlations between the object coordinates at each frame of the sequence. We calculated the degree of similarity between two trajectories using Pearson’s correlation coefficients. First, we calculated the correlation coefficients between the horizontal positions of each particle during the entire sequence and between the vertical positions; the average of the two correlation coefficients was defined as the degree of similarity of the stimulus trajectories. The particles in the Chasing stimuli had a high degree of similarity (training stimulus: 0.65, test stimulus: 0.71), and completely different trajectories for random movements (training and test: 0.00). The trajectories were identical in the Clone stimulus; therefore, the degree of similarity was maximal (1.00).
Procedure
Training
Four monkeys (Kazusa, Milka, Niki, and Kai) were arbitrarily assigned to the Chasing-positive group, in which responses to the chasing movement were rewarded (i.e., positive stimulus), and three monkeys (Buzz, Jojo, and Misosoup) were assigned to the Random-positive group, in which responses to the random movement were rewarded. We trained the monkeys using a go/no-go discrimination procedure. Each trial began with the presentation of a red square start key (30 mm wide and 30 mm high) at the center of the display. The square disappeared after it was touched, and the stimulus (Chasing or Random) immediately started playing. Responses to the movie were disregarded during the first 4 s of each trial. After the 4-s period, an orange frame appeared around the stimulus and responses to the stimulus were monitored. If the monkey touched a positive stimulus or made no response to a negative stimulus, the display turned black, food reinforcement was delivered, and an inter-trial interval (ITI) began. If the monkey touched a negative stimulus or made no response to a positive stimulus, a buzzer sound was delivered and the display and house light went out for 6 s (time-out). After a time-out, the monkey had to complete one or more correction trials until it made the correct response. If the percentage of correct trials was lower than that on the previous day, the time-out duration was extended from 6 s to a maximum of 30 s. Each positive stimulus trial lasted for a maximum of 12 s, and each negative stimulus trial lasted for maximum of 8 s. These asymmetric trial durations were introduced because we expected that monkeys would have difficulty suppressing their responses to the negative stimulus. After the first 4 s had passed, the positive stimulus trials were terminated either by the end of the 8-s period or by the monkey’s response to the stimulus. After the initial 4 s of the negative stimulus, the trials continued for an additional 4 s unless the monkey responded to the stimulus during that time. The ITI lasted for a minimum of 3 s, but if the monkey responded to a positive stimulus, the subsequent ITI was temporarily extended by the time difference between the maximum trial duration (i.e., 12 s) and the reaction time. Each daily training session contained two blocks of 48 trials (96 trials in total). Each stimulus was presented in a pseudo-random sequence, constrained so that the Chasing and Random stimuli never appeared more than three times continuously. Training continued until the monkeys reached a criterion of at least 80 % correct over two consecutive sessions. The monkeys proceeded to testing immediately after reaching the criterion. Note that the correction trials and occasional incomplete sessions were not analyzed.
Testing
The monkeys were presented with 132 trials per test session (total of five sessions). The first 24 trials involved 12 presentations of each training stimulus. These were treated as warm-up trials and were not used in the data analysis. The following 108 trials were separated into two blocks; each block (54 trials) included 48 presentations of two training stimuli (baseline trials) and six presentations of three testing stimuli (testing trials). In the baseline trials, the procedures were identical to the trials in the training session. In the testing trials, the trial lasted for a maximum of 12 s, and the monkeys were not given any food rewards or penalties. The trials in each block were presented in pseudo-random order. The response ratio was calculated from the number of responses.
Results and discussion
Training
The six monkeys completed a mean of 26.33 training sessions (range 5–44 sessions). One monkey, Kai, did not finish the discrimination training (22 sessions in total) within this research period; so the data from this monkey were not used for further analysis. Before analysis of the results in testing, we confirmed the total session numbers until reaching the criterion and compared the two subject groups. A Mann–Whitney U test revealed no difference between the two groups (Chasing-positive group, mean 26.67 sessions, SD 15.37; Random-positive group, mean 26 sessions, SD 13.37, p = 1.00).
Testing: reaction time
In our task, an asymmetric time setting between positive and negative stimulus trials was employed (positive stimulus trials lasted 12 s, while negative stimulus trials lasted 8 s maximum). Therefore, there was a possibility that the monkeys learned to respond to every stimulus that lasted more than 8 s (the responses occurred within the first 4 s were ignored in all trials). We first analyzed whether the subjects responded within 4 s from the onset of the orange frame illumination on the monitor in all trials. One-sample two-tailed Mann–Whitney U tests revealed the response times of 4 monkeys (Kazusa, Milka, Jojo, and Misosoup) were significantly earlier than the criterion (p < 0.01), although the remaining two monkeys responded after the 4-s period (Niki and Buzz, p < 0.01). In the testing trials (the conditions which were identical to the positive stimulus for each subjects), three monkeys responded within the period (Kazusa and Misosoup: p < 0.01; Jojo: p = 0.09), and Milka responded on time (p = 0.47). On the other hand, Niki and Buzz responded after the duration (p = 0.07; p = 0.01, respectively).
Chasing-positive group
Figure 2 indicates the percentage of correct responses to the training stimulus and choice responses to the testing stimuli. In the baseline trials in the Chasing-positive group (Fig. 2, left), the monkeys obtained a correct ratio of greater than 80 % (one-sample t test, t 14 = 2.52, p = 0.02, r = 0.56, confidence interval (CI) [80.86, 90.78]). We conducted two-tailed binomial tests to estimate significant departures of performance from chance levels in the testing trials. The percentages of choice responses in the Chasing and Clone trials were significantly greater than chance (p < 0.01). The performance in the Chasing trials was identical to the performance in the baseline trials (two-tailed Wilcoxon signed-rank test, p = 0.79), but the one in the Clone trials was significantly lower than the baseline (p = 0.01). We found no significant difference between performance in the Random trials and chance (binominal test, p = 0.25). These results indicate that the choice responses of the monkeys in this group fully transferred to the Chasing stimulus, and partially to the Clone stimulus. To confirm the detailed differences in performance in the testing trials, we conducted further statistical analyses. A Friedman test showed a significant effect of testing stimuli (Χ 22 = 20.29, p < 0.01). Subsequent multiple comparisons by Steel–Dwass tests revealed significant differences in two comparisons: the percentage of choice responses in the Chasing trials was higher than that in the Random trials (p < 0.01), and the percentage of choice responses in the Clone trials was higher than that in the Random trials (p = 0.03). We found no significant difference between performance in the Chasing and Clone trials (p = 0.10). These results indicate that the monkeys discriminated the testing stimuli using the similarities between the two trajectories.

Results of the test sessions from each group in Experiment 1. The left panel shows performance for the Chasing-positive group; the right panel shows performance for the Random-positive group. The white bars indicate the percentage of correct responses in baseline trials, and the other bars represent the percentage of choice responses for each test stimulus. The dotted line represents chance level (50 %). The asterisks indicate significant departures from chance, estimated by two-tailed binomial tests (**p < 0.01; ***p < 0.001). Error bars represent the standard errors of the mean
Random-positive group
Figure 2 (right) shows the results for the Random-positive group. Three monkeys (Buzz, Jojo, and Misosoup) formed this group, and their performance in the baseline trials was greater than 80 % correct (one-sample t test, t 14 = 5.94, p < 0.01, r = 0.85, CI [86.75, 94.37]). In the testing trials, the percentage of choice responses to Chasing was significantly lower, and to Random significantly higher than chance (binomial tests, p < 0.01). The performance in the Random trials was identical to the performance in the baseline trials (Wilcoxon signed-rank test, p = 0.12). We found no significant differences between performance in the Clone trials and chance (binomial test, p = 0.37). A Friedman test showed a significant effect of testing stimuli (Χ 22 = 20.29, p < 0.01). We found significant differences in two comparisons by Steel–Dwass method: performance in the Random trials was higher than that in the Chasing trials (p < 0.01), and performance in the Clone trials was higher than that in the Chasing trials (p = 0.04). We found no significant differences between performance in the Random and Clone trials (p = 0.16). The results for this group indicate that the monkeys did not discriminate between the testing stimuli using only the similarities between two trajectories.
We confirmed that the discrimination behavior transferred to the testing stimulus in the Chasing and Random trials, but we found different response patterns for the testing stimuli between the two groups. The experimental procedure was the same in the two groups except for the reinforcement contingency; therefore, we analyzed the data from each individual.
Testing: individuals
Figure 3 exhibits the results for each individual in each testing session. One-sample two-tailed Mann–Whitney U tests revealed performances of three monkeys in the baseline trials were greater than the 80 % correct ratio (Kazusa; p = 0.05, Misosoup; p = 0.06, Jojo; p = 0.06). Performances of the other three monkeys were identical to the criterion (Milka; p = 1.00, Niki; p = 0.78, Buzz; p = 0.59).

Results of test sessions for each individual in Experiment 1. The left panel shows the performance of each individual in the Chasing-positive group; the right panel shows the performance of each individual in the Random-positive group. The white bars indicate the percentage of correct responses in baseline trials, and the others indicate the percentage of choice responses made for each test stimulus. The dotted line represents chance level (50 %). Asterisks indicate significant departures from chance, estimated by two-tailed binomial tests (*p < 0.05; **p < 0.01; ***p < 0.001). Error bars represent standard errors of the mean
In the Chasing-positive group, two-tailed binomial tests revealed that three monkeys chose Chasing at a rate that was significantly higher than chance in the testing trials (p < 0.05). Their performances in the Chasing trials did not differ from the baseline trials (two-tailed Wilcoxon signed-rank tests, Kazusa: p = 0.25; Milka: p = 0.31; Niki: p = 0.56). In particular, Kazusa chose the Clone stimulus more frequently than the chance (binomial test, p < 0.01), and the performance in the Clone trials was identical to his baseline (Wilcoxon signed-rank test, p = 0.75). In the Random-positive group, Misosoup chose Random at a rate that was higher than chance (binomial test, p < 0.01), and chose Chasing at a rate that was lower (p < 0.05). His performance in the Random trials was identical to the baseline (Wilcoxon signed-rank test, p = 0.13). Jojo did not show significant departure of the percentage of choice responses in the Random trials from the chance (binomial test, p = 0.12). However, his performance in the Chasing trials was significantly lower than the chance (p < 0.01), and this performance was identical to the error ratio in his baseline trials (Wilcoxon signed-rank test, p = 0.63). This indicates that Jojo successfully learned to avoid responding to Chasing scenarios. This behavior completely transferred to the Chasing, but not to the Clone stimulus in the testing. In Buzz, the percentages of choice responses in the Random and Clone trials significantly greater than the chance (binomial test, p < 0.05), and these performances were identical to the correct ratio in the baseline trials (Wilcoxon signed-rank tests, p = 0.13; p = 0.44, respectively). An additional one-way Friedman test revealed significant effects of testing stimuli for each subject (Kazusa: Χ 22 = 6.53, p = 0.04; Milka: Χ 22 = 9.50, p < 0.01; Niki: Χ 22 = 8.59, p = 0.01; Buzz: Χ 22 = 6.62, p = 0.04; Jojo: Χ 22 = 5.77, p = 0.06; Misosoup: Χ 22 = 9.00, p = 0.01). We conducted subsequent multiple comparisons using Steel–Dwass test and found significant differences between the Chasing and Random trials for all subjects (Kazusa: p = 0.04; Milka: p = 0.06; Niki: p = 0.05; Buzz: p = 0.04; Jojo: p = 0.02; Misosoup: p = 0.01). However, we found significant differences between the Chasing and Clone trials in Milka and Misosoup (p = 0.05).
Our analysis of data from each individual revealed that the learned discrimination transferred to the Chasing and Random stimuli in the testing trials in all subjects. One monkey in the Chasing-positive group (Milka) and the two in the Random-positive group (Jojo and Misosoup) discriminated between the Chasing and Clone scenarios in the test trials. These results suggest that differences did not exist between groups but between subjects. The results from the three monkeys that discriminated between the Chasing and Clone scenarios indicate that they did not learn to discriminate only using the similarities between the trajectories of two particles. However, our results for the remaining three monkeys (Kazusa, Niki, and Buzz) suggest that they used this physical feature, or time differences between the positive and negative trials for discrimination. There was a possibility that the Chasing scenario employed in the testing was not enough to evoke “chasing” impressions. A subsequent experiment was conducted to examine how humans evaluate the test stimuli.
Experiment 2
In Experiment 1, three out of six monkeys (Milka, Jojo, and Misosoup) discriminated between Chasing and Clone motion, but the other three subjects (Kazusa, Niki, and Buzz) did not. How did the monkeys perceive the movies? To confirm the representation of the events depicted in Experiment 1, at least for humans, we presented the same stimuli to human participants. We explored how they rate chasing impressions on the basis of the intensity of goal-directedness in each test stimulus.
Method
Subjects
Five human adults (one male) with normal or corrected-to-normal vision participated. This experiment was approved by the Human Research Ethics Committee of the Primate Research Institute, Kyoto University, and written informed consent was obtained from all participants.
Apparatus
The monitor and computer were identical to those used in Experiment 1. A keypad was additionally employed for obtaining the responses of participants.
Stimuli
We used the same testing stimulus conditions as in Experiment 1.
Procedure
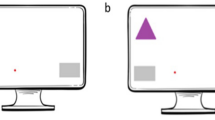
In each trial, a paired comparison between two out of the three stimuli was sequentially presented one by one on the display (serial presentation paradigm). Each trial began with the presentation of a white fixation point at the center of the display. The shape disappeared after the participant pressed any key, and one stimulus of the pair (the Chasing, Random, or Clone employed in the testing of Experiment 1) immediately started playing. After the movie finished, the other stimulus started playing with 3–5 s random delay. Each movie lasted for 10 s. In each trial, the participants were required to select the movie with higher intensity of goal-directedness. Before experiments, the participants were asked to choose one of the movies, in which one particle moved so that it could get closer to the other one in every trial. Each participant experienced one 30-trial session in which all combinations were presented repeatedly. From the responses of participants, the relative intensities of perceived goal-directedness in each test stimulus were calculated by using the Batchelder–Bershad–Simpson (BBS) scaling method, which is based on Thurstone’s paired comparisons model (Jameson et al. 1999). The relative intensities were then analyzed statistically.
Results and discussion
Figure 4 shows the mean ratings for all participants. A one-way ANOVA revealed that the main effect of intensity was significant (F 2, 12 = 24.83, p < 0.01, η 2 p = 0.86), and the subsequent multiple comparisons with Bonferroni correction showed significant differences in two comparisons, and the intensity of goal-directedness in the Chasing sequence was higher than in the Random and the Clone sequences (p < 0.01, CI [−12.57, −6.43]; p < 0.01, CI [−10.29, −4.15], respectively). We found no significant differences between the Random and the Clone scenarios (p = 0.31, CI [−0.79, 5.35]). The results in naïve human participants indicate that the Chasing sequence employed in Experiment 1 was suitable to test the perception of goal-directedness in the monkeys. The results in Experiments 1 and 2 suggest that three out of six monkeys and humans used the same cue in the stimuli to perform each task.

Goal-directedness ratings by human participants (N = 5). Each bar indicates the relative intensity of the impression for each scenario from Experiment 1. Asterisks indicate significant difference estimated via one-way repeated measures ANOVA (**p < 0.01). Error bars represent the standard deviation of the mean
Experiment 3
Because in Experiment 1, just three of the six monkeys (Milka, Jojo, and Misosoup) discriminated between Chasing and Clone motion, we sought to investigate the source of these conflicting findings. Human naïve participants had evaluated the goal-directedness in the Chasing scenario as highest; therefore, it was difficult to conclude that the inconsistent results with the monkeys were due to the stimulus properties alone. We hypothesized that the three monkeys who failed to discriminate Chasing and Clone motion used a different learning strategy (responding to a specific stimulus, rather than to the similarity of trajectories, and/or behaving on the basis of the differences of time duration between the trials). In Experiment 3, we trained Kazusa, Niki, and Buzz to discriminate between Chasing and Clone scenarios. In this experiment, we used the same training and testing procedures as in Experiment 1. Same stimulus conditions (Chasing, Random, and Clone) were presented, but the trajectories and the movement characteristics of the two particles in each movie were changed. In Experiment 1, the motion directions of the two particles in the Chasing scenario were often consistent for a short period and the Clone scenario shared this characteristic, so the Chasing stimuli might have appeared to be similar to the Clone stimuli during this period. To address this limitation, in the present experiment, the changes in direction of the particles in each stimulus occurred more frequently so as to emphasize the distinction between Chasing and Clone movement.
Method
Subjects
Kazusa, Niki, and Buzz participated in Experiment 3. Kazusa and Niki (Chasing-positive group in Experiment 1) were again assigned to the Chasing-positive group, and Buzz (Random-positive group in Experiment 1) was assigned to the Clone-positive group.
Apparatus
The apparatus was the same as that used in Experiment 1.
Stimuli
We used two training stimuli, Chasing and Clone, with different trajectories from those of Experiment 1. To explicitly differentiate the Chasing from the Clone stimuli, the moving particles in each scenario were adjusted such that they changed their direction of motion more frequently than in Experiment 1: a change in direction occurred every 111 ms for each particle. This new motion style was defined such that the motion directions of the two particles were always dissimilar during the Chasing scenario thus emphasizing the difference between the Chasing the Clone stimuli. We used the same testing stimulus conditions as in Experiment 1.
Procedure
The training and testing procedures were the same as in Experiment 1.
Results and discussion
Training
The three monkeys took a mean of five sessions (range 2–8 sessions) to complete the training.
Testing: reaction time
Kazusa (Chasing-positive) responded within 4 s in the positive stimulus trials of the baseline (a one-sample two-tailed Mann–Whitney U test, p < 0.01), and he did not behave after the 4-s period in the Chasing of the testing trials (p = 0.10). However, the other two monkeys (Niki, Chasing-positive; Buzz, Clone-positive) responded significantly later than the period in the baseline trials (p < 0.01). In addition, Niki reacted after the period in the Chasing of the testing trials (p = 0.04), and Buzz also did so in the Clone of the testing trials (p < 0.01).
Individuals
Figure 5 shows the results for each individual in the testing sessions. The performance of one monkey in the baseline trials was greater than the 80 % correct ratio (Mann–Whitney U test, Kazusa: p = 0.06), and the performances of the other two were identical to the criterion (Niki: p = 0.63; Buzz: p = 0.59). In Kazusa (Chasing-positive), the percentages of choice responses in the Chasing and Random trials were significantly higher than the 50 % chance level (binomial test, p < 0.01). Performance in the Chasing trials was greater than in the baseline trials (Wilcoxon signed-rank test, p = 0.06), and the choice ratio in the Random trials was identical to the baseline (p = 0.31). We found no significant differences between the percentage of choice responses to the Clone and chance (binomial test, p = 0.50). A one-way Friedman test revealed the effect of testing stimuli (Χ 22 = 5.20, p = 0.07). Subsequent multiple comparisons using Steel–Dwass test revealed that performance in the Chasing trials was significantly greater than that in the Clone trials (p = 0.05). We found no significant differences between the Chasing and Random trials (p = 0.58) and Random and Clone trials (p = 0.13). In Niki (Chasing-positive), the percentage of choice responses in the Chasing trials was significantly higher than chance (binomial test, p < 0.01). Performance in the Chasing trials was identical to the baseline (Wilcoxon signed-rank test, p = 0.63). We found no significant differences between Random/Clone scenarios and chance (binomial test, p = 1.00; p = 0.12, respectively). A Friedman test revealed a significant effect of testing stimuli (Χ 22 = 7.68, p = 0.02). Subsequent multiple comparisons by Steel–Dwass test revealed that performance in the Chasing trials was higher than that in the Random trials (p = 0.04). We found a difference between performance in the Chasing and Clone trials (p = 0.04), and no significant differences between the Random and Clone trials (p = 0.33). In Buzz (Clone-positive), the percentages of choice response in the Chasing, Random, and Clone trials were significantly higher than chance (binomial test, p < 0.01; p < 0.01; p = 0.04, respectively). In addition, the performances in these testing trials were identical to the baseline (Wilcoxon signed-rank test, p = 0.13; p = 0.31; p = 1.00, respectively). A Friedman test showed no significant effects of testing stimuli (Χ 22 = 3.50, p = 0.17).

Results of test sessions in each individual from Experiment 3. White bars indicate the percentage of correct responses in baseline trials; other bars indicate the percentage of choice responses for each test stimulus. The dotted line represents chance level (50 %). Asterisks indicate significant departures from chance, estimated via two-tailed binomial tests (*p < 0.05; **p < 0.01; ***p < 0.001). Error bars represent the standard error of the mean
These results indicate that Kazusa discriminated between the Chasing and Clone in testing trials; however, he chose the Random scenario significantly more frequently than chance. This suggests that Kazusa performed the training task by choosing all the stimuli except for the negative stimulus, the Clone scenario. During testing, Niki responded to stimuli after the 4-s period in the baseline and the Chasing of testing trials as same as in Experiment 1. However, he chose the Random scenarios at a chance level and also discriminated Chasing–Clone in testing trials. These suggest that he acquired the discrimination between the Chasing, Random, and Clone stimuli rather than the time-based discrimination. In Buzz, the responses fully transferred to all the novel stimuli, and he responded after the 4-s period in the baseline and the Clone of testing trials. These suggest that Buzz learned to perform by focusing on the difference between the time duration of each trial.
General discussion
In the present series of experiments, we analyzed perception of chasing in squirrel monkeys using two simple moving geometric figures. In Experiment 1, we used two different reinforcement contingencies and found that the two subject groups exhibited inconsistent choice trends. In the Chasing-positive group, the monkeys had difficulty discriminating between Chasing and Clone, which involved two particles with highly similar trajectories. In the Random-positive group, however, the monkeys were able to distinguish between the two stimuli. A subsequent analysis revealed that the inconsistency between the two groups was caused by the choice trends of individuals, such that three of the monkeys (Milka, Jojo, and Misosoup) successfully differentiated between Chasing and Clone stimulus. We hypothesized that the inconsistencies in the results in the monkeys could be ascribed to unsuitable stimuli for the testing. A follow-up experiment (Experiment 2) was conducted in which humans confirmed our presumed intensities of goal-directedness for each of the stimuli employed in Experiment 1; that is, human participants showed that the intensity in the Chasing sequence was higher than that in the other two. In Experiment 3, we tested the monkeys (Kazusa, Niki, and Buzz) again to examine whether they used a particular learning strategy. We found that two of the three monkeys were able to successfully discriminate between Chasing and Clone stimuli.
In summary, five out of six squirrel monkeys were able to differentiate among the three types of simple geometric particle’s motion (Chasing, Random, and Clone) used in the present study. In the case of Buzz (Random-positive in Experiment 1, and Clone-positive in Experiment 3), performance in the Chasing and Clone trials was almost equivalent in both of the experiments. Throughout the experiments, his reaction times were longer than the 4-s period from the onset of the orange illumination. This indicates that Buzz acquired the strategy to perform the task by focusing on the time difference between the positive and negative stimulus trials. The other participants (Kazusa, Milka, Niki, Jojo, and Misosoup) successfully discriminated between the Chasing and Clone stimuli, suggesting that the squirrel monkeys could recognize each type of motion pattern and discriminate in spite of the similarity between the two particle trajectories. This finding is consistent with the human results in Experiment 2. Previous studies have also suggested that perception of chasing may require detection of a correlation between a runner and a chaser, but humans are able to differentiate chasing from other motion patterns with strong correlations (Gao et al. 2009). We used Clone motion, in which one moving particle copies the trajectory of another; that is, the two trajectories are maximally correlated. However, our data suggest that this type of motion is not perceived as Chasing motion by squirrel monkeys.
To distinguish Clone from Chasing motion, an observer must depend on specific cues in addition to the similarity of trajectories. In our study, half of the monkeys could perform the training task by focusing on the similarity of trajectories in Experiment 1. Our results indicate that other physical features might contribute to discrimination. Particularly in Experiment 3, the directions of motion of the runner and chaser were not congruent for most of the Chasing sequences; therefore, an important characteristic of chasing may be that the direction of the chaser’s movement is consistent with that of the runner. Another possible influence on performance has to do with the structures represented by the moving objects. A constant distance between the two moving objects in the Clone scenarios might facilitate the objects’ being perceived as a rigid unit. The monkeys who discriminated the Chasing from the Clone sequences might detect this perceptual specificity and easily perform the tasks. Furthermore, chasing events often seem to share some identical motion properties with “pulling” events; therefore, the monkeys might see the chasings as “pulling” scenarios. In chasing events, the runner and the chaser are autonomous agents, and they move independently, while in pulling events, one of the agents is not self-propelling. Future investigation is needed to elucidate how such physical characteristics contribute to the discrimination of chasing.
In the present study, five out of six monkeys differentiated chasing from the other sequences, and this discriminative behavior was similar to recognition of goal-directed impressions in humans. These results provide evidence to support the contention that squirrel monkeys can attribute a goal to inanimate agents. According our data, the perception of goal-directedness does not seem to be unique to humans and chimpanzees; it may be shared by various primates. The primate visual system probably has evolved to rely on motion information for detecting meaningful resources in environments. It appears that goal attribution has contributed to the emergence of mental reasoning in human evolution. However, inconsistencies in the results with the monkeys suggest that they processed the stimuli differently.
Human infants can attribute a goal to inanimate agents (Gergely et al. 1995; Gergely and Csibra 2003) and prefer to see Chasing events that consist of a runner and a chaser depicted by geometric figures (Frankenhuis et al. 2013; Rochat et al. 1997). Such sensitivity in human infancy to stimuli with animacy traits is adaptive for other social behaviors. Indeed, people with autism spectrum disorders (ASD) characterized by atypical social interaction styles show a lower sensitivity to social information, such as others’ eye-gaze (Gillespie-Lynch et al. 2013). Detecting animacy traits or social meanings from inanimate agents is also impaired in people with ASD (Klin 2000; McAleer et al. 2011; Rutherford et al. 2006). Do these impairments correlate with adaptabilities in non-human animals? Our study cannot answer this question directly. However, a visual preference for chasing events might reflect an innate sensitivity, which would suggest its adaptive value. We could assess such innate sensitivity to a chasing event by comparing ease of learning chasing versus non-chasing movement. We confirmed the total session numbers to reach criterion for each subject in Experiment 1, but we found no difference between the groups. In squirrel monkeys, the number of training sessions may or may not be an appropriate measure of sensitivity to a chasing event. If performances of the monkeys in the present study correlated with their social behaviors, this would constitute evidence of the adaptability value of the percept of goal-directedness in non-human animals. Our data were not sufficient to answer this point. Further studies to examine the relationship between the percept of goal-directedness and the behavioral repertoires of animals are necessary.
References
Barrett HC, Todd PM, Miller GF, Blythe PW (2005) Accurate judgments of intention from motion cues alone: a cross-cultural study. Evol Hum Behav 26:313–331
Comtois R (2003) Vision shell ppc [software libraries]. Raynald Comtois, Cambridge
Dasser V, Ulbaek I, Premack D (1989) The perception of intention. Science 243:365–367
Dittrich WH, Lea SE (1994) Visual perception of intentional motion. Perception 23:65–74
Frankenhuis WE, House B, Barrett HC, Johnson SP (2013) Infants’ perception of chasing. Cognition 126:224–233
Gao T, Scholl BJ (2011) Chasing vs. stalking: interrupting the perception of animacy. J Exp Psychol Hum Percept Perform 37:669–684
Gao T, Newman GE, Scholl BJ (2009) The psychophysics of chasing: a case study in the perception of animacy. Cognit Psychol 59:154–179
Gao T, Scholl BJ, McCarthy G (2012) Dissociating the detection of intentionality from animacy in the right posterior superior temporal sulcus. J Neurosci 32:14276–14280
Gergely G, Csibra G (2003) Teleological reasoning in infancy: the naïve theory of rational action. Trends Cognit Sci 7:287–292
Gergely G, Nádasdy Z, Csibra G, Bíró S (1995) Taking the intentional stance at 12 months of age. Cognition 56:165–193
Gillespie-Lynch K, Elias R, Escudero P, Hutman T, Johnson SP (2013) Atypical gaze following in Autism: a comparison of three potential mechanisms. J Neurodev Disord 43:2779–2792
Goto K, Lea S, Dittrich W (2002) Discrimination of intentional and random motion paths by pigeons. Anim Cogn 5:119–127
Heider F, Simmel M (1944) An experimental study of apparent behavior. Am J Psychol 57:243–259
Jameson K, Appleby M, Freeman L (1999) Finding an appropriate order for a hierarchy based on probabilistic dominance. Anim Behav 57:991–998
Kanakogi Y, Okumura Y, Inoue Y, Kitazaki M, Itakura S (2013) Rudimentary sympathy in preverbal infants: preference for others in distress. PLoS One 8:e65292
Klin A (2000) Attributing social meaning to ambiguous visual stimuli in higher-functioning autism and Asperger syndrome: the social attribution task. J Child Psychol Psychiatry 41:831–846
Mascalzoni E, Regolin L, Vallortigara G (2010) Innate sensitivity for self-propelled causal agency in newly hatched chicks. Proc Natl Acad Sci USA 107:4483–4485
McAleer P, Kay JW, Pollick FE, Rutherford MD (2011) Intention perception in high functioning people with Autism Spectrum Disorders using animacy displays derived from human actions. J Autism Dev Disord 41:1053–1063
Opfer JE (2002) Identifying living and sentient kinds from dynamic information: the case of goal-directed versus aimless autonomous movement in conceptual change. Cognition 86:97–122
Premack D (1990) The infant’s theory of self-propelled objects. Cognition 36:1–16
Rimé B, Boulanger B, Laubin P, Richir M (1985) The perception of interpersonal emotions originated by patterns of movement. Motiv Emot 9:241–260
Rochat P, Morgan R, Carpenter M (1997) Young infants’ sensitivity to movement information specifying social causality. Cognit Dev 74:537–561
Rutherford MD, Pennington BF, Rogers SJ (2006) The perception of animacy in young children with autism. J Autism Dev Disord 36:983–992
Santos NS, David N, Bente G, Vogeley K (2008) Parametric induction of animacy experience. Conscious Cognit 17:425–437
Schultz J, Friston KJ, O’Doherty J, Wolpert DM, Frith CD (2005) Activation in posterior superior temporal sulcus parallels parameter inducing the percept of animacy. Neuron 45:625–635
Tsutsumi S, Ushitani T, Tomonaga M, Fujita K (2012) Infant monkeys’ concept of animacy: the role of eyes and fluffiness. Primates J Primatol 53:113–119
Uller C (2004) Disposition to recognize goals in infant chimpanzees. Anim Cogn 7:154–161
Uller C, Nichols S (2000) Goal attribution in chimpanzees. Cognition 76:B27–B34
Acknowledgments
The authors are grateful to Yoshihisa Osada and Koji Hori for the laboratory setting. We would also like to thank Souta Hidaka and Nobuo Masataka for their valuable comments. We appreciate the insightful input of the anonymous reviewers and the journal editor on an earlier draft of this manuscript.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Supplementary material 1 (MPG 128 kb)
Supplementary material 2 (MPG 119 kb)
Supplementary material 3 (MPG 157 kb)
Rights and permissions
About this article

Cite this article
Atsumi, T., Nagasaka, Y. Perception of chasing in squirrel monkeys (Saimiri sciureus). Anim Cogn 18, 1243–1253 (2015). https://doi.org/10.1007/s10071-015-0893-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10071-015-0893-x