
Abstract
Domestic dogs (Canis familiaris) have been shown to actively initiate triadic communicative interactions by looking at a human partner or by alternating their gaze between the human and an object when being faced with an out-of-reach reward or an unsolvable problem. It has hardly been investigated, however, whether dogs flexibly adjust their human-directed behavior to the actions of their partners, which indicate their willingness and abilities to help them when they are faced with a problem. Here, in two experiments, we confronted dogs—after initially allowing them to learn how to manipulate an apparatus—with two problem situations: with an empty apparatus and a blocked apparatus. In Experiment 1, we showed that dogs looked back at their owners more when the owners had previously encouraged them, independently from the problem they faced. In Experiment 2, we provided dogs with two experimenters and allowed them to learn through an initial phase that each of the experimenters could solve one of the two problems: the Filler re-baited the empty apparatus and the Helper unblocked the blocked apparatus. We found that dogs could learn to recognize the ability of the Filler and spent time close to her when the apparatus was empty. Independently from the problem, however, they always approached the Helper first. The results of the present study indicate that dogs may have a limited understanding of physical problems and how they can be solved by a human partner. Nevertheless, dogs are able to adjust their behavior to situation-specific characteristics of their human partner’s behavior.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Changes in the pattern of looking at others are a main characteristic of the socio-cognitive development of human infants in their first year of life (Rochat and Striano 1999). Genetic predispositions like inborn preferences for face-like patterns and eye contact (Batki et al. 2000; Farroni et al. 2002) have been suggested to facilitate infants’ learning about others as well as about objects at this early age (Csibra and Gergely 2006; Johnson and Morton 1991). By the end of the first year of life, children’s gazing pattern associated with triadic situations involving child, adult, and objects gets more sophisticated. They flexibly and reliably direct adult attention to outside entities using communicative gestures and check whether the adult is paying attention to them by precisely coordinating their gazing between their partner, the object, and their manipulative actions (Carpenter et al. 1998). These joint attentional skills of children are thought to be the precursors of their later representational theories of mind (Wellman 1993) and may already reflect recognizing others’ attention and intentions (Tomasello 1995). Other authors emphasize the role of associative learning processes during regular infant–adult interactions that may—simply by rewarding the infant when looking at the adult or at the object—increase the frequency of these behaviors without any deep understanding of others’ intentions (Corkum and Moore 1998; Perner 1993). In support of both theories, it has been found that 7-month-olds, when encountering a novel object, repeatedly looked at an adult, but they did so independently from whether the adult was engaging in interaction with them or not. Only ten-month-old infants took into account whether the adult was paying attention to them (Striano and Rochat 2000). Accordingly, gazing of the older infants seems to reflect sensitivity to the partner’s direction of gaze, whereas the younger infants’ looking at the adult can be explained by less fine-tuned conditioning in earlier similar situations when they could profit from monitoring others’ faces. Apparently, genetic predispositions facilitate learning about others and objects across early human development. Through these learning processes, older infants come to a better understanding of when to expect certain actions from others in social interactions and are subsequently able to adjust their own behavior in a more sophisticated way to their partner’s engagement.
Dogs have also been reported to actively initiate triadic communicative interactions by looking at a human partner or alternating their gaze between the human and an object—either when indicating a reward hidden in a location out of their reach (Gaunet 2008, 2010; Hare et al. 1998; Miklósi et al. 2000) or when facing an instrumental problem difficult or unsolvable for them (Marshall-Pescini et al. 2008; Miklósi et al. 2003). Regarding the underlying mechanisms of this behavior, studies comparing its occurrence in domestic dogs and human-reared wolves have led authors to propose that—during the course of domestication—dogs evolved a genetic predisposition to look at humans or to quickly learn to do so, which is not present in wolves (Gácsi et al. 2009; Virányi et al. 2008). Additionally, dogs’ experiences with their human partners from early age on might also contribute to their preference to look back at them. Various studies have demonstrated that keeping conditions, general training, and reinforcement schedule can strongly influence the dog’s human-directed gazing behavior (Bentosela et al. 2008; Marshall-Pescini et al. 2009; Topál et al. 1997). Accordingly, associative learning processes are likely to play a crucial role in dogs’ readiness to look at humans in problem situations, which does not exclude, however, that through these learning processes, dogs also develop skills to adjust their behavior flexibly to others’ direction of attention and engagement in a given problem (Call 2001).
Regarding this fine-tuned behavioral coordination of dogs, it has been shown that dogs preferentially beg from a person who can see them in contrast to another one who turns away or whose eyes are covered (Gácsi et al. 2004). They alternate their gaze between a human partner and an out-of-reach toy more often if the person was not present when the toy was hidden and therefore does not know where the object is (Virányi et al. 2006). Apparently, guide dogs of blind owners—despite ample experience that their owners cannot see—cannot resist looking back at their owners when faced with a problem. However, in this situation, they additionally use sonorous mouth licking—a behavior which is perceivable for their blind owners (Gaunet 2008). Moreover, Gaunet (2010) showed that dogs continued to produce their human-directed behavior when they did not receive the solicited object from their human partner. Also, dogs that are used to cooperating with their owners in interactive dog sports look back at their owners more persistently when they cannot solve a problem on their own compared to pet dogs without such training (Marshall-Pescini et al. 2009). To what extent the above-described flexible use of human-directed gaze in dogs reflects cue-driven conditioned responses and to what extent it relies on understanding of the human’s intentions and other psychological states is hard to disentangle—just as it is in case of human infants. Still, investigating to what features of their partners’ actions dogs adjust their gazing behavior can inform us about their cognition and behavioral flexibility. The aim of our study was to investigate whether dogs would adapt their human-directed behavior to the actions of their human partners.
Experiment 1
In our first experiment, we tested whether dogs would adjust their human-directed gazing behavior to their owners’ previous encouragement, indicating owners' attention and interaction in the problem-solving situation. In two groups of dogs, we systematically manipulated owners’ responses to their dogs’ looks while the dogs learned to manipulate an apparatus. During an initial training phase, half of the owners were asked to encourage their dogs each time they looked back at them in the same way they usually use in daily interactions with their dogs to ensure them about their agreement and support. In the other group, the owners did not respond to the dog’s behavior in any way. Based on their experience in the initial training trials, we expected that if dogs learned about their owners’ responsiveness in this specific situation, previously encouraged dogs would look at their owners more often in the test trials than non-encouraged dogs, although not receiving encouragement anymore in those trials. If the dogs were insensitive to the owner’s behavior or their looking at the owner resulted from earlier experiences gained with their owners prior to the experiment (e.g., associating the owner with food, checking the owner’s reactions to ongoing events), they should equally look at the owner after both types of training.
Furthermore, we also investigated whether dogs would distinguish between two different problem situations. We examined whether they would look at their owners more often when faced with a novel problem situation that their owner could potentially solve (i.e., the apparatus was getting blocked during manipulation and thus the previously learned solution of the problem was not applicable anymore) in contrast to another problem situation with the same apparatus that the owner could not solve in the experimental setting (i.e., finding the apparatus empty when the owner had no food to fill it). If dogs perceived that in the one situation, there was a greater probability that the owner would interfere—because dogs might have experienced their owners providing inaccessible items (e.g., toys) during their everyday interactions—they should look at the owner more often when the apparatus was blocked compared to when it was merely empty. If, however, the dogs did not perceive that the owner was more likely to solve one specific problem, no difference would be expected in the looking behavior between the two test trials.
Materials and methods
Subjects
Forty-three dog–owner pairs were recruited from the list of volunteer participants of the Family Dog Research Program at the Department of Ethology of the Eötvös Loránd University in Budapest, Hungary. Only adult dogs permanently living together with the owner in the same household as pets were selected. All dogs had at least basic obedience training, and training levels were balanced across experimental groups. Seventeen dogs had to be excluded because they failed the pretest (see procedures section below), and one dog had to be excluded during testing because it attempted to damage the apparatus and the experiment had to be aborted. Therefore, 25 dogs completed the experiment. They comprised 17 males and 8 females ranging from 1.1 to 10.4 years of age (Mean ± SD = 4.50 ± 2.36 years). Dogs were 14 purebred dogs from six different FCI (Fédération Cynologique Internationale) breed groups (7 Sheepdogs, 1 Molossoid breed, 1 Terrier, 1 Scenthound, 2 Pointing dogs, 2 Retrievers) and 11 mixed-breed dogs. Two owners were men and 19 were women; four owners had two dogs participating in the experiment.
Apparatus
The apparatus consisted of two wooden discs screwed on top of each other (80 cm in diameter, upper disc 11 cm from the ground, see Fig. 1). Six round food containers (10 cm in diameter) were built into the lower disk with equal distance to each other. The upper disc could be rotated in one direction. A hole of the same size as the food containers in the upper disk allowed access to the food reward if the hole aligned with a food container on the lower disc. All odor cues were controlled for by fixing one piece of food to the backside of each container—out of reach for the dogs. The apparatus also comprised a blocking mechanism that—when activated—blocked the rotation of the upper disk after it had been turned 180° and fixed it in that position.

Schematic drawing of the apparatus used in Experiment 1 and Experiment 2, showing one of the six food containers on the lower disk and the blocking mechanism. Engaging the blocking mechanism would render the upper disk immobile after turning it 180°
Experimental setup
Testing took place in a quiet experimental room (3 m × 5 m) at the department. The experiments were carried out between January and March 2008. The experimental room was empty except for the apparatus and a chair for the owner. A grid on the floor marked sections of 1 × 1 m each. The chair on which the owner was seated throughout the experiment was situated approximately one meter away from the apparatus and facing it. Throughout the experiment, owners had to wear dark sunglasses but their head was always oriented to the apparatus. The door that was used by the owner to enter with the dog as well as by the experimenter to enter and exit the experimental room during trials was located behind the owner. The experimental room was equipped with four cameras connected to monitoring and recording equipment in the adjacent room, from where the experimenter could observe the dog and the owner during all phases of the experiment.
Procedures
All dogs had to pass a pretest in which they could manipulate the apparatus to ensure that they were motivated and not stressed in the experimental setting. Dogs that passed the pretest progressed to two experimental sessions on two different days. Each session consisted of a training phase and one test trial (see Fig. 2). The interval between the two sessions was between 1 and 11 days (Mean ± SD = 5.21 ± 3.16 days) for all dogs except for one. This dog could only be tested in the second session after 30 days due to an accident. Nevertheless, this dog reached the criterion in the second training phase equally fast as the other dogs; therefore, we did not exclude it from our sample.

Testing schedule of Experiment 1
Pretest
In the pretest, the owner entered the experimental room together with the dog on the leash. Inside the room, the apparatus was already set up and filled with food rewards and the experimenter was not present during the pretest. The owner sat down and let the dog off the leash, so that it could explore the room and manipulate the apparatus for 10 min. Owners were allowed to encourage their dogs to approach the apparatus with one command in the beginning of the pretest (e.g., “Get it!”, “It’s yours!”) and to comfort their dogs when they seemed stressed by the experimental setting. The pretest was passed successfully when the dog obtained at least one piece of food reward on its own within 10 min.
Training phase
The training allowed the dogs to learn how to effectively manipulate the apparatus to obtain the food reward and to give them experience about their owners’ behavior in this task. To systematically manipulate the dogs’ experience, they were randomly assigned to one of two experimental groups: “Encouraging owner” (N = 13 dogs) or “Non-encouraging owner” (N = 12 dogs). In the “Encouraging owner” group, owners were asked to encourage their dogs verbally whenever the dogs looked back at them (e.g., “Good dog!”, “Keep trying!”). They were, however, not allowed to make any gestures or point at the apparatus, and they were wearing common sunglasses that prevented the dogs from having eye contact with the owners, while the owners could still see what their dogs were doing. In the “Non-encouraging owner” group, the owners were wearing dark sunglasses that were opaque, so that they could not see the actions of their dogs. These owners were asked to sit passively during the training phase.
Each training trial started with the dog being allowed to observe the experimenter entering the room and hiding six food pieces in the apparatus. In the first trial, the dogs could run free and watch the hiding of the food in the apparatus closely to increase their motivation. In every other trial, the dogs observed the hiding of the food from a position next to their owner, where they were gently restrained by the owner. After the experimenter hid the last piece of food, she touched but did not engage the blocking mechanism and then left the room inconspicuously. Once the experimenter left, the dog was released by the owner with one command that allowed it to manipulate the apparatus to obtain the food and that was known to the dog (e.g., “Get it!”, “It’s yours!”). During each training trial, the dog received either encouragement or no encouragement, depending on the assigned condition. A training trial ended after the dog had obtained all food pieces or after it gave up manipulating the apparatus for longer than 1 min. Training trials were repeated until the dog reached the criterion of obtaining all six food pieces hidden in the apparatus within 1 min. After reaching the criterion, two more training trials were carried out to familiarize the dog with a situation where not every container was baited. In these trials, the procedure was exactly the same as in the other training trials with the exception that the experimenter pretended to hide six pieces of food while she actually only hid three pieces of the reward.
Test trials
After each training phase, one test trial was conducted. Each dog was tested twice with two different test trials: “Apparatus empty” or “Apparatus blocked”. The sequence of test trials was counterbalanced across dogs.
In the test trials, owners of dogs of both groups were asked to wear opaque sunglasses and sit passively. In the test trial “Apparatus empty”, the experimenter pretended to hide food in the apparatus as before, but no food was actually placed into the containers. In the test trial “Apparatus blocked”, however, the experimenter hid six food pieces in the apparatus but then engaged the blocking mechanism, which would render the apparatus immobile after half a turn, so that the dog could only obtain three pieces of food. After the experimenter left the room, the dogs were allowed to manipulate the apparatus as in the training trials. A test trial ended after a dog gave up manipulating the apparatus for more than 1 min or after a maximum of 5 min. The second test trial took place on another day after a second session of identical training trials.
Data analysis
All experimental sessions were videotaped for later behavioral coding with Solomon Coder beta (©2006–2009 András Péter). All statistical analyses were carried out with SPSS Statistics 17.0.0 (©2008 SPSS Inc.).
The dogs’ learning rate was investigated by analyzing the number of trials needed to reach criterion in the first training phase. The effect of encouragement during training on the learning rate was tested using a Mann–Whitney U test (Encouraging owner, Non-encouraging owner). Additionally, a Spearman’s rank correlation was carried out to investigate whether the age of the dog influenced the learning rate.
For statistical reasons, we decided to include only continuous variables in our analysis. The following behavioral variables were recorded during test trials at 0.1 s time resolution:
-
Manipulating the apparatus (duration, latency): The dog interacts with the apparatus using its muzzle or paws.
-
Looking at the owner (duration, latency): The dog directs its head and eyes (if visible) to the owner.
-
Looking at the door (duration, latency): The dog directs its head and eyes (if visible) to the door.
Since the length of the test trials varied, raw data of the durations were converted into relative durations. A second coder blind to the aim of the experiment and to the experimental conditions coded 20% of the videos of the test trials, and Cronbach’s alpha was calculated as a measure of interobserver reliability. Cronbach’s alpha was greater than α = 0.84 for all behavioral variables.
Linear mixed models (LMM) were used to investigate the effect of experimental groups (Encouraging owner, Non-encouraging owner), types of test (Apparatus empty, Apparatus blocked), and sequence of test sessions (First session, Second session) on latency and relative duration of manipulating the apparatus and the gazing behavior of the dog during test trials. Analyses of the residuals of the LMMs confirmed normal distribution for all variables but “latency to look at the owner.” Therefore, this variable was log-transformed and a new LMM was calculated.
Results
No difference in the number of trials the dogs needed to reach criterion was found between dogs whose owners had encouraged them during training trials and dogs whose owners had remained silent (Mann–Whitney U test: N = 25, Z = −0.891, P = 0.373). Further, there was no correlation between age of the dog and learning rate (Spearman’s rank correlation: N = 25, ρ = 0.146, P = 0.487).
Since the dogs—independently from the owners’ encouragement—were similarly successful in their first training session, it is not surprising that their latency to approach the apparatus in the test trials was the same in both groups (LMMGroup_x_Test_x_Session: N = 25, df = 42, F Group = 1.019, P = 0.318). Similarly, in both types of test trials, they approached the apparatus equally fast (LMMGroup_x_Test_x_Session: N = 25, df = 42, F Test = 1.085, P = 0.304), suggesting that they were equally motivated in both tests. Despite this, dogs continued to manipulate the apparatus considerably longer when it was blocked than when it was empty (LMMGroup_x_Test_x_Session: N = 25, df = 42, F Test = 18.587, P ≤ 0.001).
The dogs that had been encouraged during the preceding training trials generally stopped manipulating the apparatus after a shorter time than the dogs that had not been encouraged (LMMGroup_x_Test_x_Session: N = 25, df = 42, F Group = 4.437, P = 0.041). Also, the amount of looking at their owners depended on the encouragement received during the training trials. Dogs that had been encouraged looked at their owners longer than dogs that had not been encouraged (LMMGroup_x_Test_x_Session: N = 25, df = 42, F Group = 4.328, P = 0.044). Additionally, there was an effect of the sequence of the test trials on the duration of looking at the owner, with dogs of both groups looking for shorter periods in the second session (LMMGroup_x_Test_x_Session: N = 25, df = 42, F Session = 6.144, P = 0.017). This difference was more pronounced in dogs with encouraging owners, where the duration of looking at the owner dropped almost to the levels of non-encouraged dogs in the second session, although this trend was not significant (LMMGroup_x_Test_x_Session: N = 25, df = 42, F Group*Session = 3.263, P = 0.078; Fig. 3a). The type of test trial had no effect on how much dogs looked at their owners but did influence when they first looked at them. Dogs looked at their owners later when the apparatus was blocked (LMMGroup_x_Test_x_Session: N = 25, df = 42, F Test = 9.136, P = 0.004), although this effect was only found in the first session (LMMGroup_x_Test_x_Session: N = 25, df = 42, F Test*Session = 8.667, P = 0.005; Fig. 3b). Importantly, independently from previous encouragement by the owner, dogs in both groups looked at the owner and did so with a similar latency (LMMGroup_x_Test_x_Session: N = 25, df = 42, F Group = 1.612, P = 0.211).

a Means of the relative duration of looking at the owner (with 95% confidence intervals (CI)), grouped by testing sequence. b Means of the latency to look at the owner (with 95% CI), grouped by testing sequence
In the test trials, the dogs were also found to look repeatedly at the door. They looked at the door significantly longer in test trials, in which the apparatus was empty than when it was blocked (LMMGroup_x_Test_x_Session: N = 25, df = 42, F Test = 14.164, P = 0.001) and they did so more in the second session (LMMGroup_x_Test_x_Session: N = 25, df = 42, F Session = 5.824, P = 0.020; Fig. 4a). Previous encouragement on the other hand had no effect on how long the dogs looked at the door (LMMGroup_x_Test_x_Session: N = 25, df = 42, F Group = 1.082, P = 0.304). However, the latency to look at the door was affected both by the type of test and by previous encouragement (LMMGroup_x_Test_x_Session: N = 25, df = 42, F Test = 36.575, P ≤ 0.001; F Group = 6.285, P = 0.016; Fig. 4b) with dogs looking at the door considerably earlier when the apparatus was empty and dogs that had previously been encouraged by their owners looking at the door sooner than non-encouraged dogs.

a Means of the relative duration of looking at the door (with 95% CI), grouped by type of test. b Means of the latency to look at the door (with 95% CI), grouped by type of test
Discussion
In this experiment, we found that previously encouraged dogs looked longer at their owners than non-encouraged dogs, but this difference almost disappeared in the second test trial. The latency to look at the owner was the same for all dogs. Furthermore, while the dogs manipulated the apparatus longer when it was blocked than when it was empty, the latency to start manipulating was the same in both test types. Finally, the dogs looked longer at the door through which they and the experimenter had entered the experimental room, when the apparatus was empty than when it was blocked.
While owner’s encouragement during the training phase had no influence on how fast the dogs acquired the task, the behavior of the owner had an effect on how long the dogs continued to look back at them when they were faced with a problem in the test trials. Remarkably, the rather brief exposure to the owner’s encouragement in our experiment (i.e., owners were only allowed to encourage their dogs during the initial training phase) was sufficient to cause a significant increase in owner-directed behavior in the test trials. Further emphasizing the flexibility of this behavior, we found that already in the second test trial, the rate of looking at the owner dropped down to almost the same level as in dogs that had never been encouraged, suggesting that the dogs learned in the first test trial that owners would not interfere when they were faced with a problem. However, we found that looking back at the owner occurred in the non-encouraged dogs as well and that the latency to look at the owner was the same for all dogs, independently from previous encouragement. This shows that at least the occurrence of looking at the owner is common in dogs, but its pattern can be flexibly adjusted to the situation.
Dogs from both groups, however, did not look at the owner longer or earlier in any of the two problem situations (i.e., blocked apparatus vs. empty apparatus). This cannot be explained by the dogs perceiving both test trials as similar problems because based on their manipulative behavior, it is clear that they differentiated between the two kinds of problems. When the apparatus was blocked, the dogs continued to manipulate the apparatus much longer than when the apparatus was empty. Also—since we controlled for odor cues—this result was not likely to be due to a lack of food odor, which could have led dogs to instantaneously perceive that the apparatus was empty. Confirming this, the latency to approach and manipulate the apparatus was the same in both test trials indicating that in the beginning of the trial, the dogs were equally motivated to manipulate the apparatus when it was empty as well as when it was filled. However, receiving no food reward in the empty condition—compared to the blocked condition in which dogs received three pieces of food before the apparatus got blocked—might have led dogs to give up sooner. Alternatively, continuing to manipulate the apparatus for a long time when it was blocked might have been caused by the novel experience of suddenly not being able to move the apparatus anymore and not realizing that the task was in fact unsolvable. Therefore, the dogs might have simply tried harder to solve the task.
Accordingly, it seems that the dogs did not take into account that one of the problems was more likely to be solved by the owner. This is not surprising since—although the dogs might have had experiences with their owners retrieving inaccessible items for them during their everyday interactions—in the experimental setting, the dogs could never experience the owner actually unblocking the blocked apparatus for them. They could, however, repeatedly experience the experimenter re-baiting the empty apparatus, and interestingly we found that—when the apparatus was empty—the dogs looked more at the door through which the experimenter had entered to bait the apparatus whenever it was empty. Based on this observation, one can hypothesize that the dogs might have indeed recognized the more active, refilling role of the experimenter, and when they were faced with the empty apparatus, they expected her to return in accordance with the usual sequence of the procedure. A confounding factor was, however, that the dogs also had entered the experimental room through the same door and as such, looking at the door may have merely reflected their expectation to leave the experimental room once the apparatus was empty. In Experiment 2, we therefore attempted to resolve the question of what dogs may learn about two experimenters’ specific abilities to solve one specific problem each.
Experiment 2
In the second experiment, we changed two design features of the applied paradigm. Firstly, the dogs and the experimenters entered the room through different doors. Secondly, we introduced two experimenters, the Filler and the Helper. The Filler regularly re-baited the empty apparatus, whereas the Helper repeatedly entered to unblock the apparatus when it got blocked. In two test trials analogous to Experiment 1, we then examined whether dogs initiated interactions with the Filler more often when they found the apparatus empty and with the Helper more often when the apparatus was blocked. Further, any behavior directed to the door where the dogs had entered would indicate that the dogs expected to leave the room.
Materials and methods
Subjects
For this experiment, 36 new dog–owner pairs were recruited using the same criteria as in Experiment 1. Thirteen dogs had to be excluded because they failed the pretest, two dogs had to be excluded during testing because the experiment had to be aborted (one tried to damage the apparatus, one started to get too stressed by the experimenters in the room). The data of one dog could not be analyzed because video recording failed during the experiment. Therefore, the data of 20 dogs were analyzed. The sample consisted of eight males and twelve females ranging from 1.0 to 15.8 years of age (Mean ± SD = 4.78 ± 3.72 years). Dogs were 14 purebred dogs from four different FCI breed groups (10 Sheepdogs, 1 Terrier, 2 Pointing dogs, 1 Companion dog) and 6 mixed-breed dogs. Three owners were men and 15 were women; two owners had two dogs participating in the experiment.
Apparatus
The same apparatus as in Experiment 1 was used in this experiment.
Experimental setup
The experiment was carried out between September 2008 and February 2009. The testing location and setup were the same as in Experiment 1, but in this experiment, three different doors were used. The owner used the door on one side of the experimental room to enter and exit together with the dog. During the whole experiment, owners were asked to wear dark sunglasses and sit passively while being oriented to the apparatus. On the other side of the room, there were two opposing doors (Door1 and Door2; see Fig. 5), through which the two experimenters entered and left the experimental room. The two experimenters each acted out one specific role (i.e., Filler and Helper). Prior to the experiment, one of the two doors (Door1, Door2) was assigned to and used by one experimenter throughout the familiarization, the training, and the learning phases. The opposing door was used by the other experimenter. The sides of the assigned doors were counterbalanced across dogs. Five women acted as experimenters in this study, and the roles were counterbalanced between experimenters, so that every experimenter played each of the two roles equally often.

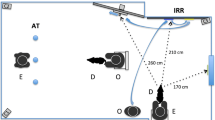
Schematic drawing of the experimental setup at the beginning of a test trial. The drawing shows the starting position of the dog next to the chair of the owner and the position of the apparatus. The door that the owner used together with the dog is behind the owner’s chair and not visible in this drawing. The two experimenters are positioned in front of the doors (Door 1, Door 2) that they use during the training and the learning trials. A grid on the floor marks sections of 1m² each
Procedures
Dogs had to pass the same pretest as in Experiment 1. Subsequently, the successful dogs were familiarized with the experimental room and the two experimenters. The familiarization phase was immediately followed by the training phase, which was similar to Experiment 1 with the exception that only the experimenters and not the owners interacted with the dogs in Experiment 2. After reaching the criterion, the dogs started the learning phase, which consisted of two sessions on two different days and during which they could learn about the specific abilities of the two experimenters. When the dogs had had the opportunity to observe the actions of the two experimenters in both learning sessions, they received two consecutive test trials (i.e., “Apparatus empty”, “Apparatus blocked”) that were analogous to Experiment 1 (see Fig. 6 for the testing schedule).

Testing schedule of Experiment 2
For seven of the dogs, the first learning session was carried out immediately after the training phase, and for 13 dogs, this session had to be conducted on a different day—depending on how fast they reached the criterion during the training phase. The interval between the days on which dogs could be tested was between 1 and 15 days (Mean ± SD = 5.21 ± 3.50 days).
Pretest and familiarization
The procedure of the pretest was the same as in Experiment 1. For the familiarization, the owner entered the experimental room with the dog on the leash and let the dog explore the room and the apparatus for approximately 1 min. Then, both experimenters opened their respective doors and greeted the dog shortly (e.g., petting, talking to the dog)—one after the other. The sequence of greeting was counterbalanced between dogs. Subsequently, the owner left the experimental room together with the dog.
Training phase
Each training trial started with the dog being allowed to observe the Filler hiding six pieces of food in the apparatus from a position next to the owner. After the Filler hid the last piece of food, she only touched but did not engage the blocking mechanism and then left the room. Thereafter, the dog was released by the owner and allowed to manipulate the apparatus with one command known to the dog. After 1 min, the Helper entered the experimental room, and for another minute, she encouraged the dog to manipulate the apparatus or showed it how to do so if the dog did not approach the apparatus by itself. After that, the Helper left the room and the owner called the dog back to their side. The training ended when the dog reached the criterion of obtaining all six food pieces within 1 min.
Learning phase
During the learning phase, the dogs had the opportunity to further learn about the specific abilities of the Filler (i.e., providing the food and baiting the apparatus) and the Helper (i.e., unblocking the apparatus when it is blocked).
In the first trial of each session, the dog was allowed to observe the Filler calling the dogs name and then hiding food pieces in the apparatus as in the training trials. After the hiding, the Filler either only touched or engaged the blocking mechanism. In those trials in which the Filler only touched the blocking mechanism, she pretended to hide six pieces of food while she actually only put three pieces into the apparatus. However, in a trial in which the blocking mechanism was engaged, she hid six pieces, of which only three pieces were accessible to the dog before the apparatus stopped rotating. Therefore, in both of these cases, the dog could retrieve three pieces of food during 1 min and after that the owner called it back. In the non-blocked situation, the same procedure was repeated such that the Filler entered the room and once again baited the apparatus. In the blocked situation, the next trial also followed after 1 min, but now the Helper entered the room. She called the dog’s name, disengaged the blocking mechanism so that the apparatus could be freely rotated again and positioned the upper disk so that the dog had immediate access to the reward in the next food container. Then, the Helper left the room and the dogs were again allowed to manipulate the apparatus for 1 min, which gave them the chance to retrieve the remaining three pieces of food. Due to this procedure, the dogs received an equal amount of food after observing each of the experimenters’ actions.
The sequence of ten trials in each session was semi-randomized with the preconditions that a trial where the dog observed the actions of the Helper could only occur after a trial with the Filler and that trials with the Filler could not take place more than twice in a row. Under these preconditions, dogs underwent six trials in which they could observe the actions of the Filler and four trials in which they saw the actions of the Helper.
Test phase
Directly after the second session of learning trials, two test trials were carried out consecutively, in an order counterbalanced across dogs. Differently from Experiment 1, we had to administer both test trials after the dogs had completed both learning session to ensure that they had an equal amount of experience with the experimenters before being tested in the two different situations.
In the two test trials, the dogs were randomly assigned to one of two groups to differentiate whether they had learned something about the identity of the experimenter or about the sides from which the Filler and the Helper had entered during learning trials. For half of the dogs, the experimenters stood in front of the same door, through which they had entered throughout the previous phases (Group “Same side”, N = 10), for the other dogs, the positions of the experimenters were swapped (Group “Changed side”, N = 10).
In both test trials, the owner entered the experimental room with the dog on leash. Inside the room, the apparatus was already set up for the trial. In the test trial “Apparatus empty”, there was no food hidden in the apparatus. In the test trial “Apparatus blocked”, there were six pieces of food hidden in the apparatus, but the blocking mechanism had been engaged so that the apparatus would stop rotating after half a turn. The two experimenters were standing inside the room in front of the two doors (Door1, Door2). Both experimenters had their backs turned to the dog to avoid potential unconscious cueing. Depending on the assigned group, the experimenters were either positioned in front of their own doors or in front of the opposing door. The owner sat down and released the dog as in the previous trials. A test trial ended after a dog gave up manipulating the apparatus for more than 1 min or after a maximum of 5 min. After the test trial, the owner and the dog left the experimental room, and after a short break, the second test trial followed.
Data analysis
Behavioral coding and statistical analyses were carried out as in Experiment 1. The dogs’ learning rate was also analyzed as in Experiment 1.
The following behavioral variables were coded during the test trials at 0.1 s time resolution:
-
Manipulating the apparatus (duration): The dog interacts with the apparatus using its muzzle or paws.
-
Looking at the owner (duration): The dog directs its head and eyes (if visible) to the owner.
-
Looking at the experimenters (duration): The dog directs its head and eyes (if visible) to one of the experimenters. Analyzed separately for each experimenter.
-
Staying close to the experimenters (duration): The dog stays in the area in which one of the experimenters is standing (1 m2, indicated by red tape on the floor). Analyzed separately for each experimenter.
-
Touching the experimenters (first occurrence): The dog approaches one experimenter and touches her with any part of its body.
-
Staying close to the exit (duration): The dog stays in the area behind the owner, right in front of the door through which they had entered (1 m2, indicated by red tape on the floor).
Since coding the behavior of looking at the door, through which the dogs had entered and exited the room, could not easily be achieved in Experiment 2 because the owners were seated in front of the door, the behavior of staying close to the exit (i.e., behind the owner) was coded instead. As also in this experiment, the duration of the test trials varied, raw data of the behavioral variables were converted into relative durations. As in Experiment 1, a second coder coded 20% of the videos of the test trials, and Cronbach’s alpha was greater than α = 0.83 for all behavioral variables. For the discrete variable “Touching the experimenters,” the agreement was 100%.
As in Experiment 1, linear mixed models (LMM) were used to examine the effect of experimental group (Same side, Changed side), type of test (Apparatus empty, Apparatus blocked), and test session (First session, Second session) on duration of manipulating the apparatus, the duration of looking at the owner and the duration of staying close to the exit. Separate LMMs were applied to examine the behavior of gazing at and staying in the proximity of the two experimenters in the room during test trials. Analyses of the residuals of the LMMs confirmed normal distribution for all variables but “staying close to the exit” and “staying close to the “Helper”. Therefore, these variables were square root transformed and new LMMs were calculated.
Finally, the first choice to touch one of the two experimenters was analyzed with binomial tests separately for the first and the second test trial.
Results
No correlation between age of the dog and learning rate was found (Spearman’s rank correlation: N = 20, ρ = −0.145, P = 0.543) in accordance with Experiment 1.
In the test trials, the dogs manipulated the apparatus considerably longer when it was blocked than when it was empty (LMMGroup_x_Test_x_Session: N = 20, df = 32, F Test = 28.255, P ≤ 0.001). Additionally—while in Experiment 1 we found no effect of the sequence—here dogs manipulated the apparatus longer in the second test trial (LMMGroup_x_Test_x_Session: N = 20, df = 32, F Session = 4.349, P = 0.045), especially in those test trials where the apparatus was blocked (LMMGroup_x_Test_x_Session: N = 20, df = 32, F Test*Session = 7.737, P = 0.009).
In this experiment, there was no effect of type of test, sequence, or position of the experimenters on the duration of looking at the owner. However, the dogs spent more time close to the exit behind the owner in the test trials when the apparatus was empty (LMMGroup_x_Test_x_Session: N = 20, df = 32, F Test = 6.007, P = 0.020; Fig. 7).

Means of the relative duration spent close to the exit (with 95% CI), grouped by type of test
In contrast to our expectations, no effect of the type of test on gazing at either the Filler (LMMGroup_x_Test_x_Session: N = 20, df = 32, F Test = 1.667, P = 0.206) or the Helper (LMMGroup_x_Test_x_Session: N = 20, df = 32, F Test = 0.526, P = 0.474) during the two test trials was found. We only found that dogs looked at the Filler less in the second trial than in the first trial (LMMGroup_x_Test_x_Session: N = 20, df = 32, F Session = 6.915, P = 0.013), suggesting a decrease in gazing behavior due to a carryover effect from the first to the second test trial. In regard to the behavior of gazing at the Helper, however, we found that when the experimenters stayed in the same position as during previous trials, the dogs looked at the Helper more in the second test trial. Only when the positions were swapped, the gazing pattern was the same as for the Filler with a decrease in the second trial (LMMGroup_x_Test_x_Session: N = 20, df = 32, F Group*Session = 5.470, P = 0.026). Primarily, these results indicate that the dogs did not look preferentially at those experimenters, who previously helped them in the respective problem situations. However, since both experimenters had their backs turned to the dogs, it might be that the dogs did not regard looking at the person as the most effective form of behavior to direct toward them.
Therefore, we also analyzed whom of the experimenters the dogs initially approached and touched and in which trials they spent more time in the proximity of either the Filler or the Helper. Since in this experiment, both test trials were administered consecutively and we expected a possible carryover effect from the first to the second test trial, we analyzed the two test trials separately (see Table 1). Ten dogs first received the test where the apparatus was blocked, in which they were expected to direct their behavior toward the Helper. Those dogs clearly preferred to initially approach and touch the Helper (Binomial test: Helper = 9, Filler = 1, P = 0.021, Holm–Bonferroni corrected: P ≤ 0.05). However, the other ten dogs, which were confronted with the empty apparatus first, showed no clear preference for the Filler (Binomial test: Helper = 7, Filler = 3, P = 0.344, Holm–Bonferroni corrected: P > 0.05). Moreover—when looking at the first test trials of all dogs together—they preferred to initially touch the Helper (Binomial test: Helper = 16, Filler = 4, P = 0.012, Holm–Bonferroni corrected: P ≤ 0.05). In the second test trial, six dogs touched the Helper and three dogs touched the Filler, but most of the dogs (N = 11) did not approach any of the experimenters closely anymore, irrespective of the type of test. This indicates that most dogs stopped approaching the experimenters closely after experiencing that they did not react to their approach in the first test trial.
Analysis of the duration that the dogs spent in the proximity of the Filler revealed that all dogs spent more time close to her when the apparatus was empty, but the group of dogs for which the experimenters had swapped sides spent generally less time close to the Filler (LMMGroup_x_Test_x_Session: N = 20, df = 32, F Test = 5.735, P = 0.023; F Group = 6.390, P = 0.017, Fig. 8). Staying in the proximity of the Helper, however, was independent of the type of test trial for the dogs. We only found that they spent less time with the Helper in the second test trial (LMMGroup_x_Test_x_Session: N = 20, df = 32, F Session = 4.139, P = 0.050; Fig. 8).

Means of the relative duration spent close to one of the experimenters (with 95% CI), grouped by the test condition. The upper panel shows the duration spent close to the Filler, the lower panel shows the duration spent close to the Helper
Discussion
In this experiment—similarly to Experiment 1—we found that the dogs manipulated the apparatus longer when it was blocked than when it was empty, while they spent more time close to the exit when the apparatus was empty. The dogs did not preferentially look at any of the two experimenters depending on the type of test, but they preferred to first approach and touch the Helper. Finally, we found that the dogs spent more time in the proximity of the Filler when the apparatus was empty.
As in Experiment 1, the manipulative behavior of the dogs confirmed that they differentiated between the two problems with the apparatus but again they did not preferentially look at their owners when the apparatus was blocked or when it was empty. This was less surprising in the present experiment because the dogs were provided with two actively helping experimenters, while their owner remained passive. Moreover, we found that the dogs spent more time close to the exit when the apparatus was empty than when it was blocked. However, they also spent more time in proximity of the Filler when the apparatus was empty. Accordingly, it is likely that both factors—expecting to leave and expecting the experimenter to enter—accounted for the increased amount of looking at the door when the apparatus was empty in Experiment 1.
Interestingly, although in this experiment—in contrast to Experiment 1, in which facing the blocked apparatus was a novel problem—the dogs repeatedly had the experience that they could not successfully manipulate the apparatus anymore once it was blocked, they nevertheless did not give up manipulating the apparatus in the test trial. If during the learning phase dogs did not understand the unblocking effect of the Helper’s action on the blocking mechanism but focused purely on her encouragement (i.e., calling the dog’s name and allowing the dog to continue with manipulating the apparatus), they might have learnt that the solution was to further manipulate the apparatus when finding it blocked. The more interactive behavior of the Helper—mainly occurring in the trials of the training phase—may also explain why the dogs preferred to approach and touch her first, independently of the problem they were facing.
The only result we found in support of the dogs’ understanding of the specific ability of at least one of the experimenters was that they spent more time in proximity of the Filler when the apparatus was empty. This preference for the Filler was less pronounced when the experimenters swapped sides so that she was no more in the same position as during previous trials. However, the dogs did not preferentially stay close to the Filler’s door when the Helper had taken her position, suggesting that dogs relied not simply on the position but also on the person. Being confused by the Filler and the Helper changing position might have been enhanced, given the fact that the experimenters had their backs turned to the dog, which likely made the recognition of the persons more difficult.
General discussion
In both experiments, we found that previous interactive behavior of a human partner influenced how intensively dogs initiated interactions with that person when facing a problem. Thus, the dogs differentiated between two unfamiliar persons they got to know in the given situation, but they also context-specifically tuned their gazing behavior toward their owner, with whom they had lifelong experiences. Our findings are in accordance with earlier results demonstrating that looking at humans in problem situations is either based on genetic predispositions and/or more easily learnt in dogs than in non-domesticated canids (Gácsi et al. 2009; Virányi et al. 2008), but that its form (Gaunet 2008) and amount (Bentosela et al. 2008) are readily adjusted to the context as well as the interaction style of the humans (Marshall-Pescini et al. 2009). While dogs’ sensitivity seems to exceed the unselective social referencing pattern of 7-month-old infants (Striano and Rochat 2000), determining whether such an adjustment to human behavior relies on conditioned responses, learning about the human’s behavioral cues or reaches into reasoning about others’ intentional and perceptual characteristics requires further research.
We found no evidence that the dogs would adjust their gazing behavior to the potential helping abilities of the owner in Experiment 1 or the active helping role of the Helper in Experiment 2. This is probably due to the fact that they did not recognize the Helper’s specific ability to unblock the device, even when they had the opportunity to repeatedly observe her manipulating the blocking mechanism and unblocking the apparatus with this action. Few experimental studies have so far investigated action understanding in dogs. One study demonstrated that dogs interpreted the action of conspecifics in relation to its effect on the environment (Range et al. 2007), but no such study exists about the causal understanding of human actions. Several studies have shown, however, that humans’ ostensive communication easily overshadows the causal evaluation of an action demonstrated by a human and leads dogs into erroneous performance (Kupán et al. 2011; Prato-Previde et al. 2008; Szetei et al. 2003; Topál et al. 2009). Also in our study, the human’s dog-directed communication seems to have a stronger effect on the behavior of the dogs than understanding the role of the humans in unblocking the apparatus. In case of refilling the apparatus, however, the dogs seem to demonstrate some understanding and adjust their behavior accordingly. After finding the apparatus empty, they look at the door more often when the Filler is outside (in Experiment 1) and spend more time close to her when she is inside the room (Experiment 2). One possible explanation for this discrepancy might be that—due to our need to randomize the trials in which dogs experienced the actions of the Filler and the Helper—the dogs saw the Filler more often than the Helper and therefore had more opportunity to learn about the specific ability of the Filler. Another possible explanation is that the behavior of putting food into the apparatus can be seen as a transparent action that dogs had become familiar with during their lives in the human environment. The unblocking of the apparatus by the Helper, who used a mechanism that was visually inaccessible for the dogs, however, can be regarded as an opaque action that the dogs did not understand. From a study that directly compared dogs to human children (Virányi et al. 2006), there is evidence that dogs fail to recognize the function of intermediate steps in a more complex sequence of actions that are only indirectly linked to getting access to a reward. Participants had to indicate the position of either a toy or a stick that was needed to retrieve the toy—depending on the knowledge state of the experimenter. While the children indicated the position of either the toy or the stick according to which of them was not known to the experimenter, the dogs preferentially indicated the position of the toy in all of the conditions. The authors concluded that the dogs might not have recognized that the stick was needed to retrieve the toy and therefore only indicated the position of the toy.
It is a question, of course, whether the behaviors directed specifically at the Filler when the apparatus was empty reflected the communicative intention of the dogs or simply their expectations that the Filler would enter or move to refill the apparatus soon. The procedure of both experiments made it predictable for the dogs that after the apparatus was emptied, the Filler would enter and refill it. Learning this sequence can be the basis for adjusting the Filler-directed behaviors of the dogs to the test conditions, without requiring a real understanding of the Filler’s role in refilling the apparatus (Povinelli et al. 1992). Looking at the door through which the experimenter was expected to enter in Experiment 1 seems to confirm that the behavior reflects expectations rather than being a form of communication. However, in Experiment 2, where both experimenters had their backs turned toward the dogs, we found that they adjusted their preference of whom to approach and touch, but not their gazing behavior to the previous actions of the experimenters. This may indicate that they tried to communicate with the experimenters and did not consider gazing to be the right way of initiating communication. Previous studies have already shown that dogs are sensitive to the attentional state of a person (Call et al. 2003; Schwab and Huber 2006) and that they choose to beg from a seeing person rather than from a blindfolded person or a person that had their body turned away from the dog (e.g., Gácsi et al. 2004). Again, whether this reflects taking other behavioral cues or attentional mental states into account cannot be decided based on these data.
In a problem situation, Miklósi et al. (2000) carefully analyzed the temporal pattern of object- and owner-directed looks of dogs and their other attention-calling behaviors. They argued that human-directed looks function as attention-getting communicative signals. Based on our results, we do not claim that the human-directed looks of the dogs reflect communicative intentions. It is also unlikely, however, that looking at a human partner in this problem situation occurs only because dogs divide their attention between two interesting things (i.e., the apparatus and the owner) or because they want to check the owner’s reactions to the ongoing events. It is possible, though, that their gazing behavior is to a great extent driven by their expectations about the next actions of their human partners (Topál et al. 2005). These predictions can be formed based on what the dogs learnt during the course of the experiments as well as during their lifelong experiences, but this knowledge certainly contains specific information about the individual humans in relation to the given context and allows dogs to flexibly adjust their behavior.
References
Batki A, Baron-Cohen S, Wheelwright S, Connelan J, Ahluwalia J (2000) Is there an innate gaze module? Evidence from human neonates. Infant Behav Dev 23:223–229
Bentosela M, Barrera G, Jakovcevic A, Elgier AM, Mustaca AE (2008) Effect of reinforcement, reinforcer omission and extinction on a communicative response in domestic dogs (Canis familiaris). Behav Process 78:464–469
Call J (2001) Chimpanzee social cognition. Trends Cogn Sci 5:388–393
Call J, Bräuer J, Kaminski J, Tomasello M (2003) Domestic dogs (Canis familiaris) are sensitive to the attentional state of humans. J Comp Psychol 117:257–262
Carpenter M, Nagell K, Tomasello M, Butterworth G, Moore C (1998) Social cognition, joint attention, and communicative competence from 9 to 15 months of age. Monogr Soc Res Child 63:1–174
Corkum V, Moore C (1998) The origins of joint visual attention in infants. Dev Psychol 34:28–38
Csibra G, Gergely G (2006) Social learning and social cognition: the case for pedagogy. In: Munakata Y, Johnson MH (eds) Processes of change in brain and cognitive development. Attention and performance, vol XXI. Oxford University Press, Oxford, pp 249–274
Farroni T, Csibra G, Simion F, Johnson MH (2002) Eye contact detection in humans from birth. Proc Natl Acad Sci USA 99:9602–9605
Gácsi M, Miklósi Á, Varga O, Topál J, Csányi V (2004) Are readers of our face readers of our minds? Dogs (Canis familiaris) show situation-dependent recognition of human’s attention. Anim Cogn 7:144–153
Gácsi M, Győri B, Virányi Z, Kubinyi E, Range F, Belényi B, Miklósi Á (2009) Explaining dog wolf differences in utilizing human pointing gestures: selection for synergistic shifts in the development of some social skills. Plos One 4:e6584
Gaunet F (2008) How do guide dogs of blind owners and pet dogs of sighted owners (Canis familiaris) ask their owners for food? Anim Cogn 11:475–483
Gaunet F (2010) How do guide dogs and pet dogs (Canis familiaris) ask their owners for their toy and for playing? Anim Cogn 13:311–323
Hare B, Call J, Tomasello M (1998) Communication of food location between human and dog. Evol Commun 2:137–159
Johnson MH, Morton J (1991) Biology and cognitive development: the case of face recognition. Blackwell, London
Kupán K, Miklósi Á, Gergely G, Topál J (2011) Why do dogs (Canis familiaris) select the empty container in an observational learning task? Anim Cogn 14:259–268
Marshall-Pescini S, Valsecchi P, Petak I, Accorsi PA, Prato-Previde E (2008) Does training make you smarter? The effects of training on dogs’ performance (Canis familiaris) in a problem solving task. Behav Process 78:449–454
Marshall-Pescini S, Passalacqua C, Barnard S, Valsecchi P, Prato-Previde E (2009) Agility and search and rescue training differently affects pet dogs’ behaviour in socio-cognitive tasks. Behav Process 81:416–422
Miklósi Á, Polgárdi R, Topál J, Csányi V (2000) Intentional behaviour in dog-human communication: an experimental analysis of “showing” behaviour in the dog. Anim Cogn 3:159–166
Miklósi Á, Kubinyi E, Topál J, Gácsi M, Virányi Z, Csányi V (2003) A simple reason for a big difference: wolves do not look back at humans, but dogs do. Curr Biol 13:763–766
Perner J (1993) Understanding the representational mind. MIT Press, Cambridge
Povinelli DJ, Nelson KE, Boysen ST (1992) Comprehension of role reversal by chimpanzees: evidence of empathy? Anim Behav 43:633–640
Prato-Previde E, Marshall-Pescini S, Valsecchi P (2008) Is your choice my choice? The owners’ effect on pet dogs’ (Canis lupus familiaris) performance in a food choice task. Anim Cogn 11:167–174
Range F, Virányi Z, Huber L (2007) Selective imitation in domestic dogs. Curr Biol 17:868–872
Rochat P, Striano T (1999) Social-cognitive development in the first year. In: Rochat P (ed) Early social cognition: understanding others in the first months of life. Lawrence Erlbaum Associates, Mahwah, pp 3–35
Schwab C, Huber L (2006) Obey or not obey? Dogs (Canis familiaris) behave differently in response to attentional states of their owners. J Comp Psychol 120:169–175
Striano T, Rochat P (2000) Emergence of selective social referencing in infancy. Infancy 1:253–264
Szetei V, Miklósi Á, Topál J, Csányi V (2003) When dogs seem to lose their nose: an investigation on the use of visual and olfactory cues in communicative context between dog and owner. Appl Anim Behav Sci 83:141–152
Tomasello M (1995) Joint attention as social cognition. In: Moore C, Dunham PJ (eds) Joint attention: its origins and role in development. Lawrence Erlbaum Associates, Hillsdale, pp 103–131
Topál J, Miklósi Á, Csányi V (1997) Dog-human relationship affects problem-solving behavior in the dog. Anthrozoös 10:214–224
Topál J, Kubinyi E, Gácsi M, Miklósi Á (2005) Obeying social rules: a comparative study on dogs and humans. J Cult Evol Psychol 3:223–243
Topál J, Gergely G, Erdőhegyi Á, Csibra G, Miklósi Á (2009) Differential sensitivity to human communication in dogs, wolves, and human infants. Science 325:1269–1272
Virányi Z, Topál J, Miklósi Á, Csányi V (2006) A nonverbal test of knowledge attribution: a comparative study on dogs and children. Anim Cogn 9:13–26
Virányi Z, Gácsi M, Kubinyi E, Topál J, Belényi B, Ujfalussy D, Miklósi Á (2008) Comprehension of human pointing gestures in young human-reared wolves (Canis lupus) and dogs (Canis familiaris). Anim Cogn 11:373–387
Wellman H (1993) Early understanding of mind: the normal case. In: Baron-Cohen S, Tager-Flusberg H, Cohen D (eds) Understanding other minds. Oxford University Press, Oxford, pp 10–39
Acknowledgments
This research was supported by a DOC-fFORTE grant from the Austrian Academy of Sciences to L. Horn and by a project grant from the Stiftung Aktion Österreich-Ungarn to L. Huber, Á. Miklósi, F. Range and Z. Virányi. During this research, Á. Miklósi received support from FP7-ICT-2007 (LIREC-215554) and F. Range from FWF (P21244). We want to thank A. Dóka for his invaluable help in constructing the apparatus, A. Gergely, A. Kis, B. Korcsok, and D. Szabó for acting as the second experimenter in the Experiment 2, and C. Müller for his statistical support. Additionally, we would like to thank the students of the Department of Ethology for their support in recruiting and communicating with the Hungarian participants. We further thank all the owners and dogs for volunteering to participate in our experiments. Furthermore, we thank C. Müller and three anonymous referees for their comments on a previous version of this manuscript. Finally, we want to thank a private sponsor and Royal Canin for financial support of the Clever Dog Lab. The reported experiments comply with all laws of the country in which they were performed.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Horn, L., Virányi, Z., Miklósi, Á. et al. Domestic dogs (Canis familiaris) flexibly adjust their human-directed behavior to the actions of their human partners in a problem situation. Anim Cogn 15, 57–71 (2012). https://doi.org/10.1007/s10071-011-0432-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10071-011-0432-3