
Abstract
Remotely-sensed elevation data are potentially useful for constructing regional scale groundwater models, particularly in regions where ground-based data are poor or sparse. Surface-water elevations measured by the Shuttle Radar Topography Mission (SRTM) were used to develop a regional-groundwater flow model by assuming that frozen surface waters reflect local hydraulic head (or groundwater potential). Drainage lakes (fed primarily by surface water) are designated as boundary conditions and seepage lakes and isolated wetlands (fed primarily by groundwater) are used as observation points to calibrate a numerical flow model of the 900 km2 study area in the Northern Highland Lakes Region of Wisconsin, USA. Elevation data were utilized in a geographic information system (GIS) based groundwater-modeling package that employs the analytic element method (AEM). Calibration statistics indicate that lakes and wetlands had similar influence on the parameter estimation, suggesting that wetlands might be used as observations where open water elevations are unreliable or not available. Open water elevations are often difficult to resolve in radar interferometry because unfrozen water does not return off-nadir radar signals.
Résumé
Les données obtenues par télédétection peuvent être utiles pour l’élaboration de modèles hydrogéologiques à l’échelle régionale et particulièrement dans les régions où les données d’élévations du sol sont rares ou éparses. Les élévations des niveaux d’eaux de surface mesurées par la navette de la mission de topographie radar (SRTM) ont été utilisées pour élaborer un modèle hydrogéologique d’écoulement à l’échelle régionale, en faisant l’hypothèse que les eaux de surface gelées correspondent au niveau piézomètrique local (ou niveau des eaux souterraines). Les lacs de drainage (principalement alimentés par les eaux de surface) sont choisis comme conditions aux limites et les lacs d’infiltration et marais isolés (principalement alimentés par les eaux souterraines) sont utilisés comme zones d’observation pour calibrer un modèle numérique d’écoulement d’une zone d’étude de 900 km2, localisée dans la région des lacs du Northern Highland au Wisconsin, Etats-Unis. Les données d’élévations ont été utilisées avec une suite logicielle de modélisation hydrogéologique basée sur l’approche système d’information géographique (SIG) et utilisant la méthode des éléments analytiques (AEM en anglais). Les statistiques de la calibration montrent que les lacs et les marais présentaient une influence similaire sur l’estimation des paramètres, ce qui suggère que les marais pourraient être utilisés comme zones d’observation là où l’élévation des eaux de surface est non fiable ou non disponible. Les élévations des eaux de surface sont souvent difficiles à obtenir avec l’interférométrie radar car les eaux non gelées ne renvoient pas les signaux radar latéraux (off-nadir).
Resumen
Los datos de elevación provenientes de sensores remotos tienen un uso potencial para la construcción de modelos de agua subterránea de escala regional, particularmente en regiones donde los datos basados en el terreno son pobres o escasos. Se usaron elevaciones de la superficie del agua medidas por la Misión de Topografía Radar de Trayectos Cortos (SRTM) para desarrollar un modelo regional de flujo de agua subterránea mediante el supuesto de que las aguas superficiales congeladas reflejan la presión hidráulica local (o potencial de agua subterránea). Los lagos de drenaje (alimentados principalmente por agua superficial) se han designado como condiciones limitantes y los lagos de escurrimiento y humedales aislados (alimentados principalmente por agua subterránea) se han usado como puntos de observación para calibrar un modelo de flujo numérico de los 900 km2 del área de estudio en la Región de Tierras Altas al Norte de los Lagos de Wisconsin, Estados Unidos. Los datos de elevación se utilizaron en un Sistema de Información Geográfico (SIG) basado en un paquete de modelizado de aguas subterráneas que usa el método de elemento analítico (AEM). La calibración estadística indica que los lagos y humedales tuvieron influencia similar en la estimación de parámetros lo que sugiere que los humedales pueden usarse como observaciones donde las elevaciones de agua expuesta no son confiables o no están disponibles. Las elevaciones de agua expuesta son difíciles de resolver mediante interferometría de radar debido a que el agua no congelada no retorna las señales de radar nadir.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
Estimation of the contribution of groundwater to the global water cycle is limited by a lack of hydrogeological data, tools to manage those data, and models for predicting subsurface flow at supra-regional scales. Overcoming these challenges will almost certainly require utilization of remotely sensed data combined with ground-based hydrologic information. Geographic information systems (GIS) have become the standard for regional and supra-regional scale surface hydrologic analysis. In the future, this role will likely translate to the analysis of subsurface hydrologic systems. In this article, an example is presented of integration of these components: remotely sensed data, GIS, and numerical groundwater flow modeling.
The current state-of-practice for the development of regional and supra-regional groundwater flow models involves the calibration of hydrologic parameters (principally hydraulic conductivity and recharge) to head measurements. In developed parts of the world, head measurements are usually derived from groundwater elevations in wells. Where well data are not available, however, the only indication of groundwater head is surface outcropping, i.e., surface water. Where groundwater and surface water are assumed to be well connected, surface-water elevation (stage) reflects groundwater head. Thus, if surface-water stage can be measured with accuracy, it may be possible to make groundwater flow predictions in shallow aquifers.
In regions of the world where ground-corrected digital elevation models are unavailable, the Shuttle Radar Topography Mission (SRTM) digital elevation models may provide the best available water elevation measurement (Smith 2002). SRTM elevations are derived through transmission and reception of radar signals off topographic features and processing the interference between two or more overpasses. Where the radar signal is weak, as from specular reflection off smooth open water, the resulting digital elevation model (DEM) contains “holes” that must be corrected to shoreline signals or ancillary data. Thus, open water often makes for questionable head measurements when the water surface is not iced over. Wetlands have been shown to produce good radar elevation signals, however, because the vegetation provides sufficient backscatter to the radar receiver. Assuming that the measured vegetation canopy is near the water level, therefore, wetlands provide a potential source of radar-derived water elevation data.
This article documents the application of SRTM-derived surface-water elevations, to the calibration of a regional-scale groundwater model. The observations tested in this study are SRTM-measured (C-Band Version 1 Seamless) elevations of frozen open-water bodies (lakes) and wetlands. The study was conducted in a region where multiple elevation datasets are available, for the purpose of testing the feasibility of satellite-based numerical groundwater modeling in less-developed parts of the globe. The study area is the Northern Highland Lakes Region of Wisconsin, USA, in which there exist thousands of lakes and wetlands. The majority of these surface-water features are thought to be well-connected hydraulically to groundwater. It is expected that forested wetlands will produce SRTM elevations that are very different from those of the underlying water table, while sedgelands and peatlands will produce elevations that are within a meter or two of the underlying water table. Thus, an important component of this study is to separate forested from non-forested wetlands prior to the model calibration process and this was done using the SRTM radar backscatter signal.
Study area
This study was conducted in Vilas County, Wisconsin, USA, in the Northern Highland Lakes Region (NHLR). It centers on a region surrounding one of the largest lakes in the county, Trout Lake. This area is home to a Long-Term Ecological Research Program, funded by the National Science Foundation. It encompasses a relatively well-understood natural system, with significant research in the areas of limnology, biology, hydrology, and hydrogeology (NTL-LTER 2004). Much of the groundwater system has been previously modeled (using analytic element methods (AEMs)) and documented (Dripps et al. 2006; Graczyk et al. 2003; Michaels 1995; Pint 2002).
The NHLR dominates north-central Wisconsin, stretching northward into the upper peninsula of Michigan. The region is characterized by hummocky terrain; a mix of low-lying hills and flatland marshes littered with lakes and streams of varying sizes. The surficial geology consists of Pleistocene glacial drift overlying basement rocks of the Canadian Shield. The Precambrian basement rock acts as the lowest confining unit, ranging from 0 to about 80 m below the land surface (Patterson 1989). In general, drainage features, including large lakes, flowages, and streams, are in direct contact with the groundwater system. Many of the disconnected or seepage lakes are fed either by local surface drainage or the groundwater system, and act as flow-through basins indicating local hydraulic head. While locally, some lakes are perched or mostly disconnected from the influence of groundwater, most lakes represent regional groundwater levels (Krabbenhoft et al. 1990). The conceptual hydrogeologic model, therefore, is a laterally extensive, unconfined aquifer system of high permeability, controlled by surface-water drainage.
This study focuses on a region surrounding Trout Lake, in the southwestern quadrant of Vilas County, to the north and east of the town of Minocqua (Fig. 1). The region covers an area of approximately 900 km2 and includes 177 lakes of varying position (Kratz et al. 1997), 305 isolated or connected wetlands, and several streams connecting various drainage features. The average elevation of the topography in the Trout Lake region is approximately 500 m above mean sea level (a msl), with a total relief of about 50 m.

US map highlighting the state of Wisconsin (light green) and Vilas County (dark green). The model area is indicated as being contained almost entirely within Vilas County, north and east of the town of Minocqua, WI
SRTM data
The Shuttle Radar Topographic Mission (SRTM) was a collaborative effort between the US National Aeronautics and Space Administration (NASA), the National Geospatial-Intelligence Agency (NGA), the German Aerospace Center (DLR), and the Italian Space Agency (ASI) to produce a near-global map of topography. The SRTM collected interferometric radar data that were used to generate global, high-quality DEMs at resolutions of 1 and 3 arc seconds, for latitudes less than 60° (Rabus et al. 2003; Rodriguez et al. 2004). Regions between latitudes 60°N and 57°S were continuously mapped with two bands (C- and X-bands) between 11 February and 22 February 2000 over a period of 11 days. Both bands were operating simultaneously illuminating and recording radar signals.
The SRTM mission aboard the Space Shuttle Endeavour used the same radar instrument that comprised the Spaceborne Imaging Radar-C/X-Band Synthetic Aperture Radar (SIR-C/X-SAR) that flew twice on the Endeavour in 1994 (Jordan et al. 1995). The master transmitter and receiver antennas for both interferometers utilized the original components in the shuttle cargo bay and the secondary (receive only) antennas were mounted on the tip of a 60-m-long lightweight mast (Rabus et al. 2003). To achieve the goal of global gapless mapping with a swath width of 225 km over limited mission duration, the interferometer was operated in ScanSAR mode. This translated to four subswaths being imaged quasi-simultaneously by periodic steering of the beam from small look angles (17°) to large angles (65°). Thus at any instance, two swaths (1 and 3 vs. 2 and 4) were imaged at the same time at different polarizations—horizontal transmit/horizontal receive (HH) and vertical transmit/vertical receive (VV). Rodriguez et al. (2004) estimated absolute and relative vertical errors of 9 and 7 m, respectively, in North America.
For this project, the SRTM-V1 (version 1) digital elevation data were used. SRTM data were processed using the SRTM Ground Data Processing System (GDPS) supercomputer system at the Jet Propulsion Laboratory of the California Institute of Technology in Pasadena, California. Data were mosaiced into approximately 14,000 1°×1° cells and formatted according to the Digital Terrain Elevation Data (DTED) specification for delivery to the US National Imagery and Mapping Agency (NIMA). NIMA later applied several post-processing steps to these data including editing, spike and well removal, water body leveling and coastline definition. These processed data are now available to the public as SRTM-V2. SRTM-V1 data were used for this project because US water elevations in SRTM-V2 are largely based upon US Geological Survey (USGS) seamless National Elevation Dataset elevations. Thus, they do not reflect the error in water elevations that might be encountered globally. The pixel size of the SRTM-V1 DEM is 1 arc second, or approximately 23 m in the NHLR.
To carry out wetland classification using radar backscatter, prerelease SRTM C-band image data were obtained from the Jet Propulsion Laboratory (T. Farr, Shuttle Radar Topography Mission, Jet Propulsion Laboratory, unpublished data, 2005). These data consist of 1 arc-second pixel radar brightness for all four sub-swaths (Sub-swath 1 and 4 are HH, Sub-swath 2 and 3 are VV). Preliminary investigation showed that the HH sub-swaths were most sensitive to identifying water below the vegetation canopy, and are therefore the best choice for determining surface-water exposure. Sub-swath 1 was used for this project because it provided full coverage of the model area.
AEM modeling
With the analytic element method (AEM), hydrologic features of a vertically averaged two-dimensional horizontal flow system (Dupuit-Forchheimer flow) are the superposition of mathematical functions or elements (Haitjema 1995). AEMs have been effective in the past for development of “screening models,” establishing an overall understanding of a regional system while leaving the more complex, local hydrogeology for rigorous site-specific modeling (Hunt 2006; Hunt et al. 1998). The AEM is well suited to regional studies because it is independent of a computational grid. The hydrogeological features themselves define the model system, removing the need to oversimplify areas of the model in the interest of computational efficiency (Haitjema 1995). This method lends itself particularly well to integration with spatial databases because the elements can be configured directly from the vector data used by many GIS. The AEM, used in concert with GIS, can be considered an object-oriented approach to groundwater flow modeling (Fredrick et al. 2004).
ArcAEM was created at the University at Buffalo, Buffalo, New York, to provide a suite of tools installed directly into the user interface of ArcGIS (ESRI 2001) that assist in generating elements for use by the AEM solver Split (Bandilla et al. 2005). While GIS map features (“shapefiles”) represent a near one-to-one correspondence to analytic elements (Rabideau et al. 2006), they also have far too much detail for efficient computation in analytic element (AE) models. ArcAEM uses the ESRI ArcObjects library to restructure the original GIS features into simplified or surrogate elements, which greatly improve the computation times in Split without significantly changing the solution result. For instance, reducing the number of segments of a river feature in the GIS to a small number of key vertices reduces computation time to as little as 5.5% of that without simplification (Rabideau et al. 2006). Other tools in ArcAEM permit the assignment of parameters to multiple elements, offer forms for entering parameters for specific element types, select features through spatial queries to convert to elements, and maintain flow connectivity between linear and polygon elements. Once the analytic groundwater solution is calculated by the solver, the output can be integrated into the GIS for display and analysis of results (Fredrick et al. 2004) using the off-the-shelf functions of ArcGIS (ESRI 2001).
Split is unique in its use of hydrologic features as “high-order” line elements that allow for local adjustment of numerical precision along a feature (Bandilla et al. 2005; Jankovic and Barnes 1999). Along with Split, the parameter estimation software, Ostrich (Matott 2005), was used as the calibration tool for this research. Ostrich is also fully integrated through the ArcAEM extension (Bandilla et al. 2005; ESRI 2001; Matott 2005; Silavisesrith and Matott 2005). Previous research has shown that the use of higher-precision elements may be more important for accurate model calibration than accurate flow solutions (Rabideau et al. 2006).
Methods
Hydrologic classification
Lakes were configured from the National Hydrography Dataset from the US Geological Survey converted directly to shapefiles within the GIS environment. This dataset was divided into two categories: drainage lakes and seepage lakes. Drainage lakes are connected to stream networks that extend across large portions of the study region. Kratz et al. (1997) describes seepage lakes as those lakes without a perennial surface inflow or outflow, while drainage lakes do have a perennial connection to surface drainage. Seepage lakes are disconnected from the surface drainage system for at least part of the year, although they may be connected by ephemeral streams or perennial wetlands (Kratz et al. 1997). Because seepage lakes are fed only by precipitation and groundwater, they are expected to be surface expressions of the regional water table. In the NHLR, seepage lakes are typically glacial kettle lakes that are of limited area and relatively deep. Seepage lake stage, therefore, is expected to be representative of local groundwater potential (hydraulic head) in the Wisconsin study area. Although it is recognized that examples of perched lake systems exist within the NHLR, the overall high permeability of the glacial outwash sediments suggests that drainage lakes can be treated as groundwater boundary conditions and seepage lakes as groundwater head observations in the model. At the regional scale, therefore, the many kettle lakes throughout the study area appear as piezometers.
Published wetland classifications (e.g., the US National Land Cover Dataset) rarely distinguish between wetlands with and without a significant canopy. Rather, wetlands are classified according to vegetation type, as distinguished by multispectral (visible and near infrared) sensors such as LandSat. Although these vegetation types are often well correlated to relative forest canopy heights, land cover classifications are not directly useful for distinguishing between satellite-based elevations of the forest canopy or wetland floor. At the Wisconsin study site, forested wetlands are typically dominated by woody vegetation with a significant percentage of their area covered by canopy. Non-forested, open wetlands are characterized by low grasses, shrubs, and peat, generally shorter than 1–2 m, with sparse tree canopy. In some cases, open wetlands may be dominated by peat and can be quite expansive.
Previous studies (Abdelfattah and Nicolas 2002; Dobson et al. 1992; Durden et al. 1989; Elachi 1980; Evans 1999; Harrell et al. 1995; Hess et al. 1990, 1995; Kasischke et al. 1997; Pope et al. 1994, 1997; Wang et al. 1998) have shown the sensitivity of electromagnetic radiation to forest structure. This knowledge has been used for a variety of applications including wetland mapping (Bourgeau-Chavez et al. 2001; Hess et al. 1995; Pope et al. 1994; Townsend 2002), estimating forest structure (Harrell et al. 1995; Moghaddam et al. 1994; Pope et al. 1994), and developing DEMs of forested regions (Chipman 2001). The wetlands in this study were broadly classified into two groups: open and forested wetlands.
Radar backscatter at higher frequencies (C- and X-bands) is dominated by scattering processes in the canopy/crown layer such as branches and foliage. Backscatter at lower frequencies (P- and L-bands) is dominated by scattering processes involving major woody biomass components such as trunks and branches (McDonald et al. 1991; Ulaby et al. 1990). As the SRTM C-band data is used in this study, it is expected that radar-derived elevations reflect canopy heights where the canopy exists. Ground-observations and near-infrared to visible satellite imagery (ASTER) were used to perform a supervised classification of the raw SRTM C-Band data for a subset of the study region. This classification indicated that the HH (emission and detection in the horizontal polarization) of the C-band data were lower in the open than the forested wetlands. This difference is assumed to occur because there is weaker backscatter of the horizontal polarization in the absence of vertical relief from tree canopy. The supervised classification was used to develop a threshold of the HH returns by which wetlands in the rest of the study region could be classified into open and forested.
Groundwater model design
The AEM groundwater model, or AE model, is steady state and two-dimensional. The overburden is treated as a single, uniformly thick, unconfined aquifer because of the scale of the model. Using the Dupuit-Forcheimer assumption that lateral groundwater flow is much greater than vertical flow in large systems (Haitjema 1995), it was expected that this groundwater system would be adequately represented using a single layer. A subset of this region has previously been modeled using a multi-layer groundwater system, in which an AE model was used to develop the boundary conditions for a finite-difference model (Hunt et al. 1998). Other AE models of the area include those of Dripps et al. (2006) and Graczyk et al. (2003). Based upon comparison of these multi-layer and single-layer models, the AE model adequately represented groundwater potential (hydraulic head) except in the immediate vicinity of lakes. The base of the aquifer was set at 425 m, the lowest elevation of bedrock within the model vicinity.
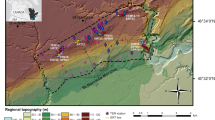
The model domain, centered on Trout Lake, was delineated based on the location of significant drainage features (Fig. 2). The Manitowish River drainage forms the northern and northwestern boundary of the model area. The western and southern boundaries are formed from several closely situated drainage lakes. The eastern boundary is defined by the most significant surface-water divide in the area, an upland with several large seepage lakes. Drainage lakes are used as outer boundaries, defining the outer extent of the groundwater model. It should be noted that smaller streams were omitted from the model. While many of these smaller, head-water streams may represent groundwater surface expression and would make good head observation points, they cannot be resolved using SRTM elevation data. Hydrographic data were obtained from the National Hydrography Dataset (NHD) and converted to compatible shapefiles within the GIS structure. These shapefiles were then converted into model elements with the ArcAEM extension (Silavisesrith and Matott 2005).

Model area, including boundary elements (constant head lakes and streams), observation data features, and zones of varying hydraulic conductivity (background conductivity is shown in white)
Groundwater recharge is represented using an area flux (recharge) element (not shown in Fig. 2). A single value of 0.0007 m/day (25.5 cm/year) was assigned to the recharge element for the purposes of this demonstration (Pint et al. 2003). It is important to have an independent estimate of groundwater recharge for large-scale groundwater flow models because hydraulic conductivity and recharge are typically found to be correlated during model calibration (Poeter and Hill 1997). Previous ground-based studies were relied on here, but groundwater recharge estimates may also be extracted from remotely sensed data. Global-scale land surface models (LSMs) have been used to predict “subsurface runoff” by assimilating satellite observations of water and energy fluxes into physically based models (Lohmann et al. 2004). Although these models come with their own errors, and extraction of groundwater recharge from subsurface runoff is currently not straightforward, it is clear that soil moisture budgets predicted from LSMs are potentially of great value for regional-scale groundwater modeling (Becker 2006; Hoffmann 2005).
In addition to the head-specified elements and the recharge element, polygonal zones representative of regions of varying hydraulic conductivity were delineated (Fig. 2). In the parlance of analytic elements, these zones are called “heterogeneities.” Within the study area, hydraulic conductivity is expected to vary within about 50% of the mean (Pint 2002). The conductivity zones, therefore, are used primarily to compensate for changes in aquifer thickness (Wuolo et al. 1995). A total of five zones (in addition to background conductivity) are included in the modeling strategy to reflect the changes in thickness over the model region. In the AEM solver Split, specification of a horizontal base is required (Bandilla et al. 2005). For this reason the model is a single-layer, two-dimensional representation of the groundwater system. In actuality, the bedrock elevation in the model domain varies from approximately 425 to 510 m asl, while the surface topography varies only between 475 to 525 m asl. Because the water table is near the surface throughout the study area (Patterson 1989), the saturated thickness was assumed to be approximately ±5% of the thickness of the overburden Pleistocene drift.
In the AE model, groundwater flow computations are solved in terms of transmissivity (the product of hydraulic conductivity and saturated thickness). Because one expects saturated thickness to vary over the same relative range as hydraulic conductivity but in a more spatially systematic manner, transmissivity zones in the model were defined on the basis of saturated thickness rather than sediment facies. Transmissivity zones (heterogeneity elements) were created using the GIS interface ArcAEM. An overburden isopach surface was created by interpolating overburden thickness point measurements reported by Attig (1985). Interpolation was carried out in ArcGIS Geostatistical Analyst (ESRI 2001) using ordinary Kriging. The map surface was then separated into five thickness classes and manually converted into polygons that were each assigned an attribute of average saturated thickness. These polygons (zones) were used as a basis for the transmissivity (heterogeneity) elements in the model. Zone 1, located at the northern edge of the model area has the smallest thickness due to a bedrock outcropping nearby, while the thickest region, zone 5 is located at the southern edge of the model. There is a gradational thickening from north to south reflected in zones 2 through 4. Analytic-element geometry and attributes were converted directly from the GIS polygons using the tools available in ArcAEM (Silavisesrith and Matott 2005). Each element was assigned an initial guess and possible range of hydraulic conductivity to be used in model calibration.
Terrain height error data for the study region were not available for this project, so an analysis of SRTM error was conducted using a comparison of published DEM sources. Observed surface-water elevations were collected and processed from SRTM Version 1 data. Observation points include two sets of data: isolated seepage lakes and isolated wetlands. It was expected that the frozen open water elevations of seepage lakes would most closely resemble USGS DEM elevations, while SRTM elevations would be higher in the wetlands than in the surface water. USGS DEM elevations in forests are corrected manually to represent the underlying topography while the SRTM elevations usually represent canopy heights.
Figure 3 shows the comparison between USGS DEM and SRTM DEM elevations for seepage lakes (125 samples), open wetlands (170 samples), and forested wetlands (131 samples). There is a small (0.4 m) bias toward greater SRTM elevations in the seepage lakes. This bias is possibly due to snow cover; the average snow pack depth in Trout, Crystal, and Sparkling Lakes taken 21–24 February 2000, for example, was 0.24 m (Rusak 2005). The bias may also reflect temporal changes in water level between the acquisition time of the SRTM and the creation of the USGS DEM. There is a much larger bias (3.1 m) toward greater SRTM elevations in the forested wetlands, as expected. What was not expected, however, was that the open wetlands, as classified by radar backscatter, still show a large bias toward SRTM elevations (2.3 m). Though this bias is not as great as for forested wetlands, it indicates that the classification method using radar backscatter was not entirely effective. For the remainder of the study, therefore, the forested and non-forested wetland elevations were treated the same for calibration purposes.

Statistical analysis of the difference between SRTM and USGS DEM data (meters). The box represents the extent of the second and third quartile of the data and the bars the range (max, min)
To evaluate the influence of the different types of radar-derived surface-water elevations on the numerical flow model, two calibration schemes were compared. For calibration 1, all observation types (seepage lakes, open wetlands, forested wetlands) were included. For calibration 2, only seepage lakes were considered (all wetland observations were excluded from the calibration). Table 1 shows the number of observations for each classification, as well as the statistical analysis of the difference from the USGS DEM.
Calibration was carried out entirely within the GIS-based ArcAEM environment. ArcAEM writes the input files for the AEM solver, Split, and the calibration tool, Ostrich. Ostrich makes repeated calls to Split, adjusting parameters between each run until the objective function (the difference between measured and predicted heads in this case) is minimized. A Levenberg-Marquardt optimization algorithm was used to carry out the calibrations (Levenberg 1944; Marquardt 1963; Matott 2005). The starting guess values and range for each of the six simultaneously varied parameters are listed in Table 2. The calibration was considered sufficient when the change in the weighted sum of square errors between observed and predicted heads was less than 0.001 m.
Results and discussion
The final calibrated model parameters are listed in Table 2, including the statistical output from Ostrich. A comparison of calibrations 1 and 2 (wetlands included and removed, respectively) suggests removal of the wetland data from the calibration process produces markedly different estimates in transmissivity (Table 2). The conclusion is, therefore, that the use of the 284 additional wetland observation points does influence model results. Without independent well head data, it is difficult to know which model is the more realistic. Given the bias in the wetland data (Fig. 3), it would seem that the model including only the seepage lake observation data would produce a better model fit. An analysis of the model residuals (Fig. 4) confirms that residuals are greatest for the wetlands, and smaller for the seepage lakes. In this model, however, parameter zones (heterogeneities) are well represented by both seepage and wetland observations. Even with the apparent bias, wetland observations may be valuable in models where there are no open-water elevations because of weak radar return.

Distribution of model residuals for calibration 1
Calibrated transmissivity values for each zone ranged from highs of 2,000–3,000 m2/day (background zone), to lows of 70–90 m2/day. However, in comparison between the two calibrations, some of the calibrated transmissivity values varied by more than an order of magnitude. Specifically, zone 1 was found to have much lower transmissivity and zone 2, a much higher transmissivity without consideration of wetlands. This difference can likely be attributed to an uneven spatial distribution of observation data. Zone 1 is completely absent of observation data. Additionally, the only head specification is a single drainage lake (and associated stream connections). Zone 2 has 9 seepage lakes, 17 open wetlands, and 13 forested wetlands. By removing these 30 wetland observations, the calibration procedure is much less rigorous in this northern section of the model area.
The model-predicted potential and residuals for calibration 1 are shown in Fig. 5. Red contours show groundwater potential (hydraulic head) with the highest water table elevation in the center and northeastern portions of the model. The relative magnitude of model residuals (predicted–observed head) are indicated by the varied symbols. Absolute residuals varied for all three types of observations (seepage lakes, open and forested wetlands) from less than 0.005 m to as high as 20 m (Fig. 4).

Map of calibration 1 model results with red contours representing groundwater potential (with a 2 m contour interval labeled in m asl). Colored points are relative representations of calibrated model residuals. Blue, red, and green dots represent seepage lakes, open wetlands, and forested wetlands, respectively. See Fig. 2 for key to shaded areas (conductivity zones)
Conclusions
Inherent in the modeling of ground-water flow is the use of surficial hydrologic features to develop boundary conditions and water-table observations of the model. One potential method for incorporating this data is through remote sensing. The remote sensing of wetland elevations were of particular interest in this study because they can be the only reliable source of water elevations for off-nadir radar interferometry. Classification of open and forested wetlands using SRTM C-band backscatter appeared to be ineffective because open and forested wetlands showed similar elevation bias when compared to the USGS DEM. It was not possible, therefore, to weight open and forested wetlands differently in the calibration scheme used in this study and the classification method using only radar backscatter signature, therefore, requires further refinement.
This research illustrates the integration of remotely sensed data, geographic information systems, and numerical groundwater flow modeling. The entire model was calibrated to space-based potential measurements. The NHLR is particularly well suited to the research because groundwaters are exposed in thousands of seepage lakes and wetlands. The presence of a large number of lakes provided ample data for the error analysis reported here, but the technique is theoretically applicable wherever groundwater and surface water are intimately related. This condition is expected to occur wherever groundwater recharge exceeds the capacity of aquifers to drain precipitation (Haitjema and Mitchell-Bruker 2005). Although hydrologic analysis based entirely on remotely sensed data is fraught with risks, this may be the only practical approach to understanding the role of groundwater in the global hydrologic cycle.
References
Abdelfattah R, Nicolas JM (2002) Topographic SAR interferometry formulation for high-precision DEM generation. IEEE Trans Geosci Remote Sens 40(11):2415–2426
Attig JW (1985) Pleistocene geology of Vilas County, Wisconsin. Geological and Natural History Survey, Inform Circ Wisconsin 50:32
Bandilla K, Suribhatla R, Jankovic I (2005) SPLIT: Win32 computer program for analytic-based modeling of single-layer groundwater flow in heterogeneous aquifers with particle tracking, capture-zone delineation, and parameter estimation. University at Buffalo, Buffalo, NY
Becker MW (2006) Potential for satellite remote sensing of groundwater. Ground Water 44(2):306–318
Bourgeau-Chavez LL et al (2001) Analysis of space-borne SAR data for wetland mapping in Virginia riparian ecosystems. Int J Remote Sens 22(18):3665–3687
Chipman JW (2001) Topographic mapping of forested areas in the western Great Lakes region using spaceborne synthetic aperture radar interferometry. University of Wisconsin-Madison, Madison, WI, p 182
Dobson MC et al (1992) Dependence of radar backscatter on coniferous forest biomass. IEEE Trans Geosci Remote Sens 30(2):412–415
Dripps WR, Hunt RJ, Anderson MP (2006) Estimating recharge rates with analytic element models and parameter estimation. Ground Water 44(1):47–55
Durden SL, Vanzyl JJ, Zebker HA (1989) Modeling and observation of the radar polarization signature of forested areas. IEEE Trans Geosci Remote Sens 27(3):290–301
Elachi C (1980) Spaceborne imaging radar: geologic and oceanographic applications. Science 209(4461):1073–1082
Evans DL (1999) Applications of imaging radar data in earth science investigations. Electron Comm Eng J 11(5):227–234
ESRI (2001) ArcGIS. Environmental Systems Research Institute, Redlands, CA
Fredrick KC, Becker MW, Flewelling DM, Silavisesrith W, Hart ER (2004) Enhancement of aquifer vulnerability indexing using the analytic-element method. Environ Geol 45:1054–1061
Graczyk DJ, Hunt RJ, Greb SR, Buchwald CA, Krohelski JT (2003) Hydrology, nutrient concentrations, and nutrient yields in nearshore areas of four Lakes in Northern Wisconsin, 1999–2001. 03–4144, USGS, Reston, VA
Haitjema HM (1995) Analytic element modeling of groundwater flow. Academic Press, San Diego, CA, p 394
Haitjema HM, Mitchell-Bruker S (2005) Are water tables a subdued replica of the topography? Ground Water 43(6):781–786
Harrell PA, BourgeauChavez LL, Kasischke ES, French NHF, Christensen NL (1995) Sensitivity of ERS-1 and JERS-1 radar data to biomass and stand structure in Alaskan boreal forest. Remote Sens Environ 54(3):247–260
Hess LL, Melack JM, Simonett DS (1990) Radar detection of flooding beneath the forest canopy: a review. Int J Remote Sens 11(7):1313–1325
Hess LL, Melack JM, Filoso S, Wang Y (1995) Delineation of inundated area and vegetation along the Amazon Floodplain with the Sir-C synthetic-aperture radar. IEEE Trans Geosci Remote Sens 33(4):896–904
Hoffmann J (2005) The future of satellite remote sensing in hydrogeology. Hydrogeol J 13(1):247–250
Hunt RJ (2006) Ground water modeling applications using the analytic element method. Ground Water 44(1):5–15
Hunt RJ, Anderson MP, Kelson VA (1998) Improving a complex finite-difference ground water flow model through the use of an analytic element screening model. Ground Water 36(6):1011–1017
Jankovic I, Barnes R (1999) High-order line elements in modeling two-dimensional groundwater flow. J Hydrol 226:211–223
Jordan RL, Huneycutt BL, Werner M (1995) The SIR-C/X-SAR Synthetic Aperture Radar system. IEEE Trans Geosci Remote Sens 33(4):829–839
Kasischke ES, Melack JM, Dobson MC (1997) The use of imaging radars for ecological applications: a review. Remote Sens Environ 59(2):141–156
Krabbenhoft DP, Bowser CJ, Anderson MP, Valley JW (1990) Estimating groundwater exchange with lakes. 1. The stable isotope mass balance method. Water Resour Res 26(10):2445–2453
Kratz TK, Webster KE, Bowser CJ, Magnuson JJ, Benson BJ (1997) The influence of landscape position on lakes in northern Wisconsin. Freshw Biol 37(1):209–217
Levenberg K (1944) A method for the solution of certain non-linear problems in least squares. Q Appl Math 2:164–168
Lohmann D et al (2004) Streamflow and water balance intercomparisons of four land surface models in the North American land data assimilation system project. J Geophys Res Atmos 109(D7):22
Marquardt DW (1963) An algorithm for least-squares estimation of nonlinear parameters. J Soc Ind Appl Math 11:431–441
Matott LS (2005) OSTRICH: an optimization software tool: documentation and user’s guide. University at Buffalo, Buffalo, NY
McDonald KC, Dobson MC, Ulaby FT (1991) Modeling multifrequency diurnal backscatter from a walnut orchard. IEEE Trans Geosci Remote Sens 29(6):852–863
Michaels SS (1995) Regional analysis of lakes, groundwaters, and precipitation, northern Wisconsin: a stable isotope study. University of Wisconsin-Madison, Madison, WI, p 151
Moghaddam M, Durden S, Zebker H (1994) Radar measurement of forested areas during otter. Remote Sens Environ 47(2):154–166
NTL-LTER (2004) National Science Foundation, North Temperate Lakes Long Term Ecological Research. Center for Limnology, University of Wisconsin at Madison, Madison, WI
Patterson GL (1989) Water resources of Vilas County, Wisconsin, Miscellaneous Paper, Wisconsin Geological and Natural History Survey, Madison, WI, pp 46
Pint CD (2002) A groundwater flow model of the Trout Lake basin; calibration and lake capture zone analysis. University of Wisconsin-Madison, Madison, WI, p 123
Pint CD, Hunt RJ, Anderson MP (2003) Flowpath delineation and ground water age, Allequash Basin, Wisconsin. Ground Water 41(7):895–902
Poeter EP, Hill MC (1997) Inverse models: a necessary next step in ground-water modeling. Ground Water 35(2):250–269
Pope KO, Reybenayas JM, Paris JF (1994) Radar remote-sensing of forest and wetland ecosystems in the Central American tropics. Remote Sens Environ 48(2):205–219
Pope KO, Rejmankova E, Paris JF, Woodruff R (1997) Detecting seasonal flooding cycles in marshes of the Yucatan Peninsula with SIR-C polarimetric radar imagery. Remote Sens Environ 59(2):157–166
Rabideau AJ et al (2007) Analytic element modeling of supra-regional groundwater flow: concepts and tools for automated model configuration. J Hydrol Eng 12(1), (in press)
Rabus B, Eineder M, Roth A, Bamler R (2003) The shuttle radar topography mission: a new class of digital elevation models acquired by spaceborne radar. ISPRS J Photogramm Remote Sens 57(4):241–262
Rodriguez E et al (2004) An assessment of the SRTM topographic products: a final report to NIMA. Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA
Rusak JA (2005) Physical limnology of the North Temperate Lakes primary study lakes, North Temperate Lakes Long-term Ecological Research Program, Natural Science Foundation. Center for Limnology, University of Wisconsin-Madison, Madison, WI
Silavisesrith W, Matott LS (2005) ArcAEM: GIS-based application for analytic element groundwater modeling. Buffalo, NY
Smith LC (2002) Emerging applications of interferometric synthetic aperture radar (InSAR) in geomorphology and hydrology. Ann Assoc Am Geogr 92(3):385–398
Snedecor GW, Cochran WG (1980) Statistical methods. Iowa State University Press, Ames, IA, pp xvi and 507
Townsend PA (2002) Estimating forest structure in wetlands using multitemporal SAR. Remote Sens Environ 79(2–3):288–304
Ulaby FT, Sarabandi K, McDonald K, Whitt M, Dobson MC (1990) Michigan microwave canopy scattering model. Int J Remote Sens 11(7):1223–1253
Wang Y, Day JL, Davis FW (1998) Sensitivity of modeled C- and L-band radar backscatter to ground surface parameters in loblolly pine forest. Remote Sens Environ 66(3):331–342
Wuolo RW, Dahlstrom DJ, Fairbrother MD (1995) Wellhead protection area delineation using the analytic element method of groundwater modeling. Ground Water 33(1):71–83
Acknowledgements
This work was supported by the NASA New Investigator Program (NAG5-10608) as well as the NSF Information Technology Research Program (IIS-0426557). Development of software used for this research, Split, Ostrich, and ArcAEM, was funded by the US Environmental Protection Agency’s (EPA) Science to Achieve Results (STAR) program, under Grant No. R82-7961. Comments on the initial draft of the manuscript by Alan Rabideau are greatly appreciated. The author would like to thank Tom Farr of JPL for generously sharing remotely sensed data, as well as Jörn Hoffmann, Randall J. Hunt, and an anonymous reviewer for their thoughtful insight and critical review of this work.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Fredrick, K.C., Becker, M.W., Matott, L.S. et al. Development of a numerical groundwater flow model using SRTM elevations. Hydrogeol J 15, 171–181 (2007). https://doi.org/10.1007/s10040-006-0115-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10040-006-0115-3