
Abstract
This paper deals with the local bifurcation analysis of a nanotube with a nanostring passing through it. Eringen’s two-phase local/nonlocal model and Eringen’s differential model are employed as constitutive equations. The governing equations are derived as two nonlinear first-order systems of ordinary differential equations. Nonlinear analysis is performed by using the Lyapunov–Schmidt method. The influence of the small length scale parameter and the phase parameter on critical buckling load, type of bifurcation and post-buckling shape of the nanotube is examined for both types of constitutive equations. Depending on the values of the small length scale parameter and the phase parameter, the critical buckling load corresponding to Eringen’s two-phase local/nonlocal model can be greater or less than that corresponding to Eringen’s differential model. It is shown that for both models supercritical pitchfork bifurcation occurs. The post-buckling shapes of nanotube, obtained by numerical integration, exhibit a qualitative difference between the two models.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
During the past two decades, nanomechanics has been one of the main fields of research in mechanics and engineering. In particular, the bifurcation analysis of nanostructures, such as rods, has attracted significant attention from researchers. The initial step in such an analysis is the formulation of appropriate constitutive equations which take into account relevant physical phenomena. Namely, due to the enormous computational cost of molecular dynamics and objective problems in performing experiments at nanoscale, nonlocal continuum constitutive theories remain the most common tools for analyzing the nanostructures. The foundational works in nonlocal continuum mechanics theories are presented in [1,2,3]. Subsequently, several nonlocal continuum constitutive theories have been developed, including Eringen’s nonlocal integral model (strain-driven integral model) [4], Eringen’s differential model [5], Eringen’s two-phase local/nonlocal model (local/nonlocal strain-driven model) [4, 6], the nonlocal integral stress-driven model [7,8,9], the two-phase local/nonlocal stress-driven model [10], the modified couple stress and the nonlocal strain gradient theory. Among these theories, the most commonly used is Eringen’s differential model. Its application to the buckling and dynamic behavior of nanorods began with [11] and since then it has been used many times. Although Eringen’s differential model has allowed researchers to obtain many significant analytical results, it has become apparent that this method lacks consistency. Among other papers, these inconsistencies are addressed in [11] and [12]. One of these inconsistencies is the well-known paradox of a cantilever beam subjected to a concentrated load at its end. To overcome these inconsistencies, some researchers [13,14,15] have attempted to utilize Eringen’s nonlocal integral model. However, as shown by [9] the use of Eringen’s nonlocal integral model, in general, leads to ill-posed problems. A solution to the aforementioned problems was found by employing Eringen’s two-phase local/nonlocal model [9] which is widely accepted in the literature [8, 12, 15,16,17,18,19,20,21,22,23,24,25,26,27,28,29].
Therefore, our main focus in the following will be on Eringen’s two-phase local/nonlocal model. The rationale for its use is justified by the fact that Eringen’s two-phase local/nonlocal model yields a well-posed problem, eliminating the paradox of a cantilever with a concentrated load at its end [9, 12]. Additionally, the aforementioned model, produces a softening effect [12, 18] which is physically acceptable in the buckling problem addressed here. Alongside Eringen’s two-phase local/nonlocal model, we will also utilize Eringen’s differential model to compare the two models.
As mentioned earlier, the main aim of this paper is to focus on the linear and nonlinear analysis of nonlocal elastic rods. In order to demonstrate the practical applications of nonlocal theory in column buckling and post-buckling, we refer to several studies. Some notable buckling problems include: the buckling of nanotubes with classical boundary conditions [18, 30], buckling of embedded nanotubes under thermal effects [31], buckling of shearable nanorods [32], buckling of rotating nanorods [33], buckling of multiwalled carbon nanotubes [34], buckling of heavy nanorods [35], lateral-torsional buckling [36], among others. It is worth noting that some results presented in this paper are consistent with those of [32] and [18]. Regarding the post-buckling of nanorods, some of relevant papers are [37,38,39,40,41,42,43,44,45,46]. Among these papers, it is important to mention [45], as we will apply the same analytical method for nonlinear analysis.
In this paper, we will examine a nanotube through which a nanostring passes with a constant velocity. The nanotube will be clamped at its ends, contrary to the case treated in [47]. In order to simplify the analysis, we assume that the nanostring is inextensible, henceforth referred to as a string in the remainder of the paper. Owing to the development of nanotechnology this system can be considered as part of nanodevices and nanomachines [48]. The goal of this paper is to perform a nonlinear local bifurcation analysis of the divergence type of the nanotube. This means that, as in [47], only the number of equilibrium configurations near bifurcation points will be examined. This goal will be achieved by employing the analytical methods of nonlinear bifurcation analysis. In particular, the stability boundary and post-buckling behavior will be examined by using the Lyapunov–Schmidt method. It is noteworthy that the use of analytical methods in nonlinear analysis is one of the advantages of this paper, as numerical methods are typically applied in the analysis of nanorods described by two-phase local/nonlocal models [46]. The governing equations will be nonlinear due to geometric nonlinearity since the constitutive equations will be linear. We assume that the nanotube is inextensible and unshearable. The main focus of the paper will be to determine the influence of the parameters in the constitutive equations (the small length scale parameter and the phase parameter) on the buckling and post-buckling behavior of the nanotube.
In particular, for both models under consideration, we will first derive the governing equations for the nanotube in a suitable form for bifurcation analysis. Subsequently, we will analytically determine characteristic equations and solutions to the linear governing equations. It is worth noting that the form of the characteristic equations allows us to distinguish between symmetrical and antisymmetrical solutions. Next, we will apply nonlinear analysis to obtain bifurcation equations. Finally, the influence of nonlocal effect on the critical buckling load, the type of bifurcation and the post-critical shape of the nanotube is presented for both models.
2 Mathematical formulation
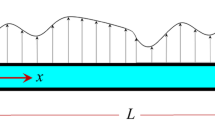
Let us consider an inextensible and unshearable nanotube of length L. Through the nanotube an inextensible string is passing. On the left hand side of the nanotube, the string is pulled to the left with a constant velocity v, while on the right hand side, the string moves freely over a smooth surface. The nanotube is clamped at both ends with the movable right support (Fig. 1).

A nanotube through which passes a string
In the bifurcation analysis that follows, we assume that there is a friction force between the nanotube and the string. The frictional force per unit length F is assumed to be an arbitrary function of the velocity v. In this case, as shown in [47], the normal force N between the nanotube and the string per unit length is of the form
where S is the arc length of the nanotube, \(\frac{d(\cdot )}{\textrm{d}S}=(\cdot )^{\prime }\),\(\ \rho \) is the uniform mass density of the string per unit length and \(\varphi \) is the slope of the tangent to the nanotube axis (Fig. 2).

An elementary part of the nanotube
In order to derive the equilibrium equations of the nanotube we introduce the coordinate system xAy and the unit normal and tangential vectors \(\textbf{n}\) and \(\textbf{t}\), respectively (Figs. 1 and 2). Since an elementary part of the nanotube is in equilibrium the resultant force of the system acting on that part is equal to zero, i.e.,
where \(\textbf{R}\) is the contact force (Fig. 2). From (2) it follows
or, in scalar form
where \(D_{1}\) and \(D_{2}\) are arbitrary constants and \(R_{x}\) and \(R_{y}\) are the components of the contact force along the x and y axes with the unit vectors \(\textbf{i}\) and \(\textbf{j}\). Because the resultant moment also has to be zero in equilibrium, it follows that
where (4) is used and M is the bending moment. For an inextensible nanotube the following geometrical relations hold
With the help of the geometrical relations (6), the equilibrium Eq. (5) can be integrated to obtain
Since the right support of the nanotube moves freely in the horizontal direction the following boundary conditions hold (Fig. 1)
From (4)\(_{1}\) and (8)\(_{4,6}\), we get
while using (6), (7) and (8)\(_{1,2,3,5,6}\) it follows that
Substituting (9) and (10)\(_{1}\) into the equilibrium Eq. (5) we obtain
Next, we introduce constitutive equations for the nanotube. Our intent is to address both Eringen’s two-phase local/nonlocal model and Eringen’s differential model.
2.1 Eringen’s two-phase local/nonlocal model
First, we adopt a model that takes into account both local and nonlocal elasticity i.e., Eringen’s two-phase local/nonlocal model [4, 6, 49,50,51]. This model consists of the convex mixture of local and nonlocal phases and is widely used as mentioned before. In particular, this means that the normal stress in a cross section of the nanotube is given by
where \(0<\zeta \le 1\) is the phase parameter, \(L_{c}>0\) is the small length scale parameter, E is the modulus of elasticity, and \(\varepsilon \) is the normal strain. We note that in (12) the Helmholtz kernel \(e^{- \frac{\left| S-\xi \right| }{L_{c}}}\) is used. Following the standard procedure, as presented in [11], Eq. (12) can be adapted to the theory of inextensible and unshearable nanorods with constant cross-sections. In particular, we obtain
where I is the second moment of inertia and \(\kappa \) is the curvature of the rod axis. We note that (13) is in agreement with [23, 25]. As shown in [9, 52], the constitutive Eq. (13) is equivalent to
subject to
Accounting for the definition of the curvature of the inextensible nanotube axis
and then substituting (16) into (14) and (15) we obtain
subject to
Next, we transform Eqs. (8)\(_{3,6},\) (11), (17) and (18) into suitable forms for bifurcation analysis. To that end, we first define new quantities
With the help of (19), Eqs. (8)\(_{3,6},\) (11), ( 17) and (18) become the fifth-order system of ordinary differential equations
subject to
If we introduce the following dimensionless quantities
Equations (20) and (21) become
subject to
where the notation \(\frac{d(\cdot )}{\textrm{d}t}=\overset{{\cdot }}{(\cdot )}\) is used. We note that for \(\zeta =1\) we cover the classical Bernoulli–Euler theory since in this case (23)\(_{2,4}\) and (24)\(_{3,4}\) imply \( \overline{Q}=\overline{K}=0\), which transforms (23) and (24) into
subject to
In order to simplify the derivations, from now on we will assume that \(0<\zeta <1\). The results corresponding to the classical Bernoulli–Euler theory, follow as a special case when \(\zeta \rightarrow 1\). This can be checked by analyzing (25) and (26) instead of (23) and (24). Now, we put (23) and (24) into a compact form by defining a vector \(\textbf{x}=( \overline{M},\overline{K},\varphi ,\overline{Q},\overline{r})^{T}\) and two function spaces
These spaces are endowed with the usual sup norms [53,54,55]. Now, we can construct the operator \({\varvec{\Phi }}:\textbf{U}\times \mathbb {R} _{+} \rightarrow \textbf{Y}\) as
where \(\textbf{U}\) is a small neighborhood of \(\textbf{x}=(0,0,0,0,0)^{T}\) in \(\mathbf{X.}\) With the help of (28), Eqs. (23) and (24) become
which is the governing equation for Eringen’s two-phase local/nonlocal model.
2.2 Eringen’s differential model
In the case of Eringen’s differential model, the constitutive equation in dimensionless form reads [45, 56, 57]
which along with (22), (23)\(_{1,5}\) and (24)\(_{1,2,5}\) leads to the dimensionless governing equations
subject to
After defining a vector \(\textbf{z}=(\overline{M},\varphi ,\overline{r})^{T}\) and two function spaces
endowed with the usual sup norms we introduce the operator \( {\varvec{\Psi }}:\textbf{V}\times \mathbb {R} _{+}\rightarrow \textbf{W}\) as
where \(\textbf{V}\) presents a small neighborhood of \(\textbf{z}=(0,0,0)^{T}\) in\( \mathbf{Z.}\) Now, the system given by (31) and (32) is of the form
which presents the governing equation for Eringen’s differential model.
3 Bifurcation analysis
In this section, we perform a local bifurcation analysis for the two models of the nanotube. For a bifurcation parameter, we choose \(\mu \).
3.1 Eringen’s two-phase local/nonlocal model
Before proceeding further, it is worth mentioning that the operator \({ {\varvec{\Phi }} }\) possesses two interesting properties
Equation (36)\(_{1}\) means that \(\mathbf{x=0}\) is a trivial solution. In particular, our goal in this section is to find two things: the values of \( \mu \) at which nontrivial solutions branch off from the trivial solution (bifurcation points) and the type of bifurcation. As a consequence, we have to solve the equation
in the neighborhood of \(\mathbf{x=0}\). As the first step in that direction, the continuous linear operator \(\textbf{L}(\mu ):\textbf{X}\rightarrow \textbf{Y}\) is defined as
where \(D_{\textbf{x}} {\varvec{\Phi }} \mathbf{(0,}\mu \mathbf{)}\) is the Fréchet derivative of \({ {\varvec{\Phi }} }\) with respect to \(\textbf{x}\)at \(\mathbf{x=0.}\) Next, we solve the equation
From this equation we get
subject to
We note that both operators determined by (39) and by (40), (41) lead to the same necessary condition for the existence of a nontrivial solution to (39). Also, both operators are non-self-adjoint.
Before continuing we comment on the linear problem (40), (41) to provide it with additional physical meaning. Namely, this problem can be used for linear analysis of a compressed clamped nanotube with Eringen’s two-phase local/nonlocal model if the dimensionless velocity \(\mu \) is identified with a dimensionless compressive force. To see that we linearize (6)\(_{2}\) and then use the dimensionless quantities (22) to get
Now, from (39) we obtain
where \(C_{5}\) is an arbitrary constant. Using the above equation and the boundary conditions (8)\(_{2,5},\) the system (40), (41) can be transformed into
subject to
The system (42), (43) has the same form as the system (25), (27) and (30) obtained in [18], where the linear analysis of a compressed nanotube clamped at both ends is performed for Eringen’s two-phase local/nonlocal model.
In order to solve (40) and (41), we first introduce a new independent variable
to obtain the following
subject to
The general solution to (45) reads
where \(C_{i}\ i=1,\ldots ,4\) are arbitrary constants and
After substituting (47) into (45) and using (46) we obtain the condition that ensures the existence of a nontrivial solution of ( 45) and (46), i.e., the characteristic equation
where
It is worth noting that the characteristic Eq. (49) is in agreement with the characteristic Eq. (40) derived by [18], however (49) has more tractable form. Given \(\zeta \) and \(l_{c},\) the values of \(\mu \) satisfying (49) will be called eigenvalues and will be denoted by \(\mu _{n}^{t},\) \(n\in \mathbb {N} \). Numerical analysis suggests that the set of all eigenvalues is countably infinite and that the odd values of n correspond to \( A_{1}=0\) while the even values of n correspond to \(A_{2}=0.\) Hereafter, we refer to \(\mu _{1}^{t}\) and \(\mu _{2}^{t}\) as the lowest and second lowest eigenvalues, respectively. The solutions to (39), corresponding to \(\mu =\mu _{n}^{t}\), follow from (40), (41) and (44)–(48) as
where \(B_{1n}\) are arbitrary constants and the function g(t) is of the form
We note that numerical analysis shows that if (49) holds then the case \(A_{1}=A_{2}=0\) is not observed for the values of the parameters under consideration. Equations (51) and (52) reveal the following
which in turn leads to the symmetry and antisymmetry of solutions of the linear problem (51). In particular, we get
and
From (51) and the preceding observations, we can conclude that if \( A_{1}=A_{2}=0\) is not satisfied, then the dimension of the null space of \( \textbf{L}(\mu _{n}^{t})\) is one, i.e., dim \(N(\textbf{L}(\mu _{n}^{t}))=1.\) Next, we define an inner product on \(\textbf{Y}\) in the following way
This definition allows us to introduce the adjoint \(\textbf{L}^{*}(\mu )\) of \(\textbf{L}(\mu )\) as
where \(\textbf{q}=(q_{m},q_{k},q_{\varphi },q_{q},q_{r})^{T}\in \textbf{Y}\). Our next aim is to solve an adjoint problem, i.e., the operator equation
Keeping (53) and (54) in mind the adjoint problem (55) can be written in the form
subject to
By comparing (39) to Eqs. (56) and (57), we can draw a conclusion that the solution to the adjoint problem reads
where \(B_{2n}\) are arbitrary constants. From (51) and (58), it follows that the dimension of the null space of the adjoint operator \(\textbf{L} ^{*}(\mu _{n}^{t})\) is also one, i.e., dim \(N(\textbf{L}^{*}(\mu _{n}^{t}))=1.\) Let \(\textbf{q}^{*}\) be a nonzero element of the null space of the adjoint operator \(\textbf{L}^{*}(\mu _{n}^{t}).\) Then, by using the Fredholm alternative [58, 59], the range of \( \textbf{L}(\mu _{n}^{t})\) can be characterized by
This allows the splitting of the space \(\textbf{Y}\) as \(\textbf{Y}=\) \(N(\textbf{L} ^{*}(\mu _{n}^{t}))\oplus R(\textbf{L}(\mu _{n}^{t}))\). As a consequence, codim \(R(\textbf{L}(\mu _{n}^{t}))=1<\infty \) implying that \(\textbf{L}(\mu _{n}^{t})\) is the Fredholm operator with index zero which, in turn, makes it possible to use the method of Lyapunov–Schmidt [60,61,62,63,64,65]. In particular, we first set \(\mu =\mu _{n}^{t}+\Delta \mu \) in (37) and assume the solution to (37) in the form
where \(\textbf{u}(a\textbf{x}_{n},\Delta \mu )\) belongs to the closed complement of \(N(\textbf{L}(\mu _{n}^{t}))\) in \(\textbf{X}\) and a is a real parameter. Substituting (60) into (37) and then projecting (37) onto \(N(\textbf{L}^{*}(\mu _{n}^{t}))\) along \(R(\textbf{L}(\mu _{n}^{t}))\) we get the following bifurcation equation
Using (59) and \(\int _{0}^{1}\varphi _{n}\textrm{d}t=0\), the Taylor expansion of the bifurcation Eq. (61) in the neighborhood of \((a,\Delta \mu )=(0,0)\) yields
where the coefficients read
If \(A_{1}=0\), then \(\overline{r}_{n}=0\) which leads to
Taking into account (36)\(_{2}\), the bifurcation Eq. (62) becomes
which after the use of the implicit function theorem yields the solution that bifurcates from the trivial one
Thus, if \(b_{1n}\ne 0\), \(b_{3n}\ne 0,\) then (65) leads to the main conclusion of this section that at \((\textbf{x},\mu )=(\textbf{0},\mu _{n}^{t}) \) pitchfork bifurcations occur. It is noteworthy that the application of the Lyapunov–Schmidt method to the classical Bernoulli–Euler case, described by (25) and (26), yields the same form of the bifurcation equation as the one given by (62) and (63) since the parameters \( l_{c}\) and \(\zeta \) do not appear explicitly in (63).
3.2 Eringen’s differential model
In the case of the nanotube described by Eringen’s differential model, the governing equation is given by (35). We remark that the operator \({ {\varvec{\Psi }} }\) satisfies equations which are analogous to (36). Since the bifurcation analysis of (35) requires the same procedure as in the case of Eringen’s two-phase local/nonlocal model, we will present only the main results. First, taking the Fréchet derivative of (35), the following is obtained
subject to
subject to
Applying a procedure similar to that used for Eringen’s two-phase local/nonlocal model to the system (68) and (69), we can transform it into
subject to
where \(C_{6}\) is an arbitrary constant. Now, (71) and the twice differentiated form of Eq. (70) are equivalent to Eqs. (22) and (24) obtained by [32] in the case Bernoulli–Euler theory. This confirms that linear analysis of a compressed nanotube clamped at both ends is equivalent to the one performed in this paper in the case of Eringen’s differential model.
As in the case of Eringen’s two-phase local/nonlocal model, linearization of the nonlinear operator (34) leads to the linear non-self-adjoint operator defined by (66) and (67). In contrast, the linear operator determined by (68) and (69) is self-adjoint, unlike (40) and (41), and provides a necessary condition for the existence of a nontrivial solution to (66) and (67) in the form
where
The values of \(\mu \) satisfying (72) are again eigenvalues and are denoted by \(\mu _{n}^{d},\) \(n\in \mathbb {N} \). The odd values of n correspond to \(G_{1}=0\), while even values of n correspond to \(G_{2}=0\). It is worth noting that \(G_{1}=0\) is in agreement with Eq. (35) derived by [32] in the case Bernoulli–Euler theory. Again, \(\mu _{1}^{d}\) and \(\mu _{2}^{d}\) stand for the lowest eigenvalue and the second lowest eigenvalue, respectively. If \(\mu =\mu _{n}^{d}\), then the solutions to Eqs. (66) and (67) are of the form
where \(H_{1n},\) \(n\in \mathbb {N} \) are arbitrary constants and
In this case, the solutions to (66) and (67) satisfy
and
The Lyapunov–Schmidt method now yields the bifurcation equation
where
In the case of \(G_{1}=0\), the coefficient \(c_{3n}\) reduces to
since \(\overline{r}_{n}=0.\) Again, the implicit function theorem leads to the nontrivial branch
meaning that if \(c_{1n}\ne 0,c_{3n}\ne 0\) then pitchfork bifurcations occur at \((\textbf{z},\mu )=(\textbf{0},\mu _{n}^{d})\).
4 Discussion and results
In this section, we present the results concerning the critical buckling load, the type of bifurcation and the post-buckling shape of the nanotube described by the two types of constitutive equations introduced in Sect. 2.
4.1 Critical buckling load
In what follows, we refer to \(\mu _{1}^{t}\) as the critical buckling load of Eringen’s two-phase local/nonlocal model. In order to describe the influence of the parameters \( l_{c}\) and \(\zeta \) on the critical buckling load \(\mu _{1}^{t}\), we present Figs. 3, 4 and 5. These figures reveal that for a fixed value of \(l_{c}\) a decrease in \(\zeta \) (\(\zeta \) only tends to 0 and 1) causes a decrease in \(\mu _{1}^{t}\). On the other hand, \(\mu _{1}^{t}\) decreases as \(l_{c}\) increases from 0.01 to 0.2, with \( \zeta \) fixed. Figures 3, 4 and 5 suggest that when \(l_{c}\) approaches 0 or \( \zeta \) tends to 1, the critical buckling load \(\mu _{1}^{t}\) tends to \( 4\pi ^{2}\) which corresponds to the classical Bernoulli–Euler theory. From a physical point of view the above remarks mean that an increase in the nonlocal effect causes the nanotube to become less rigid. Therefore, the presence of softening effect is confirmed, i.e., the critical buckling load is reducing if the influence of nonlocality increases.

Dependence of the critical buckling load on the phase parameter \(\zeta \) for Eringen’s two-phase local/nonlocal model and \(l_{c}=0.01\)

Dependence of the critical buckling load on the phase parameter \(\zeta \) for Eringen’s two-phase local/nonlocal model and \(l_{c}=0.1\)

Dependence of the critical buckling load on the phase parameter \(\zeta \) for Eringen’s two-phase local/nonlocal model and \(l_{c}=0.2\)
According to the above introduced terminology \(\mu _{1}^{d}\) is the critical buckling load of Eringen’s differential model. From \(G_{1}=0\), it follows that
which is in agreement with the results presented by [30] and [32].
From the characteristic Eq. (49) and (82), we can numerically determine the value of the phase parameter \(\zeta =\zeta _{b}\) at which the critical buckling load for Eringen’s two-phase local/nonlocal model coincides with that for Eringen’s differential model. The values of \(\zeta _{b}\) for three values of the small length scale parameter \(l_{c}\in \{0.01,0.1,0.2\}\) are presented in Figs. 3, 4 and 5, respectively. These figures allow us to compare the critical buckling loads for the two models under consideration. Figure 3 shows that for \(\zeta \in (\zeta _{b},1)\) the critical buckling load for Eringen’s differential model is lower than that for Eringen’s two-phase local/nonlocal model whereas for \(\zeta \in (0,\zeta _{b})\) the opposite is true. Additionally, for small values of \(l_{c}\), Fig. 3 suggests that there are almost no differences between these two models.
For greater values of \(l_{c}\) (Figs. 4 and 5), the differences between the critical buckling loads of Eringen’s differential model and the ones corresponding to Eringen’s two-phase local/nonlocal model become significant and the interval \((\zeta _{b},1) \) enlarges. However, for all values of \(l_{c}\in \left\{ 0.01,0.1,0.2\right\} \) there exists an interval \((0,\zeta _{b})\) such that for \(\zeta \in (0,\zeta _{b})\) the critical buckling loads for Eringen’s two-phase local/nonlocal model is lower than the ones for Eringen’s differential model (Figs. 3, 4 and 5). In the authors’ opinion, this is a novelty which is important for engineers. It is worth mentioning that numerical investigation reveals that for all \( l_{c}\in (0,1)\) the aforementioned observations still hold.
As mentioned, numerical analysis of (49) and (50) leads to the conclusion that the second lowest eigenvalue \(\mu _{2}^{t}\) of Eringen’s two-phase local/nonlocal model is the lowest solution to \(A_{2}=0\) for \((l_{c},\zeta )\in (0,0.2]\times (0,1).\) Similarly, the second lowest eigenvalue \(\mu _{2}^{d}\) of Eringen’s differential model follows from \(G_{2}=0\) if \( l_{c}\in [0,0.2]\).
4.2 The type of bifurcation
In this subsection, we present the results concerning the type of bifurcation. As shown, for both models we are in the presence of pitchfork bifurcations at \((\textbf{x},\mu )=(\textbf{0},\mu _{n})\) and \((\textbf{z},\mu )=( \textbf{0},\mu _{n}).\) The question that still needs to be answered is whether they are super or subcritical bifurcations. Thus, we will determine the curvatures of the nontrivial branches at the bifurcation points for the relevant values of \(\zeta \) and \(l_{c}\). In particular, the values of \(- \frac{b_{3n}}{b_{1n}}\) and \(-\frac{c_{3n}}{c_{1n}}\) will be calculated. The results are divided into four parts.
-
(a)
In the first part we analyze Eringen’s two-phase local/nonlocal model when \(\mu _{n}^{t}\) is a solution to \(A_{1}=0.\) From (63) and (65), it follows that \(-\frac{b_{3n}}{b_{1n}}>0\) meaning that we are in the presence of a supercritical bifurcation. From the mechanical point of view, this conclusion discovers the following two facts. The phase parameter \(\zeta \) and the small length scale parameter \(L_{c}\) do not influence the type of bifurcation. Second, the bifurcation at \((\textbf{x},\mu )=(\textbf{0},\mu _{n}^{t})\) is always supercritical if \(\mu _{n}^{t}\) is a solution to \( A_{1}=0.\) This is very important since it means that at \((\textbf{x},\mu )=( \textbf{0},\mu _{1}^{t})\), only supercritical bifurcation occurs. From Fig. 6, we can conclude that for \((l_{c},\zeta )\in (0,0.2]\times (0,1),\) an increase in \(l_{c}\) or a decrease in \(\zeta \) rises the curvature \(- \frac{b_{31}}{b_{11}}\) of the nontrivial branch that bifurcates from the trivial branch at \((\textbf{x},\mu )=(\textbf{0},\mu _{1}^{t})\). Also, we remark that when \(\zeta \) tends to 1, the curvature \(-\frac{b_{31}}{b_{11}}\) tends to 1/8 showing that the classical Bernoulli–Euler theory also leads to supercritical bifurcation.
-
(b)
The second part deals with the study of Eringen’s two-phase local/nonlocal model in the case \((\textbf{x},\mu )=(\textbf{0},\mu _{2}^{t})\). As mentioned in the previous subsection \(\mu _{2}^{t}\) is the second lowest eigenvalue and a solution to \(A_{2}=0.\) The values of the curvature \(-\frac{ b_{32}}{b_{12}}\) of the nontrivial branch that bifurcates from the trivial one at \((\textbf{x},\mu )=(\textbf{0},\mu _{2}^{t})\) are given in Fig. 7. This figure reveals that for \((l_{c},\zeta )\in (0,0.2]\times (0,1)\) the curvature \(-\frac{b_{32}}{b_{12}}\) is positive, so that supercritical bifurcation occurs. We remark that when \(\zeta \) is approaching 1 the value of \(-\frac{b_{32}}{ b_{12}}\) is approaching 0.089607, indicating that for the classical Bernoulli–Euler theory supercritical bifurcation occurs. Again, for \((l_{c},\zeta )\in (0,0.2]\times (0,1),\) an increase in \(l_{c}\) or a decrease in \(\zeta \) rises the curvature \(-\frac{b_{32}}{b_{12}}\). Figures 6 and 7 also show that both cases \(-\frac{b_{31}}{b_{11}}\geqq \) \(-\frac{b_{32}}{b_{12}}\) and \( -\frac{b_{31}}{b_{11}}<\) \(-\frac{b_{32}}{b_{12}}\) can occur depending on the values of \(\zeta \) and \(l_{c}\). It is worth mentioning that for other values of \( \mu _{n}^{t}\) which are solutions to \(A_{2}=0,\) a similar procedure can be used to determine the values of \(-\frac{b_{3n}}{b_{1n}}\).
-
(c)
The third part treats Eringen’s differential model when \(\mu _{n}^{d}\) is a solution to \(G_{1}=0.\) From (73), (74), (75), (80) and (82) it follows that
$$\begin{aligned} -\frac{c_{3n}}{c_{1n}}=\frac{1}{8}\left( 1+l_{c}^{2}\chi _{n}\right) =\frac{1 }{8}\left[ 1+\left( 2nl_{c}\pi \right) ^{2}\right] . \end{aligned}$$(83)This shows that only supercritical bifurcations occur when \(G_{1}=0.\) Again, as in the case of Eringen’s two-phase local/nonlocal model the small dimensionless length scale parameter \(l_{c}\) increases the curvature \(-\frac{ c_{3n}}{c_{1n}}\) and does not influence the type of bifurcation. Also, at \(( \textbf{z},\mu )=(\textbf{0},\mu _{1}^{d})\) supercritical bifurcation occurs.
-
(d)
In the fourth part we study Eringen’s differential model in the case of the second lowest eigenvalue \(\mu _{2}^{d}\), which is a solution to \(G_{2}=0\). By integrating (79) and then using \(\mu _{2}^{d}\) from (73)\(_{2,3}\) we get a lengthy expression describing the dependence of \(-\frac{c_{32}}{c_{12}}\) on \(l_{c}\). This relation is presented in Fig. 8 which reveals that we are in the presence of a supercritical bifurcation.

Dependence of the curvature \(-\frac{b_{31}}{b_{11}}\) on \(\zeta \) and \(l_{c}\) for Eringen’s two-phase local/nonlocal model

Dependence of the curvature \(-\frac{b_{32}}{b_{12}}\) on \(\zeta \) and \(l_{c}\) for Eringen’s two-phase local/nonlocal model

Dependence of the curvature \(-\frac{c_{32}}{c_{12}}\) on \(l_{c}\) for Eringen’s differential model
In concluding this subsection, it is worth noting that the types of bifurcation in both models are inherited from the classical Bernoulli–Euler rod theory. This is similar to what was observed in [35, 37, 38, 41, 42].
4.3 The post-buckling shape of nanotube
In order to analyze the post-buckling shape of the nanotube described by Eringen’s two-phase local/nonlocal model, we begin by transforming Eqs. (23) and (24). This means that a new quantity p is introduced as
In this way, by using (6), (8) and (22), Eqs. (23) and (24) become the following two-point nonlinear boundary value problem
subject to
By combining (6), (8), (22), (31), (32) and (84) we get the equations that describe the post-buckling shape in the case of Eringen’s differential model
subject to
Since the bifurcation is supercritical in both cases, we solve the above systems (85), (86) and (87), (88) with \( \mu =\mu _{1}+\Delta \mu \) and \(\Delta \mu >0\). In particular, for the fixed increment \(\Delta \mu =1\), (\(\mu _{1}\) changes depending on the values of parameters), we first numerically solve Eqs. (85) and (86) with \(K= \overline{Q}=0,\zeta =1\) (Bernoulli–Euler model) and then the same equations with \(\zeta =0.2\) and \(l_{c}\in \{0.1,0.2\}\) (Eringen’s two-phase local/nonlocal model). The results for the deflection \(\ \overline{y}(t)\) and bending moment \(\overline{M}(t)\) are given in Figs. 9 and 10, respectively.

Deflections of the nanotube for Eringen’s two-phase local/nonlocal model with \(\zeta =0.2\) and (1) \(l_{c}=0\), (2) \(l_{c}=0.1\), (3) \(l_{c}=0.2\)

Bending moments of the nanotube for Eringen’s two-phase local/nonlocal model with \(\zeta =0.2\) and (1) \(l_{c}=0\), (2) \(l_{c}=0.1\), (3) \(l_{c}=0.2\)
Next, we apply the same numerical procedure to solve (87) and (88) with \(l_{c}\in \{0,0.1,0.2\}\). The graphical representations for this case are given in Figs. 11 and 12.

Deflections of the nanotube for Eringen’s differential model for (1) \(l_{c}=0\), (2) \(l_{c}=0.1\), (3) \(l_{c}=0.2\)

Bending moments of the nanotube for Eringen’s differential model for (1) \(l_{c}=0\), (2) \(l_{c}=0.1\), (3) \(l_{c}=0.2\)
From these figures, it can be concluded that for the fixed increment \(\Delta \mu =1,\) an increase in \(l_{c}\) results in several interesting qualitative observations. First, for both models, the deflection \(\overline{y}(t)\) increases while the bending moment in the middle \(\overline{M} (1/2) \) decreases (Figs. 9, 10, 11 and 12). Second, in the case of Eringen’s two-phase local/nonlocal model the points at which the bending moments vanish are shifted to the ends of the nanotube while for Eringen’s differential model these points do not change their positions. As a consequence the values of the bending moment at the ends and in the middle of the nanotube, in the case of Eringen’s two-phase local/nonlocal model, are not the same (the bending moment in the middle is greater than the ones at the ends of the nanotube). In contrast, in the case of Eringen’s differential model the values of the bending moment in the middle and at the ends are equal.
However, from a quantitative point of view numerical analysis reveals that there are no significant differences in the deflections between the models. Namely, for \(\Delta \mu =1\), \(\zeta =0.2\) and \(l_{c}\in \{0.1,0.2\}\) the differences between maximum deflections of the two models are less than \( 10^{-2}.\) We note that if we fixed \(\mu \) instead of \(\Delta \mu ,\) the differences in the deformed configurations of the two models can be significant.
5 Conclusions
This paper deals with a clamped nanotube through which a string is moving with a constant velocity. In order to account for a nonlocal effect and compare different nonlocal theories two models for the constitutive equation are used: Eringen’s two-phase local/nonlocal model and Eringen’s differential model. The most important results of this paper are as follows:
-
1.
The governing equations of the nanotube for both Eringen’s two-phase local/nonlocal model and Eringen’s differential model are derived in suitable forms given by (29) and (35), respectively. These governing equations consist of nonlinear ordinary differential equations with corresponding boundary conditions. The governing equations do not depend on the frictional force.
-
2.
The characteristic equations for Eringen’s two-phase local/nonlocal model (49) and Eringen’s differential model (72) are derived. From these equations, the critical buckling loads are determined for both models. The differences between the buckling loads in these two cases can be significant, although the effect of nonlocality reduces the critical buckling load in both cases. The critical buckling load corresponding to Eringen’s two-phase local/nonlocal model is lower than that corresponding to Eringen’s differential model for \(\zeta \) in the vicinity of zero and small values of \(l_{c}.\) On the other hand, the critical buckling load of Eringen’s differential model is lower than that of Eringen’s two-phase local/nonlocal model for \(\zeta \) in the vicinity of 1 and small values of \(l_{c}\).
-
3.
The Lyapunov–Schmidt method confirms that the bifurcation points of both models are determined by the eigenvalues of the linearized systems.
-
4.
The bifurcation equations for both models reveal that only pitchfork bifurcations can occur. In the case of Eringen’s two-phase local/nonlocal model, the bifurcation types at the two lowest eigenvalues are supercritical for \((l_{c},\zeta )\in [0,0.2]\times (0,1)\). Additionally, for \(l_{c}\in [0,0.2]\) the types of bifurcation at the two lowest eigenvalues of Eringen’s differential model are supercritical. This means that for these values of \(l_{c}\) and \(\zeta \) the bifurcation types are the same as in the case of the classical Bernoulli–Euler model. However, the parameters \(l_{c}\) and \(\zeta \) influence the curvatures of the nontrivial branches at the bifurcation points in the sense that an increase in \(l_{c}\) or a decrease in \(\zeta \) increases the curvature.
-
5.
By numerical analysis, the post-buckling behaviors of the two models of nanotube are obtained by solving two-point nonlinear boundary value problems. There is a qualitative difference in post-buckling shapes. Also, the post-buckling shapes of the nanotube confirm the existence of a softening effect for both models.
References
Kröner, E.: Elasticity theory of materials with long range cohesive forces. Int. J. Solids Struct. 3, 731–742 (1967). https://doi.org/10.1016/0020-7683(67)90049-2
Krumhansl, J.: Some considerations of the relation between solid state physics and generalized continuum mechanics. In: Kr öner, E. (ed.) Mechanics of Generalized Continua. Iutam Symposia, pp. 298–311. Springer, Berlin (1968)
Kunin, I.A.: The theory of elastic media with microstructure and the theory of dislocations. In: Kröner, E. (ed.) Mechanics of Generalized Continua. Iutam Symposia, pp. 321–329. Springer, Berlin (1968)
Eringen, A.C.: Linear theory of nonlocal elasticity and dispersion of plane waves. Int. J. Eng. Sci. 10(3), 425–435 (1972). https://doi.org/10.1016/0020-7225(72)90050-X
Eringen, A.C.: On differential-equations of nonlocal elasticity and solutions of screw dislocation and surface-waves. J. Appl. Phys. 54, 4703–4710 (1983). https://doi.org/10.1063/1.332803
Eringen, A.C.: Theory of nonlocal elasticity and some applications. Res. Mech. 21, 313–342 (1987)
Romano, G., Barretta, R.: Nonlocal elasticity in nanobeams: the stress-driven integral model. Int. J. Eng. Sci. 115, 14–27 (2017). https://doi.org/10.1016/j.ijengsci.2017.03.002
Romano, G., Barretta, R., Diaco, M.: On nonlocal integral models for elastic nano-beams. Int. J. Mech. Sci. 131–132, 490–499 (2017). https://doi.org/10.1016/j.ijmecsci.2017.07.013
Romano, G., Barretta, R., Diaco, M., Marotti de Sciarra, F.: Constitutive boundary conditions and paradoxes in nonlocal elastic nanobeams. Int. J. Mech. Sci. 121, 151–156 (2017). https://doi.org/10.1016/j.ijmecsci.2016.10.036
Barretta, R., Fabbrocino, F., Luciano, R., Marotti de Sciarra, F.: Closed-form solutions in stress-driven two-phase integral elasticity for bending of functionally graded nano-beams. Phys. E Low-Dimens. Syst. Nanostruct. 97, 13–30 (2018). https://doi.org/10.1016/j.physe.2017.09.026
Peddieson, J., Buchanan, G.R., McNitt, R.P.: Application of nonlocal continuum models to nanotechnology. Int. J. Eng. Sci. 41(3–5), 305–312 (2003). https://doi.org/10.1016/S0020-7225(02)00210-0
Fernández-Sáez, J., Zaera, R.: Vibrations of Bernoulli–Euler beams using the two-phase nonlocal elasticity theory. Int. J. Eng. Sci. 119, 232–248 (2017). https://doi.org/10.1016/j.ijengsci.2017.06.02
Fernández-Sáez, J., Zaera, R., Loya, J., Reddy, J.: Bending of Euler–Bernoulli beams using Eringen’s integral formulation: a paradox resolved. Int. J. Eng. Sci. 99, 107–116 (2016). https://doi.org/10.1016/j.ijengsci.2015.10.013
Tuna, M., Kirca, M.: Exact solution of Eringen’s nonlocal integral model for bending of Euler–Bernoulli and Timoshenko beams. Int. J. Eng. Sci. 105, 80–92 (2016). https://doi.org/10.1016/j.ijengsci.2016.05.001
Eptaimeros, K., Koutsoumaris, C.C., Tsamasphyros, G.: Nonlocal integral approach to the dynamical response of nanobeams. Int. J. Mech. Sci. 115–116, 68–80 (2016). https://doi.org/10.1016/j.ijmecsci.2016.06.013
Khodabakhshi, P., Reddy, J.N.: A unified integro-differential nonlocal model. Int. J. Eng. Sci. 95, 60–75 (2015). https://doi.org/10.1016/j.ijengsci.2015.06.006
Wang, Y.B., Zhu, X.W., Dai, H.H.: Exact solutions for the static bending of Euler–Bernoulli beams using Eringen’s twophase local/nonlocal model. AIP Adv. 6, 085114 (2016). https://doi.org/10.1063/1.4961695
Zhu, X., Wang, Y., Dai, H.-H.: Buckling analysis of Euler–Bernoulli beams using Eringen’s two-phase nonlocal model. Int. J. Eng. Sci. 116, 130–140 (2017). https://doi.org/10.1016/j.ijengsci.2017.03.008
Challamel, N.: Static and dynamic behaviour of nonlocal elastic bar using integral strain-based and peridynamic models. CR Mécanique 346, 320–335 (2018). https://doi.org/10.1016/j.crme.2017.12.014
Khaniki, H.B.: Vibration analysis of rotating nanobeam systems using Eringen’s two-phase local/nonlocal model. Phys. E Low-Dimens. Syst. Nanostruct. 99, 310–319 (2018). https://doi.org/10.1016/j.physe.2018.02.008
Koutsoumaris, C.C., Eptaimeros, K.G.: A research into bi-Helmholtz type of nonlocal elasticity and a direct approach to Eringen’s nonlocal integral model in a finite body. Acta Mech. 229, 3629–3649 (2018). https://doi.org/10.1007/s00707-018-2180-9
Naghinejad, M., Ovesy, H.R.: Free vibration characteristics of nanoscaled beams based on nonlocal integral elasticity theory. J. Vib. Control 24(17), 3974–3988 (2018). https://doi.org/10.1177/1077546317717867
Zhang, P., Qing, H., Gao, C.: Theoretical analysis for static bending of circular Euler–Bernoulli beam using local and Eringen’s nonlocal integral mixed model. Z. Angew. Math. Mech. 99(8), e201800329 (2019). https://doi.org/10.1002/zamm.201800329
Wang, Y., Huang, K., Zhu, X., Lou, Z.: Exact solutions for the bending of Timoshenko beams using Eringen’s two-phase nonlocal model. Math. Mech. Solids 24(3), 559–572 (2019). https://doi.org/10.1177/1081286517750008
Zhang, P., Qing, H., Gao, C.: Analytical solutions of static bending of curved Timoshenko microbeams using Eringen’s two-phase local/nonlocal integral model. Z. Angew. Math. Mech. 100(7), e201900207 (2020). https://doi.org/10.1002/zamm.201900207
Zhang, P., Qing, H.: A bi-Helmholtz type of two-phase nonlocal integral model for buckling of Bernoulli–Euler beams under non-uniform temperature. J. Therm. Stress. 44(9), 1053–1067 (2021). https://doi.org/10.1080/01495739.2021.1955060
Zhang, P., Schiavone, P., Qing, H.: Local/nonlocal mixture integral models with bi-Helmholtz kernel for free vibration of Euler–Bernoulli beams under thermal effect. J. Sound Vib. 525, 116798 (2022). https://doi.org/10.1016/j.jsv.2022.116798
Behdad, S., Arefi, M.: A mixed two-phase stress/strain driven elasticity: in applications on static bending, vibration analysis and wave propagation. Eur. J. Mech. A/Solids 94, 104558 (2022). https://doi.org/10.1016/j.euromechsol.2022.104558
Providas, E.: Closed-form solution of the bending two-phase integral model of Euler–Bernoulli nanobeams. Algorithms 15(5), 151 (2022). https://doi.org/10.3390/a15050151
Wang, Q., Varadan, V.K., Quekc, S.T.: Small scale effect on elastic buckling of carbon nanotubes with nonlocal continuum models. Phys. Lett. A 357, 130–135 (2006). https://doi.org/10.1016/j.physleta.2006.04.026
Murmu, T., Pradhan, S.C.: Thermal effects on the stability of embedded carbon nanotubes. Comput. Mater. Sci. 47, 21–726 (2010). https://doi.org/10.1016/j.commatsci.2009.10.015
Wang, C.M., Zhang, Y.Y., Ramesh, Sai Sudha, Kitipornchai, S.: Buckling analysis of micro- and nano-rods/tubes based on nonlocal Timoshenko beam theory. J. Phys. D: Appl. Phys. 39, 3904–3909 (2006). https://doi.org/10.1088/0022-3727/39/17/029
Atanackovic, T.M., Novakovic, B.N., Vrcelj, Z., Zorica, D.: Rotating nanorod with clamped ends. Int. J. Struct. Stab. Dyn. 15(3), 1450050 (2015). https://doi.org/10.1142/S0219455414500503
Sudak, L.J.: Column buckling of multiwalled carbon nanotubes using nonlocal continuum mechanics. J. Appl. Phys. 94, 7281 (2003). https://doi.org/10.1063/1.1625437
Zorica, D., Challamel, N., Janev, M., Atanackovic, T.M.: Buckling and Postbuckling of a heavy compressed nanorod on elastic foundation. J. Nanomech. Micromech. 7(3), 04017004 (2017). https://doi.org/10.1061/(ASCE)NM.2153-5477.0000124
Challamel, N., Camotim, D., Wang, C.M., Zhang, Z.: On lateral-torsional buckling of discrete elastic systems: a nonlocal approach. Eur. J. Mech. A/Solids 49, 106–113 (2015). https://doi.org/10.1016/j.euromechsol.2014.06.008
Wang, C.M., Xiang, Y., Kitipornchai, S.: Postbuckling of nano rods/tubes based on nonlocal beam theory. Int. J. Appl. Mech. 1(2), 259–266 (2009). https://doi.org/10.1142/S1758825109000150
Setoodeh, A.R., Khosrownejad, M., Malekzadeh, P.: Exact nonlocal solution for postbuckling of single-walled carbon nanotubes. Phys. E Low-Dimens. Syst. Nanostruct. 43(9), 1730–1737 (2011). https://doi.org/10.1016/j.physe.2011.05.032
Wang, Y.Z., Li, F.M.: Nonlinear postbuckling of double-walled carbon nanotubes induced by temperature changes. Appl. Phys. A 121, 731–738 (2015). https://doi.org/10.1007/s00339-015-9471-y
Ghasemi, A., Dardel, M., Ghasemi, M.H., Barzegari, M.M.: Analytical analysis of buckling and post-buckling of fluid conveying multi-walled carbon nanotubes. Appl. Math. Model. 37(7), 4972–4992 (2013). https://doi.org/10.1016/j.apm.2012.09.061
Ansari, R., Faghih, Shojaei M., Mohammadi, V., Gholami, R., Rouhi, H.: Buckling and postbuckling of single-walled carbon nanotubes based on a nonlocal Timoshenko beam model. Z. Angew. Math. Mech. 95(9), 939–951 (2015). https://doi.org/10.1002/zamm.201300017
Challamel, N., Kocsis, A., Wang, C.M.: Discrete and non-local elastica. Int. J. Non-linear Mech. 77, 128–140 (2015). https://doi.org/10.1016/j.ijnonlinmec.2015.06.012
Juntarasaid, C., Pulngern, T., Chucheepsakul, S.: Postbuckling analysis of a nonlocal nanorod under self-weight. Int. J. Appl. Mech. 12(4), 2050035 (2020). https://doi.org/10.1142/S1758825120500350
Lembo, M.: Exact solutions for post-buckling deformations of nanorods. Acta Mech. 228, 2238–2298 (2017). https://doi.org/10.1007/s00707-017-1834-3
Atanacković, T.M., Oparnica, L., Zorica, D.: Bifurcation analysis of the rotating axially compressed nano-rod with imperfections. Z. Angew. Math. Mech. 99(7), e201800284 (2019). https://doi.org/10.1002/zamm.201800284
Qing, H., Cai, Y.: Semi-analytical and numerical post-buckling analysis of nanobeam using two-phase nonlocal integral models. Arch. Appl. Mech. 93, 129–149 (2023). https://doi.org/10.1007/s00419-021-02099-6
Glavardanov, V.B., Atanackovic, T.M.: Stability of a pipe through which a string is pulled. Int. J. Non-Linear Mech. 35(1), 7–20 (2000). https://doi.org/10.1016/S0020-7462(98)00082-1
Kim, K., Guo, J., Xu, X., Fan, D.L.: Recent progress on man-made inorganic nanomachines. Small 11(33), 4037–4057 (2015). https://doi.org/10.1002/smll.201500407
Burhanettin, S.: Altan: uniqueness of initial-boundary value problems in nonlocal elasticity. Int. J. Solids Struct. 25(11), 1271–1278 (1989). https://doi.org/10.1016/0020-7683(89)90091-7
Eringen, A.C.: Nonlocal Continuum Field Theories. Springer, New York (2002)
Polizzotto, C.: Nonlocal elasticity and related variational principles. Int. J. Solids Struct. 38(42–43), 7359–7380 (2001). https://doi.org/10.1016/S0020-7683(01)00039-7
Polyanin, A.D., Manzhirov, A.V.: Handbook of Integral Equations, 2nd edn. Chapman & Hall/CRC, Boca Raton (2008)
Glavardanov, V.B., Maretic, R.B.: Stability of a twisted and compressed clamped rod. Acta Mech. 202, 17–23 (2009). https://doi.org/10.1007/s00707-008-0043-5
Glavardanov, V.B., Maretic, R.B., Zigic, M.M., Grahovac, N.M.: Secondary bifurcation of a shearable rod with nonlinear spring supports. Eur. J. Mech. A/Solids 66, 433–445 (2017). https://doi.org/10.1016/j.euromechsol.2017.08.007
Glavardanov, V.B., Grahovac, N.M., Berecki, A.D., Zigic, M.M.: The influence of foundation nonlinearity on the post-buckling behavior of a shearable rod near double eigenvalues. Int. J. Solids Struct. 203, 236–248 (2020). https://doi.org/10.1016/j.ijsolstr.2020.07.015
Glavardanov, V.B., Spasic, D.T., Atanackovic, T.M.: Stability and optimal shape of Pflüger micro/nano beam. Int. J. Solids Struct. 49(18), 2559–2567 (2012). https://doi.org/10.1016/j.ijsolstr.2012.05.016
Wang, C.M., Xiang, Y., Yang, J., Kitipornchai, S.: Buckling of nano-rings/arches based on nonlocal elasticity. Int. J. Appl. Mech. 04(3), 1250025 (2012). https://doi.org/10.1142/S1758825112500251
Coddington, E.A., Levinson, N.: Theory of Ordinary Differential Equations. Tata McGraw-Hill Publishing Co., Ltd., New Delhi (1987)
Kent, N.R., Edward, B.S., Arthur, D.S.: Fundamentals of Differential Equations and Boundary Value Problems, 7th edn. Pearson, Boston (2018)
Chow, S.-N., Hale, J.K.: Methods of Bifurcation Theory. Springer, New York (1982)
Golubitsky, M.G., Schaeffer, D.G.: Singularities and Groups in Bifurcation Theory, vol. I. Springer, New York (1985)
Troger, H., Steindl, A.: Nonlinear Stability and Bifurcation Theory. Springer, Wien (1991)
Atanackovic, T.M.: Stability Theory of Elastic Rods. World Scientific, Singapore (1997)
Buffoni, B., Toland, J.: Analytic Theory of Global Bifurcation. Princeton University Press, Princeton (2003)
Kielhöfer, H.: Bifurcation Theory: An Introduction with Applications to PDEs. Springer, New York (2004)
Acknowledgements
The authors express sincere gratitude to the Ministry of Science, Technological Development and Innovation and the Faculty of Technical Sciences, University of Novi Sad, since this research has been supported by the Ministry of Science, Technological Development and Innovation (Contract No. 451-03-65/2024-03/200156) and the Faculty of Technical Sciences, University of Novi Sad through project Scientific and Artistic Research Work of Researchers in Teaching and Associate Positions at the Faculty of Technical Sciences, University of Novi Sad (No. 01-3394/1).
Funding
This research has been supported by the Ministry of Science, Technological Development and Innovation (Contract No. 451-03-65/2024-03/200156) and the Faculty of Technical Sciences, University of Novi Sad, through project Scientific and Artistic Research Work of Researchers in Teaching and Associate Positions at the Faculty of Technical Sciences, University of Novi Sad (No. 01-3394/1).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no conflict of interest with respect to the contents of this work.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Berecki, A.D., Glavardanov, V.B., Grahovac, N.M. et al. Bifurcation analysis of a nanotube through which passes a nanostring. Acta Mech (2024). https://doi.org/10.1007/s00707-024-04076-w
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00707-024-04076-w