
Abstract
In this paper, piezoelectric principle based an actuator is design for a micropump, which is suitable for drug delivery systems. The natural frequency and stress analysis have been performed to determine the reliability of the device in terms of minimum safety factor. We have observed the uniform deflections of the actuators by varying the thicknesses of the piezoelectric layer of the actuator. The design of the actuators is considered in circular and rectangular geometry. The materials are selected appropriately such that the component is biocompatible and can be used in biomedical applications. Among the various considerations made on dimensions and geometry, it is observed that the circular piezoelectric actuator undergoes a high displacement of 2950 μm at an infinitesimal thickness of 0.1 μm. At minimum safety factor of one, the maximum stress and voltage the actuator can hold is 596 GPa and 8500 V respectively.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Drug delivery systems are the devices that aim at controlled release of drug into specific point of patients’ body. These are essential for the delivery of required quantity of drug, better treatment, management and progress in medical conditions. The advancement in MEMS technology has paved path for its application in medical field. One such major application is micro-pump of drug delivery systems which involves the principle of micro-fluidics. Micro-fluidics underlies the significance in the processes of injecting, pumping, storing of fluids in micro-channels. Earlier, the drug was released orally or transdermally through the mechanisms of dissolution, diffusion, osmosis and ion exchange. Then, smart delivery systems came into existence but failed to overcome the biological barriers.
Drug should be released into patients’ body at a fixed rate for a given amount of time in predetermined quantity while taking into account the potent of the drug. Earlier, the drug was injected, taken orally or swallowed in terms of tonic.
The most common form of drug intake is tablets or capsules that are swallowed by the patient. The tablet gets settled in the stomach and work in its acidic environment (Lerner et al. 2005; Prakash and Markham 1999). The techniques of drug delivery can be grouped as delayed release, controlled release and sustained release. In sustained release, the drug is delivered only in little quantity at a time. The remaining drug is released gradually over a certain period of time (Sharma et al. 2007). A biocapsule is prepared for the immunization of the cells which is silicon based with encapsulated xenografts for the insulin dependent diabetic patients (Desai et al. 1998; Tao and Desai 2003). An osmotic system is designed to work in the oral cavity and release of the drug into buccal mucosa in micro quantity. This lowers the need for surgery also as this dental implant can be filled by the physician. The congested area of oral cavity and the mechanical load of the device is its drawback (Herrlich et al. 2012). Another drug pumping device was developed involving the principle of pressure gas expansion actuation technique for the painless delivery of morphine into intrathecal space with a reliability of 10 years (Cobo et al. 2015; Gensler et al. 2010).
The micropump is the trending device for medical applications in MEMS technology. The actuator in micropump have got more significance for it invokes the drug through its actuation mechanism creating pressure in the chamber and making the drug release from the micro needles (Karman et al. 2007). A cantilever micropump with valve was fabricated with a flow rate and backpressure is 3.0 ml/min and 9 kPa respectively. The optimal frequency of this piezoelectrically actuated micropump is 0.24 kHz (Junwu et al. 2005). A micropump without valves is designed using ANSYS software based on electro-solid fluid simulation model. The efficiency of the pump varied with the thickness of piezoelectric layer under a constant voltage of 11 V (Cui et al. 2005). An attempt was made to design two micropumps to achieve the purpose of maximum floe rate and reduce the pulsation of flow. At a frequency of 20 Hz and phase shift of 0°, the flow pulsation is 73.2% and 38% and at 180° is 35.2% (Dhananchezhiyana and Hiremath 2016). A bimorph micropump with various microneedles was proposed with flow velocity of 0.7 μl/s for blood. The Reynolds number for water and blood is 38.2 and 8.48 respectively inside a microneedle (Haldkar et al. 2017). An electromagnetically actuated valveless micropump is designed with flow rate of 519.39 μl/min with zero back pressure and actuation frequency of 45 Hz. It is designed using PDMS molding technique (Gidde et al. 2018). A 3D piezoelectrically actuated valveless micropump is designed and numerical analysis is performed. At a frequency of 150 Hz and voltage of 70 V, the flow rate is 24 μl/min and 20 μl/min at 50 V with a maximum back pressure of 225 Pa (Gidde et al. 2019).
In this paper, a detailed analysis on the actuator for drug delivery system is analyzed based on the principle of piezoelectric effect. Single and Bi- diaphragm micropumps based on same principle were designed with flow rate of 1.24 × 10−27 m3/cycle and 1.51 × 10−27 m3/cycle respectively which are simulated at frequencies of 5 Hz, 10 Hz, 15 Hz, 20 Hz and voltages of 5–45 V (Asadi Dereshgi and Yildiz 2019). A polyvinylidene fluoridetrifluoroethylene (PVDF-TrFE) based piezoelectric actuator membrane is fabricated with a thickness of 1 μm and 1.5 μm and diameter of 2250 μm. It resulted in a displacement of 432 μm at a voltage of 9 V (Yildirim et al. 2017). A 3D circular actuator along with a diffuser is analyzed by considering bi laminar plates. It is found that an diffuser at any angle greater than 30° results in lower efficiency. The efficiency can be increased by increasing the dimensions of the diffuser. Also, the thickness of the piezoelectric layer effects the flow rate (Revathi et al. 2018). A comparative study is done on various materials for the piezoelectric actuator at voltage range of 50–150 Hz with maximum deflection 67 μm and minimum deflection of 16 μm. It is observed that maximum deflection of 2000–5000 μm occurred (Tariq et al. 2016). A PZT based micropump is designed at a resonant frequency of 99.61 kHz and voltage of 50 V. It is noted that if the thickness of PZT membrane exceeds 10 μm, the displacement decreases (Hou et al. 2008). A silicon based piezoelectric diaphragm with a n actuation voltage of 60 V is designed with two passive valves. The maximum flow is observed as 1.62 μl/min at a frequency of 10 Hz. The circular chamber is replaced with elliptical one to minimize the dead zones thereby increasing the outflow (Farshchi Yazdi et al. 2019).
The paper is categorized into three sections further. Section 2 discusses the proposed design, explains theoretical parameters and justifies the selection of materials for the piezoelectric actuator concentrating on working principle of the actuator as well as micro-pump. Section 3 concentrated on results obtained by simulating the design in FEM tool. Finally, the paper is concluded with a list of references.
2 Proposed drug delivery system
With the advancement in the micro system technology, MEMS micro-pump have gained recognition not only in industrial products but also in medical field. The micro-pump is a device that operate and control on fluids in micrometer range. This miniature micropump carry the advantage of accurate dosage. Generally, a micropump for the purpose of drug delivery consists of chamber, actuator, diffuser and an array of micro needles as depicted in Fig. 1.

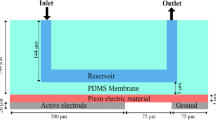
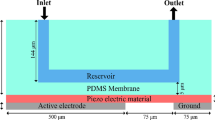
Design of the proposed micropump
The proposed design consists of two chambers in which the drug is maintained. The drug is let into chamber 1 through the inlet and then it is passed to chamber 2 by employing the technique of piezoelectric actuation on the actuator placed on the chambers. The drug is passed into chamber 2 through the diffuser. The functioning of the micropump majorly depends upon the actuator. When the voltage is applied on the piezoelectric actuator which is placed over chamber 1, it undergoes displacement and bends downwards. This creates pressure in the chamber which pushes the drug into chamber 2 through the interconnected diffuser. Similarly, the actuator present on the top of chamber 2 is also fed by voltage which causes deflection in it and makes the drug get into an array of micro needles connected to it. Therefore, the drug gets released into patients’ body through these micro needles in required quantity and also painlessly.
2.1 Proposed piezoelectric actuator
The actuator is the heart of the micropump. The actuation technique used here is piezoelectric actuation technique. There are various actuation techniques for MEMS devices; electrostatic, piezoelectric, optical thermal, magnetic, magnetostrictive and chemical actuation. In piezoelectric actuation, the piezoelectric actuator is displaced electrically. In this, high force can be achieved at lower voltage where as magnetic actuation is a complex process. Thermal actuation is usually used for thermal bimorph actuation which requires more power and also temperature sensitive. Piezo-resistive technique is irreconcilable with the temperature changes of the patients’ body. Of all, piezoelectric actuation is best suitable technique for the bio-medical devices (Amirouche et al. 2009).
The actuator is laid over both the chambers of the proposed system. It consists of a diaphragm and a piezoelectric layer. A thin layer of piezoelectric material is laid over a diaphragm constituting a piezoelectric actuator as shown in Fig. 2.

Schematic of piezoelectric actuator
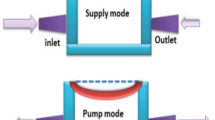
When electric potential is applied over the upper surface of piezoelectric layer, it undergoes deformation which causes the bonded layer of diaphragm to deflect downwards. This generates pressure inside the chamber containing the drug. The developed pressure makes the drug flow from chamber 1 to chamber 2 through the diffuser. Likewise, another piezoelectric actuator is placed over the chamber 2. The application of voltage on which makes the drug to get filled in the array of micro needles connected to it. This marks the efficient delivery of drug into patients’ body (Fig. 3).

Side view of the actuator
The actuator is not only considered in circular shape but also in rectangular shape as shown in Fig. 4. Rectangular actuator is placed over the rectangular chamber while the circular on is placed over the circular chamber.

Rectangular piezoelectric actuator
The thickness of the piezoelectric membrane must be thin for the displacement to be maximum (Mu et al. 1999). The thickness ratio of piezoelectric layer and diaphragm effects the thickness ratio. The thickness ratio must be minimum for the deflection to be maximum. Tables 1 and 2 illustrate the dimensions of the piezoelectric actuator for both circular and rectangular actuators.
2.2 Mathematical equations
The displacement of the piezoelectric actuator consisting of two layers, diaphragm and piezoelectric layer can be estimated theoretically with Eq. 1 (Ardito et al. 2013).
where \( C_{t} = \frac{{S_{11}^{E} \cdot E \cdot [1 - V_{P}^{2} ]}}{{[1 - V_{d}^{2} ]}} \), \( S_{11}^{E} = \) elastic compliance, \( t_{dp} = \frac{{t_{d} }}{{t_{p} }} \), \( t_{p} \) thickness of piezoelectric layer, \( t_{d} \)- thickness of diaphragm, \( u_{p} \) Poisson ratio of piezoelectric layer, \( u_{d} \) Poisson ratio of diaphragm, \( V_{p} \) voltage over piezoelectric layer, \( d_{33} \) piezoelectric charge constant, \( r_{p} \) radius of piezoelectric layer, \( r_{d} \) radius of diaphragm, E Young’s Modulus of diaphragm material.
By applying a strong electric field to piezoelectric material, it pass through their Curie point and the domains get aligned in the direction of applied electric field. This phenomenon is termed as poling. After the removal of applied electric field, the domains retain their original orientation. Elastic compliance is defined as the ratio of strain developed to the applied stress. It is the stress in direction 1 perpendicular to direction in which the element is polarized and accompanying strain in direction 1, under constant electric field. To put simply, it is inverse of Young’s modulus. On application of electric potential to the PZT material, dipole movement occurs through its crystal electric dipoles which leads to deformation crystals. This is converse piezoelectric effect given in Eq. 2. Figure 5 depicts the principle of converse piezo-electric effect.
where D electric displacement vector, T the stress vector, sE matrix of elastic coefficients at constant electric field strength, S strain vector, εT dielectric matrix at constant mechanical strain, E electric field vector, d direct or converse piezoelectric effect.

Diagrammatic representation of converse piezoelectric effect
The applied electric field generates different amount of stress on the piezoelectric material. Electromechanical coupling coefficient infers to the electrical and mechanical characteristics in the direction of applied voltage. The piezoelectric coefficient \( d_{33} \) represents the actuation term d. It indicates the stress in third direction, former ‘3’ represents the axis 3 and the latter ‘3’ infers to the piezoelectric constant. The principle of converse piezoelectric effect is utilized in actuators, needle drivers in printers, motors, miniaturized motors, bimorph actuators and in injection systems.
2.3 Material selection
The selection of material for the actuator plays crucial role in enabling the piezo-electric actuation (Davis 2000). Usually, PZT (lead zirconate titanate) material is used for causing deformation in the actuators. When PZT materials are exposed to voltage, it undergoes change in physical structure like lengthening or shortening depending on the polarity. Piezo-electric effect is encountered when voltage is applied to this material. The main component of PZT material is lead which is detrimental properties that are absolutely hazardous. The Directive 2002/95/EC of European Union, also known as Restriction of Hazardous Substances, RoHS has restricted the use of lead content materials for its harmfulness. PZT material contains lead up to 60% which is toxic and not suitable for medical applications. Despite its excellent properties like high dielectric constant, high Young’s modulus and low poisson ratio which are significant for the piezoelectric actuation, this is not compatible for drug delivery systems (Ringgaard and Wurlitzer 2005; Takenaka and Nagata 2005; Yi et al. 2005; Shimamura et al. 1996). Therefore, there is utter necessity for looking for an alternative to PZT material for utilizing in actuators, sensors, biomedical devices. Barium titanate, Lithium niobate, Polyvinylidene fluoride, KNN based ceramics are favourable materials for lead free harmless piezoelectric materials (Tashiro et al. 2002; Hollenstein et al. 2005; Matsubara et al. 2005). Table 3 illustrates the properties of piezoelectric and alternative ceramics.
As Barium titanate posses higher dielectric constant and piezoelectric charge constant compare to other ceramics apart from PZT material. Therefore, barium titanate is considered for piezoelectric layer of actuator. For the diaphragm of the actuator, PDMS (polydimethylsiloxane) material is considered. PDMS is a polymer generally used in microfluidic devices. It is also simple in the fabrication processes of Microfluidic devices for its qualities like biocompatibility, non-poisonous, non-inflammability, chemical inertness, optical transperance. It is suitable for various drugs, organic solvents. The major advantage of PDMS is its capability to be bonded with other materials and non toxicity to cells (Sia and Whitesides 2003; Jiang et al. 2014; McDonald et al. 2000).
3 Results and discussion
3.1 Modal frequency analysis
Modal frequency analysis is necessary for reviewing the limits of response of any device. For instance, it analyses the maximum and minimum displacement, nature of deformation for a given input voltage. These frequencies determine the stiffness of the material. This is also called as the natural frequency provided by the eigen vectors. Therefore, this can also be termed as eigen frequency analysis.
This is performed in COMSOL MULTYPHYSICS tool and is found there are six modes of frequencies. Both the circular and rectangular piezoelectric actuators are analyzed in terms of stress in the given modes of frequencies. The actuators undergo uniform displacement only at certain frequency. In all other modes of frequencies, though there is deformation, it is not proper. At one eigen frequency, a range of voltages are given to observe the uniform deflection. The consistent and unwavering deflection is observed only at a particular frequency. This certain frequency is termed as the natural frequency of the piezoelectric actuator. At this point of frequency, the actuator is applied with range of voltages to observe the maximum voltage it can take up at its natural frequency while undergoing unwavering and uniform deflection.
The modal frequency analysis is carried out for both the circular and rectangular piezoelectric actuators. It is found that both the actuators have undergone uniform deflection at first modal frequency and at thinner piezoelectric layer of the actuator. The circular actuator with thickness of 0.1 μm, 0.2 μm, 0.3 μm, 0.4 μm have undergone even deflections at frequencies of 60 Hz, 82 Hz, 92 Hz and 102 Hz respectively. Similarly, the natural frequencies of rectangular actuator are 5 Hz, 11 Hz, 8.6 Hz and 8.3 Hz for the thicknesses of 0.6 μm, 0.8 μm, 1.0 μm and 1.2 μm. This is summarized in Table 4. Figures 6 and 7 illustrate the modal frequencies with uniform and non uniform deflections for the actuators.

Modal frequency analysis of the circular actuator. a 60 Hz. b 85 Hz. c 72 Hz. d 98 Hz. e 81 Hz. f 111 Hz

Modal frequency analysis of the rectangular actuator. a 5 Hz. b 30 Hz. c 12 Hz. d 34 Hz. e 25 Hz. f 45 Hz
3.2 MSF: element of reliability
Whenever a device is designed, prior to its fabrication, it is essential to check the reliability of the device. This can be authenticated by analyzing the minimum safety factor of the actuators. It is defined as the ratio of strength of the material and the maximum stress in the part.
Stress is a value that measure the inner pressure inside a solid which is cause by an external loading. If stress is too high inside a part, the part may fail. The strength of a material is its ability to withstand an applied load without failure or plastic deformation. The field of strength of materials deals with forces and deformations that result from their acting on a material. When the stress in the model remains much inferior to the strength of the material, the safety factor stays superior to 1 and the model is safe. If the safety factor is way superior to 1 everywhere then this indicates that certain part is over-engineered. Table 5 gives the maximum strength for safety factor of one along with corresponding piezoelectric thickness.
Through the modal frequency analysis, the maximum stress is noted. The strength of the actuators is noted at every voltage. The voltage at which the ratio of strength and maximum stress equals to one, this voltage is its threshold voltage beyond which the actuators can no more take up higher voltage and do not undergo deflection. To put simply, the actuators reaches breakdown condition. The actuators undergo even deflection below the threshold voltage and it is the working region of the actuators. A graph is drawn to depict the working and breakdown region of the actuators. Figures 8 and 9 showcase the stress analysis and the safety factor for the circular and rectangular actuators. The maximum stress is marked as 596 GPa for circular actuator and 3.91 GPa for rectangular actuator. The minimum stress a circular actuator can take up is 0.40 GPa at a thickness of 0.4 μm whereas for rectangular actuator is 0.50 GPa at a thickness of 1.2 μm. This states that the actuators are capable of taking such high voltages and can withstand stress.

Stress analysis of circular actuator various thicknesses and corresponding graphical representation of MSF = 1. a 0.1 μm. c 0.3 μm. b 0.2 μm. d 0.4 μm

Stress analysis of rectangular actuator various thicknesses and corresponding graphical representation of MSF = 1. a 0.6 μm. c 1.0 μm. b 0.8 μm. d 1.2 μm
3.3 Deflection analysis
The actuator consists of two layers. A diaphragm on which a thin layer of piezoelectric layer is bonded. The thickness of the diaphragm is maintained as 20 μm and the piezoelectric layer is varied from 0.1 to 0.4 μm with an interval of 0.1 μm for circular actuator. In case of rectangular actuator, the thickness of diaphragm is fixed to 50 μm and piezoelectric layer is varied from 0.6 to 1.2 μm with an interval of 0.2 μm. It is observed that, thinner is the piezoelectric layer, higher is the deflection. Table 6 shows the maximum displacement at various thicknesses of the piezoelectric layer for both the actuators. PDMS is chosen for the diaphragm for its property of getting bonded easily and Barium titanate for piezoelectric layer for its biocompatibility. Figure 10 shows the uniform deflection in circular and rectangular actuators. The circular actuator with thickness 0.1 μm can take up a maximum voltage of 8500 V and with thicknesses of 0.2 μm, 0.3 μm and 0.4 μm, the maximum voltage of 5220 V, 3150 V and 2320 V respectively. For the rectangular actuator, maximum voltages of 340 V, 265 V, 260 V and 86 V is noted at thicknesses of 0.6 μm, 0.8 μm, 1.0 μm and 1.2 μm. The maximum displacement of 2950 μm for the circular actuator is found at a piezoelectric thickness of 0.1 μm and for rectangular actuator is 1080 μm at a thickness of 0.6 μm. This is observed when minimum safety factor is one. Figures 11 and 12 gives the graphical representation of voltage versus displacement and it is observed that the deflection increased with decrease in the thickness of the piezoelectric layer.

Uniform deflections. a Circular actuator at 0.1 μm thickness. b Circular actuator at 0.2 μm thickness. c Rectangular actuator at 0.6 μm thickness. d Rectangular actuator at 0.8 μm thickness

Displacement analysis of circular actuator by varying input voltage for different thicknesses of piezoelectric layer

Displacement analysis of rectangular actuator by varying input voltage for different thicknesses of piezoelectric layer
4 Conclusion
In this paper, a biocompatible piezoelectric actuator which is an essential component of micropump is designed and analyzed for drug delivery systems. The actuator is considered in both circular and rectangular shapes. The thicknesses of the piezoelectric layer are varied to observe the even deflections. The maximum deflection of 2950 μm and 1080 μm is noted at a thickness of 0.1 μm and 0.6 μm for circular and rectangular actuator respectively. Further, the modal frequency analysis is performed to determine the natural frequency of the actuators at various thicknesses to analyze the maximum stress it can take up. This is done to estimate the reliability of the actuator before it can be proceeded for fabrication process. All the analysis is carried out based on minimum safety factor and when it less than and equal to one, the actuator is reliable piezoelectrically and mechanically. Beyond this, the actuator comes to breakdown condition. It can be said that the circular piezoelectric actuator shows excellent performance compared to rectangular one as it can undergo maximum displacement and capable of bearing a maximum voltage of 8500 V at first modal frequency when minimum safety factor is one. This actuator can be utilized in micropump for the easy delivery of drug into patients’ body.
References
Amirouche F, Zhou Y, Johnson T (2009) Current micropump technologies and their biomedical applications. Microsyst Technol. https://doi.org/10.1007/s00542-009-0804-7
Ardito R, Bertarelli E, Corigliano A, Gafforelli G (2013) On the application of piezolaminated composites to diaphragm micropumps. Compos Struct 99:231–240. https://doi.org/10.1016/j.compstruct.2012.11.041
Asadi Dereshgi H, Yildiz MZ (2019) Numerical study of novel MEMS-based valveless piezoelectric micropumps in the range of low voltages and frequencies. 2019 scientific meeting on electrical-electronics & biomedical engineering and computer science (EBBT). https://doi.org/10.1109/ebbt.2019.8741629
Cobo A, Sheybani R, Meng E (2015) MEMS: enabled drug delivery systems. Adv Healthc Mater 4(7):969–982. https://doi.org/10.1002/adhm.201400772
Cui Q, Liu C, Zha XF (2005) Simulation and optimization of a piezoelectric micropump for medical applications. Int J Adv Manuf Technol 36(5–6):516–524
Davis SS (2000) Drug deliver systems. Interdisc Sci Rev 25(3):175–183. https://doi.org/10.1179/030801800679206
Desai TA, Chu WH, Tu JK, Beattie GM, Hayek A, Ferrari M (1998) Microfabricated immunoisolating biocapsules. Biotechnol Bioeng 57(1):118–120. https://doi.org/10.1002/(sici)1097-0290(19980105)57:1%3c118:aid-bit14%3e3.0.co;2-g
Dhananchezhiyana P, Hiremath Somashekhar S (2016) Optimization of multiple micro pumps to maximize the flow rate and minimize the flow pulsation. Procedia Technol 25(2016):1226–1233
Farshchi Yazdi SAF, Corigliano A, Ardito R (2019) 3-D design and simulation of a piezoelectric micropump. Micromachines (Basel) 10(4):259. https://doi.org/10.3390/mi10040259
Gensler H, Sheybani R, Li P-Y, Lo R, Zhu S, Yong K-T, Roy I, Prasad PN, Masood R, Sinha UK, Meng E (2010) IEEE 23rd international conference on micro electro mechanical systems (MEMS). IEEE, New York, p 23
Gidde RR, Pawar PM, Ronge BP, Dhamgaye VP (2018) Design optimization of an electromagnetic actuation based valveless micropump for drug delivery application. Microsyst Technol. https://doi.org/10.1007/s00542-018-3987-y(01234
Gidde RR, Pawar PM, Dhamgaye VP (2019) Fully coupled modeling and design of a piezoelectric actuation based valveless micropump for drug delivery application. Microsyst Technol. https://doi.org/10.1007/s00542-019-04535-8
Haldkar RK, Gupta VK, Sheorey T (2017) Modeling and flow analysis of piezoelectric based micropump with various shapes of microneedle. J Mech Sci Technol 31(6):2933–2941
Herrlich S, Spieth S, Messner S, Zengerle R (2012) Osmotic micropumps for drug delivery. Adv Drug Deliv Rev 64(14):1617–1627. https://doi.org/10.1016/j.addr.2012.02.003
Hollenstein E, Davis M, Damjanovic D, Setter N (2005) Piezoelectric properties of Li- and Ta-modified (Na0.5K0.5) NbO3 ceramics. Appl Phys Lett 87(18):182905–182907. https://doi.org/10.1063/1.2123387
Hou W, Das B, Jiang Y, Qian S, Zheng X, Pi X, Yang J, Liu H, Zheng J, Zheng Z (2008) Simulation of the diaphragm properties of A PZT-based valveless micropump. ISBN: 978-1-4244-1907-4 CD: 978-1-4244-1908-1 INSPEC Accession Number: 9964067. https://doi.org/10.1109/nems.2008.4484369
Jiang Y, Wang H, Li S, Wen W (2014) Application of micro/nanoparticles in microfluidic sensors: a review. Sensors 14:6952–6964
Junwu K, Zhigang Y, Taijiang P, Guangming C, Boda W (2005) Design and test of a high-performance piezoelectric micropump for drug delivery. Sens Actuators A 121(2005):156–161
Karman S, Ibrahim F, Soin N (2007) A review of MEMS drug delivery in medical application. In: 3rd Kuala Lumpur international conference on biomedical engineering, pp 312–315
Lerner EI, Flashner-Barak M, Achthovem EV, Keegstra H, Smit R (2005) Delayed release formulations of 6-mercaptopurine. WO Patent 2005099666
Matsubara M, Yamaguchi T, Kikuta K, Hirano S (2005) Effect of Li substitution on the piezoelectric properties of potassium sodium niobate ceramics. Jpn J Appl Phys 44(8):6136–6142. https://doi.org/10.1143/JJAP.44.6136
McDonald JC, Duffy DC, Anderson JR, Chiu DT, Wu H, Schueller OJ, Whitesides GM (2000) Fabrication of microfluidic systems in poly(dimethylsiloxane). Electrophoresis 21:27–40
Mu YH, Hung NP, Ngoi KA (1999) Optimisation design of a piezoelectric micropump. Int J Adv Manuf Technol 15:573–576
Prakash A, Markham A (1999) Oral delayed-release mesalazine: a review of its use in ulcerative colitis and Crohn’s disease. Drugs 57(3):383–408
Revathi S, Padmapriya N, Padmanabhan R (2018) A design analysis of piezoelectric-polymer composite-based valveless micropump. Int J Model Simul. https://doi.org/10.1080/02286203.2018.1482521
Ringgaard E, Wurlitzer T (2005) Lead-free piezoceramics based on alkali niobates. J Eur Ceram Soc 25:2701
Sharma SK, Ruggenenti P, Remuzzi G (2007) Managing hypertension in diabetic patients—focus on trandolapril/verapamil combination. Vasc Health Risk Manag 3(4):453–465
Shimamura K, Takeda H, Kohno T, Fakuda T (1996) Growth and characterization of lanthanum gallium silicate La3Ga5SiO14 single crystals for piezoelectric applications. J Cryst Growth 163:388
Sia SK, Whitesides GM (2003) Microfluidic devices fabricated in poly(dimethylsiloxane) for biological studies. Electrophoresis 24(21):3563–3576. https://doi.org/10.1002/elps.200305584
Takenaka T, Nagata H (2005) Current status and prospects of lead-free piezoelectric ceramics. J Eur Ceram Soc 25:2693
Tao SL, Desai TA (2003) Microfabricated drug delivery systems: from particles to pores. Adv Drug Deliv Rev 55:315
Tariq N, Tayyaba S, Ashraf MW, Sarwar G, Wasim MF (2016) Comparative simulation of silicon, PDMS, PGA and PMMA actuator for piezoelectric micropump, INSPEC Accession Number: 16556469. https://doi.org/10.1109/icrai.2016.7791241
Tashiro S, Nagamatsu H, Nagata K (2002) Sinterability and piezoelectric properties of KNbO3 ceramics after substituting Pb and Na for K. Jpn J Appl Phys 4(11B):7113–7118. https://doi.org/10.1143/JJAP.41.7113
Yi L, Moon K, Wong CP (2005) Electronics without lead. Science 308:1419
Yildirim YA, Toprak A, Tigli O (2017) Piezoelectric membrane actuators for micropump applications using PVDF-TrFE. Microelectromech Syst 27(1):86–94
Acknowledgements
This document is prepared with the support of NMDC, Department of ECE, NIT Silchar for providing necessary FEM tools.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Srinivasa Rao, K., Hamza, M., Ashok Kumar, P. et al. Design and optimization of MEMS based piezoelectric actuator for drug delivery systems. Microsyst Technol 26, 1671–1679 (2020). https://doi.org/10.1007/s00542-019-04712-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-019-04712-9