
Abstract
The learning advantages of self-controlled knowledge-of-results (KR) schedules compared to yoked schedules have been linked to the optimization of the informational value of the KR received for the enhancement of one’s error-detection capabilities. This suggests that information-processing activities that occur after motor execution, but prior to receiving KR (i.e., the KR-delay interval) may underlie self-controlled KR learning advantages. The present experiment investigated whether self-controlled KR learning benefits would be eliminated if an interpolated activity was performed during the KR-delay interval. Participants practiced a waveform matching task that required two rapid elbow extension-flexion reversals in one of four groups using a factorial combination of choice (self-controlled, yoked) and KR-delay interval (empty, interpolated). The waveform had specific spatial and temporal constraints, and an overall movement time goal. The results indicated that the self-controlled + empty group had superior retention and transfer scores compared to all other groups. Moreover, the self-controlled + interpolated and yoked + interpolated groups did not differ significantly in retention and transfer; thus, the interpolated activity eliminated the typically found learning benefits of self-controlled KR. No significant differences were found between the two yoked groups. We suggest the interpolated activity interfered with information-processing activities specific to self-controlled KR conditions that occur during the KR-delay interval and that these activities are vital for reaping the associated learning benefits. These findings add to the growing evidence that challenge the motivational account of self-controlled KR learning advantages and instead highlights informational factors associated with the KR-delay interval as an important variable for motor learning under self-controlled KR schedules.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
Extrinsic feedback provided to learners that indicates their success in achieving the task goal is termed knowledge-of-results (Schmidt & Young, 1991). In the motor learning literature, it is well established that self-controlled KR conditions, operationally defined as permitting the learner control over KR delivery during practice, are more effective for skill retention and transfer compared to conditions wherein the same KR schedule is imposed (i.e., yoked) on the learner without any choice (see Sanli, Patterson, Bray, & Lee, 2013 for a review). As noted by Sanli et al., there are two perspectives forwarded for such findings. On the one hand, these learning advantages have been explained from a motivation-based perspective wherein exercising choice is considered the driving mechanism because having choice is intrinsically rewarding and supports a basic psychological need for autonomy (Chiviacowsky, 2014; Lewthwaite, Chiviacowsky, Drews, & Wulf, 2015; Lewthwaite & Wulf, 2010; Sanli et al., 2013). On the other hand, an information-processing explanation has been adopted by some researchers who suggest that the opportunity to base the KR decision on one’s subjective evaluation of the recently executed motor action (i.e., error estimation) is a critical factor (Carter, Carlsen, & Ste-Marie, 2014; Chiviacowsky & Wulf, 2005). Chiviacowsky and Wulf (2005) proposed the importance of error estimation after discovering that the learning advantages of self-controlled KR schedules depended on the timing of the KR decision. Specifically, completing this decision after motor execution was more beneficial for learning a sequential timing task than completing the same decision before motor execution. Such a finding conflicts with the motivation-based explanation as no learning differences between these groups should have been found because both groups had the opportunity to exercise choice over KR delivery.
Carter et al. (2014) recently corroborated and extended the findings of Chiviacowsky and Wulf (2005). In their experiment, Carter and colleagues used the two self-controlled groups that differed based on the timing of their KR decision (self-before, self-after) and also added a novel self-controlled group that made an initial decision before a trial, but could then change or stay with their original choice after the trial (self-both). Corresponding no-choice yoked groups for each self-controlled group were included, which addressed a methodological limitation in Chiviacowsky and Wulf’s (2005) experiment. The task used required participants to learn the correct amount of force to exert to propel a slider down a rail to an exact distance in the absence of vision. The results revealed superior learning and performance appraisal (i.e., error estimation) abilities in the self-after and self-both groups compared to their yoked groups, as well as the self-before group. The self-before group did not significantly outperform their yoked counterparts in retention or transfer. In other words, exercising choice over KR delivery before a trial afforded no learning advantage compared to the no-choice yoked-before group that was instead told prior to a trial whether KR would or would not be provided. given that the self-after and the Self-Both groups did not differ significantly from one another in retention and transfer, or their performance appraisal abilities, Carter and colleagues attributed their enhanced learning to the opportunity to exercise choice regarding KR delivery after a trial (i.e., the common factor between them). It was presumed that the choice after a motor response allowed learners to determine whether receiving KR would be useful based on a subjective performance evaluation of that trial.Footnote 1
Based on their learning and performance appraisal data, Carter et al. (2014) linked the learning advantages of self-controlled KR schedules to the optimization of the informational value of the KR received for the development of one’s error-detection capabilities. This perspective highlights the information-processing activities that encode a motor memory during practice (Kantak & Winstein, 2012), with an emphasis on those processing activities engaged during the KR-delay interval. The KR-delay interval refers to the period of time between the completion of a motor response and the presentation of KR for that trial (Schmidt & Lee, 2011). With respect to the self-controlled KR research, the KR-delay interval culminates in the KR decision. During the KR-delay interval the learner is thought to be actively processing response-produced feedback, which can refer to proprioceptive, visual, auditory, and/or haptic information (Adams, 1968; Salmoni, Schmidt, & Walter, 1984; Schmidt & Lee, 2011; Swinnen, 1988). Simply put, response-produced feedback encompasses any movement-related sensory information that is naturally available in a performance instance, and is therefore highly task-dependent. As such, the KR-delay interval is when the sensory consequences of a movement are processed in working memory so the learner can engage in additional comparative and evaluative processes if KR is provided (Schmidt & Lee, 2011). As support for this assertion, it has been demonstrated that motor learning is hindered if the KR-delay interval is filled with an interpolated activity (e.g., Marteniuk, 1986; Swinnen, 1990) or is eliminated altogether by providing instantaneous KR (e.g., Swinnen, Nicholson, Schmidt, & Shapiro, 1990). Both of these manipulations are thought to affect a learner’s ability to interpret response-produced feedback, albeit for slightly different reasons. For instantaneous KR, it is thought that the immediacy of the KR allots learners no time (or not enough time) to learn to use response-produced feedback to evaluate performance; thus, he or she becomes dependent on using KR to evaluate response outcomes (Swinnen et al., 1990). More relevant to the present study, an interpolated activity is hypothesized to cause structural interference with the normal processing of response-produced feedback upon movement completion as similar high-level learning processes are required by both activities (Swinnen, 1990; Marteniuk, 1986). Therefore, if Carter and colleagues’ (2014) assertion that the learning benefits of self-controlled KR schedules are driven, at least in part, by the optimization of the informational value of the KR as a result of processes engaged during the KR-delay interval, then having learners engage in an interpolated activity during this period would be expected to interfere with these information-processing activities, and thwart the typical self-controlled learning advantages.
The purpose of the present experiment was to test this hypothesis. Thus, two self-controlled KR groups were compared: one that experienced the traditional empty KR-delay interval and one that was required to perform a number-solving task during this interval. A corresponding yoked group was included for both self-controlled groups. If the information-processing activities occurring in the KR-delay interval are not critical for self-controlled KR learning advantages, then learning differences should not be found between the two self-controlled groups, but both should demonstrate superior learning compared to their yoked counterparts. Alternatively, if self-controlled KR learning benefits depend on these information-processing activities then the interpolated activity should eliminate the typical learning advantages of self-controlled KR schedules, and self-controlled learning benefits should only be obtained for the group which did not engage in the interpolated activity. We expected the latter of these two possibilities.
Methods
Participants and experimental groups
Data were collected from 44 right-handed (Oldfield, 1971) participants with no sensory or motor dysfunctions. Four experimental groups of equal-size were created using a factorial combination of choice (self, yoked) and KR-delay interval (empty, interpolated): self-controlled + empty (M age = 22.27, SD = 2.28 years; 6 M, 5 F), self-controlled + interpolated (M age = 22.09, SD = 2.30 years; 6 M, 5 F), yoked + empty (M age = 22.23, SD = 2.94 years; 7 M, 4 F), and yoked + interpolated (M age = 22.23, SD = 2.94 years; 5 M, 6 F). The first 22 participants were randomly assigned to one of the two self-controlled groups while the last 22 participants were randomly assigned to one of the two yoked groups. This assignment procedure is typical in self-controlled KR experiments as the KR schedules of the self-controlled participants are imposed on yoked participants and therefore must be collected first.
Task and apparatus
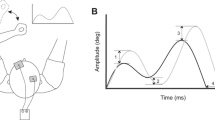
The task goal was to use elbow extension-flexion movements (two reversals with specific spatial–temporal constraints) with the non-dominant (left) arm to replicate a target waveform as accurately as possible (see Fig. 1). The target waveform was created by summing two sine waves: \(y\left( t \right) = 42\sin \left( {\pi t - .3} \right) + 23\sin \left( {3\pi t + .4} \right)\). The overall movement time goal was 900 ms during the practice and retention phases. The same waveform was used for the transfer test with the exception that the overall goal movement time was 1150 ms. This waveform task was taken from Goh et al. (2012) and variations of this waveform task have been widely used in the motor learning literature; thus, the task setup and procedures are well-established (e.g., Kovacs, Boyle, Grutmatcher, & Shea, 2010; Kantak, Sullivan, Fisher, Knowlton, & Winstein, 2010; Wulf, Schmidt, & Deubel, 1993; Goh, Sullivan, Gordon, Wulf, & Winstein, 2012; Lin, Fisher, Winstein, Wu, & Gordon, 2008).

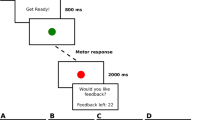
Schematic of the temporal events in a typical practice trial for the self-controlled + empty (a) and the self-controlled + interpolated (b) groups. For the respective yoked groups, the only difference in the sequence of events is that the “do you want feedback?” Screen was not displayed to the participants
Participants sat in a chair facing a 22-inch computer monitor with their left forearm resting semiprone in a padded armrest attached to the top of the manipulandum. The manipulandum was affixed to an axis that restricted movement to the horizontal plane. Their elbow was bent at approximately 90° in front of their abdomen and their hand grasped a handle that could be adjusted to ensure the central axis of rotation was about the elbow joint. Vision of the arm was occluded using a felt sheet attached to two wooden levers. A linear potentiometer powered by a 5 V direct current power supply attached to the central axis of the manipulandum provided position data which was sampled at 1 kHz for the duration of each movement using analog-to-digital hardware (PCIe-6321, National Instruments Inc.). A customized LabVIEW (National Instruments Inc.) program controlled the timing of all experimental stimuli on each trial, and recorded and stored the data for offline analysis.
Procedure
Prior to the data collection period, all participants had a series of instructions read to them as they followed along on the computer monitor positioned in front of them. In these instructions, all participants were informed of (1) the task and its associated overall movement time goal of 900 ms (no details about the amplitude goals were provided), (2) the manner in which the KR display screen would provide feedback, and (3) how to interpret the KR display. The instructions also explained how KR would be scheduled based on their respective experimental group. Specifically, the self-controlled groups were informed they would get to decide when they wanted KR, but with the restrictions of three requests per block and that all three had to be used. This ensured any learning differences between the groups could not be attributed to discrepancies in the relative frequency of KR. The yoked groups were informed that they would receive KR three times in each block according to a predetermined schedule. The two interpolated groups were also informed that upon movement completion they would be required to perform a number-solving task that required identifying a two-digit number through trial-and-error (e.g., Marteniuk, 1986). Each guess was followed by verbal feedback informing the participant whether each individual digit of their guess was low, high, or good relative to the target number. For example, if a participant guessed “72” and the target number was “38”, the verbal feedback would be “high-low”. Thus, on the subsequent guess, the participant would need to guess a number whose first digit was lower than “7” and whose second digit was higher than “2”. Participants were allowed to make as many guesses as possible within the allotted time but always had to wait until feedback regarding the guess was provided before making a new guess. Once a target number was correctly identified, a new two-digit number had to be discovered. Participants were encouraged to uncover as many numbers as possible during practice and the order of the target numbers was constant across participants.
An overview of a typical trial is displayed in Fig. 1. Each trial began with an image of the target waveform displayed (2 s), followed by a visual “get ready” and an auditory “go” signal (1 s apart). Because we were not interested in reaction time, participants were allowed to start their movement when ready following the “go” signal. The computer screen remained blank throughout the participants’ ongoing movement which results in a more open-loop mode of control (e.g., Kovacs et al., 2010; Leinen, Shea, & Panzer, 2015; Panzer, Krueger, Muehlbauer, Kovacs, & Shea, 2009). Upon movement completion, there was a 5 s interval (i.e., KR-delay interval) that was either empty or filled with the interpolated activity. The interpolated activity only occurred in the practice phase (in retention and transfer, this 5 s interval was empty for all groups). Following this, the KR decision prompt was provided to the self-controlled groups. When KR was provided, it was displayed for 5 s and consisted of a graphic representation of the participant’s movement superimposed on the criterion waveform. On no-KR trials a black screen was displayed for 5 s. As the duration of these events in a typical trial were fixed, the duration of the practice phase was similar between the four groups. The practice phase consisted of six blocks of ten trials. The retention and transfer tests each consisted of one block of ten no-KR trials and were performed approximately 24-h after practice.
Data reduction and analysis
Overall performance accuracy in achieving the target waveform was measured using root mean square error (RMSE). RMSE is the mean difference between the target waveform and the participant’s trajectory calculated over the participant’s actual movement time, and was calculated after synchronizing the onset of the target waveform with the participant’s response (Lin, Winstein, Fisher, & Wu, 2010). There are two main advantages of using RMSE: first, it is sensitive to both spatial and temporal errors in the produced motor response relative to the target trajectory, and second, it incorporates both variability and bias of the performed motor response (Kovacs et al., 2010; Schmidt & Lee, 2011). RMSE was calculated by the difference between the target waveform and the participant’s response at each data point in the time series. The differences for each data point in the time series were then squared and the mean of the squared differences computed on a trial basis. Lastly, the square root of the mean was computed for the final measure of RMSE (consistent with Kovacs et al., 2010; Leinen et al., 2015; Lin et al., 2008). Values of RMSE for individual trials were averaged to generate an overall RMSE score for each block of ten trials. Differences with a probability of ≤.05 were considered significant. Partial eta squared (\(\eta_{\text{p}}^{2}\)) is reported as an estimate of effect size and post hoc analyses were performed using Tukey’s HSD and/or Holm–Bonferonni procedures. In cases where sphericity was violated, Greenhouse–Geisser adjusted p values are reported.
Results
Practice
Mean RMSE for each block were analyzed in a 2 (choice: self, yoked) × 2 (KR-delay: empty, interpolated) × 6 (block) mixed-model analysis of variance (ANOVA) with repeated measures on block. Mean RMSE decreased across practice blocks for all groups (Fig. 2, left). The significant main effects for KR-delay [F(1, 40) = 5.730, p = .021, \(\eta_{\text{p}}^{2}\) = .125] and block [F(5, 200) = 17.778, p < .001, \(\eta_{\text{p}}^{2}\) = .308] were superseded by a significant block × KR-delay interaction, F(5, 200) = 5.343, p = .003, \(\eta_{\text{p}}^{2}\) = .118. Post-hoc analyses revealed that an empty KR-delay interval resulted in greater accuracy in blocks 3–5 compared to an interpolated KR-delay. The main effect for choice was also significant, F(1, 40) = 5.730, p = .021, \(\eta_{\text{p}}^{2}\) = .125, with the self-controlled groups having lower RMSE than the yoked groups. The interactions between choice and KR-delay [F(1, 40) = 1.935, p = .172], choice and block [F(5, 200) = .157, p = .978], and choice, KR-delay, and block [F(5, 200) = .901, p = .482] were not significant.

Mean RMSE (degrees) for the practice phase (B1–B6) and the 24 h retention (B7) and transfer (B8) tests. Each block consisted of ten trials and KR was only available for blocks 1–6
Retention and transfer
Mean RMSE for retention and transfer were analyzed in separate 2 (choice) × 2 (KR-delay) two-way ANOVAs. For retention, there was a significant main effect of KR-delay, F(1, 40) = 8.249, p = .006, \(\eta_{\text{p}}^{2}\) = .171; however, it was superseded by a significant interaction between choice and KR-delay, F(1, 40) = 5.795, p = .021, \(\eta_{\text{p}}^{2}\) = .127. Post-hoc analyses revealed the self-controlled + empty group was significantly more accurate than the self-controlled + interpolated, yoked + interpolated, and yoked + empty groups, who did not differ significantly from each other (Fig. 2, middle). The main effect of choice was not significant, F(1, 40) = 1.929, p = .172.
In transfer, there was also a significant main effect of KR-delay, F(1, 40) = 8.885, p = .005, \(\eta_{\text{p}}^{2}\) = .182, which was superseded by a significant choice × KR-delay interaction, F(1, 40) = 4.689, p = .036, \(\eta_{\text{p}}^{2}\) = .105. Similar to the retention test, post hoc analyses revealed that the self-controlled + empty group was significantly more accurate than the self-controlled + interpolated, yoked + interpolated, and yoked + empty groups, who did not differ significantly from each other (Fig. 2, right). The main effect of choice was not significant, F(1, 40) = 2.465, p = .124.
Discussion
In the present experiment, we tested Carter and colleagues’ (2014) suggestion that information-processing activities during the KR-delay interval, that presumably determine whether receiving KR would resolve any discrepancies between estimated and actual error, is a mechanism underlying self-controlled KR learning advantages. Based on past research, we introduced an interpolated activity during the KR-delay interval (e.g., Marteniuk, 1986; Swinnen, 1990, 1988) to manipulate the learner’s ability to engage in these proposed information-processing activities. Here we show that the typical self-controlled KR learning advantages (see Sanli et al., 2013 for a review) were only found for the self-controlled + empty group relative to their yoked + empty counterparts while the self-controlled + interpolated group did not differ significantly from the yoked + interpolated group. Importantly, the similar retention and transfer performance between the self-controlled + interpolated and the yoked + interpolated groups was not merely the result of the interpolated activity making their performance worse as both groups were not significantly different than the yoked + empty group in retention and transfer (Fig. 2). Based on these combined data, we suggest that the interpolated activity interfered with key information-processing activities occurring in the KR-delay interval that are not only inherent to self-controlled KR conditions, but appear to be fundamental for gaining the typically observed learning advantages.
The question to be answered is what key information-processing activities were disrupted during the KR-delay interval? Although the KR-delay interval was viewed originally as an unimportant learning variable (e.g., Salmoni et al., 1984), it has since been reconceptualized as the hub for error-detection/estimation processes (e.g., Swinnen, 1990, 1988, 1996; Swinnen et al., 1990). Theoretical and computational accounts of motor control and learning provide some insight regarding the mechanisms of these error-based processing activities (e.g., Adams, 1968, 1971; Schmidt, 1975a, b; Shadmehr & Krakauer, 2008; Wolpert, Miall, & Kawato, 1998; Wolpert, Diedrichsen, & Flanagan, 2011). According to Schmidt (1975b), these activities were subserved by the recognition schema which was thought to generate anticipated sensory consequences of the intended (i.e., planned) motor response. To determine the success of the executed motor response, the learner was hypothesized to compare the anticipated and actual sensory consequences and any perceived discrepancies between them could be confirmed and/or resolved with the provision of KR (Schmidt, 1975b). Such a mechanism resonates with forward models of motor control (Miall & Wolpert, 1996; Wolpert et al., 1998; Shadmehr, Smith, & Krakauer, 2010; Lee, Wulf, Winstein, & Zelaznik, 2016) wherein the forward model creates a predictive sensory signal based on an efference copy of the motor commands for a planned response (akin to that of the recognition schema). This predictive signal is then said to be used in comparative processing activities in which the actual movement-related sensory information is used to update movements either online or on a subsequent trial should discrepancies be noted.
In the context of self-controlled KR schedules, we suggest it is the result of this comparison between predicted and actual sensory signals that determines whether the learner decides to request KR for a given trial. Support for this notion comes from questionnaire data which have revealed that participants ask for KR in a performance-dependent manner. For example, participants have reported requesting KR after “perceived good trials” (Chiviacowsky & Wulf, 2002; Patterson & Carter, 2010), after “perceived good and poor trials” (Aiken, Fairbrother, & Post, 2012; Patterson, Carter, & Sanli, 2011; Carter & Patterson, 2012), and “to connect performance and technique” (Laughlin, Fairbrother, Wrisberg, Alami, Fisher, & Huck, 2015). Moreover, participants do not simply use a single KR strategy (Laughlin et al., 2015) and strategy use changes between the first and second halves of practice (Carter & Patterson, 2012; Carter, Rathwell, & Ste-Marie, 2015). These diverse strategies reveal that participants do not aimlessly request KR and instead are actively estimating their performance based on movement-related sensory information to determine whether KR is needed or not. Chiviacowsky and Wulf (2005) were the first to emphasize the importance of error-estimation processes for the learning benefits of self-controlled KR schedules; however, this was only assumed as their design did not include a measure of error-detection capabilities. Carter and Patterson (2012) provided preliminary support for this error-detection hypothesis as they found performance appraisals on a no-KR retention test were more accurate in a younger adult self-controlled group compared to their yoked counterparts (see Carter et al., 2014 for additional support). Given these findings, it seems plausible that practicing with a self-controlled KR schedule concurrently develops more sensitive error-detection capabilities via a forward internal model (i.e., recognition schema) compared to yoked schedules. We further suggest, based on our interpolated activity data, that these superior capabilities are likely developed and refined during the KR-delay interval.
Our finding that an interpolated activity eliminated the robust learning advantages associated with self-controlled KR schedules is likely the result of structural interference (e.g., Marteniuk, 1986; Swinnen, 1990) with the aforementioned error-detection/estimation processes. This would explain why the self-controlled + interpolated group had similar learning to the yoked + interpolated and yoked + empty groups, yet diminished learning compared to the self-controlled + empty group. In other words, because the interpolated activity was performed immediately upon movement completion, response-produced feedback (e.g., proprioceptive information) of that response may have gone undetected as information-processing resources were instead directed to the number-solving task. Therefore, the self-controlled + interpolated participants were likely unable to use the actual sensory consequences of their movement in conjunction with their predicted sensory consequences to form a hypothesis regarding the accuracy of their motor response that could be used to subserve the KR decision. This resonates with Carter et al.’s (2014) proposition that self-controlled KR schedules are only effective for learning when a comparison between estimated and actual error is made, which in turn increases the informational value of the KR received (i.e., reduce uncertainty because information is transmitted; Marteniuk, 1976; Guadagnoli & Lee, 2004). This in turn would help learners develop and refine their performance appraisal abilities via response-produced feedback, which are crucial when the motor task must be performed without the possibility of receiving KR as on delayed retention and transfer tests (Kantak & Winstein, 2012).
In conclusion, we investigated the importance of the KR-delay interval for self-controlled KR learning advantages using an interpolated activity. Our results revealed that typical self-controlled KR learning advantages were eliminated in the self-controlled group that had to perform an interpolated activity during the KR-delay interval. The interpolated activity significantly degraded the effectiveness of self-controlling one’s KR schedule such that motor learning was comparable to levels found in the two no-choice yoked groups. We suggest this outcome was the result of these learners being unable to engage in key information-processing activities that contribute to the typically found self-controlled KR learning benefits. Such findings challenge the notion that motivational factors, derived by satisfying fundamental psychological needs through the opportunity to exercise choice, are at the helm of self-controlled KR learning advantages (e.g., Sanli et al., 2013; Lewthwaite et al., 2015). Instead, self-controlled KR learning advantages may stem from the informational value of the KR received being optimized via processes which lead to the development of more effective error-detection capabilities.
Notes
Although this idea was expressed by Chiviacowsky and Wulf (2005), the absence of yoked groups in their design posed a challenge for making conclusions regarding the relationship between choice over KR delivery and the timing of this decision with respect to the role of error estimation.
References
Adams, J. A. (1968). Response feedback and learning. Psychological Bulletin, 70(6), 486–504. doi:10.1037/H0026741.
Adams, J. A. (1971). Closed-loop theory of motor learning. Journal of Motor Behavior, 3(2), 111–150.
Aiken, C. A., Fairbrother, J. T., & Post, P. G. (2012). The effects of self-controlled video feedback on the learning of the basketball set shot. Frontiers in Psychology, 3, 338. doi:10.3389/fpsyg.2012.00338.
Carter, M. J., Carlsen, A. N., & Ste-Marie, D. M. (2014). Self-controlled feedback is effective if it is based on the learner’s performance: a replication and extension of Chiviacowsky and Wulf (2005). Frontiers in Psychology, 5, 1325. doi:10.3389/fpsyg.2014.01325.
Carter, M. J., & Patterson, J. T. (2012). Self-controlled knowledge of results: age-related differences in motor learning, strategies, and error detection. Human Movement Science, 31(6), 1459–1472. doi:10.1016/j.humov.2012.07.008.
Carter, M. J., Rathwell, S., & Ste-Marie, D. M. (2015). Motor skill retention is modulated by strategy choice during self-controlled knowledge of results schedules. Journal of Motor Learning and Development. (accepted).
Chiviacowsky, S. (2014). Self-controlled practice: autonomy protects perceptions of competence and enhances motor learning. Psychology of Sport and Exercise, 15(5), 505–510. doi:10.1016/j.psychsport.2014.05.003.
Chiviacowsky, S., & Wulf, G. (2002). Self-controlled feedback: does it enhance learning because performers get feedback when they need it? Research Quarterly for Exercise and Sport, 73(4), 408–415.
Chiviacowsky, S., & Wulf, G. (2005). Self-controlled feedback is effective if it is based on the learner’s performance. Research Quarterly for Exercise and Sport, 76(1), 42–48.
Goh, H. T., Sullivan, K. J., Gordon, J., Wulf, G., & Winstein, C. J. (2012). Dual-task practice enhances motor learning: a preliminary investigation. Experimental Brain Research, 222(3), 201–210. doi:10.1007/s00221-012-3206-5.
Guadagnoli, M. A., & Lee, T. D. (2004). Challenge point: a framework for conceptualizing the effects of various practice conditions in motor learning. Journal of Motor Behavior, 36(2), 212–224. doi:10.3200/Jmbr.36.2.212-224.
Kantak, S. S., Sullivan, K. J., Fisher, B. E., Knowlton, B. J., & Winstein, C. J. (2010). Neural substrates of motor memory consolidation depend on practice structure. Nature Neuroscience, 13(8), 923–925. doi:10.1038/Nn.2596.
Kantak, S. S., & Winstein, C. J. (2012). Learning-performance distinction and memory processes for motor skills: a focused review and perspective. Behavioural Brain Research, 228(1), 219–231. doi:10.1016/j.bbr.2011.11.028.
Kovacs, A. J., Boyle, J., Grutmatcher, N., & Shea, C. H. (2010). Coding of on-line and pre-planned movement sequences. Acta Psychologica, 133(2), 119–126. doi:10.1016/j.actpsy.2009.10.007.
Laughlin, D. D., Fairbrother, J. T., Wrisberg, C. A., Alami, A., Fisher, L. A., & Huck, S. W. (2015). Self-control behaviors during the learning of a cascade juggling task. Human Movement Science, 41, 9–19. doi:10.1016/j.humov.2015.02.002.
Lee, T. D., Wulf, G., Winstein, C. J., & Zelaznik, H. N. (2016). In Memoriam: Richard Allen Schmidt (1941–2015). Journal of Motor Behavior, 48(1), 1–4. doi:10.1080/00222895.2016.1124687.
Leinen, P., Shea, C. H., & Panzer, S. (2015). The impact of concurrent visual feedback on coding of on-line and pre-planned movement sequences. Acta Psychologica, 155, 92–100. doi:10.1016/j.actpsy.2014.12.005.
Lewthwaite, R., Chiviacowsky, S., Drews, R., & Wulf, G. (2015). Choose to move: the motivational impact of autonomy support on motor learning. Psychonomic Bulletin & Review,. doi:10.3758/s13423-015-0814-7.
Lewthwaite, R., & Wulf, G. (2010). Grand challenge for movement science and sport psychology: embracing the social-cognitive-affective-motor nature of motor behavior. Frontiers in Psychology, 1, 42. doi:10.3389/fpsyg.2010.00042.
Lin, C. H., Fisher, B. E., Winstein, C. J., Wu, A. D., & Gordon, J. (2008). Contextual interference effect: elaborative processing or forgetting-reconstruction? A post hoc analysis of transcranial magnetic stimulation-induced effects on motor learning. Journal of Motor Behavior, 40(6), 578–586. doi:10.3200/Jmbr.40.6.578-586.
Lin, C. H., Winstein, C. J., Fisher, B. E., & Wu, A. D. (2010). Neural correlates of the contextual interference effect in motor learning: a transcranial magnetic stimulation investigation. Journal of Motor Behavior, 42(4), 223–232.
Marteniuk, R. G. (1976). Information processing in motor skills. New York: Holt, Rinehart, and Winston.
Marteniuk, R. G. (1986). Information processes in movement learning: capacity and structural interference effects. Journal of Motor Behavior, 18(1), 55–75.
Miall, R. C., & Wolpert, D. M. (1996). Forward models for physiological motor control. Neural Networks, 9(8), 1265–1279.
Oldfield, R. C. (1971). The assessment and analysis of handedness: the Edinburgh inventory. Neuropsychologia, 9(1), 97–113. doi:10.1016/0028-3932(71)90067-4.
Panzer, S., Krueger, M., Muehlbauer, T., Kovacs, A. J., & Shea, C. H. (2009). Inter-manual transfer and practice: coding of simple motor sequences. Acta Psychologica, 131(2), 99–109. doi:10.1016/j.actpsy.2009.03.004.
Patterson, J. T., & Carter, M. (2010). Learner regulated knowledge of results during the acquisition of multiple timing goals. Human Movement Science, 29(2), 214–227. doi:10.1016/j.humov.2009.12.003.
Patterson, J. T., Carter, M., & Sanli, E. (2011). Decreasing the proportion of self-control trials during the acquisition period does not compromise the learning advantages in a self-controlled context. Research Quarterly for Exercise and Sport, 82(4), 624–633.
Salmoni, A. W., Schmidt, R. A., & Walter, C. B. (1984). Knowledge of results and motor learning: a review and critical reappraisal. Psychological Bulletin, 95(3), 355–386. doi:10.1037//0033-2909.95.3.355.
Sanli, E. A., Patterson, J. T., Bray, S. R., & Lee, T. D. (2013). Understanding self-controlled motor learning protocols through the self-determination theory. Frontiers in Psychology, 3, 611. doi:10.3389/fpsyg.2012.00611.
Schmidt, R. A. (1975a). Motor skills. New York: Harper and Row.
Schmidt, R. A. (1975b). Schema theory of discrete motor skill learning. Psychological Review, 82(4), 225–260. doi:10.1037/H0076770.
Schmidt, R. A., & Lee, T. D. (2011). Motor control and learning: a behavioral emphasis (5th ed.). Champaign: Human Kinetics.
Schmidt, R. A., & Young, D. E. (1991). Methodology for motor learning: a paradigm for kinematic feedback. Journal of Motor Behavior, 23(1), 13–24.
Shadmehr, R., & Krakauer, J. W. (2008). A computational neuroanatomy for motor control. Experimental Brain Research, 185(3), 359–381. doi:10.1007/s00221-008-1280-5.
Shadmehr, R., Smith, M. A., & Krakauer, J. W. (2010). Error correction, sensory prediction, and adaptation in motor control. Annual Review of Neuroscience, 33, 89–108. doi:10.1146/annurev-neuro-060909-153135.
Swinnen, S. P. (1988). Post-performance activities and skill learning. In O. G. Meijer & K. Roth (Eds.), Complex motor behaviour: the motor-action controversy (pp. 315–338). North Holland: Elsevier Science Publishers B.V.
Swinnen, S. P. (1990). Interpolated activities during the knowledge-of-results delay and post knowledge-of-results interval—effects on performance and learning. Journal of Experimental Psychology: Learning, Memory, and Cognition, 16(4), 692–705. doi:10.1037//0278-7393.16.4.692.
Swinnen, S. P. (1996). Information feedback for motor skill learning: a review. In H. N. Zelaznik (Ed.), Advances in motor learning and control (pp. 37–66). Champaign: Human Kinetics.
Swinnen, S. P., Nicholson, D. E., Schmidt, R. A., & Shapiro, D. C. (1990). Information feedback for skill acquisition: instantaneous knowledge of results degrades learning. Journal of Experimental Psychology: Learning, Memory, and Cognition, 16(4), 706–716. doi:10.1037/0278-7393.16.4.706.
Wolpert, D. M., Diedrichsen, J., & Flanagan, J. R. (2011). Principles of sensorimotor learning. Nature Reviews Neuroscience, 12(12), 739–751. doi:10.1038/nrn3112.
Wolpert, D. M., Miall, R. C., & Kawato, M. (1998). Internal models in the cerebellum. Trends in Cognitive Sciences, 2(9), 338–347.
Wulf, G., Schmidt, R. A., & Deubel, H. (1993). Reduced feedback frequency enhances generalized motor program learning but not parameterization learning. Journal of Experimental Psychology: Learning, Memory, and Cognition, 19(5), 1134–1150.
Acknowledgments
The authors would like to thank Caroline Anna Head and Piragus Puveendran for their help with participant recruitment and data collection.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Grants
Supported by a Natural Sciences and Engineering Research Council of Canada Alexander Graham Bell Canada Graduate Scholarship (MJC) and a University of Ottawa Research Development Grant (DSM).
Conflict of interest
None.
Ethical standards
All participants gave written informed consent prior to inclusion in the studies and the studies were conducted in accordance with the ethical guidelines of the University and hence with the ethical standards laid down in the 1964 Declaration of Helsinki and its later amendments.
Rights and permissions
About this article

Cite this article
Carter, M.J., Ste-Marie, D.M. An interpolated activity during the knowledge-of-results delay interval eliminates the learning advantages of self-controlled feedback schedules. Psychological Research 81, 399–406 (2017). https://doi.org/10.1007/s00426-016-0757-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00426-016-0757-2