
Abstract
The “rubber hand illusion (RHI)” is a perceptual illusion, which allows the integration of artificial limbs into the body representation of a person by means of combined visual and tactile stimulation. The illusion has been frequently replicated but always concerning the upper limbs. The present study verified an analog illusion that can be called the “rubber foot illusion” (RFI). In a conjoint experiment using both a rubber hand and a rubber foot, brushstrokes were applied to the respective real and rubber limb placed alongside the real one. However, only the artificial limb’s handling was visible. The brushstrokes were given either synchronously, with a delay of ±0.5 s, or without tactile stimulation of the real limb. Questionnaire data and the proprioceptive drift towards the rubber limb (determined by calling on the subjects to show where they locate their unseen limb) defined the illusion strength. Results revealed that the illusion was induced in both limbs with comparable strength, but only in the synchronous condition.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Normally, we know precisely what belongs to our own body and what belongs to the external world around us. There are, however, clinical conditions like somatoparaphrenia, where a person denies the ownership of a limb or even of an entire side of the body. Phantom sensations allocated to a limb after its amputation demonstrate that also a materially lost limb can still be felt as part of the body. Even healthy persons can be made to sense a foreign object as if it were the own limb. The so-called Rubber Hand Illusion (RHI), first described by Botvinick and Cohen (1998), is an example of the latter phenomenon. The illusion occurs if, for instance, temporally extended brushstrokes are applied synchronously to a seen rubber hand and to a participant’s real but unseen own hand (Tsakiris, Hesse, Boy, Haggard & Fink, 2007). Provided that the brushed artificial hand is in an anatomically plausible position to the real hand within a distance of maximally 30 cm (Lloyd, 2007; Tsakiris and Haggard, 2005; Holle, McLatchie, Maurer & Ward, 2011; Shimada, Fukuda & Hiraki, 2009), subjects perceive the rubber hand as their own hand at a location shifted towards the seen position of the rubber hand. In contrast, temporal asynchrony greater than 300 ms diminishes the illusion’s strength until it is not elicited any longer at delays greater than 500 ms, or if tactile stimulation is completely absent (Rohde, Di Luca & Ernst, 2011).
The RHI reveals that visual information belonging to a limb, together with congruent tactile information arriving just in time, drives the integration process. The result is a compromise between the seen and felt hand position, which favors the visual information, but affects also the experienced location (Botvinick & Cohen, 1998). Many studies have verified the RHI and similar illusions have been reported for the face (Paladino, Mazzurega, Pavani & Schubert, 2010), the head (Ramachandran, Krause & Case, 2011) or even the whole body (Lenggenhager Tadi, Metzinger & Blanke, 2007). These investigations concerning embodiment may indicate that the mechanism of sensory integration is also at work, if the specified part of the body can be viewed only by a mirror or virtually. These “remote” embodiments, however, are not in the focus of our paper, because we restrict the domain of our investigation to limbs viewable directly. In this context, the leg–foot domain has been widely neglected.
Research findings concerning multisensory processing indicate that the RHI may not be generalizable to all body parts in the same way, at least not quantitatively. Examination of this claim, however, has been difficult since a direct comparison between effects of the RHI and any other ownership illusion has been lacking so far. According to integration principles, the relative precision by which a modality is obtained with its respective sensor determines its influence on the integrative process (Welch & Warren, 1986). Hence, differences in the relative precision of tactile, visual and proprioceptive information between body parts may alter the strength or stability of the RHI.
Alterations in the way the illusion is experienced on other body parts had important implications for our understanding of how the body is represented or the link between body part and body ownership. Moreover, those variations had to be considered if one thinks about possible applications of the RHI to facilitate the incorporation of artificial limbs into the body representation of users (Beckerle, 2014) also referred to as body schema or body image, theoretical constructs describing our preexisting knowledge of our own body (position, orientation and perceptions) in relation to the external word (Holmes & Spence, 2006).
To answer this question, a suitable comparison of the illusion’s vividness between limbs is the comparison between hands and feet, which are both peripheral limbs with similar anatomical features (5 toes/fingers constructed of phalanges; mid portion, metatarsals/metacarpals and hind portion, tarsals/carpals) but distinct functional demands and sensory properties. These functional and sensory differences raise the question whether a rubber foot illusion (RFI) can be observed, since variations may lead to deviating integration processes during the elicitation of a body-ownership illusion. For example, tactile resolution in feet is lower than in hands (Weber, 1846). Feet are not supplied with afferent and efferent fibers as densely as arms and hands (Hajnal, Fonseca, Harrison, Kinsella-Shaw & Carello, 2007) and their representation in the somatosensory cortex is much smaller compared to hands (Penfield & Rasmussen, 1950). Thus, the lower resolution and consequently the lower precision of tactile information on the feet compared to hands may alter visual–tactile integration. Nevertheless, the illusion is probably still perceived.
At least the studies regarding appropriate stimulation of the back, with even lower tactile resolution than the feet, demonstrated an illusion comparable to the RHI (Lenggenhager et al., 2007). However, one cannot exclude that there are differences in illusion strength.
In addition, also different sensory domains combined in investigations can lead to inconsistent results. So, Schicke et al. (2009) studied visual–tactile integration in hands and feet. They found that the measures of integration were comparable regarding both limbs. In contrast, van Elk et al. (2013) focused on visual–proprioceptive integration and demonstrated that here a difference in the integration measures of the hands and feet may exist. Thus, the findings and assumptions regarding visual, tactile and proprioceptive information integration for hand compared to feet are not homogeneous, need further elaboration and do not allow to infer that the RFI is comparable or different from the RHI.
For this reason, the present paper tested whether or not an illusion similar in strength to the RHI could be evoked also in the lower limbs. Against the background that integration abilities between limbs may be deviating, we not only addressed the question whether the RFI can be elicited, but also whether its vividness is comparable to RHI. Therefore, in contrast to other studies, we compared the experiences during the RHI and RFI within the same subjects concurrently.
Methods
Participants
Thirty-one volunteers participated in the study (11 men and 20 women; average age M = 24, SD = 6.65). Participants were recruited at Technische Universität Darmstadt. The study was approved by the local ethics committee of the department of psychology and is in accordance with ethical principles laid down in the Declaration of Helsinki in 1964.
Measures
Proprioceptive drift
The proprioceptive drift was operationally defined as the difference in localization judgments of the participants´ left index finger (left hallux) before and after stimulation. To obtain these judgments, the experimenter moved a vehicle with a red lamp along a rail, which was attached to the back of both stimulation constructions, 10 cm above the stimulated limbs. Participants had to say stop if they thought the lamp was over their index finger (hallux) to indicate its felt position. In an attempt to avoid that subjects’ responses were affected by learning, the starting position of the vehicle was not fixed and varied by about several centimeters in each trial. Moreover, the judgment was obtained in the dark to prohibit orientation at visual marks during the task (Rohde et al., 2011).
Embodiment
The questionnaire scale Embodiment by Longo, Schuur, Kammers, Tsakiris and Haggard (2008) was used to psychometrically assess the extent of integration of the rubber model into the body representation of participants. The scale consists of ten items related to feelings of ownership (1–5), location (6–8) and agency (9–10) of the rubber hand. They explain up to 75 % variance of synchronous and asynchronous conditions within the RHI paradigm and have to be answered on a 7 point Likert scale ranging from “strongly agree”, “neither agree nor disagree” to “strongly disagree”.
For the present study, items were translated from English to German and adapted to include also the lower limbs. Original statements and their translated versions are depicted in Table 1. Additional control statements were not included, since other studies employing the RHI reported no difficulties with response biases of participants concerning these statements (Kammers, de Vignemont, Verhagen & Dijkerman, 2009; Ehrsson, Holmes & Passingham, 2005).
Procedure
During the experiment, participants were asked to take off their shoes and socks to enable brushstrokes on the skin. They received oral and written information on the experiment and gave their written informed consent to participate in the study. Participants were seated in front of two experimental setups so that it was possible to elicit RHI and RFI from the same place by turning the chair by 90°. Both setups concealed the participants’ real limbs, thus drawing attention to the rubber model.
The actual trial started by obtaining a pre-location judgment of the participants´ left hallux (in conditions comprising stimulation of the foot) or left index finger (in conditions comprising stimulation of the hand). Afterwards, the stimulation phase was explained, emphasizing the direction of attention towards the respective rubber model and the necessity to keep the own limb still. During stimulation, brushstrokes were continuously applied for 4 min at a frequency of 0.5 Hz from the proximal phalanx to the distal phalanx. We decided to use a rather long stimulation interval to ensure a proper elicitation of the illusion in both limbs in case that an illusion on the foot needs more time to develop. Stimulation was performed manually. Depending on the condition, strokes were synchronous, asynchronous or just indicated, i.e., the brush was moved above the skin without contacting the skin. Synchronous stroking consisted of temporal and spatial congruent strokes between the real hidden limb and the corresponding rubber model. Within the asynchronous condition, brushstrokes were alternately applied and started on the rubber limb when they had finished on the real limb (delay of approximately one second). The post-location judgment was obtained immediately after the stimulation phase.
At the end of each trial, participants were asked to complete a part of the questionnaire of Longo et al. (2008) about their experiences during the stimulation phase. While answering the questionnaire, participants were requested to move and relax their stimulated limb to ensure proper blood flow. Furthermore, the movement should disrupt a potential RHI/RFI, thus prohibiting carry over effects. The pauses between trials were standardized to 5 min. After the last trial, participants answered an additional questionnaire about demographics and prior experiences with the RHI.
Overall, each participant completed six trials with each factor combination of selected limb (hand vs. foot) and mode of stimulation (synchrony, asynchrony, no stimulation) once. Thus, the experiment employed a 2 × 3 factorial within-subject design. The succession of trials was: foot synchrony, foot asynchrony, foot no stimulation, hand synchrony, hand asynchrony, hand no stimulation, whereby the start of the sequence per subject varied according to a Latin square. The originally intended design was N × 6 Latin square with N = 6, resulting in 36 subjects. However, only 31 subjects could be recruited. A one-way repeated measure ANOVA with the six sequences as factorial steps revealed no significant effect of the 31 Latin Square sequences, so we assume the design as balanced. Overall, the procedure lasted 1.30 h.
Setup for the RFI
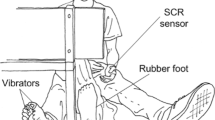
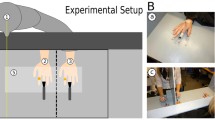
Stimulation of the foot took place on a divided setup (Fig. 1b). A horizontally and vertically sizable desk allowed concealing participants´ leg irrespective of their body proportions. Thereby, the impression was created that the artificial limb, a mannequin´s leg, emerged from one’s own torso. In addition, a movable cover was connected to the desk such that the real legs were out of view throughout the experiment. The second part was used as a leg rest and contained the rubber model.

Overview of the experimental setup. a Setup to elicit the RHI. The ruler was attached to the back of the box to read the participants’ position judgment. b Setup to elicit the RFI with visual cover on the sizable desk. c–d Display of the vehicle for the position judgment. e Synchronous stimulation of the foot
Setup for the RHI
A box with removed front and back was used to conceal the participants´ hands but to allow stroking from the other side (Fig. 1a). To standardize the hand position, participants should place their index fingers on marks inside the box. A left, life-size mannequin hand was attached to the side of the box. The distance between the participants´ left index finger and the model was 17.5 cm. Furthermore, a cloth, which was connected to the front side of the box, occluded the participants´ view of their arms to later enable the impression that the rubber model belongs to the own body.
Analysis
Data showed no significant deviation from normal distribution (Table 2). Thus, we applied two-way repeated measure ANOVAs to the questionnaire ratings and the proprioceptive drift. Significant effects were analyzed, post hoc, with Bonferroni corrected t tests for paired samples. Bonferroni correction was performed for each dependent variable and limb separately; thus the corrected significance level was α = 0.05/3 = 0.017
.
Results
For each participant, the responses to the 10 questionnaire statements were averaged, obtaining one subjective rating of the illusion’s vividness per subject. Figure 2 displays the means and standard errors of these ratings depending on the mode of stimulation (synchronous, asynchronous, no stimulation) and the selected limb (hand, foot).

Means and standard errors of questionnaire ratings by “mode of stimulation” and “limb”
The two-way repeated measure ANOVA with the factors selected limb and mode of stimulation yielded a significant main effect of stimulation [F(1.315, 39.457) = 34.801, p < 0.001, η 2 = 0.537]. Since the assumption of sphericity was violated [Mauchly´s test: χ 2(2) = 21.325, p < 0.001], Greenhouse-Geisser correction (ε = 0.658) was used. Post hoc paired t tests between synchronous and asynchronous stimulation [t(30) = 6.31, p < 0.001] and no stimulation [t(30) = 6.03, p < 0.001] exhibited significance. Asynchronous and no stimulation did not significantly differ [t(30) = −1.65, p = 0.109].
Neither the factor limb [F(1, 30) = 0.004, p = 0.947, η 2 = 0.0], nor the interaction of the factors limb and stimulation [F(2, 60) = 1.099, p = 0.340, η 2 = 0.035] reached significance. Therefore, there is no statistical support that the illusion´s vividness deviates between both limbs during synchronous, asynchronous or no stimulation.
Proprioceptive Drift
The proprioceptive drift was calculated by subtracting the pre-treatment positional judgment from the post-treatment positional judgment. On average, participants judged their real limb´s position at 49.762 cm (SD = 2.814) before stimulation and 51.001 cm (SD = 3.602) afterwards. A value of 50 cm represents the participant´s real limb position (distance to point of reference on the lab desk). Figure 3 shows means and standard errors of the proprioceptive drift by selected limb and mode of stimulation.

Means and standard errors of the proprioceptive drift by “mode of stimulation” and “limb”
To exclude the possibility that differences between the conditions´ proprioceptive drift were attributed to differences at pre-position judgment, a two-way repeated measure ANOVA was run on the pre-data. As expected, the pre-position judgments were neither affected by the main effect of hand/foot F(1, 30) = 3.505, p = 0.071, η 2 = 0.105, nor by the mode of stimulation F(2, 60) = 0.804, p = 0.452, η 2 = 0.026, nor the interaction of both factors, F(2, 60) = 0.745, p = 0.479, η 2 = 0.024. Consequently, it is assumed that there were no differences in position sense between conditions prior to the experimental manipulation.
The two-way repeated measure ANOVA with the factors selected limb and mode of stimulation yielded a significant main effect of stimulation [F(2, 60) = 11.595, p < 0.001, η 2 = 0.279]. Post hoc paired t tests of the proprioceptive drift between the synchronous and asynchronous condition [t(30) = 4.78, p < 0.001] and the synchronous and no stimulation condition [t(30) = 2.91, p = 0.007] are significant, whereas the asynchronous and no stimulation condition did not significantly differ [t(30) = −1.81, p = 0.08].
The main effect of the stimulated body part, however, was marginally significant [F(1, 30) = 4.048, p = 0.053 η 2 = 0.119], indicating that proprioceptive hand drift tends to be higher. The interaction of the factors hand/foot and stimulation revealed no significance [F(2, 60) = 1.745, p = 0.183, η 2 = 0.055].
Graphic inspection of the proprioceptive drift data indicated that post-treatment positional judgment is differently affected by the factor hand/foot in the condition no stimulation (higher drift on the hand compared to the foot). Therefore, post hoc paired sample t tests were computed between hand and foot in dependency of stimulation. Paired t tests between hand and foot revealed no deviating proprioceptive drift between limbs in the synchronous condition [t(30) = −0.105, p = 0.456, d = 0.028] or asynchronous [t(30) = −0.987, p = .331, d = 0.249]. Proprioceptive drift, however, differed significantly between hand and foot in the condition no stimulation [t(30) = −3.203, p = 0.003, d = 0.55], indicating that a proprioceptive drift on the hand can also be observed without synchronous stimulation.
Discussion
The purpose of the study was to apply the Rubber Hand Illusion paradigm also to the lower limbs concurrently in the same subjects. The results of subjective and behavioral measures indicated that subjects experienced, similar to the RHI, an illusion we called Rubber Foot Illusion/RFI), a finding which has not been reported yet. Irrespective of the selected limb, participants displayed embodiment of the rubber model and recalibrated position sense towards the rubber model, as long as stimulation occurred synchronously. In both control conditions (absent or asynchronous tactile stimulation), embodiment failed or diminished, resembling the large body of literature regarding the RHI indicating that visual and tactile information together drive the illusion (Botvinick and Cohen, 1998; Ehrsson, Spence & Passingham, 2004; Longo et al., 2008).
Our subjective data are in agreement with other studies using the present questionnaire version (Heed et al., 2011; Longo et al., 2008; Tsakiris, Carpenter, James & Fotopoulou, 2010). In particular, we observed higher agreement to questionnaire items during synchronous conditions compared to asynchronous conditions. Moreover, also the proprioceptive drift measurement resembled findings within the literature. A review by Makin et al. (2008) stated that reported drifts during the illusion condition vary on average between 15 and 30 % of the whole distance between the real hand and the rubber model. This variation was also observed in the present study (hand: 19.6 %; foot: 20.29 %).
In addition to a synchronous stimulation to elicit an illusion and asynchronous stimulation as a control group, we employed a second control condition, in which stimulation was absent and brushstrokes were just simulated. This condition was included on the basis of the study by Rohde et al. (2011), who questioned the adequacy of asynchronous stimulation as a control condition. While the authors assessed the illusion’s strength only by means of the proprioceptive drift, the present study also collected questionnaire data for the imitated stimulation. The average agreements with questionnaire items were comparable to asynchronous conditions and significantly lower than agreements for synchronous conditions. In the second control condition, subjects reported no illusion, neither on the hand nor on the foot. This was the case as long as tactile and visual information was uncorrelated. Behavioral data were inconclusive regarding the question whether participants experienced an illusion during no stimulation. In accordance with Rohde et al. (2011), we were able to detect a proprioceptive drift in the condition “no stimulation” of the hand. A comparable drift for the feet was absent.
The finding that the mere visual exposure of an artificial hand is sufficient to induce a recalibration of proprioceptive position sense was also reported by Holmes, Snijders and Spence (2006), whose participants displayed biased reaching movements after viewing a rubber model of a hand in the mirror. The authors concluded that as long as visual information of the hand position is available, subjects can use the proprioceptive information for sensory integration. Hence, the measure of proprioceptive drift would be independent of RHI.
Our results regarding the proprioceptive drift, however, indicate that this measure might be dissociable in two components. One could be attributed to a bias in position sense due to visual information, independent of RHI, and an additional component might be due to embodiment of the model and adaption of position sense. This may explain why a proprioceptive drift in the condition “no stimulation” on the foot did not occur, since the visual component of the proprioceptive drift is smaller than on the hand. This notion is supported by studies investigating the extent to which proprioceptive information is adapted during position judgment while visual information is manipulated by prisms (van Beers, Sittig & Denier van der Gon, 1998; van Beers, Beers, Wolpert & Haggard, 2002), which is comparable to viewing a rubber hand or a rubber foot, while covering the real limb by an opaque screen and asking the subject to assess the real limb’s position. These studies have shown that participants rely less on visual and more on proprioceptive information to judge the position of their limbs with increasing distance from their eyes (van Beers et al., 2002). In our study, participants might have been less influenced by visual information about limb position when judging the location of the foot compared to the hand. This reduced bias may lead to a lower proprioceptive drift in the condition “no stimulation” on the foot compared to the hand, which is independent of observed effects during an actual illusion.
We directly compared the illusion’s strength between upper and lower limbs. It was not just possible to elicit RFI as described above; the illusion effect was also comparable to RHI in size. We were not able to detect quantitative (proprioceptive drift, averaged questionnaire value) or qualitative (questionnaire subcomponents) differences between the limbs during synchronous conditions. Thus, it can be assumed that principles of multisensory integration within the RHI paradigm are generalizable to the lower limbs. Moreover, also ideas of the application of the RHI may not be restricted to the upper limbs. Prosthetic devices with sensors connected to tactile stimulators on the stump of the amputation (Ramakonar, Franz & Lind, 2011) could provide sensory feedback and foster the integration of the device into the body representation by means of RHI/RFI which is also observable in upper limb amputees (Marasco, Kim, Colgate, Peshkin & Kuiken, 2011; Rosen et al., 2009).
Even though the present study detected no differences in the illusion’s strength between RHI and RFI, differences cannot be ruled out completely. Since we only manipulated the mode of stroking, i.e., bottom–up processes of the illusion, the RFI may well be prone also to top–down influences of the body representation (e.g., rubber model congruency). Hence, there may be differences between RFI and RHI in the way they react to violations of a priori knowledge about the body. Support for this notion comes from studies utilizing the cross-modal congruency task to investigate interactions between vision and touch. In this paradigm, participants have to react to tactile stimuli on their hands or feet, while ignoring visual distractor stimuli and usually react more slowly if the visual distractor appears at an incongruent position with regard to the tactile stimulus (cross-modal congruency effect). While this cross-modal congruency effect has been reported to be the same for hands and feet, in the original paradigm (Schicke, Bauer & Roder, 2009; van Elk, Forget & Blanke, 2013), an adaption of the cross-modal congruency task with rubber limbs and the manipulation of anatomical plausibility and congruence demonstrated that the cross-modal congruency effect for hands but not feet was modulated by these parameters indicating different multisensory body representations for hands and feet (van Elk et al., 2013).
Finally, even though participants may have experienced differences between RHI and RFI, our experimental design was possibly not powerful enough to detect them. At first, proprioceptive drift measures and subjective ratings may not have been sensitive enough to detect differences in the illusion’s strength, especially since participants completed every experimental condition only once, resulting in a poor signal-to-noise ratio. The rather long stimulation interval of 4 min should have supported reliable illusion elicitation. Ehrsson et al. (2004) reported that participants in general reported an illusion on the hands after only 11 s. The rather long stimulation interval was chosen to ensure a proper illusion on the feet in case the RFI needs more time to develop than the RHI. Consequently, we oriented our stimulation length (4 min) on studies with modified RHIs in which the illusion’s vividness was altered (Bruno & Bertamini, 2010; Albrecht et al., 2011). Thus, we were able to detect an illusion on both limbs. Yet, potential deviations in the time course of the RHI and RFI may have been overshadowed and should be addressed in further experiments. Therefore, one could ask participants to indicate the onset of the illusion for each limb verbally or collect several proprioceptive drift measures throughout stimulation. A further limitations concern the employed questionnaire (Longo et al., 2008), which included no control statements. Hence, biased responses by participants cannot be ruled out. Nevertheless, agreement to questionnaire items in control conditions was rather low, indicating that participants exhibited no tendency to generally agree with questionnaire items.
Despite these limitations, our results extended the existing literature regarding the multisensory integration process of visual, tactile and proprioceptive information during a rubber limb illusion. While the literature underlined the dominance of visual information leading to a recalibration of proprioceptive sense, no study investigated whether the illusion may be altered between limbs, for example, due to deviating visual–tactile or visual–proprioceptive integration abilities. Even though, we did not test these abilities per se, our results show that spatiotemporal correlated sensory information from artificial and real limbs, independent of functional and sensory differences, lead to a feeling of ownership over a limb on which stimulation was viewed and a bias of position sensed. For this reason, it can be concluded that bottom–up processes of the feeling of self are similar for different body parts and possible (if any) differences in integration abilities overwritten by mechanisms responsible for the bodily self.
References
Albrecht, M. A., Martin-Iverson, M. T., Price, G., Lee, J., Iyyalol, R., & Waters, F. (2011). Dexamphetamine effects on separate constructs in the rubber hand illusion test. Psychopharmacology (Berl), 217(1), 39–50.
Beckerle, P. (2014). Human-machine-centred design and actuation of lower limb prosthetic systems. Aachen, Germany: Shaker Verlag GmbH.
Botvinick, M., & Cohen, J. (1998). Rubber hands ‘feel’ touch that eyes see. Nature, 391(6669), 756.
Bruno, N., & Bertamini, M. (2010). Haptic perception after a change in hand size. Neuropsychologia, 48(6), 1853–1856.
Ehrsson, H. H., Holmes, N. P., & Passingham, R. E. (2005). Touching a rubber hand: feeling of body ownership is associated with activity in multisensory brain areas. Journal of Neuroscience, 25(45), 10564–10573.
Ehrsson, H. H., Spence, C., & Passingham, R. E. (2004). That’s my hand! Activity in premotor cortex reflects feeling of ownership of a limb. Science, 305(5685), 875–877.
Hajnal, A., Fonseca, S., Harrison, S., Kinsella-Shaw, J., & Carello, C. (2007). Comparison of dynamic (effortful) touch by hand and foot. Journal of Motor Behaviour, 39(2), 82–88.
Heed, T., Grundler, M., Rinkleib, J., Rudzik, F. H., Collins, T., Cooke, E., et al. (2011). Visual information and rubber hand embodiment differentially affect reach-to-grasp actions. Acta Psychologica, 138(1), 263–271.
Holle, H., McLatchie, N., Maurer, S., & Ward, J. (2011). Proprioceptive drift without illusions of ownership for rotated hands in the “rubber hand illusion” paradigm. Cognitive Neuroscience, 2(3–4), 171–178.
Holmes, N. P., Snijders, H. J., & Spence, C. (2006). Reaching with alien limbs: visual exposure to prosthetic hands in a mirror biases proprioception without accompanying illusions of ownership. Perception and Psychophysics, 68(4), 685–701.
Holmes, N. P., & Spence, C. (2006). Beyond the Body Schema: Visual, Prosthetic, and Technological Contributions to Bodily Perception and Awareness. In G. Knoblich, I. M. Thornton, M. Grosjean, & M. Shiffrar (Eds.), Human body perception from the inside out: Advances in visual cognition. Advances in visual cognition. (pp. 15-64). New York, US: Oxford University Press.
Kammers, M. P., de Vignemont, F., Verhagen, L., & Dijkerman, H. C. (2009). The rubber hand illusion in action. Neuropsychologia, 47(1), 204–211.
Lenggenhager, B., Tadi, T., Metzinger, T., & Blanke, O. (2007). Video ergo sum: manipulating bodily self-consciousness. Science, 317(5841), 1096–1099.
Lloyd, D. M. (2007). Spatial limits on referred touch to an alien limb may reflect boundaries of visuo-tactile peripersonal space surrounding the hand. Brain and Cognition, 64(1), 104–109.
Longo, M. R., Schuur, F., Kammers, M. P., Tsakiris, M., & Haggard, P. (2008). What is embodiment? A psychometric approach. Cognition, 107(3), 978–998.
Makin, T. R., Holmes, N. P., & Ehrsson, H. H. (2008). On the other hand: dummy hands and peripersonal space. Behavioural Brain Research, 191(1), 1–10.
Marasco, P. D., Kim, K., Colgate, J. E., Peshkin, M. A., & Kuiken, T. A. (2011). Robotic touch shifts perception of embodiment to a prosthesis in targeted reinnervation amputees. Brain, 134(Pt 3), 747–758.
Paladino, M. P., Mazzurega, M., Pavani, F., & Schubert, T. W. (2010). Synchronous multisensory stimulation blurs self-other boundaries. Psychological Science, 21(9), 1202–1207.
Penfield, W., & Rasmussen, T. (1950). The Cerebral cortex of man: a clinical study of localization of function. New York: Macmillan.
Ramachandran, V. S., Krause, B., & Case, L. K. (2011). The phantom head. Perception, 40(3), 367–370.
Ramakonar, H., Franz, E. A., & Lind, C. R. (2011). The rubber hand illusion and its application to clinical neuroscience. Journal of Clinical Neuroscience, 18(12), 1596–1601.
Rohde, M., Di Luca, M., & Ernst, M. O. (2011). The Rubber Hand Illusion: feeling of Ownership and Proprioceptive Drift Do Not Go Hand in Hand. PLoS ONE, 6(6), e21659.
Rosen, B., Ehrsson, H. H., Antfolk, C., Cipriani, C., Sebelius, F., & Lundborg, G. (2009). Referral of sensation to an advanced humanoid robotic hand prosthesis. Scandinavian Journal of Plastic and Reconstructive Surgery and Hand Surgery, 43(5), 260–266.
Schicke, T., Bauer, F., & Roder, B. (2009). Interactions of different body parts in peripersonal space: how vision of the foot influences tactile perception at the hand. Experimental Brain Research, 192(4), 703–715.
Shimada, S., Fukuda, K., & Hiraki, K. (2009). Rubber hand illusion under delayed visual feedback. PLoS One, 4(7), e6185.
Tsakiris, M., Carpenter, L., James, D., & Fotopoulou, A. (2010). Hands only illusion: multisensory integration elicits sense of ownership for body parts but not for non-corporeal objects. Experimental Brain Research, 204(3), 343–352.
Tsakiris, M., & Haggard, P. (2005). The rubber hand illusion revisited: visuotactile integration and self-attribution. Journal of Experimental Psychology: Human Perception and Performance, 31(1), 80–91.
Tsakiris, M., Hesse, M. D., Boy, C., Haggard, P., & Fink, G. R. (2007). Neural signatures of body ownership: a sensory network for bodily self-consciousness. Cerebral Cortex, 17(10), 45.
van Beers, R. J., Sittig, A. C., & Denier van der Gon, J. J. (1998). The precision of proprioceptive position sense. Experimental Brain Research, 122(4), 367–377.
van Beers, R. J., Wolpert, D. M., & Haggard, P. (2002). When Feeling Is More Important Than Seeing in Sensorimotor Adaptation. Current Biology, 12, 834–837.
van Elk, M., Forget, J., & Blanke, O. (2013). The effect of limb crossing and limb congruency on multisensory integration in peripersonal space for the upper and lower extremities. Consciousness and Cognition, 22(2), 545–555.
Weber, E. H. (1846). Der Tastsinn und das Gemeingefühl. In R. Wagner (Ed.), Handwörterbuch der Physiologie. Braunschweig: Vieweg.
Welch, R. B., & Warren, D. H. (1986). Intersensory Interaction. In L. Kaufman, & J. P. Thomas (Eds.), Handbook of Perception and Human Performance New York: Wiley-Interscience.
Acknowledgments
Special thanks to Manfred Häfke at Technische Universität Darmstadt, who built the apparatus to elicit the RHI and RFI.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Flögel, M., Kalveram, K.T., Christ, O. et al. Application of the rubber hand illusion paradigm: comparison between upper and lower limbs. Psychological Research 80, 298–306 (2016). https://doi.org/10.1007/s00426-015-0650-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00426-015-0650-4