
Abstract
This paper concentrates on the system that controls the femur-tibia joint in the legs of the stick insect, Carausius morosus. Earlier investigations have shown that this joint is subject to a mixture of proportional and differential control whereby the differential part plays a prominent role. Experiments presented here suggest another interpretation: single legs of a stick insect were systematically perturbed using devices of different compliance and compensatory forces and movements monitored. When the compliance is high (soft spring), forces are generated that return the leg close to its original position. When the compliance is low (stiff spring), larger forces are generated but sustained changes in position occur that are proportional to the force that is applied. Selective ablation of leg sense organs showed that the leg did not maintain its position after elimination of afferents of the femoral chordotonal organ. Ablation of leg campaniform sensilla had no effect. These data support the idea that different control strategies are used, depending upon substrate compliance. In particular, what we and other authors have called a differential controller, is now considered as an integral controller that “intelligently gives up” when the correlation between motor output and movement of the leg is low.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Control of behavior has to deal with the problem of reaching a given goal even if obstructions occur. Predictable obstructions could be treated by using an internal world model. In the case of unexpected changes, a controller can be used that exploits feedback signals in order to compensate for the disturbance. When only one value, for example a joint position, or a velocity, has to be controlled, such a controller could be implemented as a proportional controller (P-controller), an integral controller (I-controller), a differential controller (D-controller), or different combinations of these. These different types of negative feedback systems can be distinguished experimentally. A negative feedback system with an I-controller is characterized by its property to completely compensate the effect of a disturbance. A P-controller instead only compensates for a given ratio. If a pure D-controller is applied, there is a fast counteraction to the dynamic part of the disturbance, but no compensation of the static part.
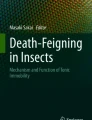
Technical solutions are often realized as PID-controllers. In biological systems most often P- or PD- controllers are applied (e.g., Cruse 1996). An apparent exception is given by the resistance reflex in insect leg joints. The system controlling the femur–tibia joint in stick insects has been intensively studied (Bässler 1965, 1983; Bässler and Büschges 1998). The leg of a stick insect contains three joints, the thoracic-coxal joint, that moves the leg mainly in forward–backward direction, the coxa-trochanter joint, that moves the leg up or down controlling body clearance, and the femur–tibia joint (or “knee” joint), that controls the distance between body and tarsus (leg tip) and therefore also contributes to body clearance (Fig. 1a). The femur-tibia joint is moved by the extensor tibiae and the flexor tibiae. Its angular position is monitored by the femoral chordotonal organ situated at the basis of the femur and connected to the tibia via a long receptor apodeme (Bässler 1983). An externally applied stepwise flexion of the joint is opposed by the extensor muscle. The same effect can be found when only the chordotonal organ is experimentally elongated. Correspondingly, extension of the femur–tibia joint results in an activation of the flexor muscle. This resistance reflex represents a negative feedback controller.

a leg morphology, b basic experimental design. The stick insect is fixed dorsally to a holder. Front legs point straight forward parallel to the long axis of the body (thanatosis). Right middle leg and both hind legs stand on solid substrate. The left middle leg stands on a platform that is fixed to a vertical elastic band made of spring steel of variable length. The basis of the steel band can be moved to the right or to the left (lower scale) in order to apply horizontal forces to the leg. The resulting leg position is recorded (upper scale)
Typically after stepwise activation, the flexor force first increases but then decreases to nearly zero with a time constant in the order of seconds. This result was confirmed in many different experiments (reviews Bässler 1983; Graham 1985; Bässler and Büschges 1998) using different stimulation procedures (mainly step functions, but also ramp functions and sinusoidal input). It led to the interpretation of the femur–tibia controller as a D-controller, because the resistance reflex at first opposes the external disturbance, but this effect ceases after some time. Such a solution is unusual in technical systems.
Recently, Bartling and Schmitz (2000) reported that, in free walking stick insects, the force developed by a leg in normal walking depends on the compliance of the substrate. On stiff ground, the forces pointing away from the body are larger than on soft ground. Bartling and Schmitz (2000) did not investigate this phenomenon systematically. In the present study, we examined the activity of the femur–tibia joint in dependence on systematic variation of the substrate’s compliance. Our new results show that the time course of the force developed by the leg strongly depends on the compliance. Only quite stiff substrate elicits a reaction of predominantly D-type as described above, medium stiffness leads to a predominantly P-type reaction, whereas very soft substrate reveals the property of an I-controller, which acts against a disturbance and maintains the original position of the leg over more than an hour.
As compliance is defined by the relation between distance moved and necessary force, these two values have to be measured by the leg. If the force and position signals are strongly correlated, compliance is high. If force changes are not paralleled by changes in position, the correlation is weak. There are position sensors (e.g., the chordotonal organ) and force sensors (e.g., the campaniform sensilla) to actually measure the two variables. As an alternative, instead of using the force sensors, the CNS could also exploit the efference copy of the signals sent to the muscles. Destruction of the campaniform sensilla should show whether these sense organs play a critical role for the determination of substrate compliance. According to the present results this is not the case.
Materials and methods
Adult female stick insects (Carausius morosus) were used throughout. The animal was fixed dorsally to a holder with the body long axis pointing in the horizontal direction. Animals were brought to hold both front legs in the thanatosis position, i.e., pointing straight forward parallel to the long axis of the body. Both hind legs and the right middle leg were placed on fixed balsa wood beams with a distance of 30 mm between the beam for the left legs and that for the right legs. These legs were placed in a normal standing position. The left middle leg was placed on a separate balsa beam, which was fixed to an elastic band made of spring steel (13 mm broad, 0.05 mm thick) of variable length (Fig. 1b). In “zero position” the orientation of the middle leg femur was horizontal and that of the tibia vertical, forming a femur–tibia angle of 90°. The plane formed by femur and tibia was perpendicular to the long axis of the body.
The stimulus was applied to the leg by moving the basis of the steel band stepwise by a given distance in horizontal direction to or away from the body (i.e., along the transverse body axis). This geometrical arrangement stimulated mainly the femur–tibia joint, but allowed for a natural reaction of the whole leg: a 5-mm movement of the tarsus corresponds to a change of approximately 27° in the femur–tibia joint and 7° in the basal joints, i.e., the sum of the movement in the coxa-trochanter joint and the neighbouring thoracic-coxal joint. Approximately the same relation applies to the joint torques due to the stimulus. A control experiment has shown that in the thoracic-coxal joint no significant forces have been measured in the direction of the body long axis, i.e., in forward–rearward direction.
For the application of small movements (0–20 mm) the steel spring was pointing vertically up (Fig. 1b) with its basis fixed to a micromanipulator (MM33). Movement velocity at the mircomanipulator was 1 mm s−1. For these experiments N=6 animals were used with nine measurements for each animal and leg position (n=54). For large displacements and higher forces, the steel band was mounted on a self-constructed turn table, now pointing in the horizontal direction. For these experiments N=10 animals were used with one measurement per animal and leg position (n=10). According to a control experiment the time-course of the force applied to the leg followed the hand driven movement of the micromanipulator without visible distortion, except for a small time delay. For the softest spring steel used this delay was ca. 0.05 s (Fig. 4). In the experiments using the horizontal steel band, the duration of the stimulus ramps varied between 0.3 and 1.0 s depending on the stimulus amplitude. By variation of the length of the steel band between 8 and 17 cm the spring constant (spring stiffness) could be changed between 0.252 and 0.007 N m−1.
The movement of the leg tarsus was directly recorded using a video camera and a monitor (spatial resolution ±0.25 mm). It has been known for some time that the reaction of the femur–tibia joint contains a strong phasic part. Therefore, the reaction (i.e., the resulting position) of the leg to the stepwise input was measured directly after the stimulus, i.e., when the maximum force is developed by the leg to oppose the external disturbance, and after 3 min. The first is called the dynamic response, the second is called the static response. After a step of 3 min has been applied, the steel band is moved back to its zero position. If the leg does not move back to its zero position on its own, it is placed back by hand and held there for about 3 min. The leg then maintains this new position by itself (flexibilitas cerea, Bässler and Foth 1982). After a pause of another 3 min another stimulus is applied. Stimuli of different amplitudes are given in randomized order.
The results are shown by plotting the movement of the leg tarsus versus the force applied to the leg. In these diagrams (Fig. 2) we show the static force values only. Static forces are not influenced by the speed of the stimulus ramp, but only by its amplitude. In the other diagrams both the static and the dynamic responses are given.

Leg position versus force. a Static response for different substrate stiffnesses (see inset) and different forces applied, mean ± SD. Open symbols: vertical spring steel (N=6, n=54); closed symbols: horizontal spring steel (N=10, n=10), all animals intact, x: receptor apodeme of the chordotonal organ cut (N=8, n=8; results shown are measured 1 day after operation). SD is not shown if smaller than symbol size. b corresponding experiments with low stiffness and different scaling (abscissa) to allow for a better resolution
The experiment was repeated after the receptor apodeme of the femoral chordotonal organ has been cut. The latter experiment was performed to test the contribution of the chordotonal organ to the response observed. In the second experiment, all four groups of campaniform sensilla situated at the trochanterofemur joint (Bässler 1977) were destroyed (for details see Schmitz 1993). In each experimental series, N =8 animals were investigated using a stiffness of 0.051 N m−1 and six different step sizes (horizontal steel spring). The experiments were performed 1 h, 1 day, and 1 week after the operation. In each case, each animal was tested once for each step size.
For the soft substrates (spring constant ≤0.252 N m−1, Figs. 2, 4 and 6a), the force that was applied to the leg could be calculated from the movement of the steel spring and its spring constant. This is possible because in a static situation, the force developed by the leg must exactly correspond to the force developed by the elastic spring. For stiffer substrates (Figs. 5 and 6b, c), force was measured with strain gauges (Vishay type SPB3-18-100) glued to the spring steel band, because in these cases the movement of the spring was too small to be measured.
Results
Static behavior
The platform on which the middle leg is standing develops a force onto the leg, when the basis of the platform is moved stepwise. As a consequence, the leg opposes this externally applied force. Generally, the counteracting force developed by the leg is smaller when the basis of the platform is moved away from the body. This agrees with earlier measurements and the observation that the flexor muscle is much stronger than its antagonist, the extensor muscle. A qualitatively new result is, however, the following. When varying the compliance of the substrate by changing the length of the steel spring, the behavior of the leg shows dramatic differences: for a very soft spring and within a definite range of applied forces, leg position is kept fixed. This range depends on the stiffness of the spring. For less compliant substrate, i.e., stiffer springs, apart from a short and small dynamic response, the leg holds the platform in a fixed position which is proportional to the force applied. Furthermore, the relative size of the dynamic response increases, when the substrate gets stiffer (see below).
At first, we concentrate on the static response to a stimulus where the leg is moved away from the body, i.e., on forces developed by the flexor muscle. Fig. 2a shows some selected position—force plots for different compliances (stiffness between 0.019 and 0.252 N m−1, open symbols: vertical spring, closed symbols: horizontal spring steel). Fig. 2b shows the results for low stiffness (0.007–0.044 N m−1, vertical spring) with expanded abscissa. For a stiffness lower than about 0.05 N/m, the leg does not move up to an applied force of about 1.2–1.7 mN, depending on the compliance (values determined by calculating the regression lines of nonzero force and their section with the abscissa). This behavior corresponds to that of an I-controller, because the leg maintains its original position in spite of the externally applied forces. For higher forces, there is a deviation from the starting leg position that is about proportional to force applied. This corresponds to the property of a P-controller. For stiffer substrate (0.112, 0.252, but also 0.09 and 0.15 N m−1, not shown), the proportional behavior already begins with the smallest forces applied in these experiments, i.e., below 1 mN. This indicates that both parameters, force applied and compliance of the substrate are critical parameters that determine the properties of the controller (see Discussion, Fig. 8).
To test the long-term behavior of the I-controller, in a separate experiment the leg was moved away from the body (distal direction) for 90 min by 15 mm, corresponding to a force of 0.66 mN (Fig. 6a, stiffness 0.044 N m−1, N=9 animals). Over this long period individual animals eventually moved their legs in different directions, but apart from the already mentioned brief dynamic effect (for details see below) there was no significant change in leg position on average. Note that in Fig. 6 for better illustration, the force developed by the leg is shown instead of leg position (see Materials and methods).
Yox et al. (1982) describe a catch effect for locust leg muscles showing that muscles can oppose force without specific excitation. In order to test whether the property of the leg to hold position for small stiffness is simply a muscle property, and not due to a feedback system, the basic experiment (Figs. 1b, 2) was repeated before and after ablation of the femoral chordotonal organ which monitors the position of the femur–tibia joint. To this end, the receptor apodeme is cut (Bässler 1983). Following this operation, already the smallest stimulus leads to a large deviation of the leg (stiffness 0.051 N m−1, Fig. 2a, crosses).
The experiments described above for stimulation in distal direction (Fig. 2) have also been repeated in proximal direction to investigate the properties of the controller of the antagonistic extensor muscle. The movement of the vertical spring steel basis was 0, 5, 10, 15, and 20 mm (not shown). As mentioned, extensor forces are smaller compared to those developed by the flexor muscle in accordance with the results from the literature (Storrer and Cruse 1977, found a factor of about 3). Data collection was more difficult for the extensor muscle because when moving the platform to the body, the tarsus often refrained to hold the platform. Qualitative observation showed that also the latter behavior seemed to depend not only on the force applied, but on the compliance of the substrate, similarly as found for the transition between I-control and P-control in the flexor muscle.
Gain of the controller of both flexor and extensor muscle
In order to obtain a comprehensive overview on the behavior of both muscles of the femur–tibia control system, the compliance of the controller was estimated in the following way: Separately for both flexor and extensor muscles, for each substrate compliance investigated, the slopes of the regression lines have been calculated for the leg position versus force applied experimentally. This gives the compliance of the biological controller in m/N. This calculation has been performed for static and for dynamic values, but was restricted to the range of I-control in those cases where both I-control and P-control was found. The results in Fig. 3 show that the controllers for both muscles have qualitatively similar properties. For small substrate stiffness, there is a range of I-control (controller compliance=0). With increasing substrate stiffness, the compliance of the controller first increases, but then seems to level off at a somewhat smaller value. Generally, compliance of the extensor muscle is higher than that of the flexor muscle. Similarly, the compliance of the static responses is smaller than that of the dynamic parts.

Compliance of the biological controller for different substrate stiffnesses, separately shown for the flexor muscle, the extensor muscle and for static and dynamic responses. Mean values (N=6, n=54 for stiffness <1 N m−1, N≥10, n=10 otherwise)
Dynamic properties
In the following, the dynamic properties of the controller are considered separately in the situation when the controller behaves as an I-system and when it behaves as a P-system or a D-system.
What are the dynamic properties of the I-controller? Only the flexor part is investigated, because the flexor muscle shows the broader range of I-control (see Figs. 3 and 8). A soft substrate (stiffness 0.019 N m−1, horizontal steel spring) and two different stimuli were used: moving the micromanipulator stepwise by applying a force of 0.8 and 1.3 mN, respectively, to the leg (mean ramp duration 0.6 s). Movement of the stimulus and the leg was recorded with a video camera and later evaluated on a single frame basis (S-VHS, 50 frames s−1, spatial resolution ±0.25 mm). Mean values of stimuli and responses are shown in Fig. 4. The delay of 0.05 s produced by the mechanics of the soft spring (see Materials and methods) is already compensated for in this figure. The results show that using the 0.8-mN stimulus there is no detectable deviation apart from the small dynamic effect (Fig. 4a). For the 1.3-mN stimulus which is near the margin of the I-range, a small constant deviation of about 0.15 mm is observed (Fig. 4b).

Dynamic response (leg position, see right ordinate) in the I-controller range. Response of the flexor muscle. Substrate compliance 0.019 N m−1. Two stimuli (left ordinate), a 0.8 mN, b 1.3 mN, the time-courses of which are shown by the mean value of all stimulus traces. a: n=23, N=6 animals, b n=20, N=5 animals
Note that the dynamic part of the responses measured (approximately first 300 ms) shows considerable individual differences which is particularly obvious in Fig. 4a. Therefore, the detailed time-course of the mean values is not a sensible representation of individual time-courses. This is different for the static part (see the small SDs). In Fig. 4b, however, the large SDs in the static part do not result from hidden dynamics, but from a variation of the static positions each leg assumes in the different experiments.
In which way do the dynamic properties of the P- and D-controller depend on the compliance of the substrate? To test a broader range of substrate compliances, in another experimental series step responses for stiffer substrates have been studied. To compensate for the influence of the different compliances on stimulus amplitude, in these experiments the amplitude of the movement of the spring steel basis was chosen in such a way that the stimulus applied at the leg always showed an effective amplitude of 5 mm. Ramp duration was between 5.8 and 2.4 s (Fig. 5a–d). Mean values for a substrate stiffness of 1.07, 1.78, 53.9, and 86.3 N m−1 are shown in Fig. 5. In Fig. 5a–c the time-course is shown for 300 s (5 min) with a higher time resolution during the first 12 s following the step. In Fig. 5d the values are plotted for 30 min. Note that ordinate scales are different in each panel. The results show that the dynamic part of the response increases considerably when the substrate gets stiffer. For the highest stiffness investigated, the force value was not significantly different from zero after about 20 min.

Step response of the flexor muscle for different (high) substrate stiffness. Stimulus applied at leg tip is 5 mm in all cases. N≥10 animals for each substrate. Note that ordinate scales are different in all four panels. In d the scale of the abscissa differs from that of a, b, and c
Detection of substrate compliance
If the behavior of the controller depends on the substrate compliance, the animal should adapt to changes of substrate compliance if only substrate compliance, but not leg position is changed. This prediction was tested in the following way. The leg was placed on a special soft steel spring (stiffness 0.034 N m−1) whose upper part (3.5 cm) was stiffer and equipped with a pair of strain gauges. As in some of the earlier experiments (Fig. 2), the basis of the vertical spring was moved distally by 10 mm. This produced a static force (mean = 0.89 mN) which had to be counteracted by the flexor muscle. Then a clamp was applied to the steel spring in such a way that the free length of the spring above the clamp was shortened to 3.5 cm and thereby stiffened (83.4 N m−1). Care was taken to move the platform with the leg as little as possible during this procedure. Control experiments with just clamping the spring the same way but then loosen it again showed no long term effect on the behavior of the leg. This means that small disturbances unavoidable during this clamping procedure do not influence the results. When however, in the critical experiment, the clamp remained fixed, the force developed by the leg dropped from 0.89 mN to a value of less than 0.2 mN during about 20 min (Fig. 6b, N=12 animals). The function can be approximated by an exponential curve. This result shows not only that animals can detect a change in substrate compliance, but also that a stiff substrate leads to a decrease of force in the long run. The question remains open of how the substrate compliance can be detected although no apparent movement has taken place? A first hint is given when looking at Fig. 6c, which depicts a single run of this experiment with higher temporal resolution: there is no steady decrease of the force. The force developed by the leg rather appears to increase and decrease in an irregular manner, as if the leg actively tested the compliance of the substrate.

Reaction to changed substrate compliances. a Control showing the long-term behavior (box-and-whisker plots showing 5 and 95% limits), stiffness 0.044 N m−1, N=9. b Decrease of the force developed by the leg after fixing the position of substrate by means of a rigid clamp. Stiffness before clamping: 0.034 N/m, after clamping: 83.4 N m−1, N=12 animals. c Three sections of a single run of the experiment shown in b
To detect substrate compliance a correlation between change in substrate displacement and in force developed by the muscles has to be observed. Displacement of the femur-tibia joint can be measured by the femoral chordotonal organ. Change in force/load could be measured by the campaniform sensilla situated at the trochanter and femur (Bässler 1977). Information on force change could also be gained in the form of an efference copy by exploiting the signals that control the motor output of the corresponding muscles. Both possibilities could be used in parallel. In order to test whether the campaniform sensilla play a critical role, the basic experiment as shown in Fig. 2 (open circles, horizontal steel band) is repeated for a substrate stiffness of 0.051 N m−1, before and after the four fields of campaniform sensilla have been destroyed (N=8 animals). Results show that no significant differences can be found between intact and operated animals for both the dynamic and the static case (the latter is shown in Fig. 7). This excludes the possibility that these campaniform sensilla are exclusively used to detect substrate compliance. Instead, an efference copy signal has to be used, but campaniform sensilla might be used in parallel.

Leg position versus force, static response (as in Fig. 2a). Comparison between animals before and after ablation of campaniform sensilla (mean±SD, N=8, n=8). Measurements 1 h, 1 day and 1 week after operation
Discussion
The experiments presented here investigate the system that controls the leg position of a standing insect. Leg position and the experimentally applied forces are chosen in a way that the measured responses are mainly due to response of the femur-tibia joint. The following discussion concentrates on the control of the femur-tibia joint. As this joint and the other, more proximal joints (coxa-trochanter joint, thoracic-coxal joint) form a serial chain, all the joint controllers in principal must react the same way (except for the case that a joint reaches a mechanical limit or that one joint is held rigid by strong cocontraction of its antagonistic muscles).
Control strategies depend upon substrate compliance
Earlier results have shown that the femur-tibia joint controller can be described as a D-controller, as it adapts to a stepwise stimulation with a response that decreases to nearly zero force output with a time constant in the order of seconds (the time constant for the flexor muscle being smaller than that for the extensor muscle). Our results demonstrate that the underlying controller could be of I-type (Figs. 2, 4 and 6a), of predominantly P-type (Figs. 2, 5a and 6a), or of predominantly D-type (Fig. 5c, d), depending on the size of the applied force and the compliance of the substrate. The ranges are illustrated in Fig. 8 for the flexor muscle. If governed by an integral controller, the legs show no detectable movement when an external force is applied (Fig. 8, open circles). Being subject to a proportional controller, leg position depends in a proportional way upon the applied force (Fig. 8, closed circles). The leg develops some force, which however is not sufficient to maintain the original position of the leg. If governed by a D-controller, at the beginning of the disturbance, the leg develops an opposing force which decreases to near zero after some time (Fig. 8, crosses).

Flexor muscle: the range of I-, P-, and D-control in dependence of substrate stiffness (abscissa) and force applied (ordinate)
In the experiments presented here the animals were always fixed to a dorsal holder. Can the results also be applied to free standing animals? Diederich et al. (2002) investigated animals that stood on a horizontal plane with a weight pulling the body sideways in horizontal direction. The results showed that the leg controllers behave as I-controllers for small weights and as P-controllers for large weights in qualitative agreement with the results shown here.
Our results reveal that the leg controller gets stiffer, when the substrate is soft (Fig. 3, left part), and increases its compliance, i.e., gets softer with increasing stiffness of the substrate (Fig. 3, middle section). This fits to results of Ferris et al. (1997, 1998) who found a qualitatively similar behavior in humans walking on different substrates. These authors interpret their results in such a way that the controller acts to stabilize the stiffness of the complete system consisting of legs and substrate, i.e., the controller is less stiff if the substrate becomes more rigid. Related results have been described by De Vlugt et al. (2003) investigating human subjects who had to hold the position of a handle that was randomly disturbed. They found a modulation of displacement feedback gain and of velocity feedback gain when varying the dynamical properties of the environment. They conclude that “humans act like optimal controllers to optimize the combined dynamics of limb and environment together.” Changes of feedback gain were found to take place within seconds.
Qualitatively, the results obtained here for standing animals agree with the findings of Bartling and Schmitz (2000) who described a dependence on substrate compliance in walking stick insects, too. We have no explanation for the observation that the compliance of the leg controller again decreases to some degree when the substrate stiffness is further increased (Fig. 3, right part).
Substrate compliance is assumed to be determined by the correlation between the actual movement of the leg and the motor command. Apparently, campaniform sensilla are not the (only) basis for monitoring the motor output. Instead, results indicate that the CNS exploits an efference copy of the signals sent to the muscles. Because campaniform sensilla cannot distinguish between forces developed actively by the muscles and forces applied externally, correlation with an efference copy of the motor command is actually a sensible way to determine substrate compliance. The small irregular oscillations observed in Fig. 6c might be interpreted as to represent test signals superimposed to the motor output that are used to compare the changes in motor output with the actually resulting movement.
How can an I-controller show properties of a P- or a D-controller?
We hypothetically explain the results by an I-controller, and in addition a system that monitors the compliance of the substrate, i.e., the correlation between the motor command and displacement of the leg. If there is a strong correlation between the motor command and the movement of the substrate—which corresponds to a low stiffness of the substrate, I-control is adopted (Figs. 2 and 4). If this correlation is weak, corresponding to stiff substrate, motor output is decreased accordingly (Fig. 6b). On very stiff substrate, no movement can be detected when muscle force is changed (i. e., correlation is zero), and the motor output therefore decreases to a very low level (Fig. 5c, d). In this case, the I-controller “intelligently gives up”. As mentioned, this was interpreted earlier as a D-controller. The correlation to be monitored is also zero when the receptor apodeme of the chordotonal organ is ablated, and no active force output is observed in this case (Fig. 2a) in agreement with our hypothesis.
How can the P-properties be explained that have been observed on substrate of medium stiffness? In this situation correlation is not too strong which, according to our hypothesis, leads to some decrease of motor output. This in turn leads to a movement of the leg, because the steel spring is continuously pulling the leg back. As the spring approaches its resting position, its force decreases, too. Due to nonlinear characteristic of the muscles explained below, correlation strength increases, when the muscle force is small. This again activates the I-controller, but now at a new leg position. Therefore, the behavior resembles that of a P-control system. But why should we obtain stronger correlation between motor command and change in leg position when muscle force is small? A given change in the motor command would lead to larger changes of force when starting from a weakly excited muscle compared to a strongly excited one, because of the nonlinear, saturation-like characteristic of a muscle. Therefore, in the latter case, correlation is weaker.
It has been reported that muscles develop some force without specific stimulation (Yox et al. 1982). To rule out this possibility as an alternative explanation for the I-control behavior, control experiments with cut receptor apodeme of the chordotonal organ have been performed. Following this operation, already the smallest stimulus leads to a large deflection of the leg (Fig. 2a). This shows that sensory feedback is a necessary condition for the holding behavior and indicates that the interpretation as an I-controller is sensible. This experiment also shows that stimulation of sense organs other than the femoral chordotonal organ is not sufficient to drive the motor output in the femur–tibia joint. Furthermore, the fact that leg position is briefly changed after the disturbance but regains the earlier position (Fig. 4a) shows that the effect cannot be explained by passive muscle properties but rather requires an active process.
The effect of the D-properties might alternatively be explained by fatigue on the muscular level. Many investigations have however shown that this adaptation process occurs at the neuronal level, the units of which have been intensively studied (review Bässler and Büschges 1998).
Application to free standing animals
A free standing (or walking) insect has to cope with the following basic problem. A six-legged system, where each leg contains at least three joints, comprises a system with 18 degrees of freedom. As the body position is determined by six degrees of freedom, there is an infinite number of possibilities to arrange the torque values for the 18 joints for a given body position, one of which has to be chosen by the animal. This has often been termed the force distribution problem (Kindermann 2002). The situation might be illustrated by the restriction to a 2D situation with only two legs, for example two middle legs. Both legs have to carry their part of the body weight, applying a vertical force component. But in addition both legs could, to mention two extreme cases, either pull towards the body midline or push away from it. If these horizontal force components are opposite and equal, they cancel each other and no body movement is observed in either case. In both extreme cases a high amount of energy is used, but somewhere in between, depending on the exact geometrical leg configuration, there must be a force distribution that reflects a minimum of the total force required. The control system described here might be used to search such a minimum as it attempts to minimize motor output under the condition that the leg must not move. This is also shown in Fig. 6b, where, on soft substrate, the leg produces a force to maintain its position, but leg force decreases when, after clamping, the substrate force is sufficient to hold the leg in a given position.
Application to walking
For the control of the walking movements, Cruse et al. (1996, 1998) have proposed that the femur-tibia joints are controlled by positive feedback based on angular velocity. How could this concept of positive velocity feedback and the concept of negative position feedback, as it is described here, be integrated? Bartling and Schmitz (2000) discussed this problem already and, in order to explain their results, proposed that positive feedback may be switched off and changed to negative feedback, if the leg experiences an acceleration above a given threshold.
In applying our hypothesis to this problem, we can alternatively propose that the strength of correlation between motor command and leg movement is used instead of acceleration. According to this assumption, positive feedback is applied such that the velocity signal is added to the reference input of the I-controller during undisturbed walking. In this situation, there is a strong correlation between motor output signal and proprioceptive feedback, because, during undisturbed walking, the actual movement of the leg matches that of the motor command. If, however, the movement of the leg is disturbed by an external force, the correlation between motor command and leg displacement is weak. If we assume that a weak correlation inhibits the propagation of the positive feedback signal, the behavior of the leg is then governed by the negative feedback controller. As soon as the disturbance is ended and the normal movement continues, correlation increases and positive feedback is resumed again on the basis of the new position of the leg.
References
Bartling C, Schmitz J (2000) Reaction to disturbances of a walking leg during stance. J Exp Biol 203:1211–1233
Bässler U (1965) Proprioreceptoren am Subcoxal-und femur–tibia-Gelenk der Stabheuschrecke und ihre Rolle bei der Wahrnehmung der Schwerkraftrichtung. Kybernetik 2:168–193
Bässler U (1977) Sense organs in the femur of the stick insect and their relevance to the control of position of the femur–tibia-joint. J Comp Physiol 121:99–113
Bässler U (1983) Neural basis of elementary behavior in stick insects. Springer, Berlin Heidelberg New York
Bässler U, Büschges A (1998) Pattern generation for stick insect walking movements—multisensory control of a locomotor program. Brain Res Rev 27:65–88
Bässler U, Foth E (1982) The neural basis of catalepsy in the stick insect Cuniculina impigra. 1. Catalepsy as a characteristic of the femur–tibia control system. Biol Cybern 45:101–105
Cruse H (1996) Neural networks as cybernetic systems. Thieme, Stuttgart
Cruse H, Bartling C, Dean J, Kindermann T, Schmitz J, Schumm M, Wagner H (1996) Coordination in a six-legged walking system. Simple solutions to complex problems by exploitation of physical properties. In: Maes P, Mataric MJ, Meyer JA, Pollack J, Wilson SW (eds) From animals to animats 4. The MIT Press/Bradford Books, Cambridge, pp 84–93
Cruse H, Kindermann T, Schumm M, Dean J, Schmitz J (1998) Walknet—a biologically inspired network to control six-legged walking. Neural Netw 11:1435–1447
De Vlugt E, Schouten AC, van der Helm FCT (2003) Adaptation of reflexive feedback during arm posture to different environments. Biol Cybern 87:10–26
Diederich B, Schumm M, Cruse H (2002) Stick insects walking along inclined surfaces. Integr Comp Biol 42:165–173
Ferris DP, Farley CT (1997) Interaction of leg stiffness and surface stiffness during human hopping. J Appl Physiol 82:15–22
Ferris DP, Louie M, Farley CT (1998) Running in the real world: adjusting leg stiffness for different surfaces. Proc R Soc Lond B 265:989–994
Graham D (1985) Pattern and control of walking in insects. Adv Insect Physiol 18:31–140
Kindermann T (2002) Behavior and adaptability of a six-legged walking system with highly distributed control. Adaptive Behav 9:16–41
Schmitz J (1993) Load-compensating reactions in the proximal leg joints of stick insects during standing and walking. J Exp Biol 183:15–33
Storrer J, Cruse H (1977) Systemanalytische Untersuchungen eines aufgeschnittenen Regelkreises am Bein der Stabheuschrecke Carausius morosus. Kraftmessungen an den Antagonisten Flexor und Extensor Tibiae. Biol Cybern 25:131–142
Yox DP, DiCaprio RA, Fourtner CR (1982) Resting tension and posture in arthropoda. J Exp Biol 96:412–425
Acknowledgements
This work was supported by DFG grant Cr 58/9-3 and the graduate program 518 “Verhaltensstrategien und Verhaltensoptimierung”. We further acknowledge the helpful comments of two anonymous referees. The work complies with the current laws of Germany, where the experiments have been carried out.
Author information
Authors and Affiliations
Corresponding author
Additional information
We would like to dedicate this article to Prof. Dr. Ulrich Bässler. Starting in the 1960s, his seminal work stimulated a long series of fruitful studies that, even today, reveal exciting insights into motor control.
Rights and permissions
About this article
Cite this article
Cruse, H., Kühn, S., Park, S. et al. Adaptive control for insect leg position: controller properties depend on substrate compliance. J Comp Physiol A 190, 983–991 (2004). https://doi.org/10.1007/s00359-004-0555-y
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00359-004-0555-y