
Abstract
The phased array radar antennas of microwave remote sensing satellites can experience thermal deformation at extreme space temperatures, leading to a negative impact on image quality. This paper proposes a method for monitoring thermal deformation using Fiber Bragg Grating (FBG) sensing and the inverse Finite Element Method (iFEM). This study analyzes how the layout of FBG sensors affects the accuracy of reconstruction. It aims to optimize the topology of the FBG sensor network. Additionally, a strain transfer coefficient correction (STCC) algorithm is proposed to reduce the effect of strain transfer inaccuracies on the reconstruction result measurements. A Carbon Fiber Reinforced Polymer (CFRP) laminate is used as the simulation object for the radar antenna structure, and an experimental system is set up to monitor thermal deformation. The experimental results demonstrate that the maximum root mean square error (RMSE) is 0.038 mm under the temperature variation condition from 30 °C to 110 °C, which represents 5.4% of the maximum thermal deformation. The results indicate that the monitoring method is highly accurate in measuring the thermal deformation of critical structures in remote sensing satellites while in orbit. This method also shows great potential for a wide range of applications.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
High-resolution microwave remote sensing satellites are extensively utilized in various fields, such as national defense, environmental exploration, land management, disaster prevention, and urban planning. This is due to their numerous advantages, such as a wide viewing angle, extensive monitoring range, high resolution, precise image positioning accuracy, and long-term stability running [1,2,3,4,5,6]. Synthetic aperture radar (SAR) plays a vital role in satellite technology, enabling effective space-to-ground monitoring. However, due to issues of transmission loss caused by distance and other reasons, SAR needs to rely on larger-sized phased array antennas (PAAs) for transmitting images and other information. Due to extreme temperatures in space, PAAs can experience material deformation, structural fatigue damage, and other phenomena [7]. The pointing accuracy of antennas may be reduced, leading to a significant impact on imaging quality and image positioning accuracy [8]. Therefore, it is crucial to closely monitor the thermal deformation of the key structures of the satellites. Utilizing the collected monitoring data, we can make necessary adjustments to the images, enhancing the overall imaging quality and refining the material structure design. These are the key technologies to ensure the stable operation of remote sensing satellites.
Many scholars have conducted research on monitoring the thermal deformation of structures in remote sensing satellites while in orbit. Currently, monitoring methods can be categorized into two broad categories. The first is contact-type deformation monitoring methods based on strain sensors, such as the resistance strain gage measurement method. As a real-time monitoring technique, this method has been extensively utilized in spacecraft deformation and loading measurements ever since its invention in the 1950s. In 2023, Zhang et al. [9] collected temperature data in orbit by installing thermistors on the satellite and utilized the relative orientation of the star sensitizers to calculate thermal deformation. However, this method may face challenges, such as a significant system size, increased power consumption, and vulnerability to electromagnetic interference, limiting its ability to achieve long-term in-orbit monitoring. The second category includes non-contact deformation measurement methods, specifically the two-dimensional PSD (Position Sensitive Detector) laser displacement measurement methods. In 2006, Harrison et al. [10] utilized it for the Nuclear Spectroscopic Telescope Array (NuSTAR) exploration satellite, allowing for deformation monitoring of the X-ray optical system to 5 μm within ± 3 mm. Another non-contact in-orbit thermal deformation measurement method is photogrammetry. In 2023, Dong et al. [11] developed a non-contact dual-camera photogrammetry system for measuring the thermal deformation of antenna modules. They utilized the structural characteristics of antenna arrays and validated the accuracy of their design using five years of measured data. The advantages of this non-contact measurement method are simplicity and high reliability. However, it can only monitor the key points of the structure and cannot measure the full-field thermal deformation. Fiber Optical Sensing (FOS) is a measurement method that enables in-orbit full-field thermal deformation monitoring. It provides several advantages, including low power consumption, resistance to electromagnetic interference, high multiplexing, and easy networking. In the 1990s, NASA developed a Fiber Optical Sensing System (FOSS) for real-time acquisition of key parameters such as strain and temperature of spacecraft to monitor the health of spacecraft structures. In 2009, the European Space Agency (ESA) launched the Proba-2 satellite with a Fiber Sensor Demonstrator (FSD) for flight experiments in space. The experiment demonstrated the long-term stability of the FSD system in the space environment [12, 13]. These studies indicate that FOS is an effective method for monitoring thermal deformation in space. However, the sensing accuracy of this method can be influenced by the surrounding space environment. Therefore, it is crucial to account for environmental interference when setting up a thermal deformation monitoring system using FOS.
In addition, the PAAs have been developed with larger dimensions to enhance imaging quality and improve image localization. However, this increased size also renders the arrayed radar antennas more vulnerable to deformation caused by the space environment. To solve this problem, carbon fiber reinforced polymer (CFRP) is widely used in the structural design of radar antennas due to its high strength, lightweight, corrosion, and fatigue resistance [8, 14]. However, the thermal deformation performance of CFRP is quite complex, with small deformations and non-uniform changes, and there is still limited research on this topic. Therefore, further investigation is required to enhance the structural design of satellites and improve their monitoring performance and working life. This includes conducting high-precision displacement-field in-orbit measurements of small thermal deformations in CFRP.
This paper proposes a Temperature Self-Decoupling Thermal Deformation Monitoring (TSD-TDM) method for remote sensing satellite PAA structures. In contrast to others, this method achieves high-precision in-orbit monitoring and reconstruction of the thermal deformation field. It achieves this by combining FBG sensing with the inverse Finite Element Method (iFEM) of a four-node quadrilateral inverse-shell element. The main contributions of this paper are summarized as follows:
-
1.
The accuracy of the displacement field reconstruction algorithm is verified through both simulation and experiment. The strain transfer coefficient correction method (TSCC) based on an improved genetic algorithm is proposed to address the issue of inaccurate strain transfer. This method allows the precise reconstruction of small thermal deformation fields in environments with significantly variable temperatures.
-
2.
To optimize the sensor network for improving reconstruction accuracy, this paper investigates the effect of several sensing point bias schemes based on finite element simulation. Through a comparison of the reconstruction errors of various sensing points, the most suitable sensor network layout scheme is selected for experimental verification of the reconstruction algorithm.
-
3.
This study investigates the thermal strain characteristics of CFRP laminates in environments with significant temperature changes. The findings provide valuable insights for the deployment of sensors in thermal deformation monitoring systems.
The structure of this paper is organized as follows: Sect. 2 provides the principles of the method. Section 3 presents the experiments and their corresponding results. Finally, Sect. 4 discusses the conclusions and future work.
2 Method and algorithm design
2.1 Thermal deformation monitoring method based on FOS
The core of the Temperature Self-Decoupling Thermal Deformation Monitoring (TSD-TDM) method lies in reconstructing the displacement field using the inverse Finite Element Method (iFEM). The basic principle of iFEM involves utilizing piecewise interpolation to address a full-domain problem [15]. The required inputs include two-dimensional coordinate information, strain data, and boundary conditions. Among them, strain data could be obtained through the FBG sensing network. The overall flow of the iFEM is shown in Fig. 1a.

Flow of iFEM and element model. a Flowchart; b Element model and degrees of freedom
To successfully reconstruct the iFEM, it is crucial to carry out the element construction in order to calculate the strain–displacement matrix. The element structure selected in this paper is the four-node quadrilateral inverse-shell element (iQS4) [16], which has six degrees of freedom, including three directions of rotational degrees of freedom. This choice effectively prevents singular solutions and shear-locking phenomena during the calculation process. Its element model and degrees of freedom are shown in Fig. 1b.
There are three types of strains involved in the iQS4, which are membrane strains e(ue), bending curvatures k(ue) and transverse shear strains g(ue), where ue represents the element node displacement vector. Although iQS4 is based on Reissner–Mindlin kinematics theory for element construction, the dimensions of the phased array radar antenna on remote sensing satellites in the thickness direction (h) being far smaller than the minimum mid-plane dimension (b). The structure can be abstracted as a typical thin plate element (bending plate), which satisfies the Kirchhoff hypothesis of classical thin plate theory (h < b/50). Therefore, the influence of g(ue) in the deformation of the thin plate is extremely minor, and numerically much smaller than that of e(ue) and k(ue). As a result, we can safely ignore the effect of transverse shear strains on the results. The thin plate strain and nodal displacement can be expressed by [16]
where Bm represents the membrane strain matrix, contains the derivatives of the shape functions associated with the membrane deformation. Bb represents the bending matrix, and Bs is the transverse shear strain matrix, which define the derivatives corresponding to the shape functions of the element's bending response of element.
To address the off-plane displacement of the thin plate, iQS4 utilizes the in-situ strain data from the measurement points as input information. Therefore, the FBG strain sensing network can be used to collect three-way strain as the measured strain, which can then be used to determine the membrane strains and bending curvatures. The strain sensor in-situ deployment method is shown in Fig. 2.

In-situ deployment method of strain sensors
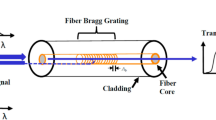
For FBG, the Bragg wavelength λB can be expressed as follows [17]:
where neff is the effective Refractive Index (RI) of the fiber core and Λ represents the grating period. These physical quantities change when the strain to be measured changes, which in turn causes the drift of λB, enabling the acquisition of strain data. However, the FBG strain sensing network may be subject to extreme temperature variations, leading to potential interference in the data acquisition. This is particularly true for small deformations in high-stability composites. Therefore, it is crucial to decouple the temperature of the FBG sensing network during the reconstruction process. In a spatial environment, the wavelength drift Δλ is defined as follows [23]:
where Kε represents the strain sensitivity coefficient, KT represents the temperature sensitivity coefficient, and Δε and ΔT represent the changes in strain and temperature, respectively.
Since KT is not a constant value under large temperature variations, the reference grating method [18] is used for temperature decoupling: A temperature reference grating is deployed near the FBG strain sensor, having identical material parameters. Collecting the wavelength drift data of the temperature reference grating allows us to conveniently eliminate the influence of temperature on the FBG strain sensor without the need to solve KT. The wavelength drift expression of the temperature reference grating affected by temperature is as follows:
where Δλ1 represents the wavelength drift of the reference grating and ΔT represents the temperature change.
Then, the strain can be calculated by the FBG sensor:
Finally, the membrane strain eε and bending strain kε can be obtained by Eq. (6) [16]:
where \(\varepsilon_{xx}^{ + } ,\varepsilon_{yy}^{ + }\), and \(\gamma_{xy}^{ + }\) are the measured top surface strains of the FBG at the element measurement point, \(\varepsilon_{xx}^{ - } ,\varepsilon_{yy}^{ - }\), and \(\gamma_{xy}^{ - }\) are the measured bottom surface strains, and h is the distance from the element midplane to the surface. As a bending plate, we can determine the thermal deformation field by measuring strain data exclusively on the upper surface.
The error function between the theoretical strain data and the actual strain data can be determined using the least squares variational principle, which includes e(ue), k(ue), and g(ue). For an inverse element, the error function is shown as
where we, wk, and wg are weighting constants whose values are related to the model and sensor deployment. Their values are related to in situ measurements. We typically assign a weighting constant of 1 to the data points with in-situ measurements and 10–4 to the ones without. In this paper, the weighting constants are set to we = wk = 1 and wg = 10–4.
Taking the minimal value for the partial derivation of Eq. (8) [21].
where ke represents the element pseudo-stiffness matrix and fe is the element pseudo-loading matrix. ke and f e are represented by Eq. (9):
where n represents the number of strain measurement points within a single surface element of a thin plate. It is important to note that if there are more than one sensor on one side, the solution for f e must be summed before integration.
Besides, in the thin plate structures, the value of \({\text{g}}_{i}^{\varepsilon }\) cannot be measured. As a result, we usually let \({\text{g}}_{i}^{\varepsilon } = 0\) in the calculation process.
We assemble the elements to construct the global Pseudo-stiffness matrix K and the global Pseudo-loading matrix F. Ultimately, the global displacement field U can be solved to achieve the reconstruction of the thermal deformation field [16].
2.2 Strain transfer coefficient correction algorithm
When measuring in space, the accuracy of monitoring the thermal deformation field is influenced by various factors. These factors include the reconstruction method and the errors in the strain values measured by the FBG sensing network. Due to variations in the quality of the sensor paste, the strain acquisition may be inaccurate, resulting in the degradation of the reconstruction accuracy, as shown in Fig. 3a. The original thermal strain ε1 can be expressed by:
where ε2 represents the FBG sensor measurement strain and η represents the strain transfer coefficient.

Strain transfer and correction. a Strain transfer schematic; b STCC Flowchart
We propose a STCC based on an improved Genetic Algorithm (GA) [19] for solving the strain transfer coefficients to improve the reconstruction accuracy of the thermal deformation field. As an evolutionary algorithm, the genetic algorithm is known for its superior ability to search for global optimal solutions, its bio-inspired nature, and its adaptability. This makes it particularly well-suited for finding the strain transfer coefficient matrix of the global strain field, outperforming other evolutionary algorithms. The strain transfer coefficient matrix, optimized using the improved genetic algorithm, enhances the reconstruction performance at the current temperature and also improves accuracy at other temperatures.
The main steps are listed as follows: (1) Initializing the population and specifying the selection method, mutation probability, crossover probability, fitness evaluation function, and termination conditions. (2) The measured strain data and the population at a certain temperature are used in the reconstruction algorithm to calculate the thermal deformation field. (3) Adaptation evaluation. (4) Selection, crossover, and mutation. (5) Loop and iteration. (6) Meet the termination condition and output the optimal population. We can consider the optimal population as a matrix of strain transfer coefficients for the desired solution. (7) Bring the strain transfer coefficient matrix into other temperature strain fields for correction and complete the correction of strain transfer under each temperature field. The correction flow chart is shown in Fig. 3b.
3 Experimentation and analysis
3.1 Simulation verification based on finite elements
In this paper, we conduct a preliminary verification of the thermal deformation monitoring method through simulation and also discuss the deployment scheme of strain measurement points. First, the Representative Volume Elements (RVE) model is established using finite element software to represent the structural property parameters of CFRP laminate. The model is based on T700 carbon fiber and epoxy resin material parameters [20]. The model size is 600 mm × 600 mm × 1 mm, the fiber volume fraction is 50%, the fiber diameter is 7 μm, and the laminate is laid in eight layers from bottom to top, the thickness of a single layer is 0.125 mm, and the angle of the layers is [0/90/0/90]s. Table 1 shows the fundamental thermophysical parameters of T700 and epoxy resin.
Then, the thermal loading was applied to the center region of the CFRP laminate at 150 mm × 150 mm. The initial temperature is the same as the temperature of the room, which is 25 °C. Starting at 30 °C, the temperature was increased to a maximum of 100 °C in 10 °C increments. The simulation software generates the thermal strain and displacement fields of CFRP laminates. Finally, the simulated strain field data is imported into the reconstruction algorithm to calculate the displacement field. This is then compared with the displacement field simulated at the corresponding temperature.
However, in practical measurements, the number of strain measurement points that can be included in the element is limited due to the demand for satellite airborne lightweight. Therefore, the deployment of sensors in the element becomes a critical issue [21].
Therefore, we design the CFRP laminate with 16 elements, each element contains one strain sensing point, and the boundary condition of the model is fixed on all four sides. We design five sensing point bias schemes, which are sensing point bias 0 (no bias), 1/3, 2/3, 1/2, and sqrt (1/3) (Gaussian point). The bias mode closely matches the thermal loading in the central region. The element division scheme is shown in Fig. 4.

Element division and point layout
To evaluate the reconstruction errors of different sensing point layout schemes, we select the Maximum Absolute Error (δMAE), RMSE, and the ratio (e) of RMSE to maximum deformation. The calculation formulas are as follows:
where wiFEM is the reconstructed node displacement, wFEM is the simulated node displacement, N represents the number of elements, and zmax is the maximum node displacement. The results are shown in Fig. 5.

Results and errors of different sensor biases
As shown in this figure, the reconstruction errors of the scheme with sensing point bias 1/2 are relatively small overall the environments ranging from 30 °C to 100 °C. The reconstruction results are shown in Table 2. The maximum δMAE is 0.058 mm at 90℃, the maximum RMSE is 0.043 mm at 40℃, e is 3.3%, and the maximum e is 4.3% at 30℃. The results demonstrate that the reconstruction algorithm satisfies the accuracy requirements for in-orbit monitoring thermal deformation of remote sensing satellites.
3.2 Thermal strain characterization of CFRP
To further confirm the feasibility of the reconstruction algorithm, observing the strain of the CFRP laminate under an extreme temperature environment is an important initial step. Please refer to Sect. 3.1 for the structural design of CFRP laminates. To be easily put into the Temperature-controlled cabinet, the design structure size is 150 mm × 150 mm × 1 mm. Since the thickness of the CFRP laminate is 1 mm, it still satisfies the classical thin plate theory of the Kirchhoff hypothesis. This theory allows for the measurement of strain data on the top surface exclusively. The four sides of the CFRP laminate are fixed to the aluminum structural framework. Since it is difficult to accurately find the X and Y directions of the carbon fibers on the surface of the composite and to facilitate the experiment to carry out the measurement, we define a coordinate system with the endpoint of the lower left corner of the CFRP laminate as the origin, and the FBGs strain rosette is laid out in this coordinate system. Strain FBG sensors are laid out in their center position along the X-direction, Y-direction, XY-direction (along the X direction and Y direction angle is 45 degrees) and pasted on the surface of the composite laminate with adhesive (CC-33A). In addition, a temperature reference FBG sensor is placed in close proximity to the strain FBG sensors to decouple temperature effects.
Then, we must complete the strain sensitivity calibration by stretching the FBG axially and quantitatively with a precision displacement stage as shown in Fig. 6. In this paper, we stretch the FBG in units of 48.78 με and finally derive a strain sensitivity of 1.22 pm/με with an accuracy of 9.88 με In the subsequent experiments of thermal strain field characterization and thermal deformation monitoring, the sensitivity of strain calculation is set to 1.22 pm/με.

Strain sensitivity calibration system
The main steps of the thermal strain measurement of CFRP laminate are as follows: Place the CFRP laminates, fixed on all sides to the aluminum structural frame, into the Temperature-controlled cabinet, gradually increase the temperature from − 50 °C to 110 °C in steps of 10 °C, and record the center wavelength change of FBG. The data includes the wavelength drift of the four FBGs, and the entire process is repeated five times to minimize the impact of errors on the experiment. Using the strain calculations in Sect. 2.1, the change in strain in each direction is determined. The strain change amount of the thermal strain measurement system for CFRP laminated is shown in Fig. 7.

Characteristic thermal strain measurement system for CFRP laminates and isotropic thermal strain at different temperatures. a Thermal strain measurement system; b Anisotropic thermal strains with CC-33A; c Anisotropic thermal strains with DG-3S
Under CC-33A, in the temperature range of − 50 °C to 10 °C, the strain exhibits good linearity in all directions. However, beyond 10 °C, the strain experiences a slowdown in growth and a subsequent decrease, which is manifested as thermal contraction. This phenomenon is probably due to the decrease in the coefficient of thermal expansion caused by the vitrification of the epoxy resin in CFRP laminates and CC-33A [22]. The strain in the three directions is quite different from each other. Compared with the strain at − 50℃, at 110℃, the strain in the X-direction, Y-direction, and XY-direction increased by 346.5 με, 865.0 με, and 540.6 με, respectively. Compared to the strain in the X direction, the strain in the Y and XY directions increased by 518.5 με and 194.1 με, respectively. To avoid the influence of the adhesive on the measurement of the thermal strain characteristics, we conduct a comparison of the thermal strain characteristics of CFRP laminates using different adhesives (DG-3S). Under DG-3S, at 110 °C, the XY direction and Y direction increased by 79 με and 100 με, respectively, compared to the X direction. The figure demonstrates that the different adhesives lead to some differences in the thermal strain characteristics at different temperatures. These variations can be attributed to differences in adhesive parameters, surface mounting positions, and gluing processes. However, the figure clearly shows significant variations in the strain values in all three directions at all temperatures, regardless of the bonding agent employed. This phenomenon is related to the characteristics of CFRP laminate interlayer arrangement and thermodynamic parameters, which lead to the material's anisotropy. Therefore, it is crucial to measure the strain data in all three directions in order to reduce the reconstruction error.
3.3 Thermal deformation monitoring experiment and result analysis
A thermal deformation monitoring experimental system is utilized in this study. The system includes components, such as Fiber Optical Sensing (FOS), CFRP laminate, a thermostat (SUNNYPID, SLD70, 0.01 °C@(0–260)°C), laser displacement sensors (Panasonic, HG-C1030, 10 μm@10 mm), FBG multichannel demodulator (Xu Feng Photoelectric, C48U, ± 2 pm@ (1527–1568) nm), and a PC. The aluminum structural frame is utilized to support the entire experimental system and establish placement and boundary constraints for the CFRP laminates. The aluminum structural framework is securely attached to the optical platform, positioned at a significant distance from the thermal source. Moreover, the laser displacement sensors consistently operate within their designated operational temperature range. Consequently, when there is a change in temperature, the effects of both elements on the measurement outcomes can be ignored. Laser displacement sensors are set up to measure the displacement of the upper surface of a CFRP laminate. The CFRP laminate structure is identical to Sect. 3.1, with a structural dimension of 600 mm × 600 mm × 1 mm. The heating plate and Pt100 sensor (0.1℃@ (− 200–200)℃) wrapped by a sponge are pasted on the bottom of the CFRP laminate and connected to a thermostat for temperature readout and control. The CFRP laminate was divided into 16 elements. The FBG three-dimensional strain rosette and temperature reference grating are laid out on the upper surface, following the method described in Sect. 3.2, while ensuring that the sensing points are biased by 1/2. The FBGs strain rosette has a size of 15 mm × 15 mm and is inscribed on the optical fiber (Changfei, SMF-28e). The FBG’s center wavelength range is 1538–1560 nm, with a 6 mm grid area length. Figure 8 displays the system for monitoring thermal deformation and the deployment of the sensing network.

Thermal deformation monitoring system and sensing network deployment
The experimental steps are as follows: The room temperature is set at the standard laboratory temperature of 25 °C, and the heating plate is controlled by a thermostat to provide thermal loading to the CFRP laminate. The FBG center wavelength data of all sensing measurement points from 30 °C to 110 °C are collected in steps of 10 °C. The values of the laser displacement sensors are recorded at the corresponding temperatures. Since the laser displacement sensor has been in normal operation in this temperature range and the aluminum frame structure is far away from thermal loading, the effect of thermal loading on both of them can be safely ignored. The entire collection process is repeated five times. Then, the collected data is inputted into the reconstruction algorithm to decouple temperature and strain, allowing for the calculation of the thermal deformation field at the corresponding temperature.
Subsequently, the thermal strain data at 30 °C is brought into the STCC for strain data correction. First, 500 populations are initialized, and the probabilities of mutation and crossover are set to 0.05 and 0.8, respectively. Then, the number of iterations is set to 1000 to derive the optimal strain transfer coefficient matrix. Finally, the optimal strain transfer coefficient matrix is brought to other temperatures for correction. Errors before and after correction are shown in Fig. 9a, while the distribution cloud of the reconstructed displacement field after correction is shown in Fig. 9b. The error results can be found in Table 3.

Results of strain transfer coefficient correction. a Comparison of errors before and after strain transfer coefficient correction; b Reconstructed deformation field at different temperatures after correction
The results indicate a decrease in errors across all temperatures after correction by the STCC. Before adjusting the strain transfer coefficient, the maximum error occurred at 30 °C. This may be due to the limited deformation of the CFRP laminate at this temperature. The strain measurement of the sensor is more susceptible to the experimental environment, resulting in an RMSE of 0.005 mm, which corresponds to 19% of the maximum deformation. After adjusting for the strain transfer coefficient, the RMSE at 30 °C measures 0.002 mm, representing only 8.8% of the maximum deformation observed at that temperature. The RMSE at 110 °C is only 0.029 mm, which is only 3.3% of the maximum deformation. The reconstruction algorithm meets the accuracy requirements for spatial monitoring of thermal deformation fields.
4 Conclusions and discussion
This paper proposes a Temperature Self-Decoupling Thermal Deformation Monitoring (TSD-TDM) method based on fiber optical sensing (FOS) and the inverse Finite Element Method (iFEM) for remote sensing satellite phased array radar antennas. The technique is validated through simulation and experimentation. The method is characterized by temperature self-decoupling and can effectively measure and reconstruct the tiny strain field and displacement field of Carbon Fiber Reinforced Polymer (CFPR) laminates. In addition, this paper optimizes a sensing network layout for the loading distribution, improving the reconstruction accuracy of the sensing system by approximately 8% while maintaining the same number of sensors. Based on the error analysis of thermal deformation monitoring experiments, this paper also proposes a strain transfer coefficient correction algorithm to solve the phenomenon of inaccurate strain transfer, improving the effectiveness and accuracy of the monitoring method. In the simulation, the maximum ratio (e) of the root mean square error (RMSE) to the maximum displacement is 4.3%, and the maximum e of the experimentally reconstructed displacement field is 8.8% at 30 °C. The results meet the micro-deformation field's reconstruction requirements. The study provides a novel method to monitor the small thermal deformation of highly stable composite laminates in environments with large temperature variations.
It should be noted that the reconstruction algorithm’s grid division needs to be changed in accordance with changes in the structural dimensions, loading conditions, and monitoring point locations. It is necessary to adjust the layout of the measurement points or increase or decrease the number of sensing points in combination with the above conditions. Second, during the experimental process, except for the influence of the strain transfer coefficient, there will be a chirp phenomenon of the FBG sensor due to the influence of the binder by the thermal loading, and the shear strain is calculated rather than measured. All these will lead to some errors. Third, the STCC algorithm is an optimization algorithm for the full temperature range. In practical engineering applications, we are free to choose a more appropriate reference solution to correct the strain transfer coefficient matrix, as long as the binder is within its normal operating temperature range. Lastly, the measurement accuracy of conventional FBG sensors is limited to the micrometer range, making it impossible to measure small deformations (deformations are generally at the nanometer level) in highly stable support structures on remote sensing satellites. In future, we will carry out flight experiments together with the China Academy of Space Technology (CAST) to validate the methodology proposed in this paper. In addition, we will also conduct research on nanoscale precision fiber optic sensing system design, ultra-high-precision fiber optic monitoring network design, and the optimization of the number and methods of sensor deployment.
Data availability
The datasets generated and analyzed during the current study are available from the corresponding author on reasonable request.
References
Y. Xu, B. Cao, R. Deng, B. Cao, H. Liu, J. Li, Int. J. Appl. Earth Observation Geoinform. 119, 103308 (2023)
P. Muthukumar, K. Nagrecha, D. Comer, C.F. Calvert, N. Amini, J. Holm, M. Pourhomayoun, Atmosphere (Basel) 13, 822 (2022)
Q. Wang, S. Wang, and X. Deng, J. Environ. Prot. Ecol. 23, (2022)
X. Tang, J. Xie, Int J Digit Earth 5, 228 (2012)
Q.B. Zhou, Q.Y. Yu, J. Liu, W.B. Wu, H.J. Tang, J. Integr. Agric. 16, 242–261 (2017)
D. Li, M. Wang, J. Jiang, Geo-Spatial Inform. Sci. 24, 85–94 (2021)
F.N. Cogswell, Thermoplastic aromatic polymer composite (Elsevier, 1992)
F. Abdullah, K.I. Okuyama, I. Fajardo, N. Urakami, Aerospace 7, 35 (2020)
A.M. Zhang, Y.F. Zhang, J.Y. Liao, Y.P. Xu, Y.S. Wang, W.B. Luo, Y.P. Zhou, Z.Y. Qian, X.B. Li, F.J. Lu, S.N. Zhang, L.M. Song, C.Z. Liu, F. Zhang, J.Y. Nie, J. Wang, S. Yang, T. Zhang, X.J. Liu, R.J. Wang, X.F. Li, Y.F. Zhang, Z.W. Li, X.F. Lu, H. Xu, D. Wu, Radiat. Detect. Technol. Methods 7, 337–349 (2023)
F. A. Harrison, F. E. Christensen, W. Craig, C. Hailey, W. Baumgartner, C. M. H. Chen, J. Chonko, W. R. Cook, J. Koglin, K. K. Madsen, M. Pivavoroff, S. Boggs, and D. Smith, Exp Astron (Dordr) 20, (2005)
H. Dong, T. Yang, and H. Ren, Experimental Analysis of the Thermal Deformation of a Satellite Antenna Single Module. In: Duan, B., Umeda, K., Kim, Cw. (eds) Proceedings of the Eighth Asia International Symp[4]osium on Mechatronics. Lecture Notes in Electrical Engineering, vol 885. Springer, Singapore, (2022). https://doi.org/10.1007/978-981-19-1309-9_27
E. Haddad, R. Kruzelecky, J. Zou, B. Wong, W. Jamroz, F. Sayeed, J.M. Muylaert, I. McKenzie, European space agency (Special Publication, 2009)
G. Luyckx, W. De Waele, J. Degrieck, W. Van Paepegem, J. Vlekken, S. Vandamme, K. Chah, Insight: Non-Destr. Testing Cond. Monit. 49, 10–16 (2007)
H. Cheng, J. Chang, Y. Sun, J. Zhang, X. Wang, J. Therm. Stresses 42, 416 (2019)
A. Tessler, T.J.R. Hughes, A three-node mindlin plate element with improved transverse sheAR. Comput. Methods Appl. Mech. Eng. 50, 71–101 (1985)
A. Kefal, E. Oterkus, A. Tessler, J.L. Spangler, Eng. Sci. Technol., Int. J. 19, 1299 (2016)
K. Zhou, L. Zhu, G. Sun, Y. He, Appl. Phys. B 129, 140 (2023)
E.J. Friebele, C.G. Askins, A.B. Bosse, A.D. Kersey, H.J. Patrick, W.R. Pogue, M.A. Putnam, W.R. Simon, F.A. Tasker, W.S. Vincent, S.T. Vohra, Smart Mater. Struct. 8, 813 (1999)
S. Katoch, S.S. Chauhan, V. Kumar, Multimed. Tools Appl. 80, 8091–8126 (2021)
Y. Pan, L. Iorga, A.A. Pelegri, Compos. Sci. Technol. 68, 2792–2798 (2008)
M.A. Abdollahzadeh, A. Kefal, M. Yildiz, Sensors (Switzerland) 20, 1 (2020)
M. Mohamed, M. Johnson, F. Taheri, Open J. Comp. Mater. 09, 145 (2019)
J. K. Sahota, N. Gupta, and D. Dhawan, Opt. Eng. 59, (2020)
Acknowledgements
This work was supported by the National Natural Science Foundation of China (No.52375524).
Funding
Funding was provided by the National Natural Science Foundation of China (No.52375524).
Author information
Authors and Affiliations
Contributions
Investigation, SY; Methodology, SY, GS; Writing—original draft, SY; Supervision, LZ, KY; Writing—review and editing, GS, KY, and LZ. All authors have read and agreed to the published version of the manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no competing interests.
Ethical approval
This article does not contain any studies involving human participants performed by any of the authors.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Yuan, S., Sun, G., Yu, K. et al. In-orbit thermal deformation monitoring for composite laminated structures of remote sensing satellites using temperature self-decoupling fiber optical system and inverse finite element method. Appl. Phys. B 130, 45 (2024). https://doi.org/10.1007/s00340-024-08180-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00340-024-08180-6