
Abstract
This article presents a method to determine the magnetic field distribution within the vapor cell of a spin-exchange relaxation-free (SERF) atomic magnetometer with a sensitivity of the order of 10 femtoTesla and a bandwidth of DC to 100 Hz, in the presence of an uncompensated ambient magnetic field of up to several nanoTesla. The method is based on the analysis of the atomic polarization in a multichannel pump–probe configuration, in which a spatially selective optical pumping enables to probe specific layers of the atomic vapor contained in a gas-buffered cell. An SERF magnetometer is inherently sensitive to one component of the magnetic field, orthogonal to the pump and probe laser beams. The sensor’s performance can be drastically degraded by the other uncompensated components of the magnetic field. Typically, SERF magnetometry requires very good magnetic shielding and active compensation of residual magnetic field to properly function; this is commonly achieved by applying a complex design of Helmholtz coils in a sophisticated compensation procedure. The method suggested in this article eliminates the influence of non-uniform residual magnetic fields on the accuracy of measurements without precise compensation of the interfering field components. This procedure is used to simplify the measurements of magnetic field distribution in a large vapor cell with required accuracy. This is critically important for precise multichannel magnetic field mapping used for localization of the magnetic dipole-field source.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
One of the most sensitive magnetometers available today is the spin-exchange relaxation-free (SERF) magnetometer [1,2,3]. These devices are based on measuring the spin precession of alkali atoms in low magnetic field (less than several nT) and high atomic vapor density (1012–1014 cm− 3) [4]. The localization of extra-weak magnetic field sources is an extremely important problem today. For example, noninvasive functional brain imaging methods such as EEG and MEG allow extra-cranial recordings of neural cell magneto-electric activity [5, 6]. The precise localization of current source distribution inside the brain (the inverse problem) allows functional study/imaging and diagnosis of diseases at the early stage. The existing optimization algorithms impose some restrictions on the area of confident localization. The resolution of the localization essentially depends on the coordinates of the measurement points relative to the source position. The minimum number of measurement points is defined by the quantity of unknown dipole parameters; however, the redundancy in the number of measurements provides fast and unambiguous convergence of the optimization. To achieve a magnetic field source localization, an accurate field distribution measurement is required.
Several techniques for mapping a magnetic field distribution with a single magnetometer sensor have been developed [7,8,9,10]. A resolution of 250 µm with 23 pT/√Hz sensor sensitivity has been demonstrated using a combination of cm-size SERF magnetometer and flux guides [11]. However, mechanical motion reduces the operation speed drastically and makes the method unusable for time-resolved recordings. These obstacles could be overcome using the arrays of magnetometers. In this case, spatial resolution depends on the sensor size and array configuration. Development of this method is hampered by the high cost of SERF detectors, and by the technical complexity of the method’s implementation. Several research groups have demonstrated the imaging of spatial magnetic field distribution with a single atomic vapor cell and a photodetector array [12, 13]. Dolgovskiy et al. [14] reported vector measurements of magnetic field distribution using ground-state Hanle resonances. They detected fluorescence emitted by a layer of spin-polarized Cs alkali atoms using a CCD camera. The atoms were contained at a room temperature in a cubic vapor cell with a buffer-gas mixture at ~ 50 mbar pressure. Each camera pixel recording can be interpreted as a signal of individual independent magnetometer, allowing high-resolution magnetic field mapping. The method resolves fields of 10 pT (for a 1 s acquisition time) range in a field of view up to 20 × 20 mm2. The authors used 130 × 130 µm2 of the fluorescence-emitting plane as a voxel (elementary measurement volume). Precision of the method disturbs by atomic diffusion that amounts to several millimeters for the experimental parameters.
One advantage of the SERF magnetometer under consideration is that the diffusion of the alkali atoms inside the vapor cell is significantly reduced due to high buffer-gas pressure (several atmospheres). An extremely high sensitivity threshold, better than 1 fT/√Hz per a 0.1 cm3 measurement volume of alkali atoms vapor, was achieved [15]. The high resolution of the SERF magnetometer allows one to use a very small volume (a few mm3) of the optically pumped atomic vapor as an extremely sensitive independent detector for mapping a magnetic field distribution. We demonstrated that the distribution of a magnetic field inside the vapor cell can be measured [13] by selectively pumping, layer by layer, the volume of the atomic vapor in the cell, and collecting the data from the expanded linearly polarized probe beam by a two-dimensional photodiode array (Fig. 1). Each element of the photodiode array collects the integrated signal describing the condition of the atoms in the volume of the voxel (elementary volume), formed by crossing the corresponding probe and pump beam. Operation in the SERF regime requires careful compensation of all three components of the magnetic field. It is relatively simple to compensate magnetic fields at a single point, but complete compensation of the interfering fields and gradients, especially in a large volume of a vapor cell, is a complex technical problem requiring many compensating coils with precision current control [16, 17]. Insufficient compensation of orthogonal components of an ambient magnetic field can make determination of magnetic field distribution in the vapor cell unreliable or altogether impossible. This limitation of three-dimension (3D) magnetic field imaging essentially decreases the usable area of the large single-cell SERF magnetometers.

Measurements of magnetic field distribution with a single-cell SERF magnetometer [5]
We suggest a method to measure magnetic field distribution in a partially compensated ambient magnetic field, taking into account the influence of the uncompensated magnetic field on the result.
2 Methodology
A common SERF magnetometer uses a probe laser beam orthogonal to the pump beam with the pumping axis defined as z in Fig. 2. The magnetometry method is to measure the rotation angle of the linear polarization of the probe beam went through the polarized atomic vapor [18].

Magnetic field mapping SERF magnetometer set-up
The rotation angle (φ) is proportional to the projection of the atomic polarization (Px) on the direction of the probe laser beam.
The spin polarization P of the atoms resulting from the pump beam in the presence of a magnetic field B can be well described by a Bloch equation [19]:
where γ is the gyromagnetic ratio of the atom (γ ≈ 2π(0.7 MHz/G) for potassium atoms with the nuclear spin quantum number I = 3/2), s is the optical pumping vector, with a magnitude equal to the degree of circular polarization, q is the slowing-down factor due to a nuclear spin, ROP is the optical pumping rate, and ∑Γ is the sum of all the spin destruction rates. The values of the nuclear slowing-down factor q as a function of spin polarization were found by Appelt et al. [20] and varies from 6 to 4 for the potassium atoms, used in our SERF magnetometer. Effects of diffusion can be neglected for our configuration.
A steady-state solution of the Bloch equation (1) can be used to characterize the dynamics of spins and the atomic polarization projection as follows [21,22,23]:
where:
P0 is the equilibrium atomic polarization and K = (ROP + ΣΓ)/γ is a constant for given experimental conditions. Using K as a scaling factor allows us to describe the magnetometer signal as a function of non-dimensional parameters defined by the following:
Hence, the magnetometer signal S can be expressed as follows:
where G is the total conversion coefficient of the system from φ to the output signal. The total gain G is a magnetometer constant for the fixed experimental parameters.
Thus, it is evident that the signal of the magnetometer has a nonlinear dependence on the magnetic field components. The magnetometer signal’s dependence on the magnetic field at zero bx and bz values is shown in Fig. 3. The magnetometer signal (solid line) is nonlinear; non-zero bx and bz coefficients lead to deformation and offset of the signal curve (dashed line).

Theoretical response of SERF magnetometer to a magnetic field applied in the y-direction, with compensation for orthogonal components (bx = bz = 0, blue solid line); with non-zero values of orthogonal components (bx = 1, bz = − 0.5, magenta-dashed line)
The main operation mode of the SERF magnetometer, described in most studies, is a regime where the orthogonal components Bx and Bz of the measured magnetic field are close to zero and the device is sensitive to the By component only. We consider here a more practical case when the range of SERF magnetometer operation can be expanded considerably if the required compensation is technically unjustified and a rough estimation of the measured magnetic field range is possible.
The fundamental sensitivity of the SERF magnetometer is limited by spin-projection noise and photon shot noise [24]. This limit can be optimized by adjusting the atomic spin polarization P0 in the cell. Seltzer [25] showed that, at the optimal polarization value, P0 = 0.5, the fundamental sensitivity of the magnetometer, limited by spin-projection noise, can theoretically reach 0.012 fT/√Hz for a 1 cm3 voxel volume. However, up-to-date magnetometer sensitivity is limited to several fT/√Hz because of the noise caused by the magnetic shields, even when optimal polarization is attained in the vapor cell [26]. Here, we consider a magnetometer operation mode, where the pumping rate is not so high as to cause the atomic polarization saturation and the magnetometer signal reduction.
The slope of the magnetometer signal curve (Gr = ∂S/∂By) is defined by the pumping rate and the optimal scaling factor, which can be adjusted easily by modifying pumping beam parameters. The precision and resolution of the magnetometer rise as the slope increases. Precise magnetic field measurements by an SERF magnetometer require two conditions to be fulfilled. The first one is a sufficiently strong signal. To achieve a sufficient magnetometer signal value, an optimal value of the pumping rate ROP is defined at the range where both the product of the signal value and its derivative are maximal:
The second condition is a vector response. The SERF magnetometer works as a vector instrument if the signal obtained from an arbitrarily oriented magnetic field is proportional to the By component only and the values of Bx and Bz components do not influence the result of the measurements. Analysis of Eq. (5) gives a range of magnetic field measurements, where the magnetometer works as a vector device, with required accuracy. One can set a criterion for the required accuracy:
It is known [27], that an arbitrarily oriented dipole produces a complex magnetic field structure, which can be modeled by a current induction coil. At a certain measurement point, the transverse components Bx and Bz of the magnetic field may have a considerable magnitude. We use the parameter V = maximum (Bx/By and Bz/By) to set the conditions and range of the various components of the magnetic field. For example, V < 1 defines the region of measured magnetic fields where the orthogonal components Bx and Bz do not exceed the value of the By component to be measured.
Solution of Eq. 6 gives the optimum pumping rate value ROP ≈ ΣΓ for the measured magnetic field By, when influence of the orthogonal components (Bx and Bz) is insignificant. This result is in a good agreement with the optimal magnetometer operation regime at P0 = 0.5 required for the spin-projection noise suppression [25]. To keep δ in the required limit when the vector of magnetic field deviates from the y-direction, the pumping rate should be increased, and hence, the scaled value of magnetic field by will decrease, resulting in a lower magnetometer signal. Higher pumping rates decrease the corresponding error, but also reduce a useful signal. Figure 4 presents the dependence of optimal pumping rate on the measured value By for fixed values of the required accuracy δ. For example, if the By component to be measured is 500 pT, the Bx and Bz components are not exceeded By (V = 1) and the error due to the influence caused by Bx and Bz must be less than 1%. In this case, the pumping rate required is 2192 s− 1 (ΣΓ ≈ 50 s− 1 for the SERF configuration). We should note again here that the higher pumping rate is limited, because the atomic polarization for greater pump intensities has a more complex behavior; whereas a low pumping rate results in a higher level of the useful signal, it reduces the magnetometer’s response speed and signal-to-noise ratio.

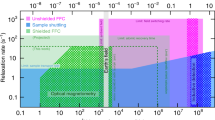
Optimal values of the pumping rate ROP and scaling factor K have been calculated for δ = 0.01–0.1 and V = 1–20. The dependence of the optimal scaled value of the magnetic field, by, on the relative value of V for the chosen value of δ is presented in Fig. 5. For the common experimental parameters, the dependence can be approximated using the expression:

Dependence of optimal scaled value of magnetic field by on the relative value of V = max (Bx/By, Bz/By) for δ < 1%, 5%, and 10%. The analysis was made for By values changed from 100 fT to 1.5 nT
The corresponding by optimal scaling factor K for the corresponding range of magnetic field By can be readily calculated by the following:
The main magnetometer constants are determined during the calibration procedure that should be performed to assure accurate measurements with low compensation of the residual magnetic field.
3 Determination of the magnetometer constants and the calibration procedure
As depicted by Eq. (5), the magnetometer signal is not proportional directly to the magnetic field to be measured; therefore, mathematical signal processing is required. The most accurate results may be obtained in terms of a function of all the parameters:
It must be kept in mind that the measured By is the sum of the y-component of the magnetic field to be measured and the uncompensated external magnetic field. Hence:
where BY is the y-component of magnetic field to be measured, and BY0 is the y-component of uncompensated external magnetic field.
3.1 Determination of the magnetometer constants
Values of K and G are obtained from experimental data. The following procedure is suggested:
-
1.
Magnetic field is compensated at a central point of the studied pumping layer.
-
2.
The magnetometer responses on a number of reference magnetic fields applied in the y-direction by a set of Helmholtz coils are recorded.
-
3.
The procedures 1 and 2 are repeated for each pumping layer.
-
4.
The values of G and K for best fit of readings of the magnetometer signals and theoretical signal values, calculated using Eqs. (4) and (5), are obtained for each pumping layer.
3.2 Calibration procedure
The calibration is analogues to the magnetometer constant determination procedure. The magnetometer signal depends on the values of uncompensated magnetic fields Bx, BY0, and Bz. Hence, the influence of uncompensated magnetic fields should be determined and taken into account at signal processing before actual magnetic fields measurements.
The calibration procedure is:
-
An external magnetic field is compensated at a central point of the vapor cell only. In some cases, when external magnetic fields are essentially less than the field to be measured, compensation is not required.
-
The magnetometer responses on a number of reference magnetic fields in the range of measurements applied by a set of Helmholtz coils are recorded for each measurement point (voxel).
-
The values of Bx, BY0, and Bz for best fit of readings of the magnetometer signals and theoretical signal values are calculated using Eqs. (4) and (5) for each voxel.
After calibration, the actual values of unknown magnetic fields can be measured. Because of the symmetry between Bx and Bz in Eq. (2), their actual values cannot be determined. Instead of Bx and Bz, B1 and B2 influences, which have the same effect on the magnetometer signal, can be considered. The magnetic field at each voxel is calculated using the values of magnetometer readings substituted in Eq. (5), where G is the magnetometer constant and the values of B1, B2, and BY0 were obtained for each voxel during the calibration procedure.
3.3 Experimental determination of the magnetic field
We use the experimental set-up for 3D magnetic field measurements in a single SERF atomic magnetometer cell described in [13] and depicted in Fig. 2. A 4 cm cubic potassium vapor cell contains 2.52 amagat of 4He as a buffer gas and 52 torr N2 for potassium collision quenching. The cell was warmed to 180 °C in a small hot-air oven mounted in the center of a five-layer cylindrical magnetic shield with a shielding factor of about 104. This geometrical arrangement and the high pressure of the buffer gas, ensure a diffusion coefficient of 0.026 cm2/s of potassium atoms. This results in a 0.5 mm diffusion length per measurement cycle of 0.1 s, and sensitivity of 20 fT/√Hz. The residual magnetic field of several nT was further reduced by three pairs of compensation Helmholtz coils. The simple coil set is not capable of compensating an external magnetic field in the entire cell volume, and often leaves a residual field higher than the magnetic field to be measured. The coils radius is 0.135 m. The magnetic field is compensated at the midpoint between the coils. The deviation of the magnetic field at 2 cm from the midpoint results in the presence of uncompensated field of several pT in the displaced voxels, and can lead to unreliable measurements of an unknown magnetic field. The magnetic field gradient caused by the uncompensated residual magnetic field and the nonuniformity of the compensation coils can be compensated using additional sets of gradient coils. However, the calibration and signal processing procedures suggested here allow precise magnetic field measurement in all the cell volume without additional modifications of the magnetometer set-up.
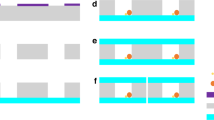
The cell is illuminated with a circularly polarized pump laser beam tuned to the center of the potassium D1 line at 770 nm. The x–component of the atomic polarization probes with the linearly polarized “probe” laser detuned by 0.8 nm from the D1 line to avoid additional pumping of the atoms in the x-direction. For the sake of simplicity, we will consider a cell containing three pumping layers at a distance of 10 mm from each other (Fig. 6). Pumping of successive layers can be attained using a custom-designed chopper disk with arc-shaped slots of various radii (Fig. 7). Thus, disk rotation provides consecutive pumping of the cell, layer by layer. Controlling the rotation speed allows the pumping time of each layer to be adjusted. To reduce the shutting/opening transient time, the chopper is placed in the focal plane of a pump beam Kepler type collimator. Multichannel operation is performed by collecting data from the expanded probe beam with a two-dimensional Hamamatsu S7585 photodiode array as a detector. The imaging frame rate is determined mostly by the buildup time for the polarization (~ 10 ms) and the pump layers are switched according to the decay time constant (~ 100 ms) [13, 28].

Voxel array used for the magnetic field measurement

Chopper design, enabling successive pumping of the vapor cell
Figure 8 displays the results of the magnetometer signal measurements as a function of the applied reference magnetic fields in the y-direction for the voxels L1, L2, and L3 of one probe channel (Fig. 6). The graph shows that the theoretical curve fits the experimental data very well. Table 1 presents the magnetometer constants, determined for each pumping layer of the magnetometer.

The theoretical signal values and measurements of the magnetometer signal, for three voxels, formed by crossing the corresponding pump and probe beam (Fig. 6)
To simulate the ideal dipole field, a cylindrical induction coil with optimized geometry was used [27]. A small modulated magnetic field was produced by ten turns of a 6 mm-diameter single layer coil placed 65 mm from the center of the vapor cell along the y-axis (Fig. 6).
The distribution of the magnetic field inside a vapor cell was investigated. Figure 9 presents the obtained results for the array of nine voxels. The graph shows that, in spite of essential nonlinearity, the experimental and theoretical data are very similar. The calculations show a good agreement with the theoretical values of applied magnetic fields. For example, the coefficient of multivariable correlation is R2 = 0.972 and the standard deviation is σ = 0.012 nT for the layer 2 voxels. The measurement error for the first pumping layer (R2 = 0.815, σ = 0.027 nT) is higher due to insufficient pumping rate.

Results of the on-axis dipole-field mapping. Measurements at nine sites within the cell are shown. The thick black curves show the calculated values of the dipole-field at the centers of the corresponding voxels
4 Conclusion
This article analyzes a new approach allowing mapping the magnetic field with a single SERF vapor cell in several locations simultaneously. Signal processing for multichannel operation of the SERF magnetometer has been analyzed. An original technique of multichannel magnetometer calibration has been suggested. A new algorithm for signal processing taking into consideration the influence of uncompensated residual magnetic fields has been developed and applied. We have demonstrated a methodology for accuracy improvement of the measurements of a magnetic field distribution by a large active volume SERF magnetometer in the presence of residual magnetic fields. The special resolution achieved provides magnetic field gradient data that can be used for common mode noise rejection calculations. The signal processing procedure allows to simplify the magnetometer design by eliminating gradient coils and to conduct precise 3D measurements of magnetic field in a partially compensated magnetic field environment. The simultaneous multilocation magnetic field distribution measurement enables a better localization of unknown magnetic sources.
References
J.C. Allred, R.N. Lyman, T.W. Kornack, M.V. Romalis, High-sensitivity atomic magnetometer unaffected by spin-exchange relaxation. Phys. Rev. Lett. 89, 130801–130802 (2002)
J.-H. Liu, D.-Y. Jing, L.-L. Wang, Y. Li, W. Quan, J.-C. Fang, W.-M. Liu, The polarization and the fundamental sensitivity of 39K (133Cs)-85Rb-4He hybrid optical pumping spin exchange relaxation free atomic magnetometers. Nat. Sci. Rep. 7:6776 (2017)
J. Lu, Z. Qian, J. Fang, W. Quan, Effects of AC magnetic field on spin-exchange relaxation of atomic magnetometer. Appl. Phys. B 122, 59 (2016)
A. Grosz, M.C. Haji-Sheikh, S.C. Mukhopadayay, High Sensitivity Magnetometers (Springer, New York, 2016), pp. 451–491
K. Wendel, O. Väisänen, J. Malmivuo, N.G. Gencer, B. Vanrumste, P. Durka, R. Magjarević, S. Supek, M.L. Pascu, H. Fontenelle, R.G. de Peralta Menendez, EEG/MEG source imaging: methods, challenges, and open issues. Comput. Intell. Neurosci. 2009, 656092 (2009)
T. Hedrich, G. Pellegrino, E. Kobayashi, M. Lina, C. Grova, Comparison of the spatial resolution of source imaging techniques in high-density EEG and MEG. NeuroImage 157:531–544 (2017)
A. Horsley, G.-X. Du, P. Treutlein, Widefield microwave imaging in alkali vapor cells with sub-100 µm resolution. N. J. Phys. 17, 112002 (2015)
Y.J. Kim, I. Savukov, J.-H. Huang, P. Nath, Magnetic microscopic imaging with an optically pumped magnetometer and flux guides. Appl. Phys. Lett. 110, 043702 (2017)
K. Nishi, Y. Ito, T. Kobayashi, High-sensitivity multi-channel probe beam detector towards MEG measurements of small animals with an optically pumped K-Rb hybrid magnetometer. Opt. Express 26(2), 1988–1996 (2018)
A. Gusarov, A. Ben-Amar Baranga, D. Levron, R. Shuker, Accuracy enhancement of magnetic field distribution measurements within a large cell spin-exchange relaxation-free magnetometer. IOP Measure. Sci. Technol. 29, 045209 (2018)
Y.J. Kim, I. Savukov, Ultra-sensitive magnetic microscopy with an optically pumped magnetometer. Sci. Rep. 6, 24773 (2016)
Y. Ito, D. Sato, K. Kamada, T. Kobayashi, Measurements of magnetic field distributions with an optically pumped K-Rb hybrid atomic magnetometer. IEEE Trans. Magn. 50, 4006903 (2014)
A. Gusarov, D. Levron, E. Paperno, R. Shuker, A. Ben-Amar Baranga, Three-dimensional magnetic field measurements in a single SERF atomic-magnetometer cell. IEEE Trans. Magn. 45, 4478 (2009)
V. Dolgovskiy, I. Fescenko, N. Sekiguchi, S. Colombo, V. Lebedev, J. Zhang, A. Weis, A magnetic source imaging camera. Appl. Phys. Lett. 109, 023505 (2016)
T. Wang et al., Application of spin-exchange relaxation-free magnetometry to the cosmic axion spin precession experiment. Phys. Dark Univ. 19, 27–35 (2018)
H. Xia, A. Ben-Amar Baranga, D. Hoffman, M.V. Romalis, Magnetoencephalography with an atomic magnetometer. Appl. Phys. Lett. 89(21), 211104 (2006)
E. Breschi, Z. Grujić, A. Weis, In situ calibration of magnetic field coils using free-induction decay of atomic alignment. Appl. Phys. B 115(1), 85–91 (2014)
D. Budker, D.F. Jackson Kimball, Optical Magnetometry (Cambridge University Press, Cambridge, 2013)
F. Bloch, Nuclear induction. Phys. Rev. 70, 460 (1946)
S. Appelt, A. Ben-Amar Baranga, C.J. Erickson, M.V. Romalis, A.R. Young, W. Happer, Theory of spin-exchange optical pumping of 3He and 129Xe. Phys. Rev. A58, 1412 (1998)
M.P. Ledbetter, I.M. Savukov, V.M. Acosta, D. Budker, M.V. Romalis, Spin-exchange-relaxation-free magnetometry with Cs vapor. Phys. Rev. A 77, 033408 (2008)
I. Savukov, Ultra-Sensitive Optical Atomic Magnetometers and Their Applications (INTECH Open Access Publisher, London, 2010)
I.M. Savukov, S.J. Seltzer, M.V. Romalis, K.L. Sauer, Tunable atomic magnetometer for detection of radio-frequency magnetic fields. Phys. Rev. Lett. 95, 063004 (2005)
V. Schultze, R. IJsselsteijn, H.-G. Meyer, Noise reduction in optically pumped magnetometer assemblies. Appl. Phys. B 100(4), 717–724 (2010)
S.J. Seltzer. Developments in Alkali-Metal Atomic Magnetometry, Dissertation, Princeton University, 2008
S.J. Seltzer, M.V. Romalis, High-temperature alkali vapor cells with antirelaxation surface coatings. J. Appl. Phys. 106, 114905 (2009)
E. Paperno, A. Plotkin, Cylindrical induction coil to accurately imitate the ideal magnetic dipole. Sens. Actuat. A 112, 248–252 (2004)
A. Gusarov, D. Levron, A. Ben-Amar Baranga, E. Paperno, R. Shuker, An all-optical scalar and vector spin-exchange relaxation-free magnetometer employing on–off pump modulation. J. Appl. Phys. 109, 07E507 (2011)
Acknowledgements
The authors would like to thank Alexander Papkov from The Dead-Sea and Arava Science Center for the valuable practical discussions in the early stages of this research.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Gusarov, A., Baranga, A.BA., Levron, D. et al. Measurement of the spatial magnetic field distribution in a single large spin-exchange relaxation-free vapor cell. Appl. Phys. B 125, 19 (2019). https://doi.org/10.1007/s00340-018-7130-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00340-018-7130-7