
Abstract
Lidar is an effective remote sensing method for obtaining the optical properties of aerosols, such as the aerosol extinction coefficient (AEC), the aerosol optical depth (AOD), and the related atmospheric visibility. However, improving the accuracy and efficiency of lidar data retrieval remains challenging due to the uncertainties associated in determining the AEC boundary value (AEC-BV) and the aerosol extinction-to-backscatter ratio (AEBR), as well as the complex and time-consuming calculations required. In this paper, we propose a novel method, a feedback radial basis function (RBF-FB), for retrieving high-precision AEC profiles based on a radial basis function neural network. First, using the secant method, we determine accurate values for AEC-BV and AEBR, and generate the AEC profiles by the Fernald method. We then choose a set of lidar signals and their corresponding AEC profiles as learning samples for network training and establish an RBF network model for AEC retrieval. Next, we correct the network output by introducing a feedback mechanism that uses the AOD measured by a sun photometer as the error criterion. Tests on measured signals confirm that the outputs of the proposed RBF-FB model are consistent with the Fernald method and have the advantages of speed and robustness.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Aerosols play an important role in the atmospheric system and water circulation by affecting the radiation in the atmosphere, atmospheric chemistry and the process of cloud development and precipitation [1,2,3]. Highly accurate determinations of aerosol optical properties are helpful in improving our overall understanding of aerosols, and they are particularly significant in the study of climate change and environmental prediction [4]. For instance, the aerosol extinction coefficient (AEC), aerosol optical depth (AOD) and related visibility data are essential factors in meteorology research [5]. The lidar method has proved effective in characterizing the optical properties of atmospheric aerosols as well as their spatial and temporal distributions [6]. By adjusting the emission angle of the laser beam, lidar can achieve horizontal, vertical and slant aerosol measurements. However, due to limitations in the efficiency of the inversion algorithm and the noise associated with electrical fluctuations and stray light, the detection range and accuracy of lidar remain limited [7].
In recent decades, a lot of work has been conducted to develop an accurate inversion model based on lidar equations. For Mie-scattering lidar data, the inversion of AEC is traditionally realized by procedures such as the Collis method [8] and exponential curve fitting [9]. Although these methods are simple and robust in the absence of any prior relation assumptions, they can only be applied to a homogeneous atmosphere [10]. With respect to an inhomogeneous atmosphere, a constitutive relation is needed to accurately solve lidar equations. Klett proposed a one-component fitting method, in which a power exponential relationship was assumed between the backscattering and extinction coefficients [11]. Although the inhomogeneity of the atmosphere is considered in this approach, light scattering effects from the atmospheric molecules are not included. However, when aerosols in the atmosphere do not dominate, light scattering from both aerosols and atmospheric molecules must be taken into account. Given the above considerations, Fernald proposed the two-component fitting method, which is also applicable to a mildly turbid atmosphere [12]. This approach is regarded as a classical inversion method and is widely used today.
Despite Fernald’s contributions, there are two major error sources in the inversion: the aerosol extinction coefficient boundary value (AEC-BV) and the aerosol extinction-to-backscatter ratio (AEBR) [13, 14]. Accurate retrieval of the AEC requires the determination of these two key parameters. However, these values are typically chosen based on experience, which inevitably leads to errors in the final inversion results [15,16,17,18]. In general, when the lidar detection height is very high, the reference height can be set above the tropopause, where the selection of the AEC-BV can be treated as an ideal condition. However, when the detection range is lower than the tropopause, the determination of the AEC-BV becomes more complicated due to the strong background noise, the weak echo signal and the intense absorption layer that may exist in the detection channel. As a result, most research has focused on the determination of the AEC-BV at low altitudes. For example, the slope method (i.e., one-component fitting) was proposed to fit the boundary value for a homogeneous atmosphere [12, 19]. In addition, by introducing information about a horizontal lidar signal, the AEC-BV in a slant lidar signal can be determined, which is favourable for lidar scanning observations [20]. Moreover, an iterative method was proposed for deriving the AEC-BV by repeatedly correcting the range-corrected signal with a range-dependent phase function; however, the variation of the phase function is hard to control in this method [21]. The determination of the AEBR is also an important and hot research topic. For elastic backscatter lidar, the AEBR can be deduced from the echo signal and supplemented by other measurements, such as sun photometry and the optical particle count [22]. AEBR can also be determined directly by measuring the aerosol extinction and backscatter coefficients simultaneously with other lidar observation techniques, such as Raman-elastic backscatter lidar [23], high spectral resolution lidar (HSRL) [24] and two counter-looking lidar (TCL) [25]. However, some technical problems have emerged. For instance, the Raman method is generally limited to night time measurements due to the weakness of Raman backscatter signals, HSRL is complicated to build and use, and TCL is very sensitive to signal noise and requires the simultaneous combination of counter-propagating elastic signals [26].
In this study, we developed a novel feedback radial basis function network, RBF-FB, for the efficient retrieval of the AEC. Using the secant method, we accurately determine the AEC-BV and AEBR and then use the Fernald method to obtain the AEC profiles. We then choose a set of lidar signals and their corresponding AEC profiles as learning samples for network training and establish an RBF network model. Then, we further correct the RBF network output by introducing a feedback mechanism that uses the AOD measured by a sun photometer as the error criterion. Our simulation results validate both the feasibility of our proposed method and the significant improvements realized in the inversion accuracy and efficiency.
2 Principle and method
2.1 Basic principle of AEC inversion
When lidar is used for atmospheric observation, the received power of the backscattered signal at range r can be described by the following single-scattering lidar equation [5, 27]:
where P0 represents the lidar emission power, C is the lidar system constant, and η denotes the overlap factor. \({T_{\text{a}}}\left( r \right)=\exp \left[ { - \int_{0}^{r} {{\alpha _{\text{a}}}} (r){\text{d}}r} \right]\) is the aerosol transmission rate and \({T_{\text{m}}}(r)=\exp \left[ { - \int_{0}^{r} {{\alpha _{\text{m}}}(r){\text{d}}r} } \right]\) is the molecular transmission rate, in which αa(r) and αm(r) indicate the aerosol and molecular extinction coefficients, respectively. βa(r) and βm(r) are the aerosol backscattering coefficient and the atmospheric molecular backscatter coefficient, respectively. Equation (1) can be solved by numerical integration, and in this study, we selected the backward integral solution for retrieving AEC because of its stability [28]; the solution is given as follows:
where X(r) = P(r) × r2 is the range-corrected signal [29]. Sm, αm−BV and Sa, αa−BV are the extinction-to-backscatter ratios and the extinction coefficient boundary values for the atmospheric molecules and aerosols, respectively. If the initial conditions (Sm, αm−BV and Sa, αa−BV) at the reference height rm are available, the AEC profile can be obtained by the numerical solution of Eq. (2). In general, αm−BV is calculated using the US standard atmospheric model and Sm = 8π/3. However, the parameter values for AEBR (Sa) and AEC-BV (αa−BV) are usually chosen based on experience; this leads to errors in the final inversion results. To improve the inversion accuracy, more appropriate methods for determining AEBR and AEC-BV are needed.
2.2 Determination of AEBR
Previous studies show that the value of AEBR varies from 20 to 100 sr, and depends on the size distribution and complex refractive index of the aerosols [6, 28]. The inaccurate assumption of AEBR can lead to large errors in the AEC inversion, and this problem is particularly serious under inhomogeneous atmospheric conditions where the aerosol-to-molecular extinction ratio varies greatly [6, 30]. Hence, AEBR must be estimated carefully using a suitable method [31]. Here, we propose a secant method for determining AEBR by the synthetic utilization of lidar and sun photometer measurement results.
For lidar observations, the AOD can be calculated by the integral of the AEC along the optical path from 0 to ra and can be expressed as follows [28, 32, 33]:
The AOD can also be obtained by subtracting the optical depth of atmospheric molecules (MOD) from the total optical depth of the atmosphere (TOD), i.e., \({\text{AOD}}={\text{TOD}} - {\text{MOD}}\). TOD can be directly measured by a sun photometer, and the MOD can be calculated by integrating the extinction coefficient of atmospheric molecules in the effective detection range. These two methods for acquiring AOD are independent and can be mutually validated:
Using the secant method to solve Eq. (4), we can determine Sa and derive its iterative flow chart, as shown in Fig. 1, for which the entire numerical solution to the equation consists of four steps. Step 1 involves the establishment of the nonlinear equation \(g{\text{(}}{S_{\text{a}}}{\text{)}}={\text{AOD(}}{S_{\text{a}}}{\text{)}} - {\text{(TOD}} - {\text{MOD)}}\) for the determination of Sa; Step 2 involves the selection of initial iterative values for s−1 and s0 based on the convergence principle; Step 3 involves the generation of the iterative sequence {sk} according to the iterative formula\({s_{k+1}}={s_k} - \frac{{g\left( {{s_k}} \right)}}{{g\left( {{s_k}} \right) - g\left( {{s_{k - 1}}} \right)}}\left( {{s_k} - {s_{k - 1}}} \right)\) and also involves the determination of whether the approximate solution sk reaches the set iterative accuracy at every iteration; Step 4 repeats this procedure until the termination condition is satisfied or the number of iterations exceeds the set maximum K.

Flow chart of the determination of AEBR
2.3 Determination of AEC-BV
AEC-BV is the extinction coefficient at the reference height rm. If the effective detection range is higher than the tropopause, the determination of the AEC-BV can be treated as an ideal condition, and the ideal condition can be empirically known. However, when the detection range is lower than the tropopause, AEC-BV must be derived by a special algorithm. In this study, we also use the secant method to numerically solve a nonlinear equation for αa−BV based on Fernald method. As we know, the intensity of the echo signal decays in proportion to the square of the distance in the initial stage, and it tends to be stable with the increase of the distance. Therefore, a short distance interval (rb, rm) can be selected, for which the fluctuation of the signal intensity is nearly steady with increasing distance. Thus, the mean value of the extinction coefficient within this interval can be considered to be approximately equal to the value of AEC-BV, and its nonlinear equation is as follows:
where αmean is the average extinction coefficient, which can be expressed as follows:
in which \(n={\text{floor}}\left( {\frac{{{r_{\text{m}}} - {r_{\text{b}}}}}{{\Delta r}}} \right)\) denotes the number of iterations, ∆r is the lidar range resolution and \({r_i}={r_b}+\Delta r \cdot i\). Similar to the AEBR solution process, we can also use the secant method to solve Eq. (5), and then, determine the AEC-BV. First, we select the initial iterative values for \(\alpha _{{{\text{a}} - {\text{BV}}}}^{{ - 1}}\) and \(\alpha _{{{\text{a}} - {\text{BV}}}}^{0}\) according to the convergence principle. Then, we generate the iterative sequence \(\left\{ {\alpha _{{{\text{a}} - {\text{BV}}}}^{k}} \right\}\) based on the recursive formula \(\alpha _{{{\text{a}} - {\text{BV}}}}^{{k+1}}=\alpha _{{{\text{a}} - {\text{BV}}}}^{k} - \frac{{f\left( {\alpha _{{{\text{a}} - {\text{BV}}}}^{k}} \right)}}{{f\left( {\alpha _{{{\text{a}} - {\text{BV}}}}^{k}} \right) - f\left( {\alpha _{{{\text{a}} - {\text{BV}}}}^{{k - 1}}} \right)}}\left( {\alpha _{{{\text{a}} - {\text{BV}}}}^{k} - \alpha _{{{\text{a}} - {\text{BV}}}}^{{k - 1}}} \right)\). Third, we continue this iterative process until the relative error is less than the set error limit (\({{\left| {\alpha _{{{\text{a}} - {\text{BV}}}}^{k} - \alpha _{{{\text{a}} - {\text{BV}}}}^{{k - 1}}} \right|} \mathord{\left/ {\vphantom {{\left| {\alpha _{{{\text{a}} - {\text{BV}}}}^{k} - \alpha _{{{\text{a}} - {\text{BV}}}}^{{k - 1}}} \right|} {\alpha _{{{\text{a}} - {\text{BV}}}}^{k}}}} \right. \kern-0pt} {\alpha _{{{\text{a}} - {\text{BV}}}}^{k}}} \leqslant \varepsilon\)) or the number of iterations reaches the set upper limit. Finally, we set the value of \(\alpha _{{{\text{a}} - {\text{BV}}}}^{k}\) generated by the final iteration as the AEC-BV.
2.4 Retrieval of AEC based on RBF-FB network
As it is well-known, the RBF network is a mathematical model based on the biological nervous system, which is capable of learning complex nonlinear relationships among different variables [34]. RBF networks usually contain an input layer, hidden layer and output layer, with each layer being composed of multiple neurons [35]. The input neurons feed the values to each of the neurons in the hidden layer. Each hidden neuron consists of an RBF function centered on a well-positioned point, which is also referred to as the basis center. Then, the value generated by a neuron in the hidden layer is multiplied by a weight associated with the neuron and is then passed to the summation; this adds the weighted values and presents this sum as the network output. Therefore, if the input vector is \(A\left( {{a_1}, {a_2}, \ldots , {a_n}} \right)\), the output of the RBF network can be expressed as follows:
where n is the size of the input vector, wi defines the weight between the corresponding hidden neuron and the output, Hi represents the RBF function, \(\left\| {a - {c_i}} \right\|\) is the Euclidean distance of the input a from the basis center ci, and ζ denotes the standard deviation of the radial basis function, which can be determined by:
where dmax is the maximum value among Euclidean distances between centers, and M is the number of centers. To simplify the complexity of this network, in this study, we chose the popular Gaussian function as the RBF function:
The established RBF network must be trained using a set of input and output data, and it can then be used to determine the parameters of w and c. Here, for parameter adaption, we adopt the gradient descent method based on the error back propagation. Before network training, we initialize w and c to small values. Then, we iteratively adapt w and c toward the direction in which the back-propagated error decreases rapidly. The update of w and c can be obtained by Eqs. (10) and (11) [36], as follows:
where E represents the back-propagated error, which equals yi−bi. yi is the desired output and bi is the actual output of the RBF network. ηw and ηc are the learning rates of w and c, respectively. We adopt a termination condition in the form of the mean square error (MSE) to end the iterative adaption process. When the MSE between the actual and desired outputs is less than the set error limit, the network training is considered to be accomplished. Thereafter, the trained RBF network can be used to estimate the required result based on the inputs.
Figure 2 shows a flow chart of the proposed RBF-FB network model for retrieving the AEC. First, we mapped a large number of lidar signals and their corresponding AECs, obtained by the Fernald method, into inputs and desired outputs of the network, respectively. This set of input and output data constitute the initial learning samples for network training, after which we can determine w and c. Based on the trained RBF network, we can predict the corresponding AEC according to a given lidar signal. However, in practical applications, the RBF network model is difficult to achieve accurate retrieval for various weather conditions due to the limited training samples. To improve the inversion accuracy, a feedback correction layer is introduced, through which the predicted AEC can be further corrected using the error between the calculated AODlidar and the AODsun measured by the sun photometer. The correction formula is expressed as:

Flow chart of RBF-FB model for retrieving AEC
where ω is the difference between the AODlidar and the AODsun. It is worth noting that any errors in the AODsun will be induced on the retrieved integration extinction coefficient. Therefore, we must ensure that the selected channel wavelength and the measurement time of the sun photometer match with the parameters of lidar when using the AODsun for the correction.
3 Observation area and instruments
Continuous systematic observations of the vertical distribution of the atmospheric extinction coefficients were made at the Nanjing University of Information Science and Technology (32.2°N, 118.7°E). The Mie-scattering lidar used in the experiment was developed by the Anhui Institute of Optics and Fine Mechanics, Chinese Academy of Sciences. This lidar system contains a diode-pumped Nd:YAG laser with a pulse output wavelength of 532 nm. The pulse repetition rate of the transmitter is 20 Hz and the pulse energy is approximately 200 mJ, which corresponds to an average laser power of 4 W. The receiver unit contains a 400-mm diameter Cassegrain telescope with a field of view (FOV) of 2 mrad. The lidar echo signal is received by a photomultiplier tube and sampled at a range resolution of 30 m. The sun photometer used for the AEC correction is an automatic sun-tracking spectrophotometer (CE318, CIMEL Electronique, France), which is the standard instrument applied by most global aerosol observation networks, including the AERONET, PHOTONS, AEROCAN, and CARSNET. This sun photometer performs measurements with an approximate FOV of 21 mrad, and it measures both direct spectral solar irradiance and diffuse sky radiance to study the atmospheric transmittance, optical depth, ozone amount and particle size distribution at nominal wavelengths of 340 nm, 380 nm, 440 nm, 500 nm, 675 nm, 870 nm, 936 nm and 1020 nm.
4 Results and discussion
To retrieve the AEC, the echo signal received by lidar requires a series of preprocessing steps, including range square correction, geometric overlap factor (GOF) correction and noise reduction. Since the signal intensity decays with propagation distance, the range square correction can be accomplished by multiplying the received signal strength with the square of the distance. However, the incomplete overlap of the laser transmitting and receiving fields leads to inconsistent reception efficiency of the echo signals at different distances [30]. Figure 3a shows the calculated GOF at various heights of our lidar system, and Fig. 3b shows the GOF-corrected signal. As we can see in these figures, there is a distinct difference in signal intensities between the GOF-corrected and original signals at heights below 1.8 km. However, the two signals become almost identical when the height exceeds 1.8 km; this indicates that the FOVs of the transmitter and receiver overlap completely. Finally, the GOF-corrected signal is denoised with the correlation-based EMD (empirical mode decomposition) method, which adopts the soft thresholding and the roughness penalty techniques to, respectively, deal with the irrelevant and relevant modes for effective extraction of the useful information [37].

a GOF as a function of detection height. b GOF correction for lidar signal
As we know, AEBR and AEC-BV are essential for high-precision inversion of AEC for the single wavelength Mie-scattering lidar. An assumed or inaccurate AEC-BV and AEBR will cause large errors in the inversion results. To acquire an exact AEBR with the secant method, we selected two sets of initial iterative values (s−1, s0) of (80, 70) and (s−1, s0) of (80, 75) according to the convergence principle. The TODsun measured by the sun photometer was 0.46, which was synchronized with the lidar observations. The nominal wavelength of the measurement was 500 nm, which was the closest to the channel wavelength, 532 nm. Based on the US standard atmospheric molecule model, the calculated MOD value is 0.008, so we can deduce the AODsun value to be 0.452. Then, we used the iterative formula in “Determination of AEBR” to generate the iterative sequence. Figure 4a shows the iterative AEBR results using different initial iterative values. As shown, the iterative values of the two groups converge and stabilize at 66.33 after the fifth iteration. Similarly, while determining the AEC-BV, we chose the initial iterative values to be (0.09, 0.08) and (0.09, 0.06). With regards to the observed lidar signal, we selected the mean values of the extinction coefficient between 6.4 and 6.9 km for it to be considered as the AEC-BV value to construct the nonlinear equation. Using the secant method, we generated the iterative sequence, as shown in Fig. 4b, in which we can see that both the iterative results converge to 0.031 and the numbers of iterations are 3 and 2, respectively. The above results indicate that although different iterative initial values affect the convergence speed, they eventually converge to nearly the same value.

a Determination of AEBR. b Determination of AEC-BV
Next, we retrieved the AEC profiles for different AEBR and AEC-BV values based on Fernald method. We set the AEBR to 50 (empirical value) [14] and 66.33 Sr and chose AEC-BV values of 0.025 (empirical value) [17] and 0.031. As shown in Fig. 5, the four retrieved AEC profiles have approximately the same variation trend, but there are evident differences in the extinction coefficient values, especially in the range below 1.5 km. To verify the accuracy of the inversion results, we used the AODsun as a reference for comparison with the calculated AODlidar by integrating the AECs. Using Eq. (3), the calculated results for the AODlidar are found to be 0.275, 0.412, 0.364 and 0.467; these results correspond to the AEBR and AEC-BV values of 50 and 0.025, 50 and 0.031, 66.33 and 0.025, and 66.33 and 0.031, respectively. It is obvious that the value 0.467 is closest to that of the AODsun, and the corresponding profile is considered to be the closest to the actual distribution of the AEC. These results indicate that the AEBR and AEC-BV values are not only the precondition for AEC inversion but also have a significant influence on the precision of the inversion results.

AEC profiles retrieved with different AEC-BVs and AEBRs
To apply the RBF network model to the inversion of the AEC, we conducted a month long experimental observation in March 2017. The measurement data were divided into the learning dataset (obtained from 1 to 20 March) and the test dataset (obtained from 21 to 28 March). During the period of March 1st–20th, there were 10 sunny days, 6 cloudy days and 4 rainy days. According to the intensity distribution characteristics of the observed echo signals, we selected the data between 0.03 and 7 km for analysis and processing. Then, we used the learning dataset to train the RBF network model and the test dataset to evaluate the network output performance. As described in “Retrieval of AEC based on RBF-FB network”, the learning samples consist of the received lidar echo signals (input vector) and their corresponding AEC profiles (desired output) obtained by Fernald method. To train the RBF network properly, we carefully selected the parameters in this study based on our experience, the terminating condition for parameter adaption EMS < 0.001 and the learning rates ηw = 0.01 and ηc = 0.01. The standard deviation of the radial basis function (ζ) is calculated to be 0.05 according to Eq. (8). When the RBF training process converges to the terminating condition, the trained weights w and centers c are available to commission the RBF network to retrieve the AEC.
To investigate the output characteristics of the established RBF model, we selected a set of lidar data from the test subset for analysis. Figure 6a shows the outputs of the RBF network model trained by different numbers of learning samples and the desired result obtained using the Fernald method. As shown in the figure, there are big differences between the network outputs and the output obtained by Fernald method at heights below 1.5 km. The root mean square errors (RMSEs) are 2.413E−2, 2.165E−2, 1.382E−2 and 9.671E−3, which correspond to the numbers of learning samples of 850, 1700, 2550 and 3400, respectively. With increase in the learning sample size, the network output gradually approaches the outputs obtained by Fernald method. To further improve the accuracy, we introduced a feedback correction layer into the RBF model to correct the network output. The error ω between the AODlidar and the AODsun was calculated to be 0.085 and then the network output was corrected according to Eq. (12). Figure 6b shows the AEC profiles of the output obtained by Fernald method, the network output (N = 3400) and the corrected result. The inset plot shows a local enlarged diagram for the range 0.3–1.5 km. As seen in the figure, the corrected AEC profile is almost consistent with the output obtained by Fernald method, and the RMSE has decreased to 3.683E−3. Thus, using the proposed RBF-FB model, the output precision has been greatly improved. In addition, comparing with Fernald method, a well-trained RBF network model does not need to solve AEC-BV and AEBR and the inversion efficiency can be significantly enhanced using the nonlinear mapping relations to retrieve AEC.

a Network outputs with different numbers of learning samples. b AEC profile retrieved by the RBF-FB method
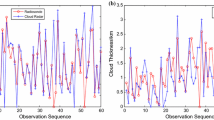
The prediction accuracy of the RBF-FB model for different weather conditions was also investigated. We selected the echo signals observed under a cloudy (March 24th) and a sunny (March 26th) weather to retrieve the AEC profiles respectively. The outputs obtained by Fernald method and the predicted results of the RBF-FB model are displayed in Fig. 7. As shown, the outputs of the RBF-FB model under the two weather conditions are in good agreement with the outputs obtained by Fernald method. The RMSE are 7.629E−3 and 4.336E−3, respectively, corresponding to the inversion results for the cloudy (Fig. 7 a) and the sunny (Fig. 7 b) conditions. However, it should be noted that the current RBF-FB can not predict accurate outputs for all weather conditions owing to the limited learning samples. It is believed that, with the accumulation of the number and variety of the learning samples, the application scope and output accuracy of the RBF-FB model will be continuously improved.

Comparisons of the output obtained by Fernald method and the AEC profile predicted by the RBF-FB model using a set of data measured in the different weather conditions. a the cloudy day (on March 24, 2017). b the sunny day (on March 26, 2017)
5 Conclusion
In this study, we proposed an RBF-FB neural network approach for the efficient retrieval of AEC profiles based on lidar measurements. We employed the secant method to determine the AEC-BV and AEBR values, which greatly improves the inversion accuracy of the Fernald method. By choosing a large number of measured lidar signals and their corresponding AEC profiles as learning samples, we established an RBF neural network model for AEC retrieval. To improve the precision of the network output, we added a feedback layer to the established RBF model, which uses the AOD measured by a sun photometer as the error criterion. Our simulation results show that the predicted output of the RBF-FB model has good consistency with the outputs obtained by Fernald method. In comparison with the previous AEC inversion methods, our proposed RBF-FB model can significantly reduce the inversion time simply using nonlinear mapping between the backscattering signal and the AEC profiles.
References
E. Chemyakin, S. Burton, A. Kolgotin, D. Müller, C. Hostetler, R. Ferrare, Appl. Opt. 55, 2188 (2016)
S. Ghosh, M.H. Smith, A. Rap, Phil. Trans. R. Soc. 365, 2659 (2007)
Z.M. Tao, D. Liu, X.M. Ma, B. Shi, H.H. Shan, M. Zhao, C.B. Xie, Y.J. Wang, Appl. Phys. B. 120, 631 (2015)
W.D. Yan, L.X. Yang, J.M. Chen, X.F. Wang, L. Wen, T. Zhao, W.X. Wang, Atmos. Res. 188, 39 (2017)
M. Li, L.H. Jiang, X.L. Xiong, Y.Z. Ma, J.S. Liu, Opt. Rev. 23, 646 (2016)
Q.S. He, C.C. Li, J.T. Mao, A.K.H. Lau, P.R. Li, Atmos. Chem. Phys. 6, 3243 (2006)
Z.R. Zhou, D.X. Hua, Y.F. Wang, Q. Yang, S.C. Li, Y. Li, H.W. Wang, Opt. Lasers Eng. 51, 961 (2013)
R.T.H. Collis, F.G. Fernald, M.G.H. Ligda, Nature. 203, 1274 (1964)
R. Francesc, C. Adolfo, P. Daniel, Appl. Opt. 37, 2199 (1998)
J.M.B. Dias, J.M.N. Leitao, E.S.R. Fonseca, IEEE Trans. Geosci. Remote Sens. 42, 443 (2004)
J.D. Klett, Appl. Opt. 20, 211 (1981)
F.G. Fernald, Appl. Opt. 23, 652 (1984)
F.Y. Mao, W. Gong, T. Logan, Opt. Express 21, 26876 (2013)
F.Y. Mao, W. Gong, C. Li, Opt. Express 21, 8286 (2013)
F.Y. Mao, W. Gong, Y.Y. Ma, Opt. Lett. 37, 617 (2012)
A. Albert, R. Maren, W. Claus, Opt. Lett. 15, 746 (1990)
N.W. Cao, F.K. Yang, C.X. Zhu, Opt. Spectrosc. 116, 649 (2014)
J. Su, Y.H. Wu, M.P. McCormick, L.Q. Lei, R.B. Lee, III: Appl. Phys. B. 116, 61 (2014)
J.K. Gerard, D.L. Gerrit, Appl. Opt. 32, 3249 (1993)
J.H. Qiu, Adv. Atmos. Sci. 5, 229 (1988)
V.A. Kovalev, Appl. Opt. 32, 6053 (1993)
T. Takamura, Y. Sasano, T. Hayasaka, Appl. Opt. 33, 7132 (1994)
A. Albert, W. Ulla, R. Maren, W. Claus, M. Walfried, Appl. Opt. 31, 7113 (1992)
J.W. Hair, C.A. Hostetler, A.L. Cook, D.B. Harper, R.A. Ferrare, T.L. Mack, W. Welch, L.R. Lzquierdo, F.E. Hovis, Appl. Opt. 47, 6734 (2008)
X.M. Lu, Y.S. Jiang, X.G. Zhang, X.X. Lu, Y.T. He, Opt. Express 17, 8719 (2009)
X.M. Lu, Y.S. Jiang, X.G. Zhang, X. Wang, N. Spinelli, J. Quant. Spectrosc. Radiat. Transf. 112, 320 (2011)
S. Garbarino, A. Sorrentino, A.M. Massone, A. Sannino, A. Boselli, X. Wang, N. Spinelli, M. Piana, Opt. Express 24, 21497 (2016)
X. Cao, Z. Wang, P. Tian, J. Wang, L. Zhang, X. Quan, J. Quant. Spectrosc. Radiat. Transf. 122, 150 (2013)
W. Gong, W. Wang, F.Y. Mao, J.Y. Zhang, Opt. Commun. 349, 145 (2015)
C.W. Chiang, S.K. Das, J.B. Nee, J. Quant. Spectrosc. Radiat. Transf. 109, 1187 (2008)
Y. Sasano, H. Nakane, Appl. Opt. 23, 11_1–11_3 (1984)
W. Wang, W. Gong, F.Y. Mao, Z.X. Pan, B.M. Liu, Int. J. Environ. Res. Public Health 13, 508 (2016)
P.W. Chan, Remote Sens. 2, 2127 (2010)
M.J. Er, S.Q. Wu, J.W. Lu, H.L. Toh, IEEE Trans. Neural Netw. 13, 697 (2002)
R. Yang, P.V. Er, Z.D. Wang, K.K. Tan, Neurocomputing. 199, 31 (2016)
R. Yang, K.K. Tan, A. Tay, S.N. Huang, J. Sun, J. Fuh, Y.S. Wong, C.S. Teo, Z.D. Wang, Neural Comput. Appl. 28, 1235 (2017)
J.H. Chang, L.Y. Zhu, H.X. Li, F. Xu, B.G. Liu, Z.B. Yang, Opt. Commun. 407, 290 (2018)
Acknowledgements
This study was supported by the National Natural Science Foundation of China (61875089,11374161); the Primary Research & Development Plan of Jiangsu Province, China (BE2016756); the Project Funded by the Priority Academic Program Development of Jiangsu Higher Education Institutions, China (1081080015001), the Top-notch Academic Programs Project of Jiangsu Higher Education Institutions, China (1181081501003).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Li, H., Chang, J., Xu, F. et al. An RBF neural network approach for retrieving atmospheric extinction coefficients based on lidar measurements. Appl. Phys. B 124, 184 (2018). https://doi.org/10.1007/s00340-018-7055-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00340-018-7055-1