
Abstract
Absolute distance measurements can be achieved by frequency scanning interferometry which uses a tunable laser. The main drawback of this method is that it is extremely sensitive to the movement of targets. In addition, since this method is limited to the linearity of frequency scanning, it is commonly used for close measurements within tens of meters. In order to solve these problems, a double-sideband frequency scanning interferometry system is presented in the paper. It generates two opposite frequency scanning signals through a fixed frequency laser and a Mach–Zehnder modulator. And the system distinguishes the two interference fringe patterns corresponding to the two signals by IQ demodulation (i.e., quadrature detection) of the echo. According to the principle of double-sideband modulation, the two signals have the same characteristics. Therefore, the error caused by the target movement can be effectively eliminated, which is similar to dual-laser frequency scanned interferometry. In addition, this method avoids the contradiction between laser frequency stability and swept performance. The system can be applied to measure the distance of the order of kilometers, which profits from the good linearity of frequency scanning. In the experiment, a precision about 3 μm was achieved for a kilometer-level distance.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Frequency scanning interferometry (FSI) is a promising technology and widely used for absolute distance measurements [1,2,3]. In most FSI systems, laser frequency scanning is obtained through a tunable laser for high-precision absolute distance measurements of a stationary target at a distance of several meters. However, it is difficult to reach high optical chirp linearization by using tunable laser, which limits the application of FSI at long distance [4,5,6,7,8, 16]. One of the solutions to the problem is to use frequency combs [9,10,11], but this will increase the complexity of the system. In addition, FSI system usually needs another tunable laser which produces the frequency scanning in opposite direction to solve the problem that a slight movement of the target leads to large errors [3, 12, 13]. A deviation as the synthetic wavelength is generated, when the target moves the same distance as the laser wavelength [14, 15]. And the characteristics of two tunable lasers are not exactly the same. Therefore, another laser not only means that the system is more complex, but also means residual deviation which is much greater than accuracy of FSI system.
In this paper, we propose double-sideband frequency scanning interferometry (DSB-FSI) for absolute distance measurements of long-range non-stationary targets. In DSB-FSI system, a fixed frequency laser is used. Consequently, the contradiction between stability and tunability of laser is avoided [6]. The DSB-FSI system uses the Mach–Zehnder modulator to achieve the double-sideband linear frequency modulation on the laser. The essence of the modulation is the movement of the spectrum. Because the positive and negative frequency scanning sidebands are derived from the positive and negative frequencies of the baseband signal, respectively, the characteristics of two frequency scanning are the same at all times. Compared to tunable lasers, this modulation method has a higher sweep rate and shorter measurement time, which reduces the deviation from target movement [2, 16]. In addition, the modulation method is of good linearity to meet the requirements of long-distance measurement.
2 Experimental system and measurement principle
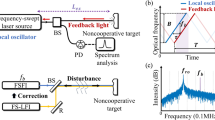
We have designed and implemented the DSB-FSI system, and the schematic diagram is shown in Fig. 1. The narrowband laser is fixed at 1550 nm with a linewidth of less than 1 kHz. The two frequency scanning sidebands whose scanning bandwidths are both 6 GHz and sweep time are 50 μs obtained by a Mach–Zehnder modulator. When the RF chirp signal sweeps in the positive direction, the upper and lower sidebands of the modulated laser correspond to the positive and negative frequency scanning, respectively. Then, an erbium-doped optical fiber amplifier (EDFA) is used to amplify the laser signal. The output from the EDFA is split into two portions; one of them is used as the local oscillator for an optical hybrid (Kylia, COH24-X) and another is the transmitted signal. As transmitting and receiving used the same telescope, a circulator is used to isolate receiving signals from transmitting signals. In some experiments, in order to simulate the long distance, the laser echo passes through a delay fiber before it enters the hybrid for IQ demodulation [17]. In the IQ demodulation, two copies of the local oscillator are generated, one 90 degrees delayed with respect to the other, which are “I” (in-phase) and “Q” (quadrature-phase), respectively. The laser echo mix with I and Q, and two output signals are obtained. Then, output signals of the hybrid are detected by two balanced photodetectors. After digital sampling, signal processing and the calculation of measurement are all done in the digital domain.

Schematic diagram of DSB-FSI system
The principle of traditional FSI is that the “optical path difference” (OPD) is obtained by calculating the total phase change of the interference light intensity signal, that is, the number of fringes. The OPD is proportional to the number of fringes, which can be written as [13, 16]
where \(L\) is the OPD, \(\Delta N\) is the number of fringes, \(c\) is the speed of light, and \(B\) is the bandwidth of frequency scanning.
Since the target movement has a significant effect on the result of measurement, two tunable lasers are usually used to scan in opposite directions to eliminate the error. The frequencies of two tunable lasers vary greatly at the same time, which usually can reach the order of 0.1–1 THz. And in the dual tunable lasers FSI system, there are two local oscillator laser beams of which both contains only one sweep direction. Therefore, even if the laser echo beam contains two frequency scanning signals in opposite directions, respectively, interfering with the two local oscillators, only the corresponding interference fringe patterns can be converted into electrical signals by the photodetector. That is, the aliasing of the interference fringe patterns can be avoided. And the \(\Delta N\) in Eq. (1) can be easily obtained by fitting. However, in DSB-FSI system, there is only one local oscillator beam. And both of the echo beam and the local oscillator beam contain two frequency scanning signals. At the same time, the frequency difference between the 2 signals is less than 12 GHz. In the circumstances, the two interference fringe patterns are aliasing. As the target is usually not stationary, the numbers of interference fringes in both patterns are needed to offset the errors. Therefore, IQ demodulation is required to distinguish between two patterns. It is more convenient to use the complex signals to analyze; then, the transmitted signal of DSB-FSI can be expressed as
where \(s_{{t,{\text{upper}},n}} (t)\) represents the upper sideband of the nth transmitted signal, and \(s_{{t,{\text{lower}},n}} (t)\) represents the lower sideband of the nth transmitted signal. \(f_{\text{L}}\) is the frequency of laser. And \(K\) is the rate of frequency scanning. Assume that OPD is \(L_{n}\) at the beginning of the nth measurement. Since the single measurement time is only 50 μs, the velocity of the target can be approximated to a fixed value, \(v_{n}\), in this time. Then, the echo signal can be expressed as
where \(s_{{r,{\text{upper}},n}} (t)\) represents the upper sideband of the nth echo signal, and \(s_{{r,{\text{lower}},n}} (t)\) represents the lower sideband of the nth echo signal. Since the target of the FSI system is usually a corner cube, the signal-to-noise ratio of echo is high, which can reach 70 dB in our experiments. Thus, the effect of noise in Eq. (3) is ignored. The electrical signal obtained by IQ demodulation and photoelectric conversion can be described as
where the symbol “\(*\)” indicates conjugation. It should be noted that the above analysis ignores meaningless DC signal and the change in signal amplitude. It can be seen that in the electrical signal, two approximate single frequency signals of positive and negative frequencies are obtained through the upper and lower sidebands. In addition to the linear phase, the two signals also contain smaller quadratic phase residues due to the target motion. The absolute value \(\Delta \varPhi_{\text{upper}}\) and \(\Delta \varPhi_{\text{lower}}\) of the phase change amount of the two signals in a measurement time \(T\) can be obtained by the signal processing algorithm. Then, the mean of them is
Reversing Eq. (5), the estimated value of OPD \(\hat{L}_{n}\) should be calculated as
According to Eq. (6), the OPD \(\hat{L}_{n}\) is obtained directly by calculating the amount of phase change \(\Delta \varPhi\) within one pulse. Therefore, as with traditional FSI, DSB-FSI can also achieve absolute measurement of OPD. Since the time \(T\) is very short, the effect of the approximation on the final result in the above equation is picometer order of magnitude. Taking into account the measurement accuracy, the effect is negligible. After the approximation, \(L_{n} + v_{n} T\) represents the statistical mean of the OPD in the nth measurement, and \(- {{2L_{n} v_{n} } \mathord{\left/ {\vphantom {{2L_{n} v_{n} } c}} \right. \kern-0pt} c}\) is the residual error after the cancelation. If the distance becomes large, the residual error will have some effect on the measurement result. Therefore, it is necessary to accurately estimate the velocity of target to compensate for this error. Since the IQ demodulation is used in DSB-FSI system, it is possible to obtain the optical phase of the echo signal, that is, the initial phase of the two signals in Eq. (4), which corresponds to the laser wavelength. Although the absolute value of OPD cannot be obtained due to the short laser wavelength, the relative change in OPD can be obtained by the initial phase, which is similar to laser vibration measuring. The accuracy of this relative measurement can be up to nanometer level. Therefore, it can be used to accurately estimate the velocity of the target to compensate for the residual error described above. In addition, this change can also contribute to obtaining the optimal unbiased estimation of OPD by Kalman filtering, which improves the measurement accuracy [18, 19].
According to Eq. (6), the factors that affect the standard deviation \(\sigma_{{\hat{L}_{n} }}\) of the estimated values of OPD are shown in Table 1.
After eliminating the error caused by the target displacement, the DSB-FSI is equivalent to the conventional FSI system which is under ideal conditions (i.e., the target is absolutely stationary). And Eq. (6) conforms to the ideal FSI model. Therefore, according to the analysis of the conventional FSI system in [12, 16], the relationship between \(\sigma_{{\hat{L}_{n} }}\) and all factors can be expressed as:
Since the estimation of the target velocity is obtained by the laser phase, the value of \(\sigma_{{v_{n} }}\) is small. So, the effect of it on \(\sigma_{{\hat{L}_{n} }}\) is neglected. In our experiments, the rate of frequency scanning \(K = 120\;{\text{THz/s}}\), the pulse width \(T = 50\) µs. This frequency scanning signal is generated by the arbitrary waveform generator (Tektronix, AWG70001A). After nonlinear correction, \(\sigma_{K} < 100\;{\text{kHz/s}}\) and \(\sigma_{T} < 0.25\;{\text{ps}}\). Through the signal processing algorithm, the standard deviation of the phase estimation \(\sigma_{\Delta \varPhi }\) can be on the order of 10−4 rad under the condition of high signal-to-noise ratio. Therefore, the standard deviation \(\sigma_{{\hat{L}_{n} }}\) is on the order of microns after removing the error caused by the small displacement of the target.
3 Results and discussion
In order to evaluate the performance of DSB-FSI system and the effect of the target vibration and movement on the accuracy of absolute distance measurements, three types of experiments were conducted: (1) stability test, (2) vibration test and (3) movement test. In all experiments, both the system and the target were not placed on the optical platform.
3.1 Stability test
The main purpose is to evaluate the accuracy of absolute distance measurements. In this test, a corner cube was displaced two times in stages of about 0.1 mm and displaced once over a distance of about 0.3 mm. In other words, the corner cube was located in four positions: the initial position L/2, L/2 + 0.1 mm, L/2 + 0.2 mm, L/2 + 0.5 mm. The measurements of the target at different positions were independent. There is no need to observe the continuous movement of the target from one point to another. In other words, it is no need to track the target continuously for DSB-FSI system. This also proves that DSB-FSI system has the capability of absolute distance measurements. It is similar to the dual-laser scanning system that errors can be eliminated through positive and negative scanning in DSB-FSI system, as shown in Fig. 2.

Measured displacements at a distance of 1 km. a Test results at four positions. b The detail of optimal estimation in the 901th to 1200th measurements
In Fig. 2a, the blue curve represents the absolute distance measurement result obtained from the upper sideband, and the red curve represents the result obtained from the lower sideband. The black curve represents the final result of the system. Although the corner cube is fixed in a measurement, small movements of the corner cube have significant effects on the distance measurements obtained by using only one sideband due to the small frequency scanning bandwidth of only 6 GHz. According to the principle of FSI, the ratio of the target displacement to the laser wavelength is equal to the ratio of the measurement error to the synthetic wavelength [3, 12, 13, 15]. For a single sideband system with a bandwidth \(B = 6\;{\text{GHz}}\) and the laser wavelength \(\lambda = 1550\;{\text{nm}}\), the error magnification factor \({{\varOmega = \lambda_{\text{s}} } \mathord{\left/ {\vphantom {{\varOmega = \lambda_{\text{s}} } {\lambda \approx 3.2 \times 10^{4} }}} \right. \kern-0pt} {\lambda \approx 3.2 \times 10^{4} }}\), where \(\lambda_{\text{s}}\) is the synthetic wavelength, and \(\lambda_{\text{s}} = {c \mathord{\left/ {\vphantom {c {B = 5\;{\text{cm}}}}} \right. \kern-0pt} {B = 5\;{\text{cm}}}}\). Under these circumstances, the movement of 10 nm produces a deviation of about 387 μm. The standard deviation obtained by one sideband alone is approximately 0.4 mm. The accuracy is improved by the cancelation of upper and lower sidebands and Kalman filtering. As shown in Fig. 2b, the standard deviation of the optimal estimation was 2.04 μm in the 901th to 1200th measurements. Ultimately, the standard deviation of the estimated distance is 3.18 μm for all measurements. The experimental result is consistent with the estimates of the standard deviation \(\sigma_{{\hat{L}_{n} }}\) in Sect. 2, which proves the effectiveness of the DSB-FSI system in removing the error caused by the small displacement of the target. The above test was repeated at different distances and conditions, and results are shown in Table 2. It can be seen that the accuracy of absolute distance measurement is independent of the distance under test conditions. However, as the distance increases, the optical paths of both the optical fiber and the free space are more susceptible to the environment, which leads to a certain degree of randomness.
3.2 Vibration test
Since the actual movement of the target is usually accompanied by vibration, the effect of vibration on the accuracy should be evaluated before the movement test. It should be noted that the magnitude of the target vibration in this test should be less than the absolute range accuracy that the system can achieve. Large vibration should be regarded as the movement of the target, which belongs to the category of movement test.
In the experiment, a corner cube was placed in a fixed position, and it was vibrated by applying an external source. The actual situation of the vibration is obtained by the change of the laser phase. As shown in Fig. 3b, the black curve represents the displacement of the corner cube during a measurement time. As described in the curve, the corner cube was in the vibrating state at the middle of the test time and static at the beginning and end of the test. The relative displacement of the vibration was less than 0.2 μm, which was far less than the absolute measurement accuracy (about 3 μm). Therefore, the system should not be affected under this vibration condition, which is corroborated in Fig. 3a. The blue and red curves in Fig. 3a represent the measurements obtained by the upper and lower sidebands. The small vibrations had a large effect on them (error of about 5 mm). The black curve represents the final distance estimate of the system. According to it, the standard deviation of the distance measurement can be evaluated to 3.11 μm. Specifically, the standard deviation of the final distance measurement was 2.02 μm in the area where the corner cube was static, and the standard deviation of the final distance measurement was 1.55 μm in the area where the corner cube was vibrating. Therefore, the vibration has little effect on the accuracy of absolute distance measurement in DSB-FSI system.

Performance of the system in vibration test. a Test results in the case of vibration. b The vibration displacement of the corner cube in measurements
3.3 Movement test
A corner cube was placed on a translating rail and driven by a stepper motor. During the experiment, the corner cube always moved in the same direction at a fixed speed. As described by the blue and red curves in Fig. 4, the Doppler frequency due to the motion resulted in deviations of more than 2 cm in the distance measurements obtained by a single sideband. As the stepper motor was driven by the current in the form of pulses, the speed of corner cube shook with the pulse, which resulted in jitter on the blue and red curves. However, after the cancelation and optimal estimation, the final measurements avoided the deviation from the Doppler frequency, as shown by the black curve in Fig. 4. The black curve is linearly fitted according to parameters of the stepper motor, as shown by the red curve in Fig. 5a. And the residual is represented by the blue curve, as shown in Fig. 5b. According to the residuals, the standard deviation of the absolute distance measurement can be evaluated to 2.24 μm.

Performance of the system in movement test

Linear fit and residuals for movement. a Test linear fit of optimal estimation. b The residuals
4 Conclusion and future work
In summary, DSB-FSI system can achieve high-precision absolute distance measurement for long-range non-stationary target. The system uses a fixed frequency laser and a Mach–Zehnder modulator to generate positive and negative frequency scanning signals, which avoids the contradiction between laser frequency stability and the performance of frequency scanning. In addition, characteristics of two frequency scanning signals produced by this method are the same, and the sweep time is short (only 50 μs). Therefore, the error produced by the target vibration and movement can be effectively eliminated in the case where the frequency scanning bandwidth is small (only 6 GHz). The IQ demodulation of the laser echo can not only distinguish the two interference fringe patterns effectively, but also detect the laser phase more conveniently. Through this phase, the relative displacement of the nanometer level can be obtained. The accuracy of absolute distance measurements is larger than the half-wavelength of laser, in other words, the relative displacement cannot be directly used for absolute measurements, but it can be used to obtain the optimal estimate of the absolute distance by Kalman filtering, which improves the accuracy of DSB-FSI system. Ultimately, the standard deviation of the absolute measurement of the kilometer-level distance can reach 3 μm with the acquisition speed of 20 kHz, which has great practical value.
As the distance increases, the signal-to-noise ratio of the echo decreases. For more remote applications, signal-to-noise ratio is one of the factors that affect system performance. Analysis of the impact of noise on the system will be carried out in future work. At this stage of the experiment, the frequency scanning signal is generated by the arbitrary waveform generator which can be considered an ideal signal sources. In further research, it is necessary to experiment and analyze the influence of non-ideal signal sources on the system, which is conducive to optimizing the system design.
References
J.A. Stone, A. Stejskal, L. Howard, Appl. Opt. 38, 5981 (1999)
P.A. Coe, D.F. Howell, R.B. Nickerson, Meas. Sci. Technol. 15, 2175 (2004)
S. Kakuma, Y. Katase, Opt. Rev. 19, 376 (2012)
P.A. Roos, R.R. Reibel, T. Berg, B. Kaylor, Z.W. Barber, W.R. Babbitt, Opt. Lett. 34, 3692 (2009)
Y.C. Li, Y.Q. Wang, C.Y. Liu, J.R. Yang, Q. Ding, Appl. Phys. B 122, 1 (2016)
S.M. Beck, J.R. Buck, W.F. Buell, R.P. Dickinson, D.A. Kozlowski, N.J. Marechal, T.J. Wright, Appl. Opt. 44, 7621 (2005)
R. Ulrich, R. Torge, Appl. Opt. 12, 2091 (1973)
S. Nemoto, Appl. Opt. 31, 6690 (1992)
S. N. Lea, H. S. Margolis, G. Huang, G. P. Barwood, H. A. Klein, P. J. Blythe et al., in The 15th Annual Meeting of the IEEE Lasers and Electro-Optics Society (LEOS), Glasgow, UK, 10–14 November (2002), Vol 1 (IEEE, 2003)
H.S. Margolis, G. Huang, S.N. Lea, G.P. Barwood, H.A. Klein, P. Gill et al., in 2004 Conference on Precision Electromagnetic Measurements, London, UK, 27 June–2 July (2004), 18 (IEEE, 2004)
F.R. Giorgetta, I. Coddington, J.R. Dahl, N. Greenfield, N.R. Newbury, P.A. Roos et al., Opt. Lett. 36, 1152 (2011)
H.J. Yang, S. Nyberg, K. Riles, Appl. Opt. 44, 3937 (2004)
H.J. Yang, S. Nyberg, K. Riles, Nucl. Instrum. Methods Phys. Res. Sect. A 575, 395 (2007)
B.L. Swinkels, N. Bhattacharya, J.J.M. Braat, Opt. Lett. 30, 2242 (2005)
J. Thiel, T. Pfeifer, M. Hartmann, Measurement 16, 1 (1995)
A.F. Fox-Murphy, D.F. Howell, R.B. Nickerson, A.R. Weidberg, Nucl. Instrum. Methods Phys. Res. Sect. A 383, 229 (1996)
J. Wang, J. Yu, W. Miao, B. Sun, S. Jia, W. Wang, Opt. Lett. 39, 4412 (2014)
L. Tao, Z. Liu, W. Zhang, Y. Zhou, Opt. Lett. 39, 6997 (2014)
Z. Liu, Z. Liu, Z. Deng, L. Tao, Appl. Opt. 55, 2985 (2016)
Acknowledgements
We acknowledge the financial support from Institute of Electronics Chinese Academy of Sciences (IECAS). And this work is partly supported by the National Natural Science Foundation of China (NSFC) (61575198).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Mo, D., Wang, R., Li, Gz. et al. Double-sideband frequency scanning interferometry for long-distance dynamic absolute measurement. Appl. Phys. B 123, 272 (2017). https://doi.org/10.1007/s00340-017-6849-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00340-017-6849-x