
Abstract
Most photoacoustic (PA) work assumes a point-like detection of generated pressure waves; this assumption results in important differences between predicted and experimental signals, as shown in this paper. We used the geometry of a real sensor in the theoretical signal generation through the discretization of the sensing surface, considering each element as a point-like sensor. We modeled the interaction between the wavefront and the real sensor, starting from a well-known PA pressure relation for a point-like source and punctual detection. We obtained the electrical response of the real sensor experimentally and modeled it as a summation of Gaussian functions. The impulse response was convolved with the total PA pressure to obtain the theoretical PA signal. We analyzed the dependence of the source-sensor distance on the discretization size. Then the predicted signal and experimental data were compared for two different frequency response transducers. We found differences in shape and temporal width of simulated PA signals for point-like-source/punctual-detection model and for point-like-source/finite-sensor model.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Pulsed irradiation of an absorbing material with a short laser pulse generates a thermoelastic stress wave, from which the distribution of absorbed energy can be derived. This method, called the pulsed photoacoustic (PA) or optoacoustic method, is ideal for measuring the light penetration in biological tissue, especially for in vivo applications such as imaging (PA tomography) [1] and cancer cell detection [2–4]. In the last decade, PA applications have become very successful because they combine the spatial resolution of ultrasound with the contrast of optical absorption for deep imaging of biological tissues in the diffusion regime [5].
In all applications of PA, a description of the system as complete as possible is needed to get the most useful information; an appropriate model is required for such purposes. This becomes relevant when the PA is implemented in either direct or reconstruction form. In the last 15 years the interest of the PA community has been focused on the reconstruction problem of PA imaging, regardless of whether the thermoelastic model predicts the photoacoustic signal shape. It is noteworthy that, in order to solve an inverse problem, it is necessary to have a correct model that adequately predicts the measured signals.
Recent studies have reported that the PA signal is strongly influenced by the detection method [6, 7]. Polyvinylidene fluoride (PVDF) and lithium niobate crystals have yielded good results to detect PA waves [8, 9]. The PA wave compresses the piezoelectric film at a particular point and time \((\vec{r} ,t),\) resulting in a change in its net dipole moment. These films have a rise time, which is limited to the transit time of the acoustic wave through the film and the electrical signal involved in the sensing process [10]. Optical methods for detection of stress waves improve the rise time [11, 12]; however, the PVDF films are broadly used because they can be implemented in parallel and can be used in aqueous-like media, due to their better impedance match to water than other piezoelectric materials (PVDF is only partially crystalline). These properties are very useful in PA imaging.
Few models for the generation of electrical signals on a piezoelectric transducer take into account the shape of the PA wave [6, 10, 13, 14]. The linear relationship between stresses χ j (N/m2) applied to a piezoelectric material and the resulting charge density D j (C/m2) may be expressed as [15]
where d ij (C/N) are the second range tensor piezoelectric coefficients. The first subscript refers to the electrical axis, while the second one refers to the mechanical axis, i = 1, 2, 3, and j = 1, 2…, 6. The subscripts j = 1, 2 and 3 correspond to axial stress, while j = 4, 5, and 6 represent shear stress. In the case of thin films, the axes of the coordinate system are oriented with the z-axis perpendicular to the plane of the film (i.e. z-axis is parallel to the direction of poling). The electrodes are located at the top and bottom of the film surfaces (Fig. 1). Accordingly, the electrical axis is always i = 3, as the charge or voltage is always transferred through the thickness of the film. Because the thickness of piezoelectric film is small compared to its area, the contribution of mechanical stresses can be reduced to those related to axis 3.

Axes in piezoelectric films. Electrodes are parallel to axis 3
Given the previous approximations, the PA wave compresses the piezoelectric film and the mean displaced charges appear on the transducer electrodes, which are proportional to the instantaneous mean stress inside the film, as follow [10]:
where q(t) is the quantity of displacement charge, A is the active area of the transducer, d 33 is the piezoelectric stress constant, and \(\;\bar{p}(t)\) is the average stress inside the film. The displaced charges recombine as an electrical current flow, i(t) through the input impedance of the oscilloscope. This current produces a time depending voltage u(t). For high input impedance is given by
The total capacitance C is the sum of the capacitances of the transducer, the cable, and the oscilloscope.
Equations (2) and (3) assume that the piezoelectric film is homogeneously poled; it is valid only for a stress uniformly applied on the film surface whose normal is parallel to the z-axis, implying that the incident pressure corresponds to a plane wave. This is not necessarily the case when we refer to PA wave generation and detection, since sources are not always flat.
Until now, most PA models have not taken into account the size and geometry of the piezoelectric detectors, assuming that the generated pressure waves are recorded by point-like sensors. A point-like sensor is one in which the sensing area is small enough that the displaced charges appearing in the transducer electrodes are assumed to be proportional to the instantaneous stress applied on the surface. Experimentally, this approach is rarely the case, as real detectors have a finite size, making them less sensitive to variations in the PA wavefront.
In our study, the size, geometry, and temporal response of a finite piezoelectric detector were taken into account when considering a model of interaction between the sensor and the wavefront. The detector was conformed as a grid of point-like sensors operating in parallel. In order to test this approach, we studied the PA signal produced by a point-like source. The behavior of the PA pressure detected by each point-like sensor was numerically obtained and each individual contribution was summed to obtain a resulting PA pressure. The resulting pressure was convolved with the temporal response of a commercial sensor to obtain the final PA signal, which was compared with experimental data. We found that the shape of the simulated PA signal clearly differs from that predicted by a point-like detection model; our approach adequately fits the experimental results.
2 Theory
2.1 PA pressure generated by point-like source
In the thermoelastic regime, the generation and propagation of PA pressure in an inviscid medium is described by
where \(p(\vec{r},t)\) is the acoustic pressure at location \(\;\vec{r}\) and time t and \(H(\vec{r},t)\) is the energy density per unit time absorbed in the sample. If all of the absorbed optical energy is converted to heat, \(H(\vec{r},t)\) is a heating function; c is the speed of sound, β is the thermal coefficient of volume expansion, and C p is the specific heat capacity at constant pressure. Equation (4) works only in thermal confinement regime.
The left-hand side of Eq. (4) describes the acoustic wave propagation, while the right-hand side represents the source term. It is important to note that the source term is expressed as the first derivative of the heating function \(H(\vec{r},t)\) with respect to time t. This means that constant heating does not produce a pressure wave; only a change in heating does.
In terms of the velocity potential, \(\varphi (\vec{r},t),\) Eq. (4) becomes
and the pressure and the velocity potential are related by
where ρ is the density of the sample and propagation medium.
Assuming the PA pressure is not reflected on the detector surface, boundary conditions for Eqs. (4) and (5) are at infinity, and the PA pressure produced by a point-like source instantaneously is obtained by solving
where \((\vec{r}_{0} ,t_{0} )\) are the position of the source and time in which the PA pressure was generated, and δ is the Dirac delta function.
For a boundary-free infinite acoustic medium, the solution of Eq. (7) is given by a retarded Green function [16],
From Eq. (6), the expression for the temporal and spatial impulse for a point source is:
In Eq. (9) E A is the energy absorbed by a point source at t 0 = 0. For a pulsed beam with Gaussian temporal profile of width 1/e equal to τ, the pressure is given by [17]
Substituting Eqs. (9) in (10), and taking into account Eq. (6), we get [2]
in which \(p_{0} = \frac{{4\beta E_{A} }}{{\pi^{3/2} c\tau^{3} C_{p} }}\). Equation (11) describes the impulse pressure generated by a point-like source at position \(\vec{r}_{0} ,\) detected at position and time \((\vec{r},t).\)
2.2 Detection model
Because of the nature of the PA pressure wave and given that the region of detection is typically in the first centimeters in the proximity of the source, for this case the measurement process must be in the near field of the acoustic wave. If the detection process is performed using piezoelectric films, (see Eqs. 1–3), the shape of the wavefront and sensor must be taken into account, since both factors influence the measurement process. In the case of a point-like source, a spherical wavefront is produced at \(\vec{r}_{0}\) and impinges on the surface of the sensor at \(\vec{r}.\) Our approach to the problem takes into consideration the fact that the sensing surface is parameterized by a function \(f(\vec{r})\); its normal vectors can be calculated as a function of the position. We suppose that the sensing surface can be handled as a set of point-like sensors located on a spaced grid and electrically connected in parallel, in so far as the area of each element tends to be infinitesimal. The discretization of the sensing surface allows a homogeneous stress incidence (plane wave) on each grid element. To accomplish this, we must know the incident pressure component on each element of the grid in the normal surface direction; because, as stated earlier, the charges are transferred through the film thickness. In order to find an expression to describe this process, we rewrite Eq. (1) explicitly as
with d ij , the piezoelectric coefficients, given for poled ceramics and films with randomly oriented crystallites. For this case, they correspond to the same matrix elements as crystals which belong to the point group 6 mm [15, 18]. It is noteworthy that, in general, each element of area of the sensing surface has its own local coordinate system, where axis 3 always corresponds to the normal vector of the area element. In our approximation, the area of a point-like sensor tends to be zero and the thickness remains constant. Then X j , j = 1, 2, 4, 5, are negligible for each infinitesimal area element in the discretization because the stress component that polarizes the film is applied in a direction parallel to the surface normal. Thus,
With a spherical wavefront in the near field, we cannot assume a planar incidence on the total film surface, however on each element of the grid it can be assumed. The schematic representation shown in Fig. 2, corresponds to the propagation and detection of the acoustic wave. It includes the right-handed coordinate system, where \(\hat{e}_{i} ,\) i = 1, 2, 3 are the unitary vectors in the x, y and z directions respectively. Let \(\hat{n}(\vec{r})\) be the unitary vector normal at the area element localized at \(\vec{r},\) and \(\vec{l}\) the vector from the point source to the center of the front surface of each grid element. Outgoing spherical waves propagate in radial direction. Then \(\hat{l}\) is the direction of the incident wave field on the sensing surface. For a point-like sensor, the PA pressure expressed by Eq. (11) becomes a stress vector when it interacts with the piezoelectric material. It is the dot product between \(p(\vec{r} - \vec{r}_{0} ;t)\hat{l}\) and the axial normal stress component, as
The average charge \(\bar{q}\) generated by the finite sensor, taking the nonzero component of \(\vec{D},\) is then
where \(\bar{D}_{3}\) is the average charge density, and V is the volume of the sensor.

Spherical wavefront impinges on the discretized sensing surface. The X 3 stress component is obtained by projecting the incident pressure in the \(\hat{l}\) direction, onto the surface normal \(\hat{n}\) at each grid element within the sensing region
Because each point-like sensor is very thin and its area approaches zero, \(\vec{l}_{i} = \vec{r}_{i} - \vec{r}_{0}\) and \(p(\vec{r}_{i} - \vec{r}_{0} ;t)\) can be considered as a constant in its element of volume and the integral in Eq. (15) becomes
and for the average PA pressure
where N is the number of grid elements within the effective sensing area, A, and a is the point-like sensor area respectively. Equation (16a) shows, how to obtain the output signal produced on the sensor, taking into account its geometry and dimensions; it describes the temporal behavior for the output signal produced by a point-like source. Summation is performed over grid elements within the sensing region. We assumed that detection geometry remains unchanged during the time interval in which detection is performed.
2.3 Impulse response
Until now, Eq. (16a) did not involve the electrical features of the sensor nor the acquisition elements (cable and oscilloscope). To predict the output signal measured in the experimental process, in addition to the geometry and sensor dimensions, the impulse response (ir) of the entire acquisition system must be taken into account. The output signal of the system U(t) in time-domain is equal to the convolution of the input function \(\bar{q}(t)\) and the ir function, I(t):
In practice, we do not measure \(\bar{q}(t)\) directly because the impulse response of the system used to obtain the PA pressure is not a delta function [19].
Since our approach considers a detector conformed by point-like sensors, Eq. (17) must be satisfied for each point sensor. Assuming the same ir for each, the measured signal is
As previously, the summation is performed over grid elements inside the sensing region on the discretized surface. In Eq. (18) it is assumed that I i (t) = I(t) for each point-like sensor. Eq. (18) represents the experimentally-measured signal. Because we do not have an electrical model for the sensor, the impulse response will be studied in Sect. 4.
3 Numerical approach for the average of the PA pressure
Figure 3 shows the simulation of the normalized PA pressure described by Eq. (11) at \(\vec{r} = 0\) as a function of time due to a point source at \(\vec{r}_{0} = d\hat{e}_{3} .\) The parameter values for simulations were d = 1, 5, 10 and 15 cm, τ = 10 ns, and c = 1,500 m/s. The figure shows both the time interval (Δt) between maximum and minimum of amplitude, and the peak-to-peak (PP) amplitude.

Normalized PA signal predicted by Eq. (11) as a function of time for a point source and punctual detection. Temporal width (∆t) and peak to peak (PP) amplitude are shown. The antisymmetric behavior and temporal width of PA signal remains unchanged when d is modified
Based on Eq. (16b), we studied the behavior of the average PA pressure produced by a point-like source over the surface of a circularly-shaped sensor with 10 mm diameter. The sensor surface was located on the x–y plane and discretized into a grid of equally-spaced elements. Let n be the linear density of grid elements on a side of a square plane. Then, there is n × n elements over the whole plane. The square grid was reduced to a circular one, considering those elements whose center belongs to the circular sensing area. To get an optimal discretization of the plane on which the sensing surface is located, we examined the PA signal behavior at different grid sizes. The d, τ and c were unchanged while n was modified.
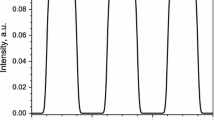
Plots in Fig. 4 show the average PA pressure obtained for n = 50, 200, 400, and 500, with d = 1 cm. The computed pressure was normalized to the maximum amplitude obtained in the corresponding time interval. Figure 5 shows the PA pressure for d = 0.1 cm and different n values. Once again the artifacts are significant for n = 500 up to n = 700. Figure 6 shows a log–log plot for Δt variations in the PA pressure predicted by Eq. (16a) for different n and d values. The average PA pressure for different values of d with n = 500 is shown in Fig. 7, where retarded time is with respect to the appearance of the PA wave in time, i.e. its maximum amplitude value.

PA signal behavior considering a point source and a discretized circular shaped sensor. The value n × n denotes the discretization size of the sensing plane. The distance from the source to the center of the sensor is d = 1 cm

Simulated PA signal shape for different values of n when d = 0.1 cm. For a n = 500 and b n = 600 the maximun amplitude of the artifacts is in the order of 102 according to plots (c) and (d). For e n = 700 and f n = 800 the amplitude of the artifacts is in the order of 103 according to plots (g) and (h)

The corresponding values of ∆t when the discretization size, n, varies. The distance from the source to the center of the sensor, is in the range of 0.1 cm to 60 cm

PA signal for different values of d. The waveform approximates the predicted signal for a punctual system of sensor and source when d increases
4 Experimental study
4.1 Experimental setup
A schematic representation of the experimental set-up for the ir measurements is shown in Fig. 8a. A Q-switched Nd: YAG laser (Brilliant, Quantel) was used to provide 532-nm light with 10 ns pulse duration and beam fluency rate of 10 Hz. The laser beam was expanded using a lens up to 10 mm diameter, and directly delivered over the sensing area of a piezoelectric transducer (Panametrics, V383-SU, frequency of 3.5 MHz and 10 mm diameter), which was completely covered with a blacked aluminum foil, using a thin layer of ultrasound gel as coupler medium between both elements. Laser fluence over the aluminum foil was 100 mJ/cm2, with a spot size of 10 mm. A digital oscilloscope (Tektronix DPO 2014, C = 1 pF and R = 1 MΩ) was used to acquire and store the PA signal.

Schematic representation of experimental setup for a obtaining the impulse response and b the point-like source signal
The obtained ir signal is shown in Fig. 9, where the principal peaks appear in the range from 0 to 1 μs. In order to generate the convolved signal of Eq. (18), the ir was approximated using the first four peaks (from left to right in Fig. 9) which shape is Gaussian type. Thus, the ir was fitted through a summation of four different Gaussian functions; the fitting parameters were the standard deviation, the mean, and the amplitude. The resulting fitting function and the average pressure were used in Eq. (18) to simulate the output PA signal.

Temporal ir for the detection system conformed by sensor, cable, and oscilloscope
The schematic representation of the experimental setup for the point-like source experiment is shown in Fig. 8b. The lens was replaced in order to focus the beam up to 0.5 mm diameter; the PA cell (cylindrical container) is located between the lens and the transducer.
The sample was a circular piece of black rubber with 5 mm diameter and 1 mm thickness. It was attached to the inner part of the base of a water-filled PA cell. Laser pulses passed through a centered circular aperture on the cylinder base and illuminated the sample, giving rise to a PA pressure field. The sensor was inside the PA cell, located 4 cm away from the rubber sample. Given the diameter of focused laser beam, the sensor diameter, and the thickness of the rubber sample, the generated PA pressure corresponds to a point-like source.
4.2 Convolved output signal from a point-like source and experimental data
To simulate the output signal corresponding to the PA pressure of the Eq. (16a), we considered a point-like source located over z-axis with d = 4 cm, sensor diameter of 10 mm, laser pulse width τ = 10 ns, and sound speed c = 1,500 m/s (speed of sound in water). In Fig. 10, the behavior of the simulated PA output signal computed from Eq. (18) for both the circular shaped (black line) and point-like sensors (red line) are shown.

Simulated PA signal produced by a point source located 4 cm away from the center of a circular sensor with 10 mm diameter. The signal is compared with the corresponding for a point-like sensor at the same location
The comparison between the experimental (black solid line) and simulated output signals behavior is shown in Fig. 11. The blue dashed line corresponds to the circular sensor; the red dotted line is for the point-like sensor. As can be seen, the simulation for the circular sensor better fits the experimental signal, both in amplitude and temporal width for each peak. To enhance the output signal for the circular sensor, we used the translational degrees of freedom. Figure 12 shows the better result, adjusting the center of the sensor at x = 1.5 mm, y = 1.5 mm, and z = 40.3 mm.

Comparison between experimental (black solid line) and simulated output signal behavior. The blue dashed line is for the circular sensor and red dotted line for the point-like sensor

Comparison between experimental (black solid line) and simulated output signals (red dashed line) with the center of the sensor at x = 1.5 mm, y = 1.5 mm, and z = 0.3 mm
4.3 The case of a high frequency transducer
As shown in Fig. 9, the ir for the sensor with 3.5 MHz bandwidth has a temporal width close to 800 ns, that is, 80 times the laser pulse duration. To improve the temporal resolution (and consequently spatial resolution for source detection) we investigated the signal produced by a recently reported high frequency transducer (Olympus, V2062, 125 MHz and 0.125 in. diameter) which has been used in photoacoustic microscopy studies [20]. The experimental process described in Sect. 4.1 was held, only interchanging the transducer and including a general purpose amplifier (Mini-Circuits, ZFL-500-BNC) and focusing the beam up to 0.2 mm diameter. Additionally, the transducer was protected for water immersion. The corresponding ir is shown in Fig. 13; we can notice that the time interval Δt is less than 100 ns. The signal to noise ratio was decreased and the ir approximation was achieved through fitting a summation of two different Gaussian functions (red line in Fig. 13).

Temporal ir for the detection system conformed by high frequency sensor, amplifier, cables, and oscilloscope
The comparison between the experimental (black solid line) and simulated output signals behavior is shown in Fig. 14. The blue dashed line corresponds to the circular sensor and the red dotted line is for the point-like sensor.

Comparison between experimental (black solid line) and simulated signals. The blue dashed line is for the high frequency circular sensor and the red dotted line for a point-like sensor
5 Results and discussion
From Fig. 4, we note that the PA pressure is preserved antisymmetrically as a function of time and the amplitude decreases as d is increased (see Fig. 3). Plots in Fig. 4 show the average PA pressures obtained for n = 50, 200, 400, and 500 with d = 11 cm. The computed pressure was normalized to its maximum amplitude value obtained in the corresponding time interval. In Fig. 4a we observe an artifact due to the size of discretization, which decreases as the value of n increases (Fig. 4b, c, d). For n = 400, the artifact on the PA signal has an order of magnitude 10−5 with respect to the maximum (Fig. 4e); at n = 500 it is reduced to 10−7 (Fig. 4f). This n value can be considered as a good discretization; however, as can be seen in Fig. 5, the PA pressure for d = 0.1 cm, the artifacts become significant for n = 500 up to n = 700. This means that discretization size depends on the distance between the source and the area of the transducer.
On the other hand, for n > 500 and d > 0.1 cm, even when the PA signal exhibits an antisymmetrical amplitude according to Eq. (11), its temporal width ∆t increases as the source is closer to the surface (Figs. 4, 5, 6). Such behavior is not predicted by the point-like sensor approach.
If we focus on the temporal analysis (∆t behavior) of the PA signal as function of d, Fig. 6 shows that starting from n = 200, all discretizations predict the same values for ∆t. It is important to emphasize that ∆t in the average pressure shows a monotonic decreasing behavior, which tends to the value predicted by Eq. (11) for sufficiently large d and therefore converges to the value predicted by the point-like sensor approach; this tendency is also observed in Fig. 7. This is in agreement with the fact that under the far field condition, a spherical wavefront becomes a planar one. To obtain an adequate description of the PA signal, it is clear that the geometry of the sensor must be taken into account when the source is near the sensing surface. According to the laser pulse duration and the total pressure calculated before the convolution process, we found that the sensor can be considered a point-like for d > 80 cm.
Since the transducer produces an electrical signal from a mechanical stimulus, its temporal response is affected by electrical (including the impedances, transducer features, cables, and oscilloscope) and mechanical factors. The ir in Figs. 9 and 13 show the response not only for the piezoelectric transducer, but for the entire set. From the mechanical point of view, the response of the material depends on the d ij coefficients in Eq. (12) and must be included.
According to Eq. (16a) the applied mechanical stress produces an effective charge between the parallel electrodes of the piezoelectric film. Nevertheless, in the oscilloscope, a current is measured. This is evidenced in the shape of the ir in Figs. 9 and 13, where the first two Gaussian functions approximate the behavior of a Gaussian derivative. Then, the ir dictates that the detection system is sensitive to variations in the electrical charge generated between the electrodes; i.e. pressure variations are detected.
5.1 Low frequency transducer
According to Fig. 9, the ir is modeled as a summation of four Gaussian functions; the last two are considered as a result of mechanical processes involving underdamping due to the mechanical interaction between the piezoelectric material and the backing material.
Two things must be highlighted in considering the convolved output signal from a point-like source (Fig. 10). First, the output signals are rescaled in time, being the entire signal from the point-like sensor shorter than that obtained by the circular sensor. This can be explained because the PA wave is delayed in regions away from the center of the finite sensor. Comparing the simulations with the experimental data, we note that the circular sensor simulation better fits the experimental signal, both in the amplitude and the temporal width of each peak (Fig. 11). Second, the finite size of the circular sensor allows five degrees of freedom (three of translation and two of rotation), in contrast to the point-like sensor, which allows just one (distance). We must also take into account uncertainties in the relative position of the source and sensor. As a first approximation, we used the translational degrees of freedom (Fig. 12) to enhance the correspondence between experimental and simulated output signals for the circular sensor. This assumption yields a better fit between both signals. The variations in sensor position are in the range of the experimental uncertainties.
5.2 High frequency transducer
For this transducer, the ir was modeled as a summation of two Gaussian functions and has duration less than 100 ns, compared to the low frequency transducer for which the ir was approximately 900 ns and four Gaussians.
Comparing the simulated and experimental signals in Fig. 14, we note that the predicted signals (both point source-point sensor and point source-finite sensor) do not match with the corresponding experimental data. Differences are observed in both, signal shape and temporal width. With respect to the signal shape, as mentioned above, it should be noted that in the system integrated by the point source and point-like sensor additional degrees of freedom cannot be considered. Then, for the experimental setup used, the model of point source and point-like sensor does not allow us to obtain a predicted signal shape to adequately fit the shape of experimental data. On the other hand, the second feature to be resolved is the temporal width of the signal. In Fig. 14 we note that the predicted signals are narrower than the experimental one. Because the absence of additional degrees of freedom, the model of point source and point-like sensor do not allow us to adequately fit the simulated signal to the experimental data. Furthermore, a point to be highlighted about the transducer used in this study is that a spatial resolution lower than 10 μm in source detection has been reported recently [20]. In order to explain the differences in temporal width between simulated and experimental signals we have to take into account a finite sensor (and its corresponding degrees of freedom) and a finite source. For this, now we will consider that the laser energy was delivered up to certain depth inside the rubber sample, as a first approach, this PA source may be modeled as a line.
We simulated a 100 μm line source, which consists of point sources separated 1.5 μm and taking a variation in the rotational degrees of freedom of the sensor. Figure 15 shows the obtained experimental and simulated signal for the case of finite sensor, where a sensor rotation of 3.3° about y-axis was performed. A temporal widening in simulated signal accomplishing a better fit to the experimental data was obtained.

Comparison between experimental and simulated signal considering a line source and the high frequency circular sensor. Simulation considered the sensor was rotated 3.3° about the y-axis during the detection process
For high frequency sensors, according to experimental and theoretical results in Fig. 15, we show that both sensor and source dimensions are significant to get and adequately prediction of experimental signals. It is relevant to emphasize that it seems that the experimental setup proposed to approximate a point-like source is not good enough for the high frequency sensor.
6 Conclusions
The effect of sensor size and geometry have been studied, using discretization and assuming that each element of volume behaves as a point-like sensor working in parallel. Because the size of each volume element is small, we considered the incident PA wavefront as constant. This enabled us to model the mechanical interaction between the sensor and the PA wavefront. The output signal was obtained by the convolution of the temporal ir of the entire detection system (experimentally obtained) and the prediction of the mechanical model.
Given the assumption of point-like sensors working in parallel, individual responses would be required to obtain the individual contribution to the detected PA signal. Then, the same mechanical impulse acting on each point-like sensor is sufficient. This was achieved, illuminating the entire sensing surface of the commercial transducer.
The characteristic response of a sensor remains constant throughout the observation and is independent of the sample that generates the wavefront. Nevertheless, in the PA measurement process, the ir depends on the relative distance between the sample and the surface element of the transducer. For each possible relative position sensor-source, the ir must be measured. The latter, from an experimental point of view, is clearly not feasible. However, we showed that the mechanical interaction model enabled us to use the response of the entire set of point-like sensors instead of individual responses.
If the sample is located far away from the sensor, the simulation predicts that the PA wavefront becomes flat. Thus, the output signal predicted by the realistic model matches the signal for a point-like source.
The convolution of the PA pressure with the ir causes uncertainty in the source location. One way to improve this feature is to explore deconvolution algorithms for the PA signal in order to obtain only the PA pressure.
To improve the measurement process, the ir must be as narrow as possible. Achieving this implies an increasing relevance in geometry for both the transducer and the source. If the objective is the source location, low frequency transducers will decrease the sensitivity in such process. On the other hand, the high frequency transducer will enhance source location but geometry aspects of the transducer become significant to have a suitable signal reconstruction.
References
L. Wang, Photoacoustic imaging and spectroscopy (Taylor & Francis, New York, 2009)
R. Pérez-Solano, F.I. Ramírez-Pérez, J.A. Castorena-González, E. Alvarado-Anell, G. Gutiérrez-Juárez, L. Polo-Parada, AIP Adv. 2, 011102 (2012)
G. Gutiérrez-Juárez, S.K. Gupta, M. Al-Shaer, L. Polo-Parada, S.D. Paul, C. Papagiorgio, J.A. Viator, Lasers Surg. Med. 42, 271 (2010)
G. Gutiérrez-Juárez, S.K. Gupta, L. Polo-Parada, P.D. Dale, C. Papagiorgio, J.D. Bunch, J.A. Viator, Int. J. Thermophys. 31, 784 (2010)
M. Xu, L.V. Wang, Rev. Sci. Instrum. 77, 041101 (2006)
B.T. Cox, B.E. Treeby, Proc. SPIE 7564, 75640I (2010)
R. Nuster, S. Gratt, K. Passler, G. Paltauf, H. Grün, Th. Berer, P. Burgholzer, Proc. SPIE 7177, 71770T (2009)
M. Hejazi, M.D. Abolhassani, A. Ahmadian, M. Frenz, M. Jaeger, J.J. Niederhauser, A. Amjadi, Arch. Med. Res. 37, 322 (2006)
T.L. Szabo, P.A. Lewin, J. Ultras Med. 26, 283 (2007)
H. Schoeffmann, H. Schmidt-Kloiber, E. Reichel, J. Appl. Phys. 63, 46 (1988)
G. Paltauf, H. Schmidt-Kloiber, H. Guss, Appl. Phys. Lett. 69, 1526 (1996)
M. Frenz, G. Paltauf, H. Schmidt-Kloiber, Phys. Rev. Lett. 76, 3546 (1996)
L.V. Wang, X. Yang, J. Biomed. Opt. 12, 14027 (2007)
V.G. Andreev, A.A. Karabutov, A.A. Oraevsky, IEEE Trans. Ultrason. Ferroelect. Freq. Contr. 50, 1383 (2003)
D. Damjanovic, Rep. Prog. Phys. 61, 1267 (1998)
J.D. Jackson, Classical Electrodynamics (Wiley, New York, 1998)
G. Paltauf, H. Schmidt-Kloiber, J. Appl. Phys. 82, 1525 (1997)
G.M. Sessler, J. Acoust. Soc. Am. 70, 1596 (1981)
R.A. Kruger, D.R. Reinecke, G.A. Kruger, Med. Phys. 26, 1832 (1998)
C. Zhang, K. Maslov, J. Yao, L.V. Wang, J. Biomed. Opt. 17, 116016 (2012)
Acknowledgments
The authors would like to acknowledge the financial support of the Dirección de Apoyo a la Investigación y al Posgrado (DAIP) of the Universidad de Guanajuato. The authors want to thank Joaquín Peña Acevedo, Ph. D., for his helpful comments and suggestions to this work.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Bravo-Miranda, C.A., González-Vega, A. & Gutiérrez-Juárez, G. Influence of the size, geometry and temporal response of the finite piezoelectric sensor on the photoacoustic signal: the case of the point-like source. Appl. Phys. B 115, 471–482 (2014). https://doi.org/10.1007/s00340-013-5627-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00340-013-5627-7