
Abstract
We present a simple and flexible frequency offset locking scheme developed for high-field imaging of ultra-cold atoms which relies on commercially available RF electronics only. The main new ingredient is the use of the sharp amplitude response of a “home-made” RF filter to provide an error signal for locking the lasers. We were able to offset lock two independent diode lasers within a capture range of hundreds of MHz, and with a tuning range of up to 1.4 GHz. The beat-note residual fluctuations for offset locked lasers are below 2 MHz for integration times of several hundreds of seconds.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
When absolute laser frequency stabilization is required, it is customary to lock the frequency of the laser to an atomic standard, such as in saturated absorption spectroscopy. An alternative solution is to lock the laser to be frequency stabilized to a further (master) laser operating at a known frequency, via an optical phase-locked loop [1]. However, when phase coherence between two such lasers is not required, there are simpler locking methods, which also utilize a master laser, and which have lower bandwidth requirements, such as frequency offset locking.
Frequency offset locking schemes work by interfering two lasers at a beam-splitter and detecting the beat-note ω BN with a fast photo-diode. By locking ω BN to a constant fixed value an active feedback system ensures a fixed offset between the master and slave lasers. It is then possible to offset the two lasers by an arbitrary amount (within the scope of the given locking scheme) by mixing the beat signal with an external local oscillator (LO) at a given known frequency (ω LO). In order to compensate for frequency drifts and stabilize the two lasers to a constant offset an error signal is generated and a feedback correction is supplied to the slave laser by means of a servo controller loop.
The main distinction between different offset locking schemes is due to the method for generating the error signal to servo-lock the slave laser to the master laser. In [2, 3], the authors present a method which utilizes an electronic delay line in order to produce a frequency dependent phase shift. However, a drawback of such a scheme is the limited capture range due to the presence of several zero-crossings in the error signal, which result in multiple lock points. Another possibility for generating the error signal is to use a commercial frequency-to-voltage converter [4], though such converters are not usually available at high operating frequencies and their cost can be a limiting factor. Here, we present a very flexible and affordable scheme for frequency offset locking which is based on generating the error signal from the amplitude response of a home-built RF electronic filter. The advantage of this scheme is that the error signal response is linear (within the working range of the electronic components) and thus provides for a unique zero point for offset locking the lasers in an arbitrary frequency range (i.e. up to several GHz) only limited by the bandwidth of the electronic components. Furthermore, the scheme is based on commercially available electronics only and thus simplifies the design requirements of [5], while still providing for a similar performance, as quantified for instance by the capture range. We expect such simple and efficient frequency offset locking scheme to be of interest to the ultra-cold atom community.
2 Applications: high field imaging
The ability to image clouds of ultra-cold atoms at high magnetic fields has several advantages. Switching off large magnetic fields takes a characteristic time of hundreds of μs due to the inductance of the magnetic coils, and thus such a measurement cannot be considered instantaneous. This would be an impediment for instance in the study of nonequilibrium dynamics. Furthermore, in strongly interacting systems other relevant times scales, such as the coherence time of a superfluid state, can be even shorter than hundreds of μs, and the long range coherence might have decayed after the fields are switched off without allowing enough time for imaging and characterization. However, high magnetic fields can shift the resonant wavelength of the atomic transition to the point where the lasers used for trapping and cooling cannot be used for imaging. In particular, the presence of external magnetic fields modifies the energy sublevels of the two magnetic moments (I,J) coupled by the hyperfine interaction in a nonlinear manner as given by the Breit–Rabi formula [6]. In the limit of strong fields, the hyperfine interaction (I⋅J) is essentially decoupled. In particular, the hyperfine splitting of the ground state of 7Li (\(2 {S}^{2}_{1/2}\)) is subdivided into two manifolds, upper and lower, corresponding to m J =1/2 and m J =−1/2 (high field seeking states), respectively. In Fig. 1, we show the calculated Breit–Rabi splitting due to the presence of an external magnetic field in the range of 0 to 1000 G, a range in which 7Li shows broad Feshbach resonances. The two manifolds contain four sublevels corresponding to m J =±1/2 and |m I |≤3/2 (F=2 and F=1 at B=0). The energy splitting between the upper and lower manifold is of the order of 1.4 GHz for a magnetic field in the range of 700 G. These values are entirely compatible with the tuning range of the offset locking scheme presented here, where the main limiting factor is given by the bandwidth of the fast photodiode and amplifiers and which can be easily increased by using faster detectors with suitable amplification.

Breit–Rabi diagram in 7Li for relevant magnetic field strengths (B). At large external magnetic fields, the hyperfine interaction is decoupled and there are two manifolds (upper and lower) corresponding to m J =±1/2 indicated by dashed and solid lines, respectively. The energy levels are indicated by quantum numbers (m J ,m I ). The energy splitting between the upper and lower manifold is within 1.4 GHz for a magnetic field in the range of 700 G. These values are entirely compatible with the offset locking scheme presented here
3 Offset lock scheme
The frequency offset locking scheme is shown in Fig. 2. The amplified output beat-note (ω BN) of a fiber-coupled fast photo-diode (PD Model: Thorlabs SIR5-FC, bandwidth 2 GHz) is mixed with the RF signal produced by a function generator (Model: SRS SG384, bandwidth 4 GHz), at an RF frequency mixer (Model: Mini-circuits ZFM-11-5+). In our implementation, we used an RF amplifier (LNA-1400 RF Bay) which is suitable for the input–output signal levels required in the circuit. Note that the amplifier bandwidth is 1.4 GHz, which sets an upper limit to the tuning range for the ω BN that can be processed by this circuit. In order to test the level of the amplified beat-note signal, we introduced an RF coupler (CPL1 Model: ZFDC-10-5-S+ Mini-circuits). The signal after the mixer is the convolution of the two incoming frequencies, ω BN and ω LO, in such way that we should obtain both the frequency sum and frequency difference ω +=ω BN+ω LO and ω −=|ω BN−ω LO|. In order to work only with the frequency difference ω −, we use a low pass filter (LP150, Model: SLP-150+ Mini-circuits) which is in the range of the frequency response of our RF filter. The mixed signal after LP150 is also monitored via an output coupler CPL2 at an RF spectrum analyzer and, before locking, it should show a single peak centered at ω −=|ω BN−ω LO|. This frequency difference will eventually be locked to a constant value using the error signal given by the filter response.

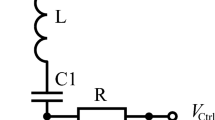
Offset locking scheme using a “home-made” RF filter. The inset shows a graph of the commercial high-pass filter and low-pass filter amplitude response used to produce the error signal
The RF filter is composed of a 50:50 splitter (Model: ZMSC-2-1+ Mini-circuits), a low pass filter (LP70, Model: SLP-70+ Mini-circuits) and a high pass filer (HP70 Model: SHP-100+ Mini-circuits), and two power detectors A and B (Model: ZX47-40LN-S+ Mini-circuits) which provide the different responses for the error signal. The responses of the filters LP70 and HP70 are pictured on the insets of Fig. 2. These filters were chosen because they have a linear decreasing and increasing response, respectively, in the vicinity of the target range of ω −. Since the response of the two detectors is monotonic, and with opposite slopes, there is a single crossing which determines the fixed value ω 0 to which the scheme will lock the signal, which is around 70 MHz. As will be explained below, the exact value of ω 0 depends on the input RF power. When ω −=ω 0 detector A and detector B will detect the same signal and, therefore, there will be no difference (or error) to correct for. Next, when ω −>ω 0, the response from A will be larger than the response from B and, therefore, the difference between A and B (error signal) will be positive. On the other hand, when ω −<ω 0 the response from A is lower than that of B and the error signal will be negative. In this way, we have produced an error signal which has a linear dependence on frequency with which to lock our slave laser. In particular, it should be noted that this locking scheme sets ω −=ω 0. We note that there are two dualities with respect to the locking point. One is due to the actual value of the beat-note, since the sign of ω BN is not known a priori. Nevertheless, the two possible beat-notes are sufficiently far away from each other and should not introduce additional locking points. The second ambiguity is due to the actual sign of ω −=|ω BN−ω LO|, which means that the slave laser can be offset locked to either ω BN=ω LO+/−ω 0. Depending on the LO frequency ranges, this duality can introduce a second zero crossing to lock the lasers which should be offset by roughly 140 MHz. The error signal is fed to a servo controller which supplies a linear feedback to the slave laser current and thus warrants that the two lasers remain at a constant offset, at the expense of modifying the beat-note frequency.
4 Experimental results
Two independent (master and slave) diode lasers (Model: Toptica DL100 and Toptica TApro) centered at 671 nm were used to implement the scheme shown in Fig. 2. The line-width of the lasers is typically of the order of a few hundred kHz and the mode-hop-free region is several GHz wide. The master laser will eventually be locked to the D2 line of 7Li by means of saturated absorption spectroscopy, but it does not require to be locked for the purpose of this (proof of principle) paper. The lasers are coherently combined at a fiber beam-splitter, and from this interference signal we obtain the beat-note. Care should be taken that the two lasers are within a few hundred MHz separation at the start. In order to control the initial frequency difference, we monitored both lasers on a high finesse wavelength meter (WS/7 Angstrom). This beat-note is first amplified and then mixed with the LO at a frequency mixer, as described in the previous section. We observe both the beat-note ω BN and the frequency difference ω − at two consecutive output couplers CPL1 and CPL2, respectively (see Fig. 2).
The experimental results are displayed in Figs. 3, 4, 5 and 6. The input optical power was 540 μW, with equal contributions in both laser modes. The RF spectral traces at different stages of the locking scheme were obtained on a spectrum analyzer display (R3463 Advantest modulation). Figure 3 shows an RF spectral trace of the beat-note, measured at the first output coupler (CPL1), together with a local oscillator trace, measured directly from the function generator, and observed on the display of the spectrum analyzer. The value in this case is ω BN=325 MHz with a full width at half maximum (FWHM) of 10 MHz. We chose this particular value since the difference with a local oscillator centered around 400 MHz gives a frequency in the vicinity of the filter characteristic frequency ω 0. The attenuation per division in the spectral traces is 10 dB.

Beat-note (BN) and local oscillator (LO) spectral traces displayed on same scale. The beat-note was chosen to be ω BN=325 MHz and the LO frequency was ω LO=400 MHz. The attenuation/div is 10 dB

Measured beat-note frequency ω BN (in MHz) for different LO frequencies ω LO. When the lasers are not offset locked (dashed line), there is no correlation between these two frequencies, and ω BN remains in the vicinity of 325 MHz independently of ω LO. When the lasers are offset locked (solid line) there is a linear dependence between ω BN and ω LO due to the offset constraint ω 0=|ω BN−ω LO|

Measured unlocked error signal as a function of LO frequency showing the linear response of the RF filter, as well as the capture range. The zero of this error is used to offset lock the lasers. The power level in the beat-note was tuned to 20 dB m and 15 dB m by changing the input optical power. For low input RF powers, there is a clear degradation of the performance of the filter mainly due to low mixer performance

Beat-note signal vs. time for (a) offset locked lasers and (b) unlocked lasers. The frequency fluctuations during an integration time of 325 s are (a) within 2 MHz and (b) within 20 MHz. The standard deviation (σ) of each sequence are (a) σ a =0.54 and (b) σ b =5.54, respectively. Inset shows an histogram of frequencies in MHz
In order to test the locking capacity of the scheme, as well as the range of LO frequencies (ω LO) and beat-note frequencies (ω BN) for which the two lasers remain locked we measured the beat-note for different LO frequencies on a spectrum analyzer both for the locked and unlocked case. In Fig. 4, we show the measured ω BN for different LO frequencies in the range of 200 MHz to 600 MHz both when the lasers are locked (solid line) and unlocked (dashed line). As expected, for the unlocked case ω BN is independent of ω LO, and fluctuates around a nominal value of 325 MHz, due to laser frequency drift. On the contrary, when the two lasers are offset locked there is a linear dependence between the LO and beat-note frequency due to the offset constraint ω −=|ω BN−ω LO|. For LO frequencies higher than 400 MHz, the lasers are unlocked, and we note the appearance of a mode-hop for an LO frequency in the range of 500 MHz. This might indicate that the feedback loop tries to lock the laser to the next locking point, given by the duality in ω −=ω BN−ω LO and ω −=ω LO−ω BN.
The error signal is obtained from the “Error Monitor” channel in the servo controller (Model New Focus LB1005) by subtracting the measured powers in detectors A and B (Fig. 2), and configuring the servo as a pure proportional controller. This signal, in turn, is used to provide a linear feedback on the current of the slave diode laser. Better long-term stability can be obtained by feeding back onto the laser piezo, though for this first demonstration we found that a feedback on the current was enough. The error signal should be within the voltage range of the diode laser and is adjusted by setting the gain of the servo lock box. The output offset in the servo controller is set to zero to ensure that the lasers are locked to the zero crossing of the error signal.
Figure 5 shows the error signal obtained by subtracting the output power in detectors A and B at the servo controller for different LO frequencies, in the range of 250 MHz to 400 MHz. We note that the capture range is of the order of hundreds of MHz with a unique zero crossing within a range of roughly 140 MHz, due to the duality sign in the frequency difference. We also note that in a range of roughly 10 MHz around the locking point, the response of the filter is linear and with a steep slope, as expected.
Next, we measured the error signal for different input powers in the beat-note of 15 dB m and 20 dB m. The different RF powers were obtained by changing the input optical power. Another possibility is to use RF attenuators in the circuit. As expected the zero crossing depends on the input power, due to the dependence of the response of the mixer and filters on the input power level. We note that the performance of the filter is significantly degraded for input powers below 15 dB m.
Finally, we characterized the frequency stability of the offset locked beat-note (ω BN) over time by sampling ω BN at a repetition rate of Hz over an integration time of 325 s; this is shown in Fig. 6. When the two lasers are not offset locked (Fig. 6(b), dashed line) the beat-note fluctuates over time within a range of roughly 20 MHz, for an integration time of 325 s. While, for offset locked lasers (Fig. 6(a), solid line), frequency fluctuations are within a few MHz. The standard deviation (σ) of each sequence is σ a =0.54 and σ b =5.54, for offset locked and unlocked lasers, respectively, showing a 10-fold reduction in σ for the offset locked case. The inset shows an histogram of the frequencies during the integration time, showing a discontinuous drift over tens of MHz in the unlocked case (b), and a continuous drift (no mode-hops) within less than 2 MHz for the locked case (a).
In order to further inspect the temporal stability of our scheme, and compare with previous proposals, we calculated the Allan deviation, i.e., the square root of the Allan variance [7], for a typical subsequence of data characterizing the beat-note frequency for locked lasers, as shown in Fig. 7. While the Allan deviation for integration times longer than a minute approaches 0.5 kHz, which represents a comparable long-term stability with respect to previous schemes [5], we obtained that for short integration times the deviation can be below 5 kHz, thus revealing that the short-term stability of the scheme presented here is superior that the one reported in previous implementations [5]. We also note that the long-term stability of our scheme could in principle be further improved by feeding back on the slave laser piezo.

Allan deviation for measured locked beat-note frequencies during an integration time of approximately 100 seconds. While the deviation for short times is below 5 kHz, it drops to within 0.5 kHz for longer integration periods. This reveals that the short-term stability of the current scheme is superior than in previous proposals [5]
5 Discussion
Some considerations for the optimal performance of the scheme are required. First, both the master and slave lasers should be as single mode as possible so that the beat-note can be characterized by a sharp peak in the spectrum analyzer (FWHM 10 MHz) within a sufficiently large offset frequency range (at least 1 GHz). Mode hopping will broaden the beat-note and reduce the performance of this locking scheme.
Next, the total optical power in the beat-note should be in the range of 500 μW, with both lasers having similar contributions in order to increase the visibility in the beat-note. Such input power should produce a signal at the first output coupler CPL1 of at least 20 dB m (see Fig. 5). Also, when interfering the two relevant lasers it is convenient to use a fiber beam splitter to obtain a cleaner beat note.
The LO frequency should be sufficiently large (>200 MHz) for the low-pass filter LP150 to filter the sum frequency ω BN+ω LO. The lasers should be sufficiently close so that the difference between the LO frequency and the beat-note signal is well below 150 MHz. As mentioned previously, the capture range of the locking scheme can be arbitrarily increased by choosing a broader low-pass filter.
Finally, a clear signature of the good performance of the offset locking scheme can be obtained by observing the difference frequency |ω BN−ω LO| on the second output coupler. When the lasers are not locked, this difference should be arbitrary and below 150 MHz; while this difference should be fixed at the characteristic filter frequency ω 0 when the two lasers are locked. Note that the characteristic frequency ω 0 is in the range of 70 MHz, but the specific value depends on the RF input power. In this implementation, we have ω 0=67.96 MHz.
6 Conclusions
We have successfully demonstrated a very simple and flexible scheme for laser frequency offset locking based on the linear response of a “home-made” filter which relies on commercially available RF electronics only and, therefore, simplifies the design requirements of previous schemes [5], while providing for a similar locking performance. Two independent diode lasers were offset locked within a capture range of several hundreds of MHz. The capture range of this scheme is only limited by the bandwidth of the filters and can be increased arbitrarily. The tuning range, in turn, is 1.4 GHz and is only limited by the amplifier bandwidth. We plan to use the current scheme for high field imaging of ultra-cold 7Li.
References
G. Santarelli, A. Clairon, S.N. Lea, G.M. Tino, Opt. Commun. 104, 339 (1994)
H.N. Rutt, J. Phys. E 17, 704 (1984)
U. Schünemann, H. Engler, R. Grimm, M. Weidemüller, M. Zielonkowski, Rev. Sci. Instrum. 70, 242 (1999)
T. Stace, A. Luiten, R.P. Kovacich, Meas. Sci. Technol. 9, 1635 (1998)
G. Ritt, G. Cennini, C. Geckeler, M. Weitz, Appl. Phys. B 79, 363 (2004)
D.A. Steck, 87Rb D Line Data. http://steck.us/alkalidata/rubidium87numbers.1.6.pdf
F. Walls, D. Allan, Proc. IEEE 74, 162 (1986)
Acknowledgements
The author acknowledges Wolfgang Ketterle, Aviv Keshet, Edward Su, Christian Sanner, and Thomas Rigaldo for useful discussions and technical support. The author is thankful to David Weld for a critical reading of the manuscript. This work was supported by the NSF through the Center for Ultracold Atoms, by NSF award PHY-0969731, through an AFOSR MURI program, and under ARO Grant No. W911NF-07-1-0493 with funds from the DARPA OLE program.
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
Rights and permissions
About this article
Cite this article
Puentes, G. Laser frequency offset locking scheme for high-field imaging of cold atoms. Appl. Phys. B 107, 11–16 (2012). https://doi.org/10.1007/s00340-012-4898-8
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00340-012-4898-8