
Abstract
Studies have shown that pelagic predators do not overlap with their prey at small scales. However, we hypothesized that spinner dolphin foraging would be affected by the spatio-temporal dynamics of their prey at both small and large scales. A modified echosounder was used to simultaneously measure the abundance of dolphins and their prey as a function of space and time off three Hawaiian islands. Spinner dolphin abundance closely matched the abundance patterns in the boundary community both horizontally and vertically. As hypothesized, spinner dolphins followed the diel horizontal migration of their prey, rather than feeding offshore the entire night. Spinner dolphins also followed the vertical migrations of their prey and exploited the vertical areas within the boundary layer that had the highest prey density. Cooperative foraging by pairs of dolphins within large groups was evident. The geometric and density characteristics of prey patches containing dolphins indicate that dolphins may alter the characteristics of prey patches through this cooperative foraging. The overlap of Hawaiian spinner dolphins and their prey at many temporal and spatial scales, ranging from several minutes to an entire night and 20 m to several kilometers, indicates that the availability of truly synoptic data may fundamentally alter our conclusions about pelagic predator-prey interactions.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The concepts of patchiness and scale have become essential in the study of predator-prey interactions (Fauchald et al. 2000) because the distribution of prey has a strong effect on the energetic gains and costs of foraging (Tiselius et al. 1993), foraging success, and overall predator performance (Boyd 1996). To be successful, a predator must continuously track changing prey patterns and respond to complex heterogeneity at different spatial and temporal scales (Russell et al. 1992). Spatial heterogeneity, or patchiness, of physical characteristics and organisms is a general phenomenon in the ocean (Steele 1978). However, the rapidly changing spatial structure of the ocean's biomass makes it difficult to assess pelagic prey fields. This, along with the range of scales over which both prey and predators are distributed and the general inaccessibility of pelagic animals, has limited the number of studies on pelagic predator-prey systems.
Coherence between predators and their prey, at both large and small scales, is common in terrestrial (Ives et al. 1993; Zhang and Sanderson 1993) and aquatic systems (Muotka and Penttinen 1994; Morgan et al. 1997; Greco et al. 1999; Stewart and Jones 2001). However, in marine pelagic systems, most studies have not found small-scale overlap (less than 10 times the predator's body length) between predators and prey (Rose and Leggett 1990). Weak or ephemeral spatial associations between the predators and their pelagic prey (Russell et al. 1992; Greene et al. 1994; Goss et al. 1997; Mehlum et al. 1999), and even negative relationships (Logerwell and Hargreaves 1996) are commonly reported. These results have led to many new hypotheses to explain why pelagic predators and prey do not correlate, because some coherence between predators and prey would be expected (Mason and Brandt 1996). These hypotheses are usually specific to the group of animals being studied (Russell et al. 1992; Greene et al. 1994; Logerwell and Hargreaves 1996; Goss et al. 1997; Mehlum et al. 1999). However, many researchers (Logerwell and Hargreaves 1996; Goss et al. 1997; Mehlum et al. 1999) agree with the conclusion of Russell et al. (1992) that "traditional foraging models do not adequately describe resource acquisition in marine environments", suggesting that pelagic predator-prey systems are fundamentally different from other systems.
Spinner dolphins have a pan-tropical pelagic distribution. Hawaiian spinner dolphins (Stenella longirostris longirostris), however, reside in coastal waters. Norris et al. (1994) hypothesized that spinner dolphins in Hawaii feed in deep water offshore at night on small (5–10 cm long) fishes, shrimps, and squid from the mesopelagic boundary community (Norris and Dohl 1980). The mesopelagic boundary community, comparable to a deep scattering layer, is a distinct, land-associated micronekton community that covers many kilometers over the slope of each island (Reid 1994). Many of the species found in the boundary community migrate diurnally, reaching depths of 400–700 m during the day and ranging from the surface to 400 m at night (Reid 1994). The boundary community also migrates horizontally, moving nearly 2 km toward shore until midnight, when it achieves its maximum density in waters approximately 1 km from the shoreline. After midnight, the community migrates away from shore as it descends (Benoit-Bird et al. 2001). Rather than foraging offshore for the entire night, we hypothesize that spinner dolphins track the horizontal migration of their prey, maximizing their foraging time and allowing them to forage on the layer at its highest densities.
We hypothesized that spinner dolphin foraging behavior would be affected by the temporal and spatial dynamics of their prey at both large and small scales. We also hypothesized that observations of predator-prey overlap could be affected by the method chosen to measure abundance of predators and prey. While little is known about the foraging behavior of spinner dolphins, they are a good model pelagic predator for of a combination of reasons. (1) Their prey is dynamic, both spatially and temporally, at small (meters and minutes) and large (kilometers and days) scales (Fig. 1), permitting questions about the effects of pattern and scale on foraging to be addressed. (2) A technique for surveying the abundance and density of the prey rapidly and with high spatial resolution exists (Benoit-Bird and Au 2001; Benoit-Bird et al. 2001). (3) Spinner dolphins and their prey are found close to shore making them an easily accessible pelagic system. (4) Resource acquisition is the primary focus of spinner dolphins at night because spinner dolphins feed on small, individual prey, but have high energetic needs (Norris et al. 1994) and very limited time to forage due to their physiology and the behavior of their prey. This reduces the complexities involved in separating foraging behavior from other activities. (5) It is unlikely that spinner dolphins and their prey could overlap simply based on shared responses to environmental cues because spinner dolphins, approximately 2 m in length, and boundary community animals, less than 10 cm in length, face very different pressures and are not likely to be similarly affected by environmental factors.

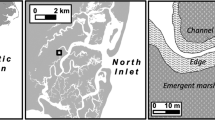
Spatial scales over which the boundary community around the Hawaiian Islands occurs [summarized from Benoit-Bird et al. (2001); Benoit-Bird and Au unpublished data]. Temporal scale generally increases with increasing spatial scale; smaller aggregations form and dissipate more quickly than larger aggregations. Grayscale is proportional to the density of prey at each scale so at smaller scales, prey is found in more dense aggregations
Methods
Active-acoustic surveys were used to determine: (1) the minimum and maximum depth of the prey layer, (2) the relative abundance of prey and of spinner dolphins, (3) the depths at which the density of prey was near its maximum, (4) the depth of spinner dolphins, and (5) the geometric and density characteristics of prey patches.
Sampling locations
A total of 620 km were surveyed off the leeward coasts of three Hawaiian islands, Hawaii, Oahu, and Lanai, at sites approximately 1.0–1.3 km from the shoreline ("inshore" sites), and 2.8–3.0 km from the shoreline ("offshore" sites). Each 5–10 km long transect was sampled at 90 min intervals between 1800 and 0400 hours. Each of eleven transects was surveyed at seven sampling times. Each combination of time and transect was replicated at least twice off Oahu, and during two separate cruises (November 1999 and June 2001) off Hawaii (Table 1). All sampling locations included sites known for their daytime abundance of spinner dolphins, including Kealakekua Bay off Hawaii, Manele Bay off Lanai, and Electric Beach off Oahu.
Acoustic data
Quantitative acoustic data from both the mesopelagic boundary community, and spinner dolphins were collected using a Computrol, Tournament Master Fishfinder NCC 5300, modified to read directly into a laptop computer (Benoit-Bird et al. 2001). The echosounder uses a 200-kHz [well above the hearing range of dolphins (Johnson 1967)], 130-μs long pulse and has a 156-m vertical range. The envelope of the echo was digitized at a sampling rate of 5 or 10 kHz using a Rapid System R1200 or a Computer Board PC DAS16/12-AO. Data acquisition was triggered by the outgoing signal. The transducer's signal was a downward pointing, 10° cone (Benoit-Bird et al. 2001). The transducer was towed beside the vessel at 2.6 m/s (5 knots) over the bottom, approximately 0.3 m below the surface of the water.
Density of mesopelagic animals was calculated with an echo energy integration technique (MacLennan and Simmonds 1992), as in Benoit-Bird et al. (2001). Target strengths of large, individual animals were calculated using an indirect calibration procedure incorporating reference targets (Benoit-Bird and Au 2001; Benoit-Bird et al. 2001). By observing spinner dolphins swimming beneath the transducer, we determined that spinner dolphins have a combination of unique scattering characteristics that makes it possible to separate them from other animals. The overall target strength of the dolphins was consistent as a function of depth, within 2 dB of -27 dB (regression relationship: dolphin target strength = -27 − 0.0005 × depth, r 2=0.0016, n=2,884), much less than a fish of equivalent length (Love 1970). Stronger echoes, presumably from the lungs of the animal (Au 1996), were found near one end of the animal. The number of echoes obtained from dolphins was also consistent, both in the horizontal and vertical directions.
Active-acoustic dolphin identification was confirmed using a combination of passive acoustics, listening to animal phonations, and visual sightings. A hydrophone was deployed at the beginning and end of transects and during slow moving transects. An experienced listener compared the recorded echolocation signals and whistles with recordings taken in Hawaii from animals visually identified as S. longirostris. During transects, an observer on the deck of the ship and one on the bridge noted the presence of dolphins and identified the species. Spinner dolphins were observed visually approximately 32% of the time that dolphins were detected acoustically. Beaufort Sea States greater than 1, moonless nights, and the short and nearly synchronized surfacing of the animals probably contributed to the limited visual observations. The night-time behavior of spotted dolphins, observed on two occasions, made them easy to observe for relatively long periods of time, unlike spinner dolphins. This behavior limited the chance of misidentifying this other most abundant dolphin species in Hawaiian waters, as spinner dolphins. During visual sightings of spotted dolphins, no dolphins were detected with the sonar.
Data analysis
We mapped the position, depth, and signal strength data from the echosounder in ArcView's Geographic Information System with 3-D Analyst in order to determine the horizontal and vertical distribution of mesopelagic animals and spinner dolphins. To calculate the mean depth of spinner dolphins, the number of dolphins was corrected for search area differences as a function of depth (caused by the conical shape of the transducer's beam) by dividing the number of animals located at a particular depth by the diameter of the beam at that depth. Diameter, not area of the beam, was used because the second dimension of the beam is covered by the direction of the transect. The relative abundance (analogous to catch-per-unit-effort) of spinner dolphins was defined as the percent of sampling time that dolphins were observed. We considered individual dolphins detected acoustically within 15 seconds of each other (about 40 m along a transect) to be part of the same group and calculated the observation time as the total time from the first sighting in the group until the last. Sightings of a single animal were assigned an observation time of 5 seconds. Because abundance is not based on counting of animals but rather percentage of sampling time dolphins were observed, multiple returns from the same animal within a short time of each other would have little effect on the calculated relative abundance. The relative abundance of mesopelagic organisms was defined as the percentage of the outgoing signals that returned with organisms present (MacLennan and Simmonds 1992; Benoit-Bird et al. 2001).
The Webster method (Webster 1973), a technique used to find significant differences in a variable over space, was used to determine the edges of patches and gaps in the mesopelagic boundary community. Using a 2 m + 2 m window, a t-statistic was calculated by subtracting the mean density in one window from the mean density in the other and dividing by the standard deviation of the prey density of the entire transect (Legendre and Legendre 1998). Locations of significant change in density (α=0.05), either along shore or with depth, determined by a series of one-tailed t-statistics with progressive Bonferroni corrections (Legendre and Legendre 1998), were defined as boundaries. This method resulted in sharp boundaries; allowing patches to be easily identified using the centroid method (Legendre and Legendre 1998). The density boundary determined by this technique defined the patches when the background density of prey was zero, and the boundaries of gaps when the background density was not zero within the prey layer's depth range. Due to the large differences in prey density between the background and bounded regions, this technique was robust in identifying patches and gaps regardless of window size (0.5–5 m) or P-value selected (0.005–0.15).
The effects of the dolphin presence, time of day, distance from the shoreline, cruise, and island on the density (mean, maximum, and variance) and geometric characteristics (horizontal extent, vertical extent, and distance to nearest neighboring patch) of patches, averaged over a transect, were investigated using Pillai's trace statistics from a multivariate analysis of variance (MANOVA). A discriminant function analysis of the same characteristics was also used to examine the differences between patches with and without dolphins. An analysis of variance (ANOVA) was used to investigate the effects of the presence of dolphins on individual patch characteristics. In areas where the boundary community formed an extensive layer, with pairs of small, vertical discontinuities or gaps, the characteristics of the area between the gaps (dolphins present) were compared to the average of the characteristics of the 25 m (approximately the mean of the intergap distance) on either side of the gap area (dolphins absent) using split-plot ANOVAs. We also used a multi-factor ANOVA to assess differences in the horizontal extent of patches and intergap areas containing dolphins. For all analyses, examination of the residuals indicated that transformations of the data were not necessary to satisfy the assumptions of ANOVA.
Results
Relative abundance
The relative abundance of spinner dolphins and their prey showed similar patterns for all three islands surveyed (Fig. 2). At inshore sites, there was an increase in the relative abundance of both dolphins and their prey from 1800 hours to midnight and then a decrease after midnight. The offshore sites showed a decrease in relative abundance of both dolphins and prey from 2100 hours to midnight and then an increase from midnight to 0300 hours. These results indicate that spinner dolphins were tracking their prey at large scales and at least some animals are following the diel horizontal migration of their prey, counter to the existing view that spinner dolphins forage offshore all night (Norris et al. 1994).

Relative abundance of spinner dolphins and boundary community animals at inshore sampling sites (a), and offshore sampling sites (b) for all islands combined. The solid lines represent relative abundance of the boundary layer, the percent of outgoing signals that return echoes from the boundary community. Error bars represent standard deviation. The open bars represent relative abundance of spinner dolphins, the percent of sampling time that dolphins were observed with the echosounder
Depth distribution
Off all three islands, the depth of the upper limit of the boundary layer and the depth of maximum prey density decreased from 2100 to 0000 hours and increased from 0000 to 0300 hours, indicating the layer's vertical migration (Fig. 3). At the offshore sites, two distinct layers in the prey were present at midnight, both with high prey density regions. Along with this vertical migration, the spinner dolphins' vertical range was narrower than the range of the prey layer except at the offshore sites at midnight, when two distinct layers of prey were present. The mean depth of spinner dolphins was always within 10 m of the depth of highest prey density, indicating that spinner dolphins were tracking their prey's density vertically. The mean depth of dolphins was always shallower than the minimum depth of the dense prey aggregations for all locations and times with the exception of the offshore sites at midnight. This is perhaps because of their limitations as air-breathing mammals and the transit-time to depth associated with these limitations.

Depth distribution of the boundary community (filled bars) and spinner dolphins (open bars) for inshore transects (a) and offshore transects (b) for all three islands combined. Error bars for the boundary community's distribution represent standard deviation. All observed spinner dolphins are represented in the dolphin distribution. Hatched bars within the distribution of the boundary community's distribution represent the depth at which the density of the boundary community was within 10% of its maximum. Circles within the dolphin's distribution represent the mean depth for all dolphins observed, corrected for differences in effort due to the transducer's beam width
Small-scale coherence
The distribution of prey was different off islands with different prey densities (Fig. 4). Off Hawaii and the southern portions of the Oahu transects, where overall prey density was low (mean density within the layer 15 animals m-3, maximum density 700 animals m-3), the boundary community was distributed in small (meters to tens of meters), discrete patches. Off Lanai and the northern portions of the Oahu transects, where overall prey density was high (mean density within the layer 23 animals m-3, maximum 1500 animals m-3), the boundary community was found in an extensive layer (kilometers) with small discontinuities or gaps. These narrow gaps in prey, 0.5–1.5 m horizontally, were found in pairs, separated by about 25 m. On average, 1.62 gap pairs in the boundary community were detected per kilometer surveyed. Dolphins were detected acoustically in all of the 141 gap areas observed off Lanai and north Oahu. Only 3 dolphin acoustic detections were made in areas outside gap areas off Lanai and north Oahu. In the lower density areas of Hawaii and south Oahu, an average of 5.1 patches of boundary community animals were detected for each kilometer surveyed, for a total of 2124 patches. Prey patches contained dolphins approximately 35% of the time.

The distribution of prey off the various islands varied as a function of the overall prey density as shown in these data taken at inshore near midnight. Areas of significantly different prey density are shown in grayscale with black indicating a prey density of zero and white indicating a density of 50 prey animals m-3. Off Hawaii and the southern portions of the Oahu transects (a), where overall prey density was low, the boundary community was distributed in small (meters to tens of meters), discrete patches. Off Lanai and the northern portions of the Oahu transects (b), where overall prey density was high, the boundary community was found in an extensive layer with horizontally small discontinuities or gaps. These gaps were found in pairs approximately 25 m apart and always contained dolphins
The effects of the sampling variables dolphin presence, time of day, distance from shore, cruise, and island on the characteristics of prey patches off Hawaii and south Oahu were investigated using a MANOVA (Table 2). The results show that only cruise had no significant effect on prey patch characteristics (MANOVA df=6, P=0.48). Given time and distance of the transect from the shoreline, the discriminant function analysis correctly categorized all dolphin-present patches. Classification error for dolphin-absent patches, given time and distance from shore, was 4.8%. If time and distance from shore are not considered, dolphin-present patches were misclassified 2.3% of the time, while dolphin-absent patches were misclassified 31.4% of the time.
To specifically investigate the relationship between dolphin presence and individual prey patch characteristics, prey patches in which dolphins were observed were compared with prey patches without dolphins by averaging individual characteristics within a transect and analyzing the transect averages of prey patches with and without dolphins using an ANOVA. The presence of dolphins was significantly associated with an increase in mean prey density (26% higher than dolphin-absent patches; ANOVA df=1, P<0.0001), maximum prey density (45% higher than dolphin-absent patches; ANOVA df=1, P<0.0001), and variance in prey density (309% higher than dolphin-absent patches; ANOVA df=1, P<0.0001). The presence of dolphins was related to a significant decrease in the horizontal extent of prey patches (46 m smaller than dolphin-absent patches; ANOVA df=1, P<0.0001) and distance between prey patches (18 m nearer to neighboring patches than dolphin-absent patches; ANOVA df=1, P<0.0001), even while ignoring the other factors that significantly impact these characteristics. There were no significant differences in the vertical extent of patches of prey with and without dolphins (ANOVA df=1, P=0.74, observed power=0.91).
Off Lanai and north Oahu, where the prey was found in extensive layers with dolphins inside gap areas, the characteristics of each prey intergap area and the average of the 25 m on either side of each intergap were compared using split-plot ANOVAs (Table 3). The prey density characteristics mean density, maximum density, and variance in density varied significantly as a function of time, distance from the shoreline, island, and dolphin presence. Dolphin presence was significantly associated with an increase in mean prey density (54% higher than dolphin-absent areas; split-plot ANOVA df=1, P<0.0001), maximum prey density (96% higher than dolphin-absent areas; split-plot ANOVA df=1, P<0.0001), and variance in prey density (335% higher than dolphin-absent areas; split-plot ANOVA df=1, P<0.0001). Vertical extent of the prey patches varied significantly with time (split-plot ANOVA df=2, P<0.0001) and distance from the shoreline (split-plot ANOVA df=1, P<0.0001) and their interaction (split-plot ANOVA df=24, P<0.0001), but not with island (split-plot ANOVA df=1, P=0.15) or dolphin presence (split-plot ANOVA df=1, P=0.86).
The horizontal size of prey patches and intergap areas in which dolphins were observed was analyzed for differences related to island, time, distance from the shoreline, and distribution type (intergap area or patch) (Table 4). No significant differences were found in the horizontal extent of prey areas in which dolphins were present as a function of any of these sources. The overall observed power was 0.87.
Dolphin foraging geometry
Spinner dolphins were almost always acoustically detected in pairs: of 1424 sightings of dolphins, 1331 were of a pair of dolphins, 63 were of triads, and 30 were of solitary animals. Paired dolphins were always acoustically observed in echelon formation with one dolphin above the other and offset horizontally nearly one body length. These pairs were evident in visual observations of surfacings as well. Pairs of animals were observed both visually and acoustically as part of larger, more dispersed groups. When groups of pairs were detected acoustically, they were in diagonal or V-shaped formations 90% of the time. Strongly coordinated, cooperative movements by a large number of animals were observed to be characteristic of spinner dolphins foraging on the boundary community in Hawaii. Fig. 5 shows an example of acoustic data from an intergap prey area in which 11 pairs of dolphins were detected in a V-shaped formation. It is important to note that this is a three-dimensional pattern compressed into two dimensions because of the methods used. The vertical orientation of the gaps provides strong circumstantial evidence that the prey is formed into a cylinder, with dolphins offset around a spiral. If the dolphins were swimming in a conical formation, the gaps would be diagonal as the dolphins swam through the prey. Because the acoustic surveys could only sample a narrow band along a straight line, and animals just to one side or the other of the beam would be missed, it is impossible to accurately estimate group sizes acoustically. Visual observations of group sizes are probably biased towards larger groups, because large groups would be easier to detect. However, groups of 5 pairs were the most common aggregation detected acoustically, and groups of as many as 26 animals were regularly recorded. The mean estimated group size of visually observed groups was 9 pairs.

An example of targets identified as spinner dolphins within an intergap area off Oahu (3 April 2001, 0014 hours, inshore). Prey density is proportional to the grayscale. Targets with a range of target strengths between −25 dB and −29 dB are shown in white. Eleven pairs of dolphins in a V-shaped formation are visible in this high prey density, intergap area that is approximately 25 m in horizontal extent. Spinner dolphins were most often observed in pairs and pairs were commonly observed as parts of larger groups, as shown in this data. These larger groups were acoustically detected in diagonal or helical formations in nearly 90% of the instances in which they were observed
Discussion
Spinner dolphins forage cooperatively, like many delphinids [see a review in Würsig (1986)] and other pelagic predators [for example Schmitt and Strand (1982); Anderson (1991); Serfass (1995)]. The consistent pairing of foraging dolphins, the structured patterns observed within groups of dolphins, and the response of the prey to the foraging predators indicate that foraging is truly cooperative, not just a group of animals aggregating at a common resource. Cooperative foraging by spinner dolphins (pairs and groups of pairs) occurred even with large differences in prey distribution, suggesting that it was either obligate or involved a social component. Cooperation was particularly evident when spinner dolphins were foraging in high prey density sites. Dolphins were surrounded by an extensive prey layer, yet dolphins foraged together, in pairs that were part of larger, structured groups. The circle of dolphins was surrounded by gaps on the edges of their distribution. No dolphins were observed away from the geometric structure of the group.
Spinner dolphins followed both the vertical and horizontal components of their prey's diel migrations. The vertical distribution of spinner dolphins in relation to the vertical distribution of the boundary community shows that off all three islands surveyed, spinner dolphins followed the vertical migration of the mesopelagic layer. They also selected depths within the layer that had the highest density, similar to behavior observed in foraging blue whales (Croll et al. 1998). Contrary to the existing belief (Norris et al. 1994), the patterns in the relative abundance of spinner dolphins in relation to their prey show that spinner dolphins are not spending the entire night offshore. Spinner dolphins were visually sighted and acoustically detected within 1 km of the shoreline with a relatively high frequency, particularly at midnight when the relative abundance of the boundary community in these inshore areas was highest, and the prey density reached its maximum (Benoit-Bird et al. 2001). Tracking data collected by Norris et al. (1994) off the leeward coast of Hawaii support the hypothesis that Hawaiian spinner dolphins follow the horizontal migration of their prey. Norris et al. (1994) tried to explain patterns in their night time tracking data as a function of bottom depth but could find no consistent pattern. A recent study of the boundary community has shown that distance from shore, rather than bottom depth, determines the abundance and density of the prey of spinner dolphins (Benoit-Bird et al. 2001). A reassessment of the tracking data of Norris et al. shows that every night, tagged animals came within 1 km of the shoreline near midnight and reached distances of up to 8 km from the shore near 2100 and 0300 hours, showing the inshore-offshore pattern we propose. The observed patterns shows that the spinner dolphin population off the coasts of all the Hawaiian Islands surveyed tracked the abundance of their prey within the temporal scales of hours to the entire night, and over spatial scales of tens of meters to several kilometers. This movement allows spinner dolphins to exploit their prey at its highest densities and maximizes their time to forage.
Micronektonic animals in the boundary community, like most animals of deep-scattering layers, presumably migrate into shallow water to obtain food during the night (Clarke 1978), when their exposure to visual predators (e.g. tunas, billfishes, and bottomfish) is reduced (Clarke 1970; Blaxter 1974; Enright 1977; Roe and Badcock 1984). Zooplankton undergo similar migrations (Pearre 1979; Ringelberg 1995), needing to obtain food while avoiding visual predators. The effects of these associated migrations, a balance of top-down and bottom-up forces, were observed in Hawaiian mesopelagic boundary animals as they overlap with high abundances of phytoplankton and primary production (Gilmartin and Revelante 1974; Benoit-Bird et al. 2001). It appears that the migration patterns of spinner dolphins are the result of an upward, trophically mediated cascade: phytoplankton are found near the islands; zooplankton migrate upward and toward shore to reach the phytoplankton while attempting to avoid becoming prey; micronekton migrate upward and toward shore to reach the zooplankton while avoiding their own visual predators. Finally, spinner dolphins stay inshore during the day to avoid their predators (Norris and Dohl 1980); at night they swim offshore and begin to follow the migration patterns of mesopelagic micronekton, reaching the near shore areas again at the vertex of the mesopelagic boundary community's migration pattern. This hypothesis has not yet been directly tested with synoptic data collection on many trophic levels.
Spinner dolphins were found within prey patches that had higher density and higher variance in density, were closer to neighboring patches, and were much smaller horizontally than prey patches that did not contain dolphins. Patches with all of these characteristics did not exist in the absence of dolphins. Intergap areas also had higher prey density and variance than the background. These gaps did not exist in the absence of dolphins. Both patches and intergap areas in prey were the same horizontal size, regardless of time of day or distance from the shoreline, factors that significantly affected horizontal size of prey in areas without dolphins. This was evidenced by the significant interaction effects observed in the MANOVA between dolphins and time, and dolphins and distance from the shoreline. The interaction effect between time and distance is discussed in Benoit-Bird et al. (2001). It is possible that spinner dolphins simply selected prey areas with these characteristics. However, if they only selected these areas, they selected all areas within the bounds of the survey that matched these characteristics. We hypothesize that spinner dolphins were altering the geometric and density characteristics of their prey while foraging. The small, consistent size of patches in which dolphins were found, their proximity to neighboring, potential source patches, and their high densities indicate that dolphins were creating these patches by breaking them away from existing patches and concentrating prey. The coordinated foraging of large numbers of animals that we observed provides a potential mechanism for the alteration of prey patches, similar to the behavior observed by Similä (1997) in killer whales. We hypothesize that dolphins are swimming at different depths on the outside edges of a prey area, concentrating the prey by tightening the circle around it, thus creating the strong, vertical edges observed in patches with dolphins and the vertical gaps associated with groups of dolphins. Such swimming behavior would produce the V-shaped dolphin group patterns observed with the echosounder. To test this hypothesis requires three-dimensional information on both predator and prey.
The mesopelagic boundary layer, the prey of spinner dolphins, is aggregated at hierarchically nested levels (Fig. 1). Spinner dolphins are capable of responding to overall and local changes in their prey's abundance. These response patterns were consistent over all three islands, even though the distribution of prey varies significantly between the islands. Spinner dolphins followed both the diel vertical and horizontal migrations of their prey, matching prey abundance at spatial scales of tens of meters and kilometers, and temporal scales of hours to the entire night. Within the vertical distribution of their prey, spinner dolphins were found most often near the highest prey densities, which were confined to a narrow depth range, showing that spinner dolphins matched the density patterns of their prey at the scales of tens of meters and hours. Spinner dolphins also matched the density of their prey at the scale of a patch, less than 25 m in size and changing over short temporal scales (e.g. minutes). This small-scale coherence may be different from that in other systems because of alteration of the prey field by the dolphins.
Whatever the mechanisms, the overlap between spinner dolphins and their prey at this range of scales is contrary to other studies of pelagic predator-prey interactions. The studies that did not find coherence between pelagic predators and prey had a notable methodological similarity. While they used a variety of specific techniques to study predators and prey, all of these studies used different methods for each trophic level. The methods were often described as "simultaneous" (Piontkovski and Williams 1995), but collection of predator and prey data using different methods makes it, at best, quasi-synoptic. Data from the two approaches do not have the same resolution or coverage, and the two data sets are not at the same temporal or spatial scale. This is crucial for highly mobile animals that can rapidly change their relative positions. Only the largest scale overlap between spinner dolphins and their prey would have been observed if we had used methods comparable to other studies, trawling for prey, done for a sister study (Benoit-Bird and Au 2001), and the surface observations used to identify dolphin species. Dolphins were observed to surface outside the prey areas in which they were foraging, which would make it appear that they were foraging on less preferable prey areas.
Small-scale overlap between other actively foraging pelagic predators and their prey has been found using synoptic data collection (Rose and Leggett 1990). This raises an important question about a conclusion drawn from studies using non-synoptic methods: that predators and prey in pelagic systems do not overlap at small scales because of some fundamental difference between pelagic systems and other habitats. The availability of synoptic data—data taken at the same temporal and spatial scales, with the same resolution and coverage—has the potential to fundamentally alter our conclusions about pelagic predator-prey interactions, as well as other interactions in three-dimensional habitats.
Acknowledgements
We would like to thank the National Marine Fisheries Service's Honolulu Laboratory for generously providing ship time aboard the Townsend Cromwell and the Sustainable Seas Expedition sponsored by the National Oceanic and Atmospheric Administration and National Geographic for providing ship time aboard the Ka'imimoana. We also thank Rusty Brainard for fostering our collaboration with the NMFS Laboratory, providing us the opportunity to be aboard the Cromwell and Chief Scientist Robert Humphreys for working with us to maximize the accomplishment of both his and our cruise objectives. The officers and crew of the Townsend Cromwell and Ka'imimoana provided excellent scientific support, especially Phil White. We would also like to thank Russell Brainard, Carmen Bazua, Chris Bird, Lisa Davis, Marc Lammers, and Scott Murakami for assistance with field work and Mark Latham of Computrol for providing invaluable assistance in modifying the echosounder. George Losey, Paul Nachtigall, James Parrish, Bernd Würsig, Carrie DeLong, and Chris Bird made helpful comments on earlier drafts of this manuscript. The Oceanwide Science Institute provided funding for vessel time off Oahu. The Leonida Family and the ARCS Foundation provided financial support to KJ Benoit-Bird through their scholarship funds. This paper is funded, in part, by a grant from the National Oceanic and Atmospheric Administration, project #R/FM-7, which is sponsored by the University of Hawaii Sea Grant College Program, SOEST, under Institutional Grant No. NA86RG0041 from NOAA Office of Sea Grant, Department of Commerce. The views expressed herein are those of the authors and do not necessarily reflect the views of NOAA or any of its subagencies. UNIHI-SEAGRANT-JC-02–11. This is HIMB contribution 1150. The research presented complies with current U.S. laws.
References
Anderson JGT (1991) Foraging behavior of the American white pelican (Pelecanus erythrorhyncos) in western Nevada. Colon Waterbirds 14:166–172
Au WWL (1996) Acoustic reflectivity of a dolphin. J Acoust Soc Am 99:3844–3848
Benoit-Bird KJ, Au WWL (2001) Target strength measurements of animals from the Hawaiian mesopelagic boundary community. J Acoust Soc Am 110:812–819
Benoit-Bird KJ, Au WWL, Brainard RE, Lammers MO (2001) Diel horizontal migration of the Hawaiian mesopelagic boundary community observed acoustically. Mar Ecol Prog Ser 217:1–14
Blaxter JHS (1974) The role of light in the vertical migration of fish—a review. In: Evans GC, Bainbridge R, Rackham O (eds) Light as an ecological factor: II The 16th symposium of the British Ecological Society. Blackwell, Oxford
Boyd II (1996) Temporal scales of foraging in a marine predator. Ecology 77:426–434
Clarke GW (1970) Light conditions in the sea in relation to the diurnal vertical migrations of animals. In: Farquar GB (ed) Proceedings of an international symposium on biological sound scattering in the ocean. Department of the Navy, Washington, pp 41–50
Clarke T (1978) Diel feeding patterns of 16 species of mesopelagic fishes from Hawaiian waters. Fish Bull 76:495–513
Croll DA, Tershy BR, Hewitt RP, Demer DA, Fiedler PC, Smith SE, Armstrong W, Popp JM, Kiekhefer T, Lopez VR et al (1998) An integrated approach to the foraging ecology of marine birds and mammals. Deep-Sea Res II 45:1353–1371
Enright JT (1977) Diurnal vertical migration: adaptive significance and timing. Limnol Oceanogr 22:856–886
Fauchald P, Erikstad KE, Skarsfjord H (2000) Scale dependent predator-prey interactions: the hierarchical spatial distribution of seabirds and prey. Ecology 81:773–783
Gilmartin M, Revelante N (1974) The 'island mass' effect on the phytoplankton and primary production of the Hawaiian Islands. J Exp Mar Biol Ecol 16:181–204
Goss C, Bone DG, Peck JM, Everson I, Murray GLJ, Huntand AWA (1997) Small-scale interactions between prions Pachyptila spp. and their zooplankton prey at an inshore site near Bird Island, South Georgia. Mar Ecol Prog Ser 154:41–51
Greco NM, Liljesthrom GG, Sanchez NE (1999) Spatial distribution and coincidence of Neoseiulus californicus and Tetranychus urticae (Acari: Phytoseiidae, Tetranychidae) on strawberry. Exp Appl Acarol 23:567–580
Greene CH, Wiebe PH, Zamon JE (1994) Acoustic visualization of patch dynamics in oceanic ecosystems. Oceanography 7:4–12
Ives AR, Kareiva P, Perry R (1993) Response of a predator to variation in prey density at three hierarchical scales: Lady beetles feeding on aphids. Ecology 74:1929–1938
Johnson CS (1967) Sound detection thresholds in marine mammals. In: Tavolga W (ed) Marine BioAcoustics. Pergamon Press, New York, pp 247–260
Legendre P, Legendre L (1998) Numerical Ecology, vol 20, 2nd English edn. Elsevier, New York
Logerwell EA, Hargreaves B (1996) The distribution of sea birds relative to their fish prey off Vancouver Island: opposing results as large and small spatial scales. Fish Oceanogr 5:163–175
Love RH (1970) Dorsal-aspect target strength of an individual fish. J Acoust Soc Am 49:816–823
MacLennan DN, Simmonds EJ (1992) Fisheries Acoustics. Chapman and Hall, New York
Mason DM, Brandt SB (1996) Effects of spatial scale and foraging efficiency on the predictions made by spatially-explicit models of fish growth rate potential. Environ Biol Fishes 45:283–298
Mehlum F, Hunt GLJ, Klusek Z, Decker MB (1999) Scale-dependent correlations between the abundance of Brunnich's guillemots and their prey. J Anim Ecol 68:60–72
Morgan RA, Brown JS, Thorson JM (1997) The effect of spatial scale on the functional response of fox squirrels. Ecol 78:1087–1097
Muotka T, Penttinen A (1994) Detecting small-scale spatial patterns in lotic predator-prey relationships: statistical methods and a case study. Can J Fish Aquat Sci 51:2210–2218
Norris KS, Dohl TP (1980) Behavior of the Hawaiian spinner dolphin, Stenella longirostris. Fish Bull 77:821–849
Norris KS, Würsig B, Wells RS, Würsig M (1994) The Hawaiian Spinner Dolphin. University of California Press, Berkeley
Pearre S (1979) Problems of detection and interpretation of vertical migration. J Plankton Res 1:29–44
Piontkovski SA, Williams R (1995) Multiscale variability of tropical ocean zooplankton biomass. ICES J Mar Sci 52:643–656
Reid SB (1994) Spatial structure of the mesopelagic fish community in the Hawaiian boundary region. PhD Dissertation Department of Oceanography, University of Hawaii, Honolulu
Ringelberg J (1995) Changes in light intensity and diel vertical migration: a comparison of marine and freshwater environments. J Mar Biol Assoc UK 75:15–25
Roe HSJ, Badcock J (1984) The diel migrations and distributions within a mesopelagic community in the north east Atlantic. 5. Vertical migrations and feeding of fish. Prog Oceanogr 13:389–424
Rose GA, Leggett WC (1990) The importance of scale to predator-prey spatial correlations: an example of Atlantic fishes. Ecology 71:33–43
Russell RW, Hunt GL, Coyle KO, Cooney RT (1992) Foraging in a fractal environment: spatial patterns in a marine predator-prey system. Landscape Ecol 7:195–209
Schmitt RJ, Strand SW (1982) Cooperative foraging by yellowtail, Seriola lalandei (Carangidae), on two species of fish prey. Copeia 3:714–717
Serfass TL (1995) Cooperative foraging by North American river otters, Lutra canadensis. Can Field Nat, pp 458–459
Similä T (1997) Sonar observations of killer whales (Orcinus orca) feeding on herring schools. Aquat Mamm 23:119–126
Steele JH (1978) Spatial pattern in plankton communities. Plenum Press, New York
Stewart BD, Jones GP (2001) Associations between the abundance of piscivorous fishes and their prey on coral reefs: Implications for prey-fish mortality. Mar Biol 138:383–397
Tiselius P, Jonsson PR, Verity PG (1993) A model evaluation of the impact of food patchiness on foraging strategy and predation risk in zooplankton. Bull Mar Sci 53:247–264
Webster R (1973) Automatic soil-boundary location from transect data. Math Geol 5:27–37
Würsig B (1986) Delphinid foraging strategies. In: Schusterman RJ (ed) Dolphin cognition and behavior: a comparative approach. Lawrence Erlbaum, Hillsdale, New Jersey, pp 347–359
Zhang ZQ, Sanderson JP (1993) Spatial scale of aggregation in three acarine predator species with different degrees of polyphagy. Oecologia 96:24–31
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by F. Trillmich
Rights and permissions
About this article
Cite this article
Benoit-Bird, K.J., Au, W.W.L. Prey dynamics affect foraging by a pelagic predator (Stenella longirostris) over a range of spatial and temporal scales. Behav Ecol Sociobiol 53, 364–373 (2003). https://doi.org/10.1007/s00265-003-0585-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00265-003-0585-4