
Abstract
Whether visible or not, knowing the location of our hands is fundamental to how we perceive ourselves and interact with our environment. The present study investigated perceived hand location in the absence of vision in 30 participants. Their right index finger was placed 10, 20 or 30 cm away on either side of the body midline, with and without their left index finger placed 10 cm to the left of the right index. On average, at each position, participants perceived their right hand closer to the body midline than it actually was. This underestimation increased linearly with increased distance of the hand from body midline [slope 0.77 (0.74 to 0.81), mean (95% CI)]. Participants made smaller errors in perceived hand location when the right hand was in the contralateral workspace [mean difference 2.13 cm (1.57 to 2.69)]. Presence of the left hand on the support surface had little or no effect on perceived location of the right hand [mean difference \(-0.54\) cm (\(-1.10\) to 0.02)]. Overall, participants made systematic perceptual errors immediately after hand placement. The magnitude of these errors grew linearly as the hand got further away from the body midline. Because of their magnitude, these errors may contribute to errors in motor planning when visual feedback is not available. Also, these errors are important for studies in which perceived hand location is assessed after some time, for example, when studying illusions of body ownership and proprioceptive drift.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
We must accurately perceive the location of our hands to plan and perform goal-directed movements and to locate touch in the external world. When visual feedback is reduced or absent, for example in a dimly lit room, we have a greater, and at times total reliance on proprioceptive signals to determine the configuration of our upper limbs (Proske and Gandevia 2012). We are good at sensing differences in upper limb configurations in the absence of vision. For example, we can accurately discriminate between two passively achieved arm configurations where the position of the index finger differs by only \(\sim\)1.2 cm in the 2D horizontal workspace (Wilson et al. 2010). The story is different when locating our limbs in space. To accomplish this task, the brain must integrate the current configuration of our upper limb into its internal model of the body, and map this representation to its representation of the external world (Kawato and Wolpert 1998; Desmurget et al. 2000; van Beers et al. 1996, 1999, 2002; Haggard et al. 2000; Kuling et al. 2018). Unfortunately, this mapping is not perfect and we tend to make errors when reporting the perceived location of a hidden hand (Wann and Ibrahim 1992; Desmurget et al. 2000; Rincon-Gonzalez et al. 2011; Kuehn et al. 2015; Kuling et al. 2016), especially when it is passively moved to this location (Paillard and Brouchon 1968).
Perceived hand location has been used to quantify the proprioceptive drift that accompanies illusions of body ownership (e.g. Botvinick and Cohen 1998; Ehrsson et al. 2005). Some of these studies include a control condition in which participants must report the perceived location of their hidden hand when it is located 30 cm from the body midline. In one such study involving 90 participants, the control condition revealed that, on average and compared to its actual position, the hand was perceived 3.15 cm closer to the midline (Samad et al. 2015). Participant errors were normally distributed about this point and ranged from 12 cm closer to midline all the way to 6 cm further from midline. While these errors varied considerably between participants, they tended to be consistent within participants; that is, the erroneous mapping was stable for a given individual. These results—high between-individual variability and low within-individual variability—have been reproduced by Fuchs et al. (2016) in a group of 30 participants. They are also in line with a series of recent studies looking at errors in perceived hand location in the 2D horizontal workspace (Rincon-Gonzalez et al. 2011; Kuehn et al. 2015; Kuling et al. 2016, 2018), the only difference being that these studies conclude between-individual errors are idiosyncratic; that is, without an overall pattern.
We recently reported on a body ownership illusion where, in the absence of visual feedback and with hands spaced vertically 12 cm apart, participants grasping an artificial finger reported a sense of ownership over the finger and a coming-together of their hands (Héroux et al. 2018). Because the rubber hand illusion—the classic illusion of body ownership (Botvinick and Cohen 1998)—has almost exclusively been investigated in the horizontal plane with the hands side-by-side, we recently investigated our grasp illusion in the horizontal plane (Qureshi et al. 2018). In this study, we specifically wanted to determine whether grasping an artificial finger would reduce the perceived spacing between the hands of participants, and if so, whether this coming-together of the hands was due to one hand moving towards the other or whether both hands moved towards one another. Based on our pre-planned analysis, we analysed measures of perceived hand location when grasping the artificial finger was associated with a significant coming-together of the hands; this only occurred when the hands were crossed and spaced 15 cm apart. Nevertheless, out of curiosity, we visually inspected all of the data and noted that for the no-grasp condition, when participants simply sat with their hands spaced 15 cm or 24 cm either crossed or uncrossed for 3 min, perceived hand location appeared to be biased towards the body midline, where the other hand was located. These data and the relevant experimental details are presented in Fig. 1. In line with previous reports, there was considerable between-individual variability and, based on pilot testing, we knew there was little within-individual variability in these measures. Pilot testing also revealed that the midline bias in perceived hand location was present immediately after the hands were positioned. Notwithstanding the pattern present in these data, they were collected to address questions related to illusions of body ownership, not hand (mis)localization.
Thus, the present study was devised to determine whether humans mis-localize their hands closer to the body midline when hidden from view. Specifically, the aim was to determine the size and direction of errors in perceived location of the right index finger when the right hand was placed at various locations across the horizontal workspace with and without the left hand present in the workspace. When present, the left hand was at a fixed distance of 10 cm to the left of the right hand. This allowed us to determine whether the pattern observed in the secondary analysis of data from Qureshi et al. (2018) was due to a midline bias in perceived hand position, or a bias toward the other hand, which was always at midline. We hypothesised the index finger would be consistently perceived closer to midline, with errors increasing in size as distance from midline increased. Because we tend to use our right hand on the right side of the workspace, we hypothesised that errors in perceived index finger position would be less when the right index finger was located on the right side of the workspace. We also hypothesised that presence of the left hand in the workspace would not affect perceived location of the right index finger.
Methods
Thirty right-handed healthy adults participated in the study (11 males, mean age 29.1 years, range 19 to 58). We have previously used this sample size to study body ownership illusions in both the vertical and horizontal workspace (Héroux et al. 2018; Qureshi et al. 2018) and obtained precise estimates of perceived index finger location (0.8 to 1.25 cm margin of error, which represents one-half of the 95% CI). Participants were informed of the experimental procedure prior to testing, but remained naive to the study hypotheses. The study was conducted in accordance with the Declaration of Helsinki (2008) and approved by the University of New South Wales Human Research Ethics Advisory Panel. All participants provided written informed consent prior to participating.

Unpublished data of perceived index finger location. Participants sat with both their upper limbs resting on a table positioned at chest height. The right index was located at the body midline and the left index finger was located at 15 cm or 24 cm on either side of the horizontal workspace. After 3 min of watching a silent film and having their hands relaxed, participants reported the perceived position of their left index finger. The experimental set-up and rulers to report perceived index finger position were similar to those used in the present experiment. The black horizontal lines correspond to the actual location of the left index finger (i.e. 15 cm and 24 cm). Grey circles correspond to individual participant responses (n = 29). Black circles and error bars correspond to the mean [95% CI]. On average, participants underestimated the location of their index finger, closer to the body midline, with greater mean errors when the index finger was further away from midline
Experimental set-up
The experiment was conducted with the participants seated at a table inside an enclosed booth. A monitor (height: 60 cm, width: 105 cm) was located 70 cm in front of the participants, with the base of the screen at approximately shoulder height. A cloth extending from the table ensured participants could not see their hands or arms throughout the experiment. Once seated in the booth and the cloth in place, participants watched a short video which explained the experimental measure and protocol. Next, the experimenter reviewed these instructions and answered any questions participants may have had. The experiment was conducted using custom software written in the Python programming language (Python Software Foundation, version 2.7).
Experimental measure
To measure perceived hand location, one of a set of experimental rulers was placed in front of the participants, 15 cm directly above their hand (approximately shoulder height). Each ruler consisted of 86 short vertical lines at 1 cm intervals. The lines were assigned a number in a sequence, randomly starting between 100 and 900; every third line marked with its corresponding 3-digit number (Fig. 2c). Participants could choose any line, not only those marked with a number. The experimenter then read out the following question as it appeared on the monitor,“Which line corresponds to the horizontal location of the tip of your right index finger?”. Once participants selected a number, the experimenter repeated it aloud to confirm the response.
Vision has good spatial acuity to locate and report the position of the hand and digits in space, especially along the medio-lateral plane (van Beers et al. 1996, 1999). Even at the most extreme location used in our study, the variability of visually selected points will be a few millimetres at most (Samad et al. 2015). Moreover, pilot testing on five healthy participants prior to the start of the study indicated that, with visual feedback of the hands, participants correctly select the line on the ruler that corresponded to the horizontal location of their right index finger ± 1 cm. Thus, when this information is combined with the fact that each value included in our final analysis was the average of three trials (see below), we are confident that the line on the ruler selected by participants during the experiment corresponded to the location where they felt the tip of their right index finger.
Experimental protocol
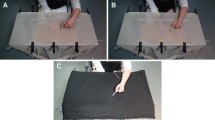
The experiment consisted of two conditions, one hand and two hands (Fig. 2a). In the one hand condition, participants’ right index finger was placed in one of six different positions, 10, 20 or 30 cm away on either side of body midline (Fig. 2b); their left hand rested by their side. In the two hands condition, the right hand was placed in the same position as before and the left hand was placed to the left of the right hand, with 10 cm between the tips of the right and left index fingers. When a hand was part of the experimental condition, it was positioned \(\sim\)25 cm anterior and \(\sim\)10 cm below shoulder height. Both conditions were tested on the same day, with the order randomised across participants. Three trials were conducted for each hand position, with the order of the 18 trials (i.e. 6 positions \(\times\) 3 trials) randomised across participants.
Participants sat with their hands by their side at the start of each trial. The experimenter prompted participants to bring their right hand up above the table in a semi-pronated posture with the index finger extended and pointing towards the contralateral side. From this position, the experimenter supported the arm and hand and guided them randomly through the horizontal workspace for 2-3 s prior to placing them on the table such that the tip of the right index finger was at the test location (see Fig. 2b). Participants were instructed to be completely relaxed while their arm and hand were guided to the test location; the experimenter was careful to avoid touching any part of the index finger. In the two hands condition, the experimenter then guided the participants’ left hand onto the same surface (see Fig. 2a). With the arm and hand resting on the support surface, the wrist in neutral flexion-extension and the anterior-posterior location of the hand standardised, each test location resulted in only one possible combination of shoulder and elbow angles for each test location for each participant. Arm length differences caused small differences in shoulder and elbow angles between participants. Participants were instructed to keep their hands and arms relaxed throughout the trial. Next, the experimenter presented the ruler and prompted participants to report the perceived location of their index fingers. After the response was recorded, participants were instructed to place their hands by their side in preparation for the next trial. There was an interval of 30 s between the end of one trial and the start of the next.
Data analysis
Prior to formally analysing the data, the authors independently inspected blinded scatter plots of the raw data. Five data points from four participants were identified as clear outliers: they were uncharacteristically different from the other responses from that participant at a given position (>10 cm). These errors may have been due to participants misreading the numbers on the ruler or the experimenter entering the data incorrectly. All five data points were removed. Importantly, the two data points from the same participant did not come from the same experimental condition.

Set up. Participants could not see their arms or hands throughout the experiment. a Participants were tested in two conditions (one hand or two hands). In the two hands condition, the tip of the left index finger was placed 10 cm away from the tip of the right index finger. b The tip of the right index finger was placed 10, 20 or 30 cm away from body midline on either side (left or right). Three trials were conducted at each hand position. c Using a ruler placed above the hands, participants reported the perceived hand location by selecting the line which they felt corresponded to the tip of their right index finger
Responses were averaged for each experimental condition and the data were analysed using a linear mixed model. The dependent variable was perceived index finger location. The fixed effects were distance (10, 20 or 30 cm), side (left or right) and hands (one or two). Participants were a random factor. Interaction terms were initially included in the model, but none of these were associated with scientifically or statistically significant effects (all P > 0.1). Thus, the model was re-run without interaction terms to obtain directly interpretable model coefficients. Statistical significance was set at \(\alpha =\) 0.001 to reduce the chance of false-positive results and increase the probability our results could be reproduced at the \(\alpha = 0.05\) level (Curran-Everett 2017). All statistical analyses were performed using Python (statsmodels, Seabold and Perktold 2010).
Results
In the absence of visual feedback, participants made systematic errors in the perceived location of their right index finger, with both distance and side having an effect on the perceived location of the right index finger (Fig. 3). Specifically, perceived index finger location increased by 0.77 cm [0.74 to 0.81] for each centimetre away from body midline. In other words, the further a hand was from midline the more its position was underestimated. Also, the right index finger was perceived 2.13 cm [1.57 to 2.69] closer to the body midline when it was on the right side of the workspace compared to when it was on the left side. Finally, presence of the left hand had little or no effect on perceived location of the right index finger [\(-0.54\) cm (\(-1.10\) to 0.02)].

Perceived location of the right hand across the 6 horizontal hand positions, in one hand and two hands conditions. At each of the hand positions, participants on average perceived their right hand to be located closer to body midline. The error in perceived hand location was greater as the distance of the hand from body midline increased. All but five data points represent the average of three values obtained from a measure with small, trial-to-trial error (±1 cm); thus, measurement error was \(\le\)1 cm. The circles depict mean perceived location, error bars are 95% CI
Discussion
The present study shows that when the right hand is out of view, it is perceived closer to the body midline than it actually is, and this occurs across the horizontal workspace. This underestimation increases linearly the further the hand is from midline and is somewhat worse when the right hand is located on the right side of the workspace. The size of these systematic perceptual errors is not negligible. For example, a right hand located 30 cm to the right of midline, just beyond the shoulder, is perceived to be only 23 cm away. The pattern of errors, combined with their immediacy, indicates the horizontal perceptual workspace for the hands may be intrinsically contracted.
The right hand was reported closer to midline than it actually was. This is in line with the anecdotal observations made from measures of perceived index finger location from our previous study (Fig. 1), as well as results from the control trials of studies investigating illusions of body ownership (Samad et al. 2015; Fuchs et al. 2016). But how do our findings compare to other types of studies? Kuehn et al. (2015) studied 12 subjects and found that when the right arm is passively moved to the test location and the tip of the right index finger is located 2 or 4 cm on either side of midline, it is perceived \(\sim\)3 cm to the right of its actual location. However, the precision of these estimates was poor, and, if reported, the 95% CI would have included 0 cm. In another small study, Rincon-Gonzalez et al. (2011) tested 7 participants and reported that the pattern of perceptual errors across a large portion of the horizontal 2D workspace was idiosyncratic. This finding was confirmed in two small studies by Kuling et al. (2016, 2017), who also found that the pattern of errors differs when participants are asked to move a hidden hand to a visual target or to their other hidden hand, and that errors in perceived location are almost double when participants are asked to move a visual target to a hidden hand; that is, in a task that does not require active pointing.
It is possible that different reporting methods require different central transformations, proprioceptive-visual versus proprioceptive-motor, and that this results in different patterns of perceptual errors. It is also possible that perceptual errors have no overall pattern between individuals; that is, they are idiosyncratic. However, these findings may reflect, at least in part, the small sample sizes of these studies. This may not be a popular proposal, but it may explain why small sample studies tend to report idiosyncratic error patterns and large sample studies tend to report an overall pattern of midline bias. A small random sample from a variable, normally distributed process will, more often than not, appear to be idiosyncratic. Moreover, when data are variable and the investigated effect is not large, small sample studies are at risk of false-negative results (as well as false-positive results; Cumming and Calin-Jageman 2016). Thus, if our study or those of Samad et al. (2015) and Fuchs et al. (2016) only included 7 participants, it is possible that no systematic bias towards midline would be observed, with the scatter of data interpreted as idiosyncratic.
Having said this, why would people perceive their hand to be closer to midline? Why would the magnitude of this underestimation increase with distance from midline? This pattern of errors cannot be explained by the tendency to perceive fingers and hands shorter than they actually are (Longo et al. 2010), as this would result in errors away from midline when the hand was right of midline. Also, this pattern of errors cannot be explained by noisy or biased proprioceptive signals as humans can distinguish between two slightly different positions anywhere in the horizontal workspace, with systematic errors in the order of a few millimetres (Wilson et al. 2010). Finally, this pattern of errors cannot be explained by the hands being (perceptually) attracted to one another as the presence of the left hand in the workspace had no effect on perceived index finger location.
A possible explanation for the midline-biased pattern of errors involves the brain’s various internal models (Kawato and Wolpert 1998; Medina and Coslett 2010). The internal model of the body will be updated by incoming proprioceptive signals generated when the hand is passively guided to the test position. Because participants were asked to report where, in the physical world, they perceived their hand to be, the brain has to map its internal model of the body to its internal representation of the external world. Thus, perceptual errors observed in the present study could be due to systematic errors in how the internal model of the body is updated, and how it is mapped to the brain’s representation of the external world. Clearly, this explanation is speculative, and more work is needed to identify the cause of the perceptual contraction of the workspace. Of possible relevance is the work of Romano et al. (2017) showing that the brain may possess a model of the default spatial configuration of the body that guides perception, with this default model more heavily weighted when visual cues are unavailable. Thus, the increase in perceptual errors with distance from the midline may relate to the increased discrepancy between the body’s actual configuration and the brain’s default model. However, such a process cannot explain why participants were somewhat more accurate when the right hand was on the left side of the workspace, which suggests other yet-to-be discovered processes may be involved.
In the present study we found little or no difference between the one hand and two hand conditions. We specifically chose to have the tip of the left index finger always 10 cm away from the right because this represents a common hand configuration, for example when typing on a keyboard, eating with a knife and fork, or reading a book. Moreover, it allowed us to determine whether our previous anecdotal results were due to the hand being mislocalized towards the body midline or being attracted towards the other hand, or a combination of both. We can now conclude that our previous results reflect a midline bias rather than a perceptual attraction between the hands.
It is interesting that the magnitude and direction of the errors in perceived hand location obtained in the present study are largely comparable to those from our previous study where measures were taken after 3 min (Fig. 1). Although a direct comparison is not possible, it appears that errors in perceived hand location are relatively stable over time. In contrast, several studies have reported the presence of limb position or proprioceptive drift (e.g. Paillard and Brouchon 1968; Wann and Ibrahim 1992; Brown et al. 2003; Tsay et al. 2014; Smeets et al. 2016). In these studies, the perceived position of a hidden hand or the end-point error of a hidden hand movement drifts, either in time or based on the number of movements performed. Importantly, these studies all include an active component: active pointing or matching, repeated movements, or cyclical movements. In future, it would be interesting to confirm whether passive measures of perceived hand location do not drift over time.
Conclusion
In our everyday lives, we constantly rely on our ability to accurately perceive the location of our hands. The present study shows that we make immediate and systematic errors in perceived hand location when vision is not available, with the body midline playing an important role. Our simple approach has provided precise estimates of these perceptual errors. However, key questions remain to be answered. For example, what happens at locations closer to midline? Does the midline bias continue to be linearly related with the true distance from midline, or does it break down and become non-linear? Is there a similar pattern of errors in the up-down direction where an equivalent to midline is less well defined? What is the relationship between these perceptual errors and performance of actions planned based on these errors? Although the answers to these questions are buried deep in the brain, well-designed, clever experiments will hopefully be able to provide answers and contribute to a more complete understanding of human perception and action.
Data and Code Availability
Data and related code are available from: https://github.com/MartinHeroux/EBR_hidden_hand.
References
Botvinick M, Cohen J (1998) Rubber hands ‘feel’ touch that eyes see. Nature 391:756
Brown LE, Rosenbaum DA, Sainburg RL (2003) Movement speed effects on limb position drift. Exp Brain Res 153:266–274
Cumming G, Calin-Jageman R (2016) Introduction to the new statistics: estimation, open science & beyound. Routledge, New York
Curran-Everett D (2017) CORP: minimizing the chances of false positives and false negatives. J Appl Physiol 122:91–95
Desmurget M, Vindras P, Gréa H, Viviani P, Grafton ST (2000) Proprioception does not quickly drift during visual occlusion. Exp Brain Res 134:363–377
Ehrsson HH, Holmes NP, Passingham RE (2005) Touching a rubber hand: feeling of body ownership is associated with activity in multisensory brain areas. J Neurosci 25:10564–10573
Fuchs X, Riemer M, Diers M, Flor H, Trojan J (2016) Perceptual drifts of real and artificial limbs in the rubber hand illusion. Sci Rep 6:24362
Haggard P, Newman C, Blundell J, Andrew H (2000) The perceived position of the hand in space. Percept Psychophys 62:363–377
Héroux ME, Bayle N, Butler AA, Gandevia SC (2018) Time, touch and temperature affect perceived finger position and ownership in the grasp illusion. J Physiol 596:267–280
Kawato M, Wolpert D (1998) Internal models for motor control. Novartis Found Symp 218:291–304
Kuehn E, De Havas J, Silkoset E, Gomi H, Haggard P (2015) On the bimanual integration of proprioceptive information. Exp Brain Res 233:1273–1288
Kuling IA, Brenner E, Smeets JB (2016) Errors in visuo-haptic and haptic-haptic location matching are stable over long periods of time. Acta Psychol 166:31–36
Kuling IA, van der Graaff MC, Brenner E, Smeets JB (2017) Matching locations is not just matching sensory representations. Exp Brain Res 235:533–545
Kuling IA, de Bruijne WJ, Burgering K, Brenner E, Smeets JBJ (2018) Visuo-Proprioceptive matching errors are consistent with biases in distance judgments. J Mot Behav. https://doi.org/10.1080/00222895.2018.1528435
Longo MR, Azañón E, Haggard P (2010) More than skin deep: body representation beyond primary somatosensory cortex. Neuropsychologia 48:655–668
Medina J, Coslett HB (2010) From maps to form to space: touch and the body schema. Neuropsychologia 48:645–654
Paillard J, Brouchon M (1968) Active and passive movements in the calibration of position sense. In: Freeman SJ (ed) The neuropsychology of spatially oriented behavior. Dorsey Press, Homewood, pp 37-55 (Rev 92:1651–1697)
Proske U, Gandevia SC (2012) The proprioceptive senses: their roles in signaling body shape, body position and movement, and muscle force. Physiol Rev 92:1651–1697
Qureshi HG, Butler AA, Kerr GK, Gandevia SC, Héroux ME (2018) Effects of horizontal distance and limb crossing on perceived hand spacing and ownership: Differential sensory processing across hand configurations. Sci Rep 8:17699
Rincon-Gonzalez L, Buneo CA, Helms Tillery SI (2011) The proprioceptive map of the arm is systematic and stable, but idiosyncratic. PLoS One 6:e25214
Romano D, Marini F, Maravita A (2017) Standard body-space relationships: fingers hold spatial information. Cognition 165:105–112
Samad M, Chung AJ, Shams L (2015) Perception of body ownership is driven by Bayesian sensory inference. PLoS One 10:e0117178
Seabold S, Perktold J (2010) Statsmodels: econometric and statistical modeling with python. In: Proceedings of the 9th Python in Science Conference, vol 57, p 61
Tsay A, Savage G, Allen TJ, Proske U (2014) Limb position sense, proprioceptive drift and muscle thixotropy at the human elbow joint. J Physiol 592:2679–2694
van der Dobbelsteen Smeets JBJ, JJ, de Grave DJD, van Beers RJ, and Brenner E (2016) sensory integration does not lead to sensory calibration. Proc Natl Acad Sci USA 103:18781–18786
van Beers RJ, Sittig AC, Denier van der Gon JJ (1996) How humans combine simultaneous proprioceptive and visual position information. Exp Brain Res 111:253–261
van Beers RJ, Sittig AC, Gon JJ (1999) Integration of proprioceptive and visual position-information: An experimentally supported model. J Neurophysiol 81:1355–1364
van Beers RJ, Wolpert DM, Haggard P (2002) When feeling is more important than seeing in sensorimotor adaptation. Curr Biol 12:834–837
Wann JP, Ibrahim SF (1992) Does limb proprioception drift? Exp Brain Res 91:162–166
Wilson ET, Wong J, Gribble PL (2010) Mapping proprioception across a 2D horizontal workspace. PLoS One 5:e11851
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work was supported by the National Health and Medical Research Council (https://www.nhmrc.gov.au/), APP1055084.
Rights and permissions
About this article

Cite this article
Qureshi, H.G., Butler, A.A., Kerr, G.K. et al. The hidden hand is perceived closer to midline. Exp Brain Res 237, 1773–1779 (2019). https://doi.org/10.1007/s00221-019-05546-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-019-05546-7