
Abstract
When someone grasps an object, the grasp depends on the intended object manipulation and usually facilitates it. If several object manipulation steps are planned, the first step has been reported to primarily determine the grasp selection. We address whether the grasp can be aligned to the second step, if the second step’s requirements exceed those of the first step. Participants grasped and rotated a dial first by a small extent and then by various extents in the opposite direction, without releasing the dial. On average, when the requirements of the first and the second step were similar, participants mostly aligned the grasp to the first step. When the requirements of the second step were considerably higher, participants aligned the grasp to the second step, even though the first step still had a considerable impact. Participants employed two different strategies. One subgroup initially aligned the grasp to the first step and then ceased adjusting the grasp to either step. Another group also initially aligned the grasp to the first step and then switched to aligning it primarily to the second step. The data suggest that participants are more likely to switch to the latter strategy when they experienced more awkward arm postures. In summary, grasp selections for multi-step object manipulations can be aligned to the second object manipulation step, if the requirements of this step clearly exceed those of the first step and if participants have some experience with the task.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
In everyday life, we frequently grasp and manipulate objects. Thereby, each grasp foreshadows—and usually facilitates—the intended object manipulation. Even if we do not think about grasp selections too much, our grasps reflect intricate knowledge of the physical and functional properties of objects, the planned task, and our own movement capabilities. To investigate these anticipatory planning processes in the lab, Rosenbaum et al. (1990) developed the bar-transport task. In these types of experiments, for instance, participants were asked to grasp a horizontal bar in order to place its left or right end on a target disk. To complete the task, participants had to rotate the bar by 90°. It was reliably observed that participants grasped the bar with an underhand grip before placing the left end of the bar on the disk but used an overhand grip before placing the right end of the bar on the disk. Accordingly, participants end up in a medial end posture, which increases movement speed and accuracy (Rosenbaum et al. 1996; Short and Cauraugh 1999). This preference for ending in a medial posture was originally termed end-state comfort effect (Rosenbaum and Jorgensen 1992; Rosenbaum et al. 1990). Such anticipatory behavior has since been demonstrated in a considerable number of tasks, populations, and species (for reviews see Herbort 2013; Rosenbaum et al. 2012; Wunsch et al. 2013).
Anticipatory grasping has been extensively studied for one-step object manipulations. However, in everyday life, object manipulations often involve more than one step. For example, we may grasp a glass, pour water in it, and then drink from it. Or we grasp a pen, remove the cap, and then take notes. For the grasp selection process, multi-step object manipulations pose additional challenges. For example, individual movement segments might be best performed using different grasps. Consider an object that first has to be rotated to a clockwise and subsequently rotated to a counterclockwise orientation (such as the rotary combination lock of a safe). While a prone grasp would be preferable to go to the clockwise position, a supine grasp would be preferable to go to the counterclockwise position. The optimal grasp selection for each movement segment might hence be suboptimal for the other and the effect of such opposing constraints needs to be conciliated.
By now, grasp selections for multi-step object manipulations have received comparatively little attention. However, previous research showed that grasps are primarily aligned to the first object manipulation in an object manipulation sequence (Haggard 1998; Herbort et al. 2017; Seegelke et al. 2012, 2013; Rosenbaum et al. 1990). In an exemplar experiment, participants were asked to move and rotate a cylinder to two different target positions (Seegelke et al. 2013, experiment 1). A pointer that was initially pointing away from the participant was attached to the cylinder. At the first target, the pointer had to either face left or right. Likewise, the pointer had to face either left or right (or to some intermediate directions) at the second position. Regardless of the second target, participants rotated the hand against the direction required to accomplish the first object manipulation step. The requirements of the second object manipulation step only modulated the extent of the arm rotation. Likewise, when participants were required to rotate a fixed circular dial first to one target and then to a target at the exact opposite direction (e.g., from 0° to 45° to −45°), they primarily adjusted the grasp to the first target, even though the excursion of the arm at the time of grasping decreased during the experiment (Herbort et al. 2017). An even stronger dominance of the first object manipulation step was reported in an experiment, in which a bar had to be rotated first by 90° clockwise or counterclockwise and then immediately by 180° or not at all (Rosenbaum et al. 1990). As the bar could be only grasped in two ways (i.e., discrete task), participants had to choose whether to end comfortable after the first or second step. Here, only the first object manipulation step affected grasp selection. A notable exception was provided by Seegelke et al. (2013). In their experiment 2, grasp selections got more strongly affected by the second step than the first step of an object manipulation sequence after participants had some experience with the task.
In summary, in most previous experiments, participants revealed an end-state comfort effect with respect to the first object manipulation step and never with respect to the second step. That is, participants selected grasps that allowed them to adopt a relatively medial, comfortable arm posture after the first object manipulation step at the expense of adopting a relatively excursed, uncomfortable arm posture after the second object manipulation step.
The relatively small effect of the second step in two-step object manipulations is surprising from a biomechanical perspective. The function of the end-state comfort effect has been attributed to biomechanical factors (e.g., Rosenbaum et al. 1996; Short and Cauraugh 1999). According to this reasoning, grasps are adjusted to upcoming object manipulations because they allow them to be carried out faster and more precisely. Evidence for this reasoning comes from two directions. First, the selected grasp determines how accurately (Short and Cauraugh 1999) and how fast (Herbort 2015; Rosenbaum et al. 1996) participants can manipulate an object. Second, participants adjust the grasp more frequently to object manipulations, when the demand for precision at the end of the movement is high (Hughes et al. 2012; Künzell et al. 2013; Rosenbaum et al. 1996). However, from a biomechanical perspective, there should be no reason to adjust the grasp mainly to the first step in a sequence of object manipulations.
This raises the question whether these findings reflect a general constraint of anticipatory grasp planning or whether they are the result of experimental procedures that have been used so far (and that have been devised to address other questions). Currently, it is difficult to decide between both possibilities. In previous experiments, the requirements of the first object manipulation step were difficult to compare to that of the second step. For example, the two steps may have differed not only with respect to the required rotation of an object, but also with respect to the position, at which the object had to be moved (Seegelke et al. 2012; Rosenbaum et al. 1990) or whether the rotation direction was predetermined or not (Rosenbaum et al. 2012). Moreover, if anything, the requirements of the first step were greater or about equal to those of the second step. For example, in Seegelke et al.’s (2013) experiments, the cylinder orientations required at the first positions were of the same magnitude than those required at the second position. In Rosenbaum’s (1990) experiment, a 90° vs. −90° rotation task, which typically results in a robust end-state comfort effect, was followed by a 0° vs. 180° rotation task, which typically results in a much weaker end-state comfort effect (Rosenbaum et al. 1996). Finally, it is possible that participants did not have sufficient time to adapt their grasps to the two-step object manipulations, because the experiments were relatively short. However, participants adapted only gradually to changes in task demands of single-step object manipulations (Herbort et al. 2014; Künzell et al. 2013) or two-step object manipulations (Herbort et al. 2017; Seegelke et al. 2013). Hence, participants may not have had sufficient time to adapt to the task in several previous experiments. However, even if participants have enough time to adapt their grasps to multi-step object manipulations and even if the first and second object manipulation steps have the same requirements with respect to the end-state after each rotation step, participants still primarily adjust the grasp to the first step (Herbort et al. 2017). This suggests that factors other than biomechanical constraints determine grasp selections for multi-step object manipulations.
In sum, it is unclear whether participants can adjust their grasp to the second step of an object manipulation sequence. In the present experiment, we address two questions. First, we want to test whether participants align their grasp to the second step of a two-step object manipulation if the requirements of the second step exceed those of the first step. Second, if this is the case, we want to examine how much experience with the two-step task is needed until participants adapt their grasp to the second object manipulation step. We address these questions by extending previous research in various ways. In the present experiment, the two object manipulation steps only differ with respect to the required final dial orientation. Moreover, participants have ample opportunity to adapt their grasps to the two-step object manipulations during several blocks of two-step practice. In our experiment, we asked participants to grasp and rotate a dial to two subsequent positions. The first object manipulation step was always a small rotation from the 0° position to the 30°, in clockwise or counterclockwise direction. In the second step, the dial had to be rotated in the opposite direction. The position of the second target was varied between groups and could be either 30°, 90°, or 150°. Hence, the requirements of the second rotation segment could be identical or larger than those of the first segment. Additionally, we asked participants to directly rotate the dial to the positions involved in the two-step rotations, for comparison.
For analysis, we will compare whether grasps are primarily aligned to the first, second, or neither of the steps in the two-step dial rotations. If participants can adjust their grasp to the requirements of a second object manipulation step, we expect that participants select grasps that reduce the excursion of the arm at the end of the second object manipulation step at the expense of increasing it at the end of the first step. That is, when the first rotation is in clockwise direction and the second in counterclockwise direction, grasps are expected to be always more supine than when the first rotation is in counterclockwise direction and the second in clockwise direction. We expect this to be the case if the extent of the second object manipulation step is larger than that of the first step. If the requirements of both steps are identical, we predict that grasp selections are primarily determined by the first object manipulation step, based on previous findings (e.g., Herbort et al. 2017). Finally, we predict that participants need some time to adapt grasp selections to the two-step task.
Methods
Participants
Sixty participants were tested (43 female, 17 male, mean age 28 years, sd = 8). According to a German Translation of the handedness scale of the Lateral Preference Inventory (Coren 1993), all participants were right-handed. Participants either received course credit or a payment of 9 €. Informed consent was obtained from all individual participants included in the study.
Stimulus and apparatus
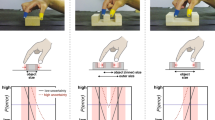
Figure 1a shows the general setup of the experiment. Participants were seated in front of a table on which a start button (3 × 4.5 × 2.5 cm), a circular knob (diameter 8 cm), and a back projection screen (80 × 50 cm) were installed. The start button was located between participant and knob (distance from knob 35 cm), and served as a resting position for the hand between trials. Behind the knob was a back projection screen on which a LCD projector presented a pointer and the targets. The pointer and targets were presented 22 cm above the knob. A white pointer (length 5.5 cm) indicated the orientation of the dial with a 1:1 ratio. The pointer moved within a circle of white linear marks (interval 10°).

Setup, design, and dependent variables. a The figure shows the setup of the experiment. b The figure shows how the grasp orientation (GO) was computed. The white squares represent the positions of the index finger and thumb sensor. c–e The figure gives fictive examples on how ΔGO was computed. Each plot shows a cartoon of the trajectory of the hand orientation (as defined in b) during the rotation to −30° and then to +90° (black), and during the rotation to +30° and then to −90°. The insets show the grasp orientations for both dial rotation sequences before the onset of first rotation step (iGO). The difference between these orientations is termed ΔGO. c If grasps are more prone (+) for sequences beginning with a clockwise (−) rotation than for sequences beginning with a counterclockwise rotation (+), ΔGO gets positive. This allows to end the first segment in relatively medial hand orientations (close to zero) but results in highly excursed hand orientations after the second step. d If the same grasps are used for both sequences, ΔGO is zero. e If grasps are more supine (−) for sequences beginning with a clockwise (−) rotation than for sequences beginning with a counterclockwise rotation (+), ΔGO gets negative. This results in excursed hand orientations after the first step and relatively medial hand orientations after the second step
Procedure and design
The experiment consisted of two types of blocks (one-step vs. two-step blocks). In two-step blocks, participants had to execute two-step dial rotations. The specific kind of two-step sequence was varied between three independent groups. All participants had to rotate the pointer first to the 30° position clockwise or counterclockwise, and immediately afterwards to another position in the opposing direction according to group. The 30°−30° group had to rotate the pointer immediately afterwards to the 30° position in the opposing direction, the 30°−90° group had to rotate the pointer immediately to the 90° position in the opposing direction, and the 30°−150° group had to rotate the pointer immediately to the 150° position in the opposing direction. For example, the participants of the 30°−90° group either rotated the dial first to the +30° position and immediately afterwards to the −90° position or first to the −30° position and then to the +90° position.
Each two-step trial began when the participant held the start button for 1 s. Then, the tick at the first target position turned green, a green arc between the 0° and the target appeared, and a short click was played (1760 Hz for 25 ms). This was the sign for the participant to grasp the knob and rotate the dial. The first target was considered hit when the pointer was within 2.5° of the target for 100 ms. Afterwards, the tick at the second target turned green, a green arc between the first and the second target appeared, and a click was played. The second target was considered hit when the pointer stayed within 2.5° for 100 ms. Participants were instructed to always use the right hand, to grasp the knob firmly without readjusting the grasp, and to release the knob once the trial was completed. Participants were not given specific verbal instruction with respect to the movement speed or accuracy, or how they should place their fingers on the dial. Note that a relatively high degree of accuracy was required to complete the task.
In one-step blocks, all participants had to rotate the knob to the target positions that could be experienced in the respective two-step blocks. For the 30°−30° group, the target positions were 30° and −30°. For the 30°−90° group, the target positions were −90°, −30°, 30°, and 90°. For the 30°−150° group, the target positions were −150°, −30°, 30°, and 150°. The procedure of the one-step trials was essentially identically to that of the two-step trials up to the point at which the first target was reached. In one-step trials, the target was considered hit when the pointer stayed within 2.5° of the target for 100 ms.
The experiment consisted of 10 blocks of 64 trials each. Blocks 1 and 10 were one-step blocks and blocks 2–9 were two-step blocks. Each block consisted of eight sub-blocks of eight trials, in which all trial types occurred with equal frequency in pseudorandom order. Before the experiment, participants could practice one-step and two-step trials. Participants required on average 50 min for the session (640 trials). Blocks were separated by self-paced breaks.
Data recording and analysis
Participant’s arm movements were recorded with an electromagnetic motion tracker (Ascencion trakSTAR) at a sample rate of 100 Hz. Sensors were attached to the tip of the participant’s thumb and index finger, to the forearm close to the wrist, and to the knob. The data were smoothed with a bidirectional second-order Butterworth filter with a cut-off frequency of 5 Hz. The position of index finger and thumb sensor on the dial plane were used to compute the grasp orientation (GO, Fig. 1b). The 0° position was defined as a grasp, in which the index finger was directly above the thumb. Positive GO denotes grasp orientations that are more prone than the 0° grasp orientation, and negative GO denotes grasp orientation that are more supine than the 0° grasp orientation. The forearm sensor data were used to disambiguate finger configurations that could have resulted from either an extreme pronation or supination. For each trial, the initial grasp orientation (iGO) was extracted at the beginning of the first knob rotation segment, when the knob rotation rate first exceeded 20°/s. Except for two trials, in which the total movement time lasted more than 10 s (both trials in condition 90°), all trials were entered in the analysis.
As we focus on the effect of the object manipulations on grasp selections, we simplified the analyses by computing the variable ΔGO (Fig. 1c–e). The variable ΔGO reflects the difference in the initial grasp orientations selected for the two different object manipulations. In colloquial term, ΔGO could be considered the magnitude of the end-state comfort effect. In single-step trials, ΔGO was computed separately for the ±30°, ±90°, and ±150° rotations (ΔGO30° = iGO−30°−iGO+30°, ΔGO90° = iGO−90° − iGO+90°, ΔGO150° = iGO−150° − iGO+150°). In two-step trials, ΔGO was computed with respect to the first target in a sequence (i.e., ΔGO30°30° = iGO−30°+30° − iGO+30°−30°, ΔGO30°90° = iGO−30°+90° − iGO+30°−90°, ΔGO30°150° = iGO−30°+150° − iGO+30°−150°). Thus, ΔGO could assume positive and negative values. Figure 1c–e illustrates the implications for two-step trials. A positive ΔGO implies that participants adjust their grasps mainly to the first target (Fig. 1c). This results in relatively medial grasp orientations after the first step and is typically found in one-step rotations. However, in two-step sequences, this implies that grasps are relatively excursed after the second step. A negative ΔGO implies that grasps are mainly adjusted to the second target in the sequence (Fig. 1e). While grasp orientations get relatively excursed after the first step, they are relatively medial after the second step. Finally, if iGOs are identical for different dial rotation sequences, ΔGO is zero (Fig. 1d). In sum, the sign of ΔGO reflects whether participants’ initial grasp orientation is predominantly determined by the first (positive) or the second (negative) step. The magnitude of ΔGO reflects how strong iGOs differ for different dial rotation sequences. The ΔGOs of one-step trials may serve as references for two-step trials. The variable ΔGO30° represents how grasps are adjusted to single-step rotations to the first target of each two-step sequence. As the second step always requires a reversal of the movement direction, the values −ΔGO30°, −ΔGO90°, and −ΔGO150° represent how grasps are adjusted to single-step rotations directly to the second target of the respective two-step sequences. Additionally, movement times, errors, and grasp variability have been recorded. The specification of these variables and their analysis is provided in Online Resource 1.
Results
One-step rotations
Effect of rotation angle
For analysis, we calculated the mean ΔGO of the one-step rotations for each participant and rotation extent. In the 30°–30° group, ΔGO30° was 24.1° (sd = 14.8°). In the 30°–90° group, ΔGO30° was 46.7° (sd = 20.5°) and ΔGO90° was 87.0° (sd = 27.2°). In the 30°−150° group, ΔGO30° was 53.1° (sd = 32.9°) and ΔGO150° was 128.9° (sd = 44.7°). One-sample t tests revealed that all the ΔGOs of one-step rotations differed significantly from zero: all ts ≥ 7.214, all ps < 0.001, all d z s ≥ 1.613. Thus, the grasps were adapted to the upcoming rotations in all conditions. Additionally, in the 30°–90° and the 30°–150°, ΔGO30° was smaller than ΔGO90° and ΔGO150°, respectively: both ts ≥ 8.343, both ps < 0.001, both d z s ≥ 1.866. Thus, participants’ grasps were adapted to the extent of the dial rotation.
Effect of two-step sequence on 30° rotation
An unexpected finding was that grasp selections for the 30° rotations depended on the group. We compared ΔGO30 between groups with an ANOVA with between-participant factor two-step sequence. It revealed a main effect of group: F(2,57) = 8.082, p = .001, η 2 p = 0.758. Independent sample t tests showed that ΔGO30° of the 30°–30° group was significantly smaller than that of the 30°–90° group, t(38) = 3.997, p < .001, d s = 1.264. The ΔGO30° of the 30°–90° group and 90°–150° group did not differ significantly: t(38) = 0.742, p = .463, d s = 0.234. We provide additional analyses of the single-step blocks in Online Resource 1. In short, these analyses show that the difference between groups cannot be fully attributed to carry-over effects from the two-step trials but partially from interspersing ±30° rotations with ±90° or ±150° rotations.
Two-step rotations
Effect of block and two-step sequence
Figure 2 (top) shows ΔGOs for the two-step rotations of the three two-step sequences over the course of the experiment. For comparison, the figure also shows the ΔGOs from the one-step rotations to each sub-goal of the two-step sequence from directly moving to the first or second target.

Effect of block, two-step sequence, and adapter type on ΔGO. The top row shows the data averaged over all participants; the middle and lower row show the data split by adapter type. The black lines show ΔGO of two-step rotations. Positive ΔGO indicates that the grasp was aligned to the first step, negative ΔGO indicates that the grasp was aligned to the second step, and zero ΔGO indicates no alignment of the grasp to different object manipulations. The horizontal lines show the ΔGO when participants rotate the dial only to the first target (dotted) or the second target (dashed) of the respective two-step dial rotations, as assessed in the one-step blocks. The empty squares show the ΔGO of the first eight trials of the first block. Error bars and shaded areas indicate 1 s.e.m
A split-plot ANOVAFootnote 1 with within-participant factor block (1, 2,…, 8) and between-participant factor two-step sequence revealed a main effect of block, F(7,399) = 29.534, p < .001, η 2 p = 0.341; an effect of two-step sequence, F(2,57) = 11.447, p < .001, η 2 p = 0.287; and an interaction, F(14,399) = 8.25, p < .001, η 2 p = 0.224. Descriptively, the differences between the groups increase during the two-step blocks.
Effect of two-step sequence in final two-step blocks
To test whether ΔGOs differed between groups after participants adapted to the two-step rotations, we compared the average ΔGOs of the last four two-step blocks (ΔGO5–8), in which grasp selections remained fairly constant.Footnote 2 The ΔGO5–8 of the 30°–30° group (m = 15.8°, sd = 12.3°) was more positive than that of the 30°–90° group (m = −20.2°, sd = 42.6°): t(38) = 3.630, p < .001, d s = 1.148. Likewise, the ΔGO5–8 of the 30°–90° group was more positive than that of the 30°–150° group (m = −70.2°, sd = 76.6°): t(29.7) = 2.551, p < .016, d s = 0.807. One-sample t tests revealed that ΔGO5–8 was significantly above zero in the 30°–30° group: t(19) = 5.750, p < .001, d z = 1.286. In the 30°–90° and 30°–150° groups, ΔGO5–8s were significantly lower than zero: t(19) = −2.118, p = .048, d z = 0.473, and t(19) = −4.098, p = .001, d z = 0.916, respectively.
Effect of block by two-step sequences
To test in which groups ΔGO changed over the course of the two-step blocks, we compared ΔGO of each of the first four two-step block with ΔGO5–8 for each two-step sequence with paired t tests. In the 30°–30°, ΔGO decreased on average by 6.4° (sd = 11.1°) from the first to the last four two-step blocks: t(19) = 2.574, p = .019, d z = 0.576. No significant differences were found between blocks 2, 3, or 4 and the last four blocks. In the 30°–90° group, ΔGO decreased on average by 29.1° (sd = 28.3°) from the first to the last blocks: t(19) = 4.603, p < .001, d z = 1.029. No significant differences were found between blocks 2, 3, or 4 and the last four blocks for this group. In the 30°–150° group, ΔGO decreased on average by 64.2° (sd = 53.9°) from the first to the last blocks: t(19) = 5.326, p < .001, d z = 1.191. In this group, the ΔGO of block 2 and 3 was more positive than that of the last blocks: both t(19) ≥ 3.778, p ≤ .001, dz ≥ 0.845.
Comparison with one-step rotations
Finally, we compared the two-step rotations (ΔGO5–8) with the one-step rotations directly to the first (ΔGO30°) and second targets (ΔGO−30°, ΔGO−90°, or ΔGO−30°), which are identical to (−ΔGO30°, −ΔGO90°, and −ΔGO150°, respectively) of the two-step rotations. For each two-step sequence, ΔGO of the two-step rotations in the final four blocks differed from one-step rotations directly to the first or second target of the two-step rotation: all t(19)s ≥ 3.832, all ps ≤ 0.001, d z ≥ 0.857.
Analysis by adapter type
Adapter types
The inspection of the data revealed that participants appeared to fall into two subgroups. One group of participants adapted their grasps only slightly to the different two-step rotations and typically converged to a ΔGO around zero at the end of the two-step blocks. We will call these participants weak adapters. The other group of participants adapted their grasps relatively strongly to different rotation sequences. Their ΔGO tended to converge toward a strongly negative value, indicating that they primarily aligned their grasps to the second target of the two-step rotation. These participants will be referred to as strong adapters. For further analysis, we assigned each participant to one subgroup depending on ΔGO5–8. As participants showed a relatively wide range of ΔGOs in the one-step condition, we classified each participant’s grasp selections in the two-step block relative to her grasp selections in the one-step blocks. A participant was considered a weak adapter, if her ΔGO5–8 was closer to her ΔGO when rotating the dial directly to the first target of the two-step sequence (ΔGO30°) than her ΔGO when rotating the dial directly to the second target of the sequence (−ΔGO30°, −ΔGO90°, or −ΔGO150°, depending on the group). Otherwise, she was considered a strong adapter. Figure 3 shows individual ΔGO5–8 for weak and strong adapters. Figure 2 shows ΔGO over individual blocks split by adapter type.

Effect of two-step sequence on ΔGO in the last four two-step blocks (ΔGO5–8). Each dot represents an individual participant
The proportion of strong adapters depended on the two-step sequence, p = .002 (Fisher’s exact test). The number of strong adapters was one (5%), six (30%), and eleven (55%) in the 30°–30° group, 30°–90° group, and 30°–150° group, respectively.
Effect of block, two-step sequence, and adapter type
As there was only one strong adapter in the 30°–30° group, this group was not further analyzed. A repeated measures ANOVA on ΔGO with a within-participant factor block (1st vs. 5–8) and between-participant factors two-step sequence (30°–90° vs. 30°–150°) and adapter type (weak adapter vs. strong adapter) revealed the following main effects. ΔGO got more negative from the first to the last four blocks: F(1,36) = 63.402, p < .001, η 2 p = 0.638. Strong adapters had a more negative ΔGO than weak adapters: F(1,36) = 73.343, p < .001, η 2 p = 0.671. There was no significant difference between the 30°–90° and 30°–150° group: F(1,36) = 1.797, p = .188, η 2 p = 0.048. The main effects were modulated by the following interactions. ΔGO decreased more from the first to the last four blocks in the 30°–150° group than in the 30°–90° group: F(1,36) = 4.976, p = .032, η 2 p = 0.121. Furthermore, ΔGO decreased more from the first to the last four blocks for the strong adapters than for the weak adapters: F(1,36) = 14.369, p = .001, η 2 p = 0.285. The three-way interaction was not significant: F(1,36) = 2.651, p = .112, η 2 p = 0.069.
Effect of block by two-step sequence and adapter type
Next, we tested whether ΔGO changed during the two-step blocks by comparing each of the first four blocks with the mean of the last four two-step blocks with paired t tests. For all two-step sequences and adapter types (including the weak adapters of the 30°–30° group), ΔGO decreased: all ts ≥ 2.573, all ps ≤ 0.026, all d z s ≥ 2.646. For the strong adapters in the 30°–150° group, ΔGO was more positive in the second two-step and third block than in the last blocks: both t(10) ≥ 3.297, p ≤ .008, dz ≥ 0.994. Moreover, the ΔGO of the weak adapters of the 30°–150° group was more positive in the 3rd block than in the last blocks: t(8) = 2.507, p = .037, d z = 0.836. No other effects were significant.
Effect of two-step sequence and adapter type in final two-step blocks
Next, we tested how the two-step sequence affected ΔGO in the last four two-step blocks (ΔGO5–8). A between-participant ANOVA on ΔGO5–8 with factors two-step sequence (30°–90° vs. 30°–150°) and adapter type (weak vs. strong adapters) was conducted. Not surprisingly, ΔGO5–8 of strong adapters was more negative than that of weak adapters: F(1,36) = 121.200, p < .001, η 2 p = 0.771. The variable ΔGO5–8 was more negative in the 30°–150° group than in the 30°–90° group: F(1,36) = 7.429, p < .010, η 2 p = 0.171. Finally, the strong adapters were affected more by the two-step sequence than the weak adapters: F(1,36) = 5.788, p < .021, η 2 p = 0.139. Post hoc t tests revealed that ΔGO5–8s differed between two-step sequences for the strong adapters: t(12.9) = 3.151, p = .008, d s = 1.230. No difference between the 30°–90° and 30°–150° group was found for weak adapters: t(21) = 0.422, p = .677, d s = 0.180. However, weak adapters’ ΔGO5–8s in the latter groups differed significantly from those of the weak adapters in the 30°–30° group: both ts ≤ 2.355, both ps ≤ 0.025, both d s ≥ 0.829.
The weak adapters’ ΔGO5–8 in the 30°–30° group was significantly larger than zero, indicating that grasps were aligned to the first target of the dial rotation: t(18) = 6.208, p < .001, d z = 1.424. The weak adapters’ ΔGO5–8 in the 30°–90° group did not differ significantly from zero: t(13) = 1.112, p = .286, d z = 0.297. Likewise, the weak adapters’ ΔGO5–8 in the 30°–150° group did not differ significantly from zero: t(8) = 0.319, p = .758, d z = 0.106. The strong adapters adapted their grasps significantly to the second target in the 30°–90° and 30°–150° group: both ts ≤ −8.777, both ps < 0.001, both d z s ≥ 0.606.
Effect of two-step sequence and adapter type on initial two-step trials
Additionally, we wanted to test to which target the grasps of the different adapter types were aligned on the very first two-step trials. This was done by computing ΔGO for the first eight trials of the first two-step block. The values are shown as empty squares in Fig. 2. The ΔGO was descriptively positive in all cases. This effect was significant for all tests (all ts ≥ 4.850, all ps ≤ 0.001, all d z ≥ 1.250) except the strong adapters of the 30°–150° group: t(10) = 1.586, p = .144, d z = 0.478.
Comparison with one-step rotations
In the weak adapters, the ΔGO5–8 of each two-step sequence differed from one-step rotations directly to the first target or last target in the respective two-step rotation: all ts ≥ 3.796, all ps ≤ 0.001, dz ≥ 0.871. In the strong adapters, ΔGO5–8 of the two-step rotations differed significantly from rotations directly to the first target: both ts ≥ 8.468, all ps ≤ 0.001, all d z ≥ 2.553. By contrast, strong adapter’s ΔGO for two-step rotations and rotations directly to the second target did not differ significantly for the 30°–90° sequence (t[5] = 2.465, p = .057, d z = 1.006) and 30°–150° sequence (t(10) = 0.807, p = .438, d z = 0.255). Due to the low number of strong adapters in both groups, these non-significant effects should not be interpreted.
Discussion
We addressed whether grasps may be aligned to the second step of an object manipulation sequence when the requirements of the second step outweigh those of the first step. We further analyzed how quickly participants adapt to the requirements of two-step rotations. To test this, we asked participants to rotate a dial first by a small extent in clockwise or counterclockwise direction (30°) and immediately afterwards to the 30°, 90°, or 150° target in the opposite direction. We recorded how grasps for object manipulations with different initial directions differed and how the difference changed over the course of the experiment.
After participants gained some experience with the task, grasps were affected by both object manipulation steps, because grasps for two-step rotations differed from the grasps used to rotate the dial directly to either target of the two-step sequence. When the requirements of the first and second dial rotation step were identical in the 30°–30° group, participants mostly adapted the grasp with respect to the first target. The second rotation step had a stronger effect in the 30°–90° group and the 30°–150° group. In both conditions, participants selected grasps that reduced the arm excursion after the second, longer step at the expense of increasing the arm excursion after the first, shorter step. However, on average, the adjustment to the second target was surprisingly small. For example, when asked to rotate the dial directly to the 150° position, participants used a relatively excursed grasps. However, when the 150° rotation was preceded by a much smaller rotation to the −30° position in the two-step blocks, the excursion of the grasp was reduced to about 50%. Finally, in all groups, the grasps selected in the first block of 64 trials differed from the grasps used at the end of the two-step blocks. In the 30°–150° group, participants had not adapted until having performed each of the two sequences 96 times. This suggests that experience with two-step rotations is necessary to be able to adapt grasp selections to both steps.
The results suggest that individual participants dealt with the two-step rotations in different ways. Weak adapters ceased adjusting their grasp to the upcoming rotations. This behavior is hard to conciliate with a purely biomechanical account. It seems difficult to explain why grasps were strongly adjusted to the direction of 150° one-step rotations but not at all when the 150° rotation was preceded by a comparably minor 30° rotation in the opposite direction. Strong adapters tended to align the grasp clearly to the second rotation step, as could be expected from a biomechanical account. As participants employed two different strategies, we will discuss the results in the light of the different adapter types. First, we discuss differences between adapter types that could possibly account for the group differences. Second, we offer an explanation for the different grasp selections of strong and weak adapters. Finally, we discuss the effect of the two-step sequence on the one-step rotations.
Correlates of adaptation type
Interindividual differences with respect to grasp selection have been reported for various object manipulation tasks (Hughes et al. 2012; Janssen et al. 2010; Rosenbaum et al. 1996; Seegelke et al. 2012). In these studies, some participants adapted their grasps to upcoming rotations whereas other did not. Different explanations for the interindividual differences, such as differences in how the task requirements were perceived and differences in cognitive abilities, have been put forward. The interindividual differences revealed in the present experiment differed from those reported previously in a subtle manner. While both adapter types adjusted their grasps to upcoming one-step rotations, they adjusted their grasps in different ways to two-step object manipulations. In the following, we consider variables that might correlate with the adaptation type and might offer an explanation for the interindividual differences.
First, we checked whether the collected demographic information correlated with participants’ adaptation to the two-step rotations. Whether a person was a weak or strong adapter did not depend on sex (Fisher’s exact test, p = 1.000) or age, t(58) = 0.144, p = .886, d s = 0.041.
Second, some participants may have had a more accurate explicit representation of the required movement sequences than other and thus were better at planning the grasp. To control for this possibility, we showed participants printouts of the two stimuli, which were indicating 30° and −30° rotations (i.e., what was shown on the screen before they started rotating the dial). We then asked them to mark the positions on the printouts, to which they had to rotate the dial in the second steps of two-step movements. Most participants marked the second targets relatively accurately. An ANOVA on the absolute difference between the marked and the actual positions of the second targets, which depended on the two-step sequence, with between-participant factors two-step sequence (30°–90° vs. 30°–150°) and adapter type (weak vs. strong adapters) neither revealed a main effect of adapter type, (F[1,36] = 0.446, p = .509, η 2 p = 0.012) nor an interaction (F(1,36) = 0.999, p = .324, η 2 p = 0.027). Hence, the adapter types did not differ with respect to the explicit representation of the two-step rotation. It was fairly accurate in both cases.
Third, adaptation types may have affected planning and execution of the object manipulation. To check whether this was the case, we compared reaction times, the duration of the grasping movement, the duration of the object manipulation steps, and the movement accuracy of both steps between adapter types (Online Resource 1, Sect. 1; Fig. ESM1; Fig. ESM2). Descriptively, weak adapters initiated their reach-to-grasp movement quicker. Likewise, the duration of the grasping movement tended to be shorter. Otherwise, no notable differences between the adapter types were found.
Fourth, both strong and weak adapters adjusted their grasp clearly to the requirements of the different one-step rotations (Online Resource 1, Sect. 3, Table S2). However, when grasping the dial, strong adapters’ arm excursions were 25–50% higher than those of weak adapters.
In summary, a comparison of the weak adapters and strong adapters revealed that strong adapters already excursed their arm more during one-step trials and that they tended to require a little more time for initiating and completing the reach-to-grasp movement prior to the dial rotation. Finally, the further the extent of the second rotation step, the higher was the number of strong adapters in a condition. However, as these analyses were carried out post hoc, any apparent differences should be interpreted with caution.
Planning and adaptation
In the following section, we want to offer an explanation for the grasp selections of weak and strong adapters. The explanation is based on the following assumptions. First, we propose that grasp selections were the result of two parallel adaptation processes. The two processes are reminiscent of explicit and implicit strategies for movement planning (Mazzoni and Krakauer 2006; Sülzenbrück and Heuer 2009; c.f.; Abeele and Bock 2001). The first kind of adaptation pertains to the representation of the object manipulation during planning. We suggest that participants consider exclusively the first step of an object manipulation sequence by default (first-step planning). However, under specific circumstances, they might switch to a more elaborate planning strategy that takes into account further steps (holistic planning). This assumption is plausible because the representation or framing of an object manipulation task also affects grasp selections in one-step object manipulations (Herbort and Butz 2012; Herbort et al. 2014; Huhn et al. 2016). The second kind of adaptation pertains to how a representation of an anticipated object manipulation is translated into a grasp orientation. It is assumed that grasp selections are continuously updated based on feedback from executed object manipulations, which most likely incorporates task-related and biomechanical factors. For example, when a rotation ends in an uncomfortable posture, participants might excurse the arm more when the same rotation is executed again. Such continuous adaptation processes to identical tasks have been reported for single-step object manipulations (Herbort et al. 2014; Künzell et al. 2013).
Second, we assume that first-step planning constrains the selection of possible grasps. Specifically, we assume that grasps cannot be tuned against the direction of the upcoming dial rotation. However, it is possible to specify how strong or weak the upcoming object manipulation affects the grasp. In the case of first-step planning, it is possible to select grasps that are initially comfortable, have a comfortable end-state, or any mixture of both. However, this mode of planning does not select grasps that have an uncomfortable initial and end-state. This assumption is supported by the finding that ΔGO30° for a one-step rotation ranged between practically zeroFootnote 3 and 149° but no participant showed an inverted end-state comfort effect. Likewise, we know of no such reports in the literature. For the more elaborate planning mode, we do not impose this constraint. For example, it might be that participants reframe the task as a rotation to the second target or blend the grasps that would be selected for single-step rotations to the involved targets. In both cases, grasps could be tuned against the requirements of the first step.
Third, we assume that biomechanical factors determine how well a grasp is suited to execute an object manipulation. In the case of the 30°–90° and 30°–150° rotations, one might argue that it is biomechanically optimal to adapt the grasp (mostly) to the second object manipulation step, because the requirements of this step are highest. This assumption is supported by the finding that the further participants had to rotate the dial, the more they excursed their grasps (e.g., present one-step blocks; Herbort 2015). For the 30°–30°, the requirements of both steps are more or less identical, at least when concerning the end-state after each step.
These three assumptions explain the results as follows. We assumed that strong adapters switch to holistic planning, which does not constrain grasp selections. Accordingly, participants’ grasp selection appears biomechanically reasonable. As it can be assumed that the optimal grasp for the 30°–90° and 30°–150° rotations is mostly defined by the second step, grasp selections for two-step rotations should be somewhat less excursed than one-step rotations directly to the second target. This corresponds to the strong adapters’ grasp selections for two-step rotations. By contrast, the weak adapters always use first-step planning. In the 30°–90° and 30°–150° conditions, the biomechanical optimal strategy would be adjusting the grasp to the second step. However, this would mean adjusting the grasp against the requirements of the first object manipulation step, which is assumed to be impossible when using first-step planning. Hence, within the limits of their strategy, the best option is to reduce the excursion of the arm until the end-state comfort effect is not shown anymore (i.e., ΔGO = 0). However, in the 30°–30° group, participants’ ΔGO remains positive throughout the two-step blocks, comparable to earlier reports (Herbort et al. 2017). It could be argued that the learning signal from this condition is too weak to reduce ΔGO to zero.
The question remains why and how some participants stick to first-step planning, while others plan holistically. We would like to suggest that participants only change their planning mode when they notice that their grasp selections result in uncomfortable postures. Several findings are in line with this view. First, in the very early two-step trials, also strong adapters tended to base their grasps on the first object manipulation step (open squares in Fig, 2; Online resource 1, Fig. ESM3 provides data of representative participants). Only after several trials, they aligned their grasps to the second target. Second, strong adapters excursed the arm more during one-step rotations than weak adapters. Consequently, if strong adapters used first-step planning, they would assume more awkward end-states after the second rotation step. Additionally, it could be speculated that these participants adjusted the grasp more strongly, because they were more sensitive to uncomfortable end-states in the first place. Third, participants were more likely to switch the mode of planning for those two-step sequences that made uncomfortable arm postures more likely.
An inspection of the data (Online Resource 1, Sect. 2, Fig ESM3) suggests that participants switched from first-step planning to holistic planning within a few trials, which hints at an explicit change in the planning mode. The data in Fig. ESM3 (in Online Resource 1) also show that grasps may be further adapted after the apparent switch in the strategies, albeit at a much slower pace. This provides additional evidence for the parallel operation of multiple adaptation processes.
Finally, one may wonder why participants did not always use holistic planning. One possible explanation is that a simple strategy may be suboptimal but sufficient in many cases. Likewise, a more elaborate planning strategy may require more effortful planning. At least numerically, reaction times hint in this direction. Participant might thus only give up the simpler mode of planning once they register that the simple plan caused considerable costs during object manipulations. Moreover, it might be possible that the sequential presentation of the rotation target biased participants toward processing the individual movement steps one-by-one rather than holistically (Verwey et al. 2015).
A possible critic to our account might be that the data may as well be explained by assuming that both adapter types consider both targets during planning but assign different weights to the first and second step, possibly based on feedback from the task. While this might be possible, this hypothesis cannot explain why weak adapters end up with a ΔGO of basically zero in the 30°–90° and 30°–150° groups, and why weak adapters of both groups did not differ. Furthermore, because this approach does not suggest a constraint on grasp selections on the cognitive side in the case of the weak adapters, it would require to offer a (biomechanical) explanation for difference between weak and strong adapters.
In summary, we would like to suggest that participants may use different representations of the task. Whether or not participants include later object manipulation steps in their task representations depends on experience. Furthermore, whatever representation participants use, they keep adapting their grasps within the limits of the respective mode of planning. Although this explanation is inline with previous findings and with the presented data, alternative explanations are certainly possible and further research is needed to evaluate them.
Planning gradient
In previous experiments, it has been found that grasp selections for multi-step object manipulation are primarily determined by the first object manipulation step (Rosenbaum et al. 1990; Seegelke et al. 2013; c.f.; Haggard 1998). This has been referred to as planning gradient. Here we show that the planning gradient is not a fixed constraint but depends on how the participants represent the task. However, planning primarily based on the requirements of the first step seems to be the default mode. This mode seems surprisingly hard to overcome. For example, in the 30°–150° group, almost half of the participants did not align the grasp to the second target. This was the case, even though the extent of the second target was considerably larger and participants performed hundreds of two-step rotations.
Effect of two-step sequence on one-step rotations
An unexpected finding was that grasp selections for the 30° rotations differed between two-step sequences. One possible explanation for the finding is that 30° rotations were intermixed with rotations of a higher extent in the 30°–90° and 30°–150° group but not in the 30°–30° group. It has been reported that previously selected grasps affect current grasp selections (Rosenbaum and Jorgensen 1992; Weigelt et al. 2009; c.f.; Rosenbaum et al. 2012). However, in previous cases, different conditions were presented in an ordered sequence from a condition that clearly required one grasp to a condition that clearly required another grasp (e.g., grasping objects at increasingly high positions). By contrast, rotations of different extents and directions were presented randomly in the current experiment. Nevertheless, grasp selections for 90° and 150° rotations carried over to grasp selections for 30° (Online Resource 1, Sect. 4.1). The ΔGO30 for 30° rotations was smaller when following a rotation with an extent of 30° than a rotation with an extent of 90° or 150°. Even though this effect could not fully account for the differences in ΔGO30 between two-step sequence groups, it certainly contributes to it. Moreover, these results show that previous grasps may also carry over to current grasps if different object manipulation tasks are presented in random order.
Another possible explanation might be that the difference resulted from carry-over effects from the two-step rotations on the final one-step block. However, carry-over effects from two-step on one-step rotations can be expected to decrease the ΔGO in the 30°–90° and 30°–150° when compared to the 30°–30° (Herbort et al. 2017). Likewise, the two-step sequence modulated ΔGO30 stronger in the first than in the final one-step block (Online Resource 1, Sect. 4.2). This suggests that the planning processes for one-step rotations and two-step rotations overlap to some extent.
Conclusion
We asked whether participants can adjust the grasp to the second step of two-step object manipulations. We found that participants adjusted the grasp to the second step, if the requirements of second step exceeded that of the first step and if participants had some practice with the task. Moreover, participants employed two different strategies. Some participants almost completely aligned their grasp to the second-step, which is in line with biomechanical task requirements. A surprising number of participants ceased adjusting their grasp to either step. We suggest that these participants consider only the first step during planning but reduce the magnitude of their adjustment to the first step to basically zero over the course of the experiment. This might be considered the biomechanically optimal adaptation to the task within the limit of this planning strategy. The used strategy correlated with the arm postures experienced during the two-step dial rotations. The more the participants experienced uncomfortable postures in the second step, the more likely it was that they switched to adjusting the grasp to the second step. In summary, these results show that an interaction between the biomechanical requirements of a task and the task representation determines how the grasp is aligned to forthcoming multi-segment object manipulations.
Notes
We report Greenhouse-Geisser corrected p-values but uncorrected dfs. Effect sizes are reported as described in Lakens (2013).
A split-plot ANOVA with within-participant factor block (5, 6, 7, 8) and between-participant factor group revealed neither a main effect of block (F[3,171] = 0.038, p = .959, η2 p = 0.001) nor an interaction between block and two-step sequence: F(6,171) = 0.451, p = .766, η2 p = 0.016.
For one participant, ΔGO30° was − 1.03°. The within-participant standard deviation of GO for clockwise and counterclockwise 30° rotations for this participant was 31° and 16°, respectively. For the remaining 59 participants, ΔGO30° had a positive value.
References
Abeele S, Bock O (2001) Sensorimotor adaptation to rotated visual input: different mechanisms for small versus large rotations. Exp Brain Res 140(4):407–410. doi:10.1007/s002210100846
Coren S (1993) The lateral preference inventory for measurement of handedness, footedness, eyedness, and earedness: norms for young adults. Bull Psychon Soc 31(1):1–3.
Haggard P (1998) Planning of action sequences. Acta Psychol 99(2):201–215. doi:10.1016/S0001-6918(98)00011-0
Herbort O (2013) Optimal versus heuristic planning of object manipulations: A review and a computational model of the continuous end-state comfort effect. New Ideas Psychol 31(3):291–301. doi:10.1016/j.newideapsych.2013.01.003
Herbort O (2015) Too much anticipation? Large anticipatory adjustments of grasping movements to minimal object manipulations. Hum Mov Sci 42:100–116. doi:10.1016/j.humov.2015.05.002
Herbort O, Butz MV (2012) The continuous end-state comfort effect: weighted integration of multiple biases. Psychol Res 76(3):345–363. doi:10.1007/s00426-011-0334-7
Herbort O, Butz MV, Kunde W (2014) The contribution of cognitive, kinematic, and dynamic factors to anticipatory grasp selection. Exp Brain Res 232(6):1677–1688. doi:10.1007/s00221-014-3849-5
Herbort O, Mathew H, Kunde W (2017) Habit outweighs planning in grasp selection for object manipulation. Cogn Psychol 92:127–140. doi:10.1016/j.cogpsych.2016.11.008
Hughes C, Seegelke C, Schack T (2012) The influence of initial and final precision on motor planning: individual differences in end-state comfort during unimanual grasping and placing. J Motor Behav 44(3):195–201. doi:10.1080/00222895.2012.672483
Huhn JM, Potts CA, Rosenbaum DA (2016) Cognitive framing in action. Cognition 151:42–51. doi:10.1016/j.cognition.2016.02.015
Janssen L, Crajé C, Weigelt M, Steenbergen B (2010) Motor planning in bimanual object manipulation: two plans for two hands? Motor Control 14(2):240–254
Künzell S, Augste C, Hering M, Maier S, Meinzinger A-M, Sießmeir D (2013) Optimal control in the critical phase of movement: a functional approach to motor planning processes. Acta Psychol 143(3):310–316. doi:10.1016/j.actpsy.2013.04.013
Lakens D (2013) Calculating and reporting effect sizes to facilitate cumulative science: a practical primer for t tests and ANOVAs. Front Psychol 4:863. doi:10.3389/fpsyg.2013.00863
Mazzoni P, Krakauer JW (2006) An implicit plan overrides an explicit strategy during visuomotor adaptation. J Neurosci 26(14):3642–3645. doi:10.1523/JNEUROSCI.5317-05.2006
Rosenbaum DA, Jorgensen MJ (1992) Planning macroscopic aspects of manual control. Hum Mov Sci 11(1–2):61–69. doi:10.1016/0167-9457(92)90050-L
Rosenbaum DA, Marchak F, Barnes HJ, Vaughan J, Slotta JD, Jorgensen MJ (1990) Constraints for action selection: overhand versus underhand grips. In: Jeannerod M (ed) Attention and performance, Vol. XIII. Lawrence Erlbaum Associates, Hillsdale, pp 321–345
Rosenbaum DA, van Heugten CM, Caldwell GE (1996) From cognition to biomechanics and back: the end-state comfort effect and the middle-is-faster effect. Acta Psychol 94:59–85. doi:10.1016/0001-6918(95)00062-3
Rosenbaum DA, Chapman KM, Weigelt M, Weiss DJ, van der Wel R (2012) Cognition, action, and object manipulations. Psychol Bull 138(5):924–946. doi:10.1037/a0027839
Seegelke C, Hughes CM, Schütz C, Schack T (2012) Individual differences in motor planning during a multi-segment object manipulation task. Exp Brain Res 222(1–2):125–136. doi:10.1007/s00221-012-3203-8
Seegelke C, Hughes CM, Knoblauch A, Schack T (2013) Grasp posture planning during multi-segment object manipulation tasks—interaction between cognitive and biomechanical factors. Acta Psychol 144(3):513–521. doi:10.1016/j.actpsy.2013.09.002
Short MW, Cauraugh JH (1999) Precision hypothesis and the end-state comfort effect. Acta Psychol 100(3):243–252. doi:10.1016/S0001-6918(98)00020-1
Sülzenbrück S, Heuer H (2009) Functional independence of explicit and implicit motor adjustments. Conscious Cogn 18(1):145–159. doi:10.1016/j.concog.2008.12.001
Verwey WB, Shea CH, Wright DL (2015) A cognitive framework for explaining serial processing and sequence execution strategies. Psychon Bull Rev 22(1): 54–77. doi:10.3758/s13423-014-0773-4
Weigelt M, Rosenbaum DA, Huelshorst S, Schack T (2009) Moving and memorizing: motor planning modulates the recency effect in serial and free recall. Acta Psychol 132:68–79. doi:10.1016/j.actpsy.2009.06.005
Wunsch K, Henning A, Aschersleben G, Weigelt M (2013) A systematic review of the end-state comfort effect in normally developing children and in children with developmental disorders. J Motor Learn Dev 1(3):59–76
Acknowledgements
This work was funded by Grant HE 6710/2-1 of the German Research Foundation (DFG) granted to Oliver Herbort. We thank Albrecht Sebald and Georg Schüssler for technical support.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Ethical approval
All procedures performed in studies involving human participants were in accordance with the ethical standards of the institutional and/or national research committee and with the 1964 Helsinki declaration and its later amendments or comparable ethical standards.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
About this article

Cite this article
Mathew, H., Kunde, W. & Herbort, O. Inverting the planning gradient: adjustment of grasps to late segments of multi-step object manipulations. Exp Brain Res 235, 1397–1409 (2017). https://doi.org/10.1007/s00221-017-4892-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-017-4892-9