
Abstract
Growing evidence suggests that blind subjects outperform the sighted on certain tactile discrimination tasks depending on cutaneous inputs. The purpose of this study was to compare the performance of blind (n = 14) and sighted (n = 15) subjects in a haptic angle discrimination task, depending on both cutaneous and proprioceptive feedback. Subjects actively scanned their right index finger over pairs of two-dimensional (2-D) angles (standard 90°; comparison 91–103°), identifying the larger one. Two exploratory strategies were tested: arm straight or arm flexed at the elbow so that joint movement was, respectively, mainly proximal (shoulder) or distal (wrist, finger). The mean discrimination thresholds for the sighted subjects (vision occluded) were similar for both exploratory strategies (5.7 and 5.8°, respectively). Exploratory strategy likewise did not modify threshold in the blind subjects (proximal 4.3°; distal 4.9°), but thresholds were on average lower than for the sighted subjects. A between-group comparison indicated that blind subjects had significantly lower thresholds than did the sighted subjects, but only for the proximal condition. The superior performance of the blind subjects likely represents heightened sensitivity to haptic inputs in response to visual deprivation, which, in these subjects, occurred prior to 14 years of age.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
One of the most widely accepted claims concerning individuals with a sensory deficit is that they compensate by exhibiting exceptional skills when using the remaining intact senses. In the case of the blind, they have often been shown to manifest superior performance when carrying out specific tasks, such as verb generation, verbal memory, Braille reading, sound localization, and pitch discrimination (Lessard et al. 1998; Röder et al. 2001; Amedi et al. 2003; Gougoux et al. 2004, 2005; Voss et al. 2004).
However, it does not automatically follow that such findings can be generalized to all functions. In particular, contradictory results have been reported for blind subjects in relation to tactile acuity. Several studies reported that blind subjects are superior to sighted ones in discriminating the orientation of a grating applied to the fingertip (Van Boven et al. 2000; Goldreich and Kanics 2003). In contrast, Grant et al. (2000) found no differences in performance for the same task, as well as for two other tactile discrimination tasks (gratings with variable ridge widths; Braille-like dot patterns). Although the latter study found some evidence that blind subjects are better at discriminating Braille dot patterns, this advantage disappeared after the sighted subjects received additional practice in the task. Finally, Heller (1989) found no difference between blind and sighted subjects in a texture discrimination task. He also demonstrated that the absence of any difference could not be explained by the mode of touch, since similar results were obtained with both active and passive touch, i.e., with or without movement on the part of the subject.
Surprisingly, there is little information about the ability of blind subjects to appreciate object shape using haptic feedback, i.e., combined sensory feedback from both cutaneous and proprioceptive receptors (Gibson 1966). Early studies reported that the haptic estimation of macro-curvature is better in blind than sighted individuals (Hunter 1954; Pick and Pick 1966). Subsequently, however, Davidson (1972) demonstrated that the apparent superiority of the blind subjects could be explained by differences in the active exploratory strategies employed. He also demonstrated that performance levels in a curvature categorization task are comparable in blind and sighted subjects when they were required to use the same exploratory strategy.
The present study was designed to further characterize the performance of blind and sighted subjects in a haptic task, in this case discriminating differences in the shape of two-dimensional (2-D) angles across a range of 90–103°. This novel task was recently developed by Voisin et al. (2002a, b), and shown to be dependent on both cutaneous and proprioceptive feedback. Given that the task involved active exploration of the angles and that we wished to establish performance at the threshold level, we imposed a common search strategy to ensure that all subjects had identical information on which to base their sensory decisions. The basic strategy employed was a single to-and-fro contour following movement over the angles. This corresponds to the type of movement that subjects employ to obtain information about exact shape (Lederman and Klatzky 1987). One exploratory strategy, proximal, was identical to that used originally in developing the task so that the results could be compared to those obtained previously in young, healthy adults (Voisin et al. 2002a, 2005; Levy et al. 2007). Specifically, the angles were scanned with the right index finger of the outstretched arm. Thus, cutaneous feedback arose from the finger, and proprioceptive feedback from the shoulder. As described in Voisin et al. (2002a), this approach ensured that no incidental cues from contact between the arm and the trunk contributed to task performance. Subjects were also tested with a modified exploratory strategy, distal, with the elbow flexed at 90° and restrained against the trunk. This corresponded to the test position for complementary imaging experiments carried out in the same subjects; in this case, the proprioceptive feedback now arose mainly from the distal joints (wrist, finger).
Methods
Subjects
Seventeen sighted subjects served as controls (15 right-handed and 2 left-handed; aged from 22 to 50 years, mean 28.4 years; ten women, seven men). Handedness was assessed using the Edinburgh handedness inventory (Oldfield 1971). Sixteen legally blind subjects participated in the study (aged from 19 to 53 years, mean 36.3 years; 5 women, 11 men). Onset of blindness occurred relatively early in life: seven subjects were blind from birth (three with light perception), two became blind at 2 and 3 months, three at 3 years (one with light perception), and the others at 7, 8, 11, and 14 years. All were fluent Braille readers (three left-handed for Braille reading). In all cases, blindness was attributable to peripheral damage that led to total blindness in all but four subjects. The latter had some light perception (discrimination between night and day), but were unable to see the arm/hand movements during the angle explorations. All subjects were exempt of any other neurological problem. This study received prior approval by the Ethics and Research Committees of the Centre Hospitalier de l’Université de Montréal (Notre-Dame Hospital) and the Centre de Recherche Interdisciplinaire en Réadaptation (CRIR), which coordinates research and ethics with sensory and motor challenged individuals, and the Institut Nazareth et Louis Braille, which is the principal advocacy agency promoting the well-being of the blind in the Province of Québec. All subjects gave their informed consent prior to participation in the study.
2-D angles
The angles were constructed from 1 cm thick Plexiglas, and were formed by the intersection of two 8 cm long borders (Voisin et al. 2002a). A range of angles was employed, including a standard angle, 90°, and seven comparison angles spanning a range from 91 to 103° (increments of 2°). For one condition (distal, see below), the border length explored was decreased to 3 cm. This was delimited by plasticine markers placed just beyond the 3 cm point on either side of the intersection (Fig. 1b).

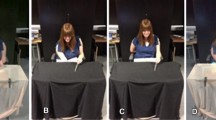
Position of the arm of the subject during haptic angle discrimination, relative to the angles (90° shown here). In the first condition (a, proximal), angles were explored with the arm out-stretched using the distal phalanx of the index finger for exploration. A single continuous to-and-fro movement was used to explore the angles, following the sequence abcba (digit shown in the start position a here). In the second condition (b, distal), the elbow was restrained. To restrict movement to the distal joints, the start and end positions (a, c) were closer to the intersection (3 vs. 8 cm for a). Exploration as for a
2-D angle discrimination task
Sighted subjects were blindfolded throughout the experiment. The task was similar to that described by Voisin et al. (2002a). In brief, subjects were seated in a chair with the experimental apparatus positioned directly in front of the shoulder (see Fig. 1). The experimenter adjusted the apparatus so that the angles, once inserted into the apparatus, were perpendicular to the subject’s arm. At the beginning of the session, each subject received verbal instructions indicating that they were going to explore pairs of 2-D angles and that their task would be to identify which angle of each pair was larger (a two-alternative forced-choice paradigm). The standard angle was either the first or second angle presented in each trial (order counterbalanced). Prior to each scan, the subjects were assisted to position their right finger on the angle so that the glabrous skin of the distal phalanx of the index finger (D2) contacted the angle during the scan (nail up). There was one difference from Voisin et al. (2002a): in the latter study, the orientation of the apparatus, and thus the angle, was randomly shifted for one angle of the pair presented in each trial (4 or 8° rotation, see Fig. 2 in Voisin et al. 2002a). No shift was applied here because we wanted to minimize the delay between successive scans (time required to remove the first angle, install the second angle, and then reposition the subject), with a view to using the task in complementary imaging studies. This approach was justified because threshold does not vary as a function of the presence or absence of a shift (Voisin et al. 2002a).
The general sequence of events in each condition was as follows: (1) the first angle was installed in the apparatus; (2) the experimenter guided the subject’s finger to the starting position (position a in Fig. 1); (3) the subject explored the first angle and then withdrew from the angle; (4) the second angle was installed in the apparatus and the exploration sequence was repeated (∼5 s delay between scans); and (5) the subject then verbally reported which angle was greater, and the experimenter recorded this response. As in previous experiments, no feedback on performance was given. Before starting data collection, the exploratory movement was described to the subject. This consisted of a single to-and-fro movement, following the sequence abcba (see Fig. 1). The subject made several scans to practice the movement; it was emphasized that the subject was not to stop anywhere during the exploration. The perceptual task was then described and practiced by having the subject scan a pair of angles with a large difference (90 and 103°). Data collection began after subjects made two correct discriminations (2–6 trials). For each condition, each of the seven comparison angles was presented 8× (56 trials total; pseudo-random order of presentation). No feedback on performance was provided to the subject. To minimize the subject’s fatigue, there was a short pause between each condition.
Two exploratory strategies were examined. In one condition (proximal, Fig. 1a), subjects kept their arm extended during scanning so that the movement occurred mainly at the shoulder. In this case, the angles were positioned so that they were located at the same height as the shoulder, and the spatial extent of the movement was 8 × 8 cm. This corresponds to the exploratory strategy used previously (Voisin et al. 2002a, 2005; Levy et al. 2007). In the other condition (distal, Fig. 1b), a Velcro strap was placed around the elbow, with the elbow flexed at approximately 90°, and the spatial extent of exploration was reduced to 3 × 3 cm so that the movement involved mainly the finger and wrist. This latter condition corresponded to the exploratory strategy used for complementary imaging experiments performed in the same subjects. The subjects had no independent knowledge of the angles used as these were hidden from view at all times.
Data analysis
The data analysis procedures used in the present study were similar to those described in Voisin et al. (2002a). For each subject and each condition, the proportion of correct responses (PC) for each comparison angle was fitted to the logistic function: PC = 1/(1 + ed(Comparison angle − Standard angle)) (see Fig. 2). The discrimination threshold, T (corresponding to 75% correct), was derived from the logistic function as follows: T = d −1ln 1/3, where d is the unique degree of freedom of the logistic curve that was adjusted to fit the raw data. Statistical analyses were carried out using the Mann–Whitney test to assess differences between the groups (sighted vs. blind) and the Wilcoxon test to compare across conditions (proximal vs. distal). The level of significance was fixed at P < 0.05.

Performance of one blind subject in the 2-D angle discrimination task in two conditions (proximal, distal scans). The proportion of correct responses is plotted as a function of the angular difference, Δ angle, between the comparison (91–103°) and standard angles (90°). Logistic curves were fitted to the data. Threshold corresponds to the value at which the logistic function crosses the horizontal interrupted line (75% correct)
Results
Data were collected in one experimental session from 16 blind and 17 sighted subjects. Four subjects, two from each group (including one of the light-sensitive blind subjects), were not able to discriminate the angles even for the largest differences and their results were not retained for the statistical analyses. The results of one subject (blind) are plotted in Fig. 2. Inspection indicates that the performance was very similar for the proximal and distal explorations. The two logistic functions are superimposed and discrimination threshold (half-way between chance, 50%, and perfect performance, see the dotted line) was 4.1° in each case.
Similar analyses were applied to the data from each subject and each condition. Figure 3a plots the logistic functions fitted to the pooled data, contrasting the results obtained in the blind and sighted subjects for proximal (left) and distal (right) explorations. Inspection indicates that the curves for the blind subjects were consistently shifted upwards, i.e., blind subjects more frequently identified the comparison angles as larger than did the sighted subjects. The corresponding mean discrimination thresholds are summarized in Fig. 3b. Two important observations can be made. First, within each group of subjects, performance did not change with the exploratory strategy. For sighted subjects, threshold values were similar for proximal (5.7 ± 0.5°, SEM; range 2.8–9.6°) and distal explorations (5.8 ± 0.4°; range 3.9–8.7°) (P = 0.691). For the blind subjects, discrimination thresholds were likewise not different for proximal (4.3 ± 0.5°; range 2.2–9.0°) and distal (4.9 ± 0.8°; range 1.6–13.6°) explorations (P = 0.198). Second, blind subjects had significantly lower thresholds for 2-D angle discrimination than did sighted subjects for the proximal explorations (P = 0.031). There was a trend for lower thresholds with the distal explorations, but the difference was not significant (P = 0.106), likely because the threshold estimates in the blind subjects showed increased inter subject variability in this condition (see the larger error bars; Fig. 3b, right).

a Comparison of the performance of blind (n = 14) and sighted subjects (n = 15) in the 2-D angle discrimination task for each exploratory strategy. Shown here are logistic functions fitted to the pooled data, with proportion of correct responses versus Δ angle. b Mean discrimination threshold (±SEM) in sighted (black) and blind subjects (striped) as a function of the exploratory strategy (proximal, distal). * P = 0.031
There was some evidence that discrimination threshold covaried with the age of onset of blindness. Although linear regression analyses (threshold vs. age of onset of blindness) were non-significant for both the proximal (P = 0.77) and distal (P = 0.64) exploratory strategies, the congenitally blind subjects (n = 7) but not the later blind subjects (n = 7) had significantly lower thresholds than the sighted subjects for the proximal explorations (P = 0.02 and P = 0.25, respectively). There was not, in contrast, any obvious difference in threshold between those subjects with light perception (n = 3) as compared to those without (n = 11): they had neither the lowest nor the highest threshold in either condition.
Could the subjects with residual light perception have used visual feedback to perform the tasks (blind subjects were not blind-folded during testing)? We examined their performance, reasoning that visual feedback should have improved performance when the angles were explored closer to the subject (distal condition). This suggestion was not supported by the results: two of these subjects had lower thresholds when the angles were further away, while the other subject had identical results in both conditions. These observations suggest that visual feedback was not a contributing factor to the results in the blind subjects.
Discussion
This study demonstrated that the performance of blind subjects is superior to that of sighted subjects in a haptic angle discrimination task, and this in a situation in which all subjects, blind and sighted, used the same exploratory strategy, and thus had identical information on which to base their responses.
Present results
To the best of our knowledge, this is the first demonstration of hyperacuity for blind subjects in a controlled haptic task. This task has been shown to be dependent on cutaneous feedback from the exploring digit, and proprioceptive feedback from the muscles and joints engaged in the exploration (Voisin et al. 2002b). As suggested previously, the cutaneous feedback is likely mediated by cutaneous mechanoreceptors with small receptive fields [slowly adapting type I and rapidly adapting (Johnson 2001)], while the proprioceptive feedback likely originates from muscle spindles (Voisin et al. 2002b; Levy et al. 2007).
Our findings complement previous studies (Van Boven et al. 2000; Goldreich and Kanics 2003) that have shown superior performance for blind subjects in tasks limited to discriminative touch, that is, dependent only on cutaneous inputs. We found that blind subjects were superior to sighted subjects, at least for the range of angles tested, but the difference was only significant for the proximal condition (movement of the whole arm) and not the distal condition (movement of the wrist and finger). Moreover, congenitally blind subjects particularly contributed to the significantly lower thresholds in the proximal condition, an observation consistent with the report of Grant et al. (2000) that early blind subjects (<5 years of age) performed better in a tactile hyperacuity task using Braille-like dot patterns than did late blind subjects (onset of blindness, >10 years of age).
Two factors may have contributed to the differential results with proximal and distal exploratory strategies when comparing the blind and sighted subjects. The superior performance with proximal movements in the blind subjects might reflect increased use of such movements. All of our blind subjects were fluent Braille readers, and Braille reading typically involves movement of the whole arm, particularly rotation at the shoulder (elbow flexed), as the finger (or fingers for subjects reading with both hands) is scanned over the lines of text. Even in other activities, for example using a white cane to navigate, blind subjects may be particularly relying on whole arm movements as the cane is moved to probe the surrounding environment. Such a strategy would probably simplify the interpretation of sensory feedback generated at the tip of the cane. Second, the absence of any difference in performance for the distal movements, blind versus sighted, might be explained by the Velcro restraint at the elbow. This did not eliminate shoulder rotation, but may have been an unintended secondary source of noise during the task. Consistent with this suggestion, the blind subjects as a group, but not the sighted, showed increased inter subject variability in the constrained condition (Fig. 3b). This suggestion is, moreover, consistent with the results of Gentaz and Hatwell (1996) who also reported decrements in the performance of a haptic task when the arm was partly supported (vs. no support).
Considerations
There were several differences in the experimental conditions used in the studies by Voisin et al. (2002a, b) and the present one, changes that were dictated by the fact that this same task was to be used in imaging studies, and in the same subjects. Thus, the position of the angles relative to the subject was slightly modified (directly in front of the subject here vs. 30° to the right). This is unlikely to have contributed to the results since performance in a related task, angle categorization, is invariant across this range (unpublished observations, G. Michaud, J. Voisin and C. E. Chapman). The exploratory strategy was also modified by including the distal condition (elbow restrained, length of the arms of the angles shortened), but this had minimal effects on performance since neither group of subjects showed a significant change (distal vs. proximal). Despite these small changes, mean threshold, 5.7° for the sighted subjects, was similar to that reported by Voisin et al. (4.7°).
The absence of any difference, proximal versus distal exploration, may appear surprising since there is some evidence that gravitational cues can modify haptic perception. In particular, Gentaz and Hatwell (1996) reported that subjects show increased errors in the haptic perception of bar orientation in the frontal plane when the arm is partly supported, i.e., as in our distal condition. Differences in the design of the task (exploring and then reproducing the orientation of a rod versus serial exploration and comparison of pairs of angles) likely contributed to the difference. The present observation of no difference (proximal, distal) confirmed, and extended, the observation of Voisin et al. (2005) that thresholds are unchanged when subjects explore angles using different motor strategies (shoulder vs. wrist in their case). Thus, the results provide further evidence in favor of their suggestion that there is an invariant central representation of object shape, independent of the joints used in the exploration of objects.
The task itself involved working memory, as the mental representation of the first angle scanned needed to be temporarily stored, and compared to that of the second angle scanned. In this study, the delay between scanning the first and second angle was ∼5 s. While we do not know whether reducing the time delay would improve performance, we do know that when angles are explored at a position close to the midline (as in this study), then tripling the delay from 5 to 15 s has no effect on angle discrimination (Voisin et al. 2005). Moreover, allowing more time between scans can, under certain conditions, improve performance. For example, the elevated thresholds seen when angles are explored at a more eccentric location (far right, 60° to the right of midline), decline down to levels seen with the angles located more centrally when the delay is lengthened from 5 to 15 s. Together, we suggest that performance may well be optimal with the ∼5 s delay used here.
Finally, one limitation of the study was that we chose, arbitrarily, to perform all testing on the right side, independent of whether the subject was right or left hand dominant. There were approximately equal numbers of left-handed subjects in each group (3/14 for the blind subjects, and 2/15 for the sighted), but too few left-handed subjects to perform any statistical comparisons. No consistent trend was seen, i.e., left-handed subjects were sometimes better and sometimes worse than the average. More importantly, the difference (blind vs. sighted) was preserved even when the left-handed subjects were excluded from the analysis (proximal, P = 0.004; distal, P = 0.111).
Haptic perception in blind subjects
It was not surprising to find enhanced performance for blind subjects in a haptic angle discrimination task since blind subjects must depend more on haptic feedback during their daily activities than do sighted subjects. Thus, it is interesting to speculate that the present results reflect, at least in part, experience-driven changes in brain processing of haptic inputs. In addition, however, blind subjects adapt to their condition by optimizing their exploratory strategies. Thus, Davidson (1972) found that in a task in which subjects had to categorize macro-curvatures as straight, concave, or convex, blind subjects were particularly adept at both identifying the salient feature to discriminate, and choosing the optimal exploratory strategy to maximize sensory feedback from this feature. Thus, experience-driven adaptations can have far reaching consequences.
We tried to minimize the variability between blind subjects by restricting recruitment to subjects who had lost their vision before puberty. It has been shown that cross-modal plasticity (activation of occipital areas during Braille reading) is present in the blind when blindness occurs before 14 years of age (Cohen et al. 1999). More recently, Sadato et al. (2002) found that the critical age is slightly later, at 16 years of age, for showing cross-modal plasticity in primary visual cortex in relation to a passive tactile discrimination task of 2-D spatial form discrimination (Braille character identification). As exploring 2-D angles is a sensorimotor task somewhat similar to the Braille task used by Cohen et al., we chose 14 years as the cut-off point to recruit the blind subjects.
Complementary experiments are needed, using neuroimaging techniques, to determine whether the cerebral networks involved in the haptic angle discrimination task are similar in blind and sighted subjects. Indeed, occipital activations have been reported in the blind (Kujala et al. 2000; Gizewski et al. 2003; Lambert et al. 2004; Burton and McLaren 2006; Burton et al. 2004, 2006; Pascual-Leone et al. 2005; Sadato 2005; Sathian 2005; Ofan and Zohary 2006), and there is evidence that these activations are functionally relevant (Hamilton et al. 2000). Correlations between performance in various tasks and visual cortex activation have also been reported (Amedi et al. 2003; Gougoux et al. 2005). Questions remain, however, about the haptic appreciation of object shape (discrimination of 2-D angles). Although it is known that haptic shape exploration is associated with activation in extrastriate visual areas in sighted subjects, possibly reflecting visual imagery and/or other mechanisms related to somatosensory object recognition leading then to multisensory processing in these areas (Amedi et al. 2001; James et al. 2002; Zhang et al. 2004; Peltier et al. 2007), it is not known if blind subjects might show specific occipital activations during the performance of this task. Indeed, our finding that congenitally blind subjects (lacking visual experience) particularly contributed to the enhanced performance of blind subjects during 2-D angle discrimination makes it unlikely that visual imagery per se contributed significantly to the performance of the blind subjects.
References
Amedi A, Malach R, Hendler T, Peled S, Zohary E (2001) Visuo-haptic object-related activation in the ventral visual pathway. Nat Neurosci 4:324–330
Amedi A, Raz N, Pianka P, Malach R, Zohary E (2003) Early visual cortex activation correlates with superior verbal memory performance in the blind. Nat Neurosci 6:758–766
Burton H, McLaren DG (2006) Visual cortex activation in late-onset, Braille naïve blind individuals: an fMRI study during semantic and phonological tasks with heard words. Neurosci Lett 392:38–42
Burton H, Sinclair RJ, McLaren DG (2004) Cortical activity to vibrotactile stimulation: an fMRI study in blind and sighted individuals. Hum Brain Mapp 23:210–228
Burton H, McLaren DG, Sinclair RJ (2006) Reading embossed capital letters: an fMRI study in blind and sighted individuals. Hum Brain Mapp 27:325–339
Cohen LG, Weeks RA, Sadato N, Celnik P, Ishii K, Hallet M (1999) Period of susceptibility for cross-modal plasticity in the blind. Ann Neurol 45:451–460
Davidson PW (1972) Haptic judgements of curvature by blind and sighted humans. J Exp Psychol 93:43–55
Gentaz E, Hatwell Y (1996) Role of gravitational cues in the haptic perception of orientation. Percept Psychophys 58:1278–1292
Gibson JJ (1966) The senses considered as perceptual systems. Houghton Mifflin Co, Boston
Gizewski ER, Gasser T, de Greiff A, Boehm A, Forsting M (2003) Cross-modal plasticity for sensory and motor activation patterns in blind subjects. Neuroimage 19:968–975
Goldreich G, Kanics M (2003) Tactile acuity is enhanced in blindness. J Neurosci 23:3439–3445
Gougoux F, Lepore F, Lassonde M, Voss P, Zatorre RJ, Belin P (2004) Pitch discrimination in the early blind. Nature 430:309
Gougoux F, Zatorre RJ, Lassonde M, Voss P, Lepore F (2005) A functional neuroimaging study of sound localization: visual cortex activity predicts performance in early-blind individuals. PLoS Biol 3:324–333
Grant AC, Thiagarajah MC, Sathian K (2000) Tactile perception in blind Braille readers: a psychophysical study of acuity and hyperacuity using gratings and dot patterns. Percept Psychophys 62:301–312
Hamilton R, Keenan JP, Catala M, Pascual-Leone A (2000) Alexia for Braille following bilateral occipital stroke in early blind woman. Neuroreport 11:237–240
Heller MA (1989) Texture perception in sighted and blind observers. Percept Psychophys 45:49–54
Hunter IML (1954) Tactile-kinesthetic perception of straightness in blind and sighted humans. Q J Exp Psychol 6:149–154
James TW, Humphrey GK, Gati JS, Servos P, Menon RS, Goodale MA (2002) Haptic study of three-dimensional objects activates extrastriate visual areas. Neuropsychologia 40:1706–1714
Johnson KO (2001) The roles and functions of cutaneous mechanoreceptors. Curr Opin Neurobiol 11:455–461
Kujala T, Alho K, Näätänen R (2000) Cross-modal reorganization of human cortical functions. Trends Neurosci 23:115–119
Lambert S, Sampaio E, Mauss Y, Scheiber C (2004) Blindness and brain plasticity: contribution of mental imagery? An fMRI study. Brain Res Cogn Brain Res 20:1–11
Lederman SJ, Klatzky RL (1987) Hand movements: a window into haptic object recognition. Cogn Psychol 19:342–368
Lessard N, Paré M, Lepore F, Lassonde M (1998) Early-blind human subjects localize sound sources better than sighted subjects. Nature 395:278–280
Levy M, Bourgeon S, Chapman CE (2007) Haptic discrimination of two-dimensional angles: influence of exploratory strategy. Exp Brain Res 178:240–251
Ofan RH, Zohary E (2006) Visual cortex activation in bilingual blind individuals during use of native and second language. Cereb Cortex 17(6):1249–1259. doi:10.1093/cercor/bhl039
Oldfield RC (1971) The assessment and analysis of handedness: the Edinburgh inventory. Neuropsychologia 9:97–113
Pascual-Leone A, Amedi A, Fregni F, Merabet LB (2005) The plastic human brain cortex. Annu Rev Neurosci 28:377–401
Peltier S, Stilla R, Mariola E, Laconte S, Hu X, Sathian K (2007) Activity and effective connectivity of parietal and occipital cortical regions during haptic shape perception. Neuropsychologia 45:476–483
Pick AD, Pick HL (1966) A developmental study of tactile discrimination in blind and sighted children and adults. Psychon Sci 6:367–368
Röder B, Rosler F, Neville HJ (2001) Auditory memory in congenitally blind adults: a behavioural–electrophysiological investigation. Brain Res Cogn Brain Res 11:289–303
Sadato N (2005) How the blind “see” Braille: lessons from functional magnetic resonance imaging. Neuroscientist 11:577–582
Sadato N, Okada T, Honda M, Yonekura Y (2002) Critical period for cross-modal plasticity in blind humans: a functional MRI study. Neuroimage 16:389–400
Sathian K (2005) Visual cortical activity during tactile perception in the sighted and the visually deprived. Dev Psychobiol 46:279–286
Van Boven RW, Hamilton RH, Kauffman T, Keenan JP, Pascual-Leone A (2000) Tactile spatial resolution in blind Braille readers. Neurology 54:2230–2236
Voisin J, Benoit G, Chapman CE (2002a) Haptic discrimination of object shape in humans: two-dimensional angle discrimination. Exp Brain Res 145:239–250
Voisin J, Lamarre Y, Chapman CE (2002b) Haptic discrimination of object shape in humans: contribution of cutaneous and proprioceptive input. Exp Brain Res 145:251–260
Voisin J, Michaud G, Chapman CE (2005) Haptic shape discrimination in humans: insight into the haptic frames of reference. Exp Brain Res 164:347–356
Voss P, Lassonde M, Gougoux F, Fortin M, Guillemot JP, Lepore F (2004) Early- and late-onset blind individuals show supra-normal auditory abilities in far-space. Curr Biol 14:1734–1738
Zhang M, Weisser WD, Stilla R, Prather SC, Sathian K (2004) Multisensory cortical processing of object shape and its relation to mental imagery. Cogn Affect Behav Neurosci 4:251–259
Acknowledgments
This project was supported by the Canadian Institutes of Health Research and the Canada Research Chairs program for FL, and the Centre de Recherche en Sciences Neurologiques postdoctoral fellowship for FA. The authors thank Marie-Thérèse Parent for technical assistance with the illustrations.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Alary, F., Goldstein, R., Duquette, M. et al. Tactile acuity in the blind: a psychophysical study using a two-dimensional angle discrimination task. Exp Brain Res 187, 587–594 (2008). https://doi.org/10.1007/s00221-008-1327-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-008-1327-7