
Abstract
The International Laser Ranging Service (ILRS) was established by the International Association of Geodesy (IAG) in 1998 to support programs in geodesy, geophysics, fundamental constants and lunar research, and to provide the International Earth Rotation Service with data products that are essential to the maintenance and improvement in the International Terrestrial Reference Frame (ITRF), the basis for metric measurements of changes in the Earth and Earth–Moon system. Other scientific products derived from laser ranging include precise geocentric positions and motions of ground stations, satellite orbits, components of Earth’s gravity field and their temporal variations, Earth Orientation Parameters, precise lunar ephemerides and information about the internal structure of the Moon. Laser ranging systems are already measuring the one-way distance to remote optical receivers in space and are performing very accurate time transfer between remote sites in the Earth and in Space. The ILRS works closely with the IAG’s Global Geodetic Observing System. The ILRS develops (1) the standards and specifications necessary for product consistency, and (2) the priorities and tracking strategies required to maximize network efficiency. The service collects, merges, analyzes, archives and distributes satellite and lunar laser ranging data to satisfy a variety of scientific, engineering, and operational needs and encourages the application of new technologies to enhance the quality, quantity, and cost effectiveness of its data products. The ILRS works with (1) new satellite missions in the design and building of retroreflector targets to maximize data quality and quantity, and (2) science programs to optimize scientific data yield. Since its inception, the ILRS has grown to include forty laser ranging stations distributed around the world. The ILRS stations track more than ninety satellites from low Earth orbit (LEO) to the geosynchronous orbit altitude as well as retroreflector arrays on the surface of the Moon. Applications have been expanded to include time transfer, asynchronous ranging for targets at extended ranges, free space quantum telecommunications, and the tracking of space debris. Laser ranging technology is moving to lower energy, higher repetition rates (kHz), single-photon-sensitive detectors, shorter pulse widths, shorter normal point intervals for faster data acquisition, and increased pass interleaving, automated to autonomous operation with remote access, and embedded software for real-time updates and decision making. An example of pass interleaving is presented for the Yarragadee station (see Fig. 4); tracking of LEO satellites is often accommodated during break in LEO and GNSS passes. New satellites arrays provide more compact targets and work continues on the development of lighter less expensive arrays for satellites and the moon. The service now provides operational ITRF products including daily/weekly station positions and daily resolution Earth orientation products; the flow of weekly combination of satellite orbit files for LAGEOS/Etalon-1 and -2 has recently been established. New products are under testing through a pilot project on systematic error monitoring currently underway. The article will give an overview of activities underway within the service, paths forward presently envisioned, and current issues and challenges.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Satellite laser ranging (SLR) and lunar laser ranging (LLR) are basic space tools for making accurate measurements for applications in geodesy, geophysics, lunar science, and fundamental physics. Scientific products derived using SLR and LLR data include: Earth orientation parameters (polar motion and length of day), station coordinates and velocities, time-varying geocenter coordinates, static and time-varying coefficients of the Earth’s gravity field, centimeter accuracy satellite ephemerides, fundamental physical constants, and lunar ephemerides, librations, and orientation parameters.
Even in an era of highly detailed monitoring of mass transport provided by the Gravity Recovery and Climate Experiment (GRACE), SLR plays an essential role in such monitoring by providing estimates of the geocenter and by contributing to the determination of a long-time series for the second-degree gravitational harmonic, C20 (e.g., Ries 2016; Bloßfeld et al. 2015; Cheng et al. 2013). Geocenter is not observable in GRACE data, and the C20 determined from GRACE data must be replaced with an independent SLR-based determination due to the poor observability with GRACE K Band Range Rate data and aliasing with the S2 tidal harmonic. Omitting the degree, one component of mass transport would provide an incomplete picture of long wavelength mass variation as one mm of geocenter displacement in Z maps to 190 gigatons of mass change in the global ocean, and 69 gigatons in Antarctica (Wu et al. 2012).
SLR—along with Very Long Baseline Interferometry (VLBI), Global Navigation Systems (GNSS) and Doppler Orbit determination and Radiopositioning Integrated on Satellite (DORIS)—are the fundamental tools for the maintenance and improvement in the International Terrestrial Reference Frame (ITRF), which is the basis for our metric monitoring of global change in the Earth system (Beutler and Rummel 2012). LLR provides vital data to model lunar orientation and solar system ephemerides, to constrain models of the lunar interior in combination with other information, to carry out tests of general relativity and in fundamental physics, and to provide complementary information on Earth precession and Earth rotation (Williams et al. 2012; Murphy 2013).
A critical aspect of SLR is the synergy with other geodetic techniques. With GNSS, SLR plays an important role in verifying orbit performance, tuning GNSS offsets and antenna phase maps, and improving GNSS satellite solar radiation pressure models (e.g., van den Ijssel et al. 2015; Steigenberger and Montenbruck 2017; Sosnica et al. 2018; Arnold et al. 2018). With DORIS, SLR provides the data for precise orbit determination of altimeter satellites (e.g., Lemoine et al. 2010; Zelensky et al. 2016; Schrama 2018). An important property of SLR is that, at high elevations over the ground station (above 60–70°), the range observation provides a direct measure of the radial orbit error, e.g., Schutz and Tapley (1980); Tapley et al. (1994). This property is an important tool to monitor both the radial orbit accuracy and radial orbit stability of satellite orbits determined with SLR or by other geodetic techniques (e.g., Couhert et al. 2015).
1.1 What is laser ranging?
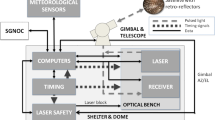
Modern space geodesy data products require accurate measurements of the distance between reference stations on the surface of the Earth and fixed reference points on orbiting satellites and the Moon. SLR and LLR use short pulse lasers and state-of-the-art optical receivers and timing systems to measure the time-of-flight from ground stations to optical retroreflector arrays on Earth-orbiting satellites and the surface of the Moon. The measurement is derived through conversion of the time-of-flight to one-way range, corrected for atmospheric refraction and, in the case of satellites, the offset between the reflector and the spacecraft center of mass (reference point for the satellite dynamics) (see Fig. 1).

Simple schematic of a laser ranging system
1.2 A brief history
The technique was first demonstrated at NASA Goddard Space Flight Center (GSFC) in November 1964 on the Beacon-B satellite with a Q-switched ruby laser (Plotkin et al. 1965). Activities expanded over the next decade as the international network grew through participation by the National Aeronautics and Space Agency (NASA), the Smithsonian Astrophysical Observatory (SAO), and the Centre National d’Études Spatiales (CNES). The satellite complement grew with the launch of Beacon-C, Geos-1 and -2, Diademe-1 and -2. Satellite laser ranging, then at the accuracy level of a meter, focused on refining the size and shape of the Earth (fiducial stations and gravity field) and improved orbit determination.
The Williamstown Conference in 1969 (Kaula 1970), supported by NASA with participation from many international scientists, was organized to “explore the possible contributions of accurate position, velocity, and acceleration measurements to the solution of problems in solid-earth and ocean physics”; the workshop identified SLR as an important tool, and recommended that it be brought to a measurement accuracy of 2 cm.
Starlette and LAGEOS, launched in 1975 and in 1976, respectively, were the first retroreflector satellites launched to support measurements of Earth dynamics (Smith et al. 1990; Schutz et al. 1993). By that time, SLR had reached the 10-cm capability and early experiments were undertaken to measure polar motion with Beacon-C (Smith et al. 1972) and motion along the San Andreas fault through the SAFE (San Andreas Fault Experiment) with LAGEOS (Christodoulidis et al. 1985). The first big international SLR program to measure motions was the WEGENER (Working Group of European Geoscientists for the Establishment of Networks for Earth-science Research) Program, using mobile SLR systems provided by Germany, the Netherlands, and NASA to occupy sites in Greece, Turkey, and Italy, augmented by fixed SLR systems in France, Germany, UK, Italy, and other countries in Europe, to provide an early map of the crustal motions around the Mediterranean region (Wilson and Reinhart 1993).
Although station positions could be measured at sub-cm levels by the early 1990’s, the emergence of GPS made it apparent that mobile SLR systems were not economical and the role of SLR should be focused on the stable reference frame, global properties of the Earth and Earth–Moon system, and precision orbit determination. New operating SLR stations in Australia, China, Russia, Finland, and Spain expanded the network. New missions were looking to SLR for strengthened orbit determination and backup to other onboard instrumentation (e.g., GPS). By 2015, with the expansion of the GNSS constellations, the SLR network tracking load had increased to nearly 100 satellites.
Ranging accuracy, which started out at meter accuracies using ruby lasers with several nsec-wide pulse widths, evolved into Q-switched Nd:YAG (neodymium-doped yttrium aluminum garnet, ND:Y3Al5O12) lasers, then mode-locked Nd:YAG lasers, and currently into mode-locked Nd:YAG lasers operating at kHz rates with ps-wide pulse widths (Plotkin et al. 1965; Fitzmaurice 1978; Degnan 1985, 1994; Kirchner et al. 2009; McGarry et al. 2013).
The SLR community now supports a suite of passive geodetic satellites, altimeter and other LEO satellites, the GNSS constellations, satellites in the geosynchronous orbits, and targets at the Moon. The purposes of these missions include Earth center of mass and scale (GM), gravity field, tectonic plate motion, ocean and climate, cryosphere, remote sensing, technology development, geomagnetic fields, global digital elevation and SAR, and navigation. The data products provided include precision orbit determination, Earth rotation, accurate station positions and velocities, instrument validation, satellite dynamics, and time transfer. Tracking continues on some satellites that are no longer mission-active to study the orbit of mission debris and help predict trajectories of reentry.
1.3 Role of SLR in the space geodesy systems
SLR is the only space geodesy technique that operates in the optical region of the electromagnetic spectrum, reducing its susceptibility to range biases due to atmospheric refraction. In addition, SLR ranging is unaffected by transit through the Earth’s ionosphere, whereas longer wavelength techniques such as VLBI and GNSS must account for ionosphere refraction. SLR measures and provides the total round-trip range to the target satellite whereas the other satellite techniques effectively measure range differences over a count interval (in the case of DORIS Doppler) or provide one-way pseudorange and carrier phase measurements in the case of GNSS (Seeber 2003). SLR’s major shortcomings include its inability to penetrate clouds and an initial capital cost.
As measured in the quarterly performance reports for the ILRS network for 2017, more than half of the ILRS stations provide data whose normal point precision ranges from 2.5 to 15 mm for LAGEOS, and 2.5 to 12 mm for a more compact target such as Starlette (e.g., see https://ilrs.gsfc.nasa.gov/network/system_performance/global_report_cards/perf_2017q4_wLLR.html). SLR provides cm level orbital accuracy and brings a unique ability to detect small changes through the analysis of long-term stable time series of data. Laser ranging stations operate in both day and night time and the data are available to the user in near real-time through the ILRS data centers (Noll et al. 2018).
The space segment is a totally passive retroreflector array that supports long-term data histories. For example, SLR data from LAGEOS-1 are available at the NASA Crystal Dynamics Data Information System (CDDIS) from 1976 onward, Starlette and Ajisai data are available beginning in 1977 and 1986, respectively, and data for LAGEOS-2 are available since 1992. Other satellites such as LEO altimeter spacecraft are usually tracked throughout the satellites’ operational lifetimes, for example 1992–2006 for TOPEX/Poseidon, and 2002–2012 for Envisat (Noll 2010; Noll et al. 2018).
An additional advantage accrues to SLR from the ability to precisely measure the tracking reference point compared to the other satellite techniques. This is valuable for the determination of site ties for the Terrestrial Reference Frame (TRF). For SLR, the ranging point of origin (also referred to as the “invariant point”) is located at the intersection of the azimuth, elevation, and collimation axes of the telescope. While the invariant point may not be directly observable in local site surveys, its location can be deduced from geometry and symmetry calculations or by indirect determination through observation of targets mounted on the telescope as it is rotated in different orientations (Sarti et al. 2004; Dawson et al. 2007). In contrast, for DORIS and GNSS, the tracking point or electronic phase center is realized virtually and varies with both azimuth and elevation, as well as with the characteristics of the antenna (e.g., Schmid and Rothacher 2003; Schmid et al. 2016; Tourain et al. 2016).
1.4 Principle of satellite laser ranging
The fundamental observable in satellite laser ranging is the measurement of the round-trip flight time of a laser pulse emitted by a laser transmitter, reflected at the satellite, and received at the satellite laser ranging station. Following Seeber (2003) and Beutler (2005), the SLR range equation can be written in simplified form as follows:
where t is the time of emission of the laser pulse from the satellite laser ranging station, c is the speed of light in vacuum, \( \overrightarrow {R } \left( t \right) \) is the position of the SLR station at time t, \( \vec{r} \left( t \right) \) is the position of the satellite center of mass, \( \Delta t_{1} \) is the propagation time up to the satellite from the SLR station, \( \Delta t_{2} \) is the propagation time from the satellite back to the SLR station, \( \delta_{\text{TROP}} \) is the troposphere refraction correction, \( \delta_{\text{REL}} \) is the relativistic correction due to space curvature (the Shapiro correction), \( \delta_{\text{SYS}} \) is the system delay in the ground system, \( \varepsilon_{\uptau} \) is the error in the epoch time measurement, and \( \eta_{\text{R}} \) includes the residual range errors in the ranging system.
The propagation times, \( \Delta t_{1} \) and \( \Delta t_{2} \), are determined using an iterative procedure (e.g., Montenbruck and Gill 2001). The troposphere refraction correction for SLR data is computed using in situ meteorological data, and a troposphere refraction model suitable for the optical wavelengths (Mendes and Pavlis 2004), although ray-tracing can also be used (e.g., Hulley et al. 2007). The system delay, \( \delta_{\text{SYS}} \), is determined through ground calibration, either by routine ranging to a set of ground targets, or through internal calibrations within the laser ranging system. The residual range errors, \( \eta_{\text{R}} , \) can include any omitted system delays (e.g., optical or electrical), or uncertainties in specifying the correction from the SLR reflection point to the SLR reference point on the satellite.
The SLR stations provide data at pulse repetition rates of between 10 Hz (the stations of current NASA network) to kHz rates for some stations (e.g., Herstmonceux, Graz, Potsdam). The raw data are aggregated into normal points as discussed by Sinclair (1997). The purpose of forming normal points is to detect and eliminate blunders and reduce the amount of data for subsequent processing. Since the observations within a tracking pass are correlated, a compressed observation provides sufficient information to model satellite dynamics for precise orbit determination. Nonetheless, the high-rate data are still useful for studies of satellite attitude dynamics, in refining center of mass corrections for geodetic satellites and for other studies. It is now ILRS policy that stations should submit both normal point data and full-rate data to the ILRS data centers for the satellites that they track.
2 Overview of the ILRS
The mission of the International Laser Ranging Service (ILRS) is to coordinate satellite laser ranging measurements through network operations, data archive and access, interactions with mission contacts, technique development, data analysis, and scientific interpretation. The global satellite and lunar laser ranging data and their derived products support geodetic and geophysical research activities important to the maintenance of an accurate Terrestrial Reference Frame. Furthermore, these data are of sufficient accuracy to satisfy the objectives of a wide range of scientific, engineering, and operational applications and experimentation.
The ILRS is a voluntary organization made up of contributors from over 75 organizations in 30 countries. The ILRS, like its sister organizations within the International Association of Geodesy (IAG), the International GNSS Service (IGS) (Dow et al. 2009), the International VLBI Service for Geodesy and Astrometry (IVS) (Schuh and Behrend 2012), and the International DORIS Service (IDS) (Willis et al. 2010), operate under a model of community management; they develop standards, monitor performance throughout the organization, and define and deliver data and data products on an operational basis. The services are guided by a Terms of Reference which details the vision, objectives, structure, and operation, and specifies the data and products provided by the service to ensure consistency over time. This cooperation of the many international organizations over the years has led to a very successful model; the individual contributing organizations are able to leverage their respective limited resources to all levels of service operation. The services also contribute to the activities of the International Earth Rotation and Reference Systems Service (IERS) for the realization and maintenance of the International Terrestrial Reference Frame (ITRF) (Altamimi et al. 2016).
2.1 Establishing the service
The IAG established the ILRS as one of its official services in July 1999. Before that date, international cooperation in SLR activities took place within satellite and lunar laser ranging (SLR/LLR) sub-commission of the International Coordination of Space Techniques for Geodesy and Geodynamics (CSTG) (Pearlman et al. 2002). The sub-commission facilitated information exchange and cooperation in many areas of SLR activities, e.g., tracking campaigns, distribution of laser ranging data and information, and advances in technology. However, generation of consistent end products for the general user community and international organizations such as the IERS had not been performed on a routine basis. Therefore, the CSTG and the IAG recommended following in the footsteps of the Global Positioning System (GPS) community, who had established the International GPS Service (IGS, now the International GNSS Service) in 1992, and created an international organization under the IAG for laser ranging activities. A draft Terms of Reference for the International Laser Ranging Service was accepted by the CSTG in 1997. A Call for Participation in the ILRS was issued in January 1998. The CSTG reviewed and approved those responses received for the various components of the ILRS and in mid-1999 the IAG approved the official launch of the ILRS as an international IAG service supporting global scientific laser ranging activities.
2.2 ILRS organization
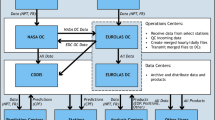
The ILRS organization, shown in Fig. 2, consists of “operational” components required to achieve the goals of the service: Observing Stations, Operations Centers, Data Centers, Analysis Centers, a Central Bureau, and a Governing Board. Participating organizations collaborate at all levels within the service to ensure efficient operations and consistent and timely delivery of data and derived products to a global user community.

The official components of the ILRS showing their internal and external interactions
Observing stations The stations approved as part of the ILRS network are authorized to range to the satellites on the current priority list. Stations must follow established guidelines for ranging to these satellites as well as other operational requirements in system configuration, laser safety, data transmission, among others. Data must meet accuracy, quantity, and timeliness requirements. The network is organized into three regional subnetworks: National Aeronautics and Space Administration (NASA), EUROpean LASer Network (EUROLAS), and the Western Pacific Laser Tracking Network (WPLTN); these subnetworks coordinate observations with their stations where practical and appropriate.
Operations Centers (OCs) OCs, located at the EUROLAS Data Center (EDC) in Germany and NASA in the USA, interface with the ILRS subnetworks/stations to collect SLR data, both normal point and full-rate, and provide high-level quality control on submitted data in standard formats. Stations transmit their data on a sub-daily basis (ideally) to the OCs; these data are then merged into hourly and daily files and forwarded to Data Centers for archive.
Data Centers (DCs) OCs forward data and analysis centers submit their derived products to the DCs. DCs then provide a publicly accessible archive of laser ranging data and official ILRS products derived from these data. The two ILRS data centers at EDC and the Crustal Dynamics Data Information System (CDDIS) are considered the primary access point for the global user community to laser ranging data and official ILRS products.
Analysis Centers (ACs) SLR and LLR Analysis Centers (ACs) and Associate Analysis Centers (AACs) utilize the SLR data to generate ILRS derived products on an operational basis, typically daily or weekly depending on the product, using accepted standards. These official ILRS products include positions and velocities of ILRS network stations, Earth Orientation Parameters (EOPs), and precise orbits for selected satellites (LAGEOS and Etalon). AACs generate specialized products, such as station data quality reports. A list of currently approved ILRS ACs and AACs is maintained on the ILRS Web site at: https://ilrs.gsfc.nasa.gov/science/analysisCenters/index.html and listed in Tables 1 and 2.
Central Bureau (CB) The ILRS CB is responsible for the coordination and management of ILRS activities and for the communication with service components and the outside community. The CB establishes operating standards for its components and promotes compliance with these standards. The CB monitors network operations, coordinates satellite tracking, maintains the list of satellites tracked and their priorities, maintains the ILRS Web site and associated documentation, generates reports on data production and station data quality, and organizes workshops (both the bi-annual International Workshop on Laser Ranging and ILRS Technical Workshops). The ILRS CB is managed by NASA Goddard Space Flight Center and meets typically every month to address current issues and monitor operations throughout the service.
Governing Board (GB) The eighteen-member ILRS GB defines official ILRS policy and is responsible for the direction of the service. The GB provides final approval for official ILRS products, additions to the satellite tracking list, and approves new standards and procedures proposed by components within the ILRS. The chair of the GB maintains contact with other services and organizations. The GB membership consists of representatives from the ILRS components as well as representatives from external organizations, namely the president (or delegate) of IAG Commission 1 (Reference Systems) and from the IERS. Likewise, the GB appoints ILRS representatives to external bodies: an analysis and LLR representative to the IERS Directing Board and a representative to the Global Geodetic Observing System (GGOS) Consortium.
The ILRS has established Standing Committees (SCs, formerly Working Groups) to focus on specific areas of the service, providing focused technical expertise and recommendations to the Central Bureau and Governing Board on policy, procedures, and future direction. The current ILRS SCs are:
Analysis SC Develops, maintains, and coordinates the submission of the suite of standard ILRS products; provides feedback on the performance of the ILRS network.
Data formats and procedures SC Develops, maintains, and reviews standard procedures for generation and reporting of SLR data.
Missions SC Reviews and provides recommendations on applications submitted by missions requesting laser tracking and the priority for this support.
Networks and engineering SC Provides technical expertise in station performance analysis and coordinates engineering improvements across the global SLR network; communicates with both analysts and stations in data quality and quantity improvements.
Transponder SC Provides advice, evaluation, and coordination on support of transponder missions for space geodesy and other scientific applications.
Each of the ILRS Standing Committees has developed tools and Web sites that reach out to the users and the public, to provide information on their specific areas, data, products and interests. Additionally, the ILRS portal maintained by the CB and hosted on Goddard’s CDDIS facility, provides numerous pages with detailed information on all topics related to laser ranging. The content is mostly at the scientific level, but there are additional references that cover the topics at a layman’s level, for the benefit of non-experts and the public. More details on the ILRS portal and the archival facilities of the ILRS can be found in this issue’s article by Noll et al. (this issue).
3 ILRS products
The establishment of the ILRS set priorities for several actions to be undertaken by the various components and associates of the service. One of these was the development of standardized products that were in great demand from the user community. Until then, ad hoc analyses of SLR and LLR data were largely the work of a small number of groups, mostly associated with specific missions (e.g., Starlette, LAGEOS, etc.), the development of specific products (e.g., the prelaunch gravity model for the TOPEX/Poseidon mission), or international campaigns that used such data to monitor Earth geophysics and geodynamics (e.g., the 1980–1985 MERIT campaigns: Monitor of the Earth Rotation and Intercomparison of Techniques Project, Wilkins 2000). During the first decade of LAGEOS’ mission, laser ranging provided a wealth of data and helped verify several geophysical models that were mostly conjectures up until then. The diversity and breadth of these findings is demonstrated by the first collection of such works in the Journal of Geophysical Research (JGR) Special Issue on “LAGEOS Scientific Results”, vol. 90, B11, published by the American Geophysical Union in 1985. From this international collection of works, it was clear that station positioning and tectonic motion, along with Earth rotation and polar motion were some of the key areas where SLR could contribute, along with the more obvious Precision Orbit Determination (POD), gravitational model development and tides. By the time the IERS was formed there was a clear need for standardized products released on a regular schedule, developed based on the IERS Standards and Conventions and supported by a well-regulated organization. To meet this need, the ILRS formed an “Analysis Working Group” (AWG), currently called the “Analysis Standing Committee” (ASC), that was tasked to develop the required products and analysis standards, and the evaluation and validation of candidate groups that would eventually support these operations.
The first official product that was adopted for development was that of averaged station position estimates over a 4-week period, along with daily EOP estimates, namely polar motion and excess length of day. This product was based on tracking data from the two cannonball satellites in high orbits, LAGEOS and LAGEOS-2 (Pearlman et al. this issue). As IERS and ITRS needs evolved, the initial (“monthly”) product changed to a weekly resolution, adopted by the ILRS AWG at the 2003 ILRS Technical Workshop, in Kötzting, Germany. Weekly products were first released in early 2004. By that time, the usefulness of Etalon data for EOP determination was recognized and the two Etalon satellites were added to the group of targets used in support of the official product. As the participating AC operations became more efficient/automated with time, and the official products saw wide acceptance with their contribution to ITRF model development, other users requested similar products that would support their needs. In late 2007, the IERS Rapid Service/Prediction Center for EOP (hosted by the US Naval Observatory) showed interest in getting “as fresh as possible” EOP observations to help improve their EOP forecasts. Initially, a second version of the official weekly product was generated, one that was based on a fixed datum to ensure the consistent alignment of the delivered EOP to the reference frame underlying the USNO forecast series (which is that of the prevailing ITRF). Over the next few years, the AWG developed a new version of the weekly product that was delivered daily, based on a 7-day arc analysis, using the SLR data collected over the past 7 days. In other words, this was the “weekly” product generated now daily, after “sliding” the first day of the arc by one day every day. Since adjacent arcs share 6 days in common, the results are not independent at all. However, after testing this product for several years, it was determined by the AWG and USNO that the polar motion estimates for the penultimate day of the arc, as well as the length of day estimate of the day prior to that, were the most robust and stable estimates for use in their forecast, having the best possible accuracy, yet with only 1–2 days delay. This was the main reason for developing such a product. To distinguish the new product from the former weekly series, it was named “daily” and the adoption of this series as the official ILRS AWG product was set for May 1, 2012. Although it is unlikely that one would use SLR orbits to determine their position in a mode similar to the GNSS PPP technique, there were several other uses of these precise orbits for the SLR targets used in the official ILRS products. It was thus agreed to generate such an orbital product based on the combination of the inputs from the individual ACs. As in the case of the EOP product for USNO, it was decided to generate the orbits in a well-defined Earth-fixed frame, that of the prevailing ITRF, so that they would be useful to as wide a group of users as possible. The corresponding “inertial” versions could be easily obtained by use of the widely available official IERS EOP series, which are by construction consistent with the ITRF. The orbital product was first released to the public in March 2016. In recent years, the ILRS ASC focused its activities on the recovery of systematic errors in the data as well as the monitoring of such in the collected data for keeping the results up to date. Although the initial SLR contributions to the ITRF were adjusting for measurement systematic errors in the initial contributions, the AWG had decided in 2002 to restrict this to non-core sites only, to improve stability of station height estimates. Recent studies pointed out that such systematics are largely responsible for the scale difference between the SLR and VLBI reference frames (Appleby et al. 2016), so the ASC decided in late 2015 to a reanalysis project for the period 1993 to present, where systematics would be adjusted on a weekly basis and for all stations. These results would eventually form a basis for determining the long-term systematics at each site, to be applied a priori the next time an ILRS contribution for the development of a new ITRF is generated. Furthermore, since such systematics change in time and cannot be assumed perfect, a new operational product will deliver updates at weekly intervals, which will extend the current data base into the future. This service will be initiated in late 2018.
Looking to the future, the ASC is now testing the inclusion of data from the latest and most accurate in terms of its design, cannonball target LARES (Ciufolini et al. 2012). With the inclusion of LARES, the gamut of official products will be expanded to include weekly averages of the low degree and order harmonic coefficients of Earth’s gravitational field model. These terms are strongly affected by mass redistribution within the Earth System and a high-resolution time series is a very useful tool for geophysical studies. At the same time, to achieve the best result in analyzing SLR data, one needs to have these terms adjusted, if the temporal variations cannot be modeled from another source (e.g., a geopotential mapping mission like GRACE and GRACE-FO), something rather impossible for operational products (near real-time requirement). Once LARES becomes part of the target group supporting the IERS/ITRF, a corresponding orbital product will be added to the weekly releases. Future improvements in the operational official products foreseen at present include the modeling of loading corrections due to Earth’s fluid envelope, affecting both instantaneous station positions and the orbits of the target satellites. Although the ITRS prefers to not have these corrections included in what is contributed to their ITRF development projects, inclusion of such corrections improves the stability of the weekly time series of station positions and by large removes periodic signals, primarily in station heights. The ASC views this improvement as something that will further enhance the quality and usefulness of the official product, even if that requires an extra effort during the re-analysis steps for the generation of the ITRS-preferred version without the corrections.
It is widely recognized that the current ILRS tracking network is deficient in terms of station geographic distribution and utilized equipment, and cannot meet the GGOS goals for future ITRF accuracy (Kehm et al. 2018). Plans for improvements in both areas are well documented in various publications (e.g., Merkowitz et al. 2018). Theoretically, the present network can deliver weekly estimates of the origin of the TRF with a precision of ~ 0.5 mm in the equatorial components and ~ 1.0 mm in the axial component. In practice, however, the accuracy of the delivered products is about one order of magnitude worse. The main reason behind this are unaccounted systematic errors in the measurement models as well as the dynamics of the system. Based on the results from the recent reanalysis for the development of ITRF2014 (Luceri et al. 2015), the stability of the weekly averaged positions of the core network is at about 1.7 mm over 1993–2014. The accuracy of the orbital products depends on the satellite target. For LAGEOS and LAGEOS-2, the error is estimated at ~ 5 mm radial, ~ 20 mm cross-track and ~ 25 mm along-track. For the Etalon satellites, the accuracy is about one order of magnitude worse due to the limited data contribution (~ 10% that of the LAGEOS data). The hardware improvements that are now slowly being implemented at most of the stations plus the addition of new, state-of-the-art systems in some key locations filling long-outstanding gaps, are expected to vastly improve the coverage of all target satellites in the near future, with concomitant improvements in the ILRS official products.
4 The ILRS network
4.1 Current network
The ILRS coordinates activities for an international network of satellite laser ranging (SLR) and lunar laser ranging (LLR) stations. The network is comprised of a global consortium of stations that range to ILRS-approved targets for science and engineering applications. Since the ILRS does not provide direct funding, stations are typically associated with a host nation’s space or scientific research program and are frequently co-located with other observatory systems (e.g., GNSS receivers, VLBI antennas, DORIS instruments, or gravimeters). Co-location of geodetic techniques is vital for the determination of the terrestrial reference frame. Stations are strongly encouraged to include a co-located GNSS receiver whose data are also provided to the IGS. As of early 2018, five SLR stations are at sites that host all four geodetic techniques (Badary, Greenbelt, Hartebeesthoek, Wettzell, and Yarragadee), and twelve other SLR stations are at sites that host three of the geodetic techniques.Footnote 1
LLR is currently performed at only a small subset of the network (stations in Grasse (France), Matera (Italy), and Apache Point (New Mexico, USA)).
As of early 2018, the ILRS network consisted of nearly 40 continuously operating SLR stations tracking those satellites approved by the Governing Board. This network of globally distributed sites is required for accurate monitoring of satellite orbits and proper sampling of geodynamic parameters such as Earth rotation parameters, the geocenter, and the scale of the terrestrial reference frame. About fifteen stations are designated as “the core network” for ILRS, used to transform the entire network to the terrestrial reference frame. These stations are selected by virtue of the quality and quantity of their data, their geographic location, as well as their stable long-term performance. The current and near-term-planned stations of the ILRS network are shown in Fig. 3.

The green symbols depict those stations currently contributing to the ILRS network on an operational basis; green circled sites indicate the “core sites” contributing to the reference frame analysis; yellow symbols show sites planned for operation in the near term (1–3 years)
4.2 ILRS station operations
The ILRS has established station requirements, data product delivery formats and procedures, and data quality standards that participating stations should follow. At the discretion of the ILRS CB, a station may be designated as an operational or engineering station. Operational stations participate (or plan to participate) in IAG activities at least half of their operating time; engineering stations perform engineering and development work that can be considered relevant to the IAG activities of the ILRS. Currently, the ILRS requires stations to work toward a pass performance standard of at least 3500 passes per year, with at least 200 passes per year on each of the primary satellites used for producing the ILRS contribution to the reference frame (LAGEOS-1, -2, and LARES).
The stations approved by the ILRS for ranging activities are required to follow ILRS guidelines. In general, lower altitude satellites have higher tracking priorities due to the shorter times that they are visible over a tracking station. However, there are exceptions based on scientific considerations for specific satellites and targeted observing campaigns. The ILRS stipulates that, member stations should: (1) range only to those satellites authorized by the ILRS, (2) adhere to restricted tracking procedures, maintain site and system configuration log files, (3) maintain aircraft avoidance and other safety procedures, (4) adhere to ILRS data delivery requirements, and (5) strive to produce the highest quality SLR measurements.
ILRS stations obtain tracking priorities from the ILRS Web site and satellite orbit predictions from an operations or data center. Stations develop ranging schedules based on priorities and field of view and resulting data are submitted to an ILRS operations center. After data quality checks are performed, the ranging data are then submitted to ILRS data centers for archival and distribution to analysis centers and the general user community.
The ILRS CB issues “report cards” on a monthly and quarterly basis to provide statistics on the performance of network stations. The reports tabulate, by station, the previous 12 months of data quality, quantity, and operational compliance using the established ILRS guidelines. Each report contains two types of tables: a table of performance parameters based on data volume, on-site processing statistics, and operational compliance issues; this table also includes plots of the global data set (e.g., pass totals, minutes of data, data RMS, etc.). A second table summarizes station performance parameters based on AC rapid orbital analysis results. Stations can consult these reports to assess and monitor their contribution to the global SLR tracking effort.
4.3 Future network and applications
The current ILRS network has regions of very high concentration (e.g., Europe) and areas of little or no coverage (e.g., southern hemisphere). The challenges for the ILRS network are to continue implementing newer technologies at the current stations and build new stations in regions with little to no coverage. Working with international partners, the ILRS hopes to see the implementation of new systems and upgrades of existing systems to overcome the present mix of new and old technologies, thus enabling more standardization in system hardware and operations.
The NASA Space Geodesy Project is in the process of setting up new single-photon-sensitive SLR systems (SGSLR for Space Geodesy Satellite Laser Ranging) on Maui (Hawaii), McDonald Observatory (Texas) and in cooperation with the Norwegian National Mapping Agency, at Ny-Ålesund (Svalbard). These systems will be co-located with, or in near proximity to, the new VGOS (VLBI) system, as well as multi-constellation GNSS and DORIS, constituting GGOS Core Sites to support reference frame requirements. The prototype SGSLR system (NGSLR) presently at GSFC will also be replaced by the production model. These SLR systems will operate at 2 kHz, and use state-of-the-art, single-photon-sensitive detectors, event timers, and an automated control system. Fabrication is underway and initial operations are scheduled for the 2019–2022 timeframe (see Merkowitz et al. 2018). Also in planning is a second phase, working with local partners, to replace legacy NASA SLR with new systems at sites in Australia, South Africa, Brazil and Tahiti over the latter part of the next decade. Discussions are underway on additional partnership sites (see Merkowitz et al. 2018).
The Russian network is also expanding to help cover geographic voids. New stations are operational in Brasilia and Hartebeestoek (co-located with a NASA legacy system); new installations are underway at Ensenada (Mexico), Java (Indonesia) and Gran Canaria (Spain) (private communication, Natalia Parkhomenko to Michael Pearlman, April 10, 2018). The primary application for the Russian systems is tracking support for the GLONASS constellation, but with a secondary task of supporting other GNSS constellations and GGOS requirements. The co-location of a new Russian SLR system with the NASA system at Hartebeesthoek and with an existing Russian station in Mendeleevo is a new concept to locate two “Tochka” SLR systems at key locations to enhance tracking coverage. A Tochka system is also to replace the current SLR system at Irkutsk. These Russian SLR systems operate at 300 Hz; they are very compact and are in production at the Joint-stock Company « Research-and- Production Corporation in Moscow,(for more details see https://cddis.nasa.gov/2017_Technical_Workshop/docs/presentations/session2/ilrsTW2017_s2_Martynov.pdf).
Several other organizations have plans to install new stations or upgrade existing systems. Two new stations, in testing in India (Ponmundi and Mt. Abu), are planned for operation in the late 2018 timeframe (private communication, Tom Varghese to Michael Pearlman, May 24, 2018). A new station is nearing completion in Metsahovi (Finland); the BKG TIGO system from Concepcion, Chile, is being upgraded and installed as the Argentine-German Geodetic Observatory (AGGO) at La Plata (Argentina) and the Chinese station in San Juan (Argentina) is being upgraded; both are expected to be operational in 2018 (private communication, Hayo Hase to Michael Pearlman, February 26, 2018; private communication, Chengzhi Liu to Michael Pearlman, November 27, 2017). A new station in Wuhan, China is planned for operation in 2018.
Many stations in the network are moving to lower energy systems with orders of magnitude higher repetition rates (100 Hz to several kHz), compared to legacy SLR systems (Wilkinson et al. and McGarry et al. this journal issue). Stations are also installing new detector technology to benefit tracking of geodetic satellites, such as single-photon avalanche diodes, micro-channel plate photomultiplier tubes and other innovative devices (silicon photomultipliers, nanowires etc.) (Wilkinson et al. this journal issue). When tracking, higher repetition rate stations can take data more quickly to form normal points, economizing in time that is used on other targets; faster slewing between targets permits increased pass interleaving, leading to overall increased data yield. Figure 4 shows how satellites can be interleaved during tracking operations.

Example of pass interleaving at Yarragadee station on Nov. 5, 2017 (LEO, LAGEOS, HEO, ALL)
More stations are working on system automation, implementing autonomous stations, and remote operation, thereby reducing associated costs for staffing. Environmental monitoring and situational awareness is integral to system automation to ensure instrument integrity and laser operation safety. Communication in a near real-time configuration enables information-sharing among participating stations and can lead to development of more efficient satellite scheduling and tracking scenarios.
New applications for ILRS stations are mentioned briefly in this article and are discussed in more depth in companion articles in this journal issue. These include time transfer activities (Exertier et al. this issue), two-way interplanetary ranging (Degnan 2002; Smith et al. 2006), space debris tracking (Kirchner et al. 2013), and satellite dynamics studies (Andrés et al. 2004; Kucharski et al. 2014a).
As the ILRS strives to meet the goal of mm accuracy, stations will attempt to improve data quality by improving data precision and reducing system biases. An example that shows how the ILRS strives to improve data quality is by characterizing the long-term stability of the ILRS stations with respect to range biases. Range bias and precision are influenced by the characteristics and performance of the various subsystems which comprise the SLR system such as the laser, detector, timing receiver, and the retroreflector array on the satellite, as well as electronic or other optical delays. They must be accommodated to minimize errors in the ITRF products, particularly TRF scale (c.f. Appleby et al. 2016). We show in Fig. 5 the long-term errors on LAGEOS-1 and -2 from a preliminary systematic analysis by the ILRS standing committee over 1993–2017 based on SLRF2014 (an SLR-specific derivative of ITRF2014). The twin challenges are to characterize these effects in historical data while also communicating and working with the stations to implement the technical changes to improve long-term stability and minimize range bias errors in the future.

Long-term mean systematic measurement errors of the ILRS network tracking systems: Preliminary results from the analysis of LAGEOS-1 and -2 SLR data over the period 1993–2018
5 The space segment
5.1 Passive reflector arrays
Laser ranging targets on satellites require an array of passive, optical corner cubes, whose physical characteristics impose an angular offset on the return beam to compensate for the velocity aberration impressed by the moving satellite. The corner cubes are typically made from radiation-resistant quartz for long life and mounted in a frame to minimize thermal gradients that would cause optical distortion. For Earth-orbiting satellites, the velocity aberration may range from 50 μrad at LEO altitudes down to ~ 25 μrad at GNSS altitudes (Degnan 1993, see Fig. 24). Some typical arrays are shown in Fig. 6. Geodetic satellites are passive spheres, densely covered with corner cubes to present approximately the same high cross section and effective reflection point in all orientations (see Paolozzi et al. this issue). The tighter the packing of the cubes, the smaller the effect of the optical (and range) discontinuities between cubes. GNSS satellites have small flat arrays [e.g., for Beidou see Zhong et al. (2014)] that are built to the ILRS specifications of an effective cross section of 108 m2 (Dell’Agnello et al. 2011).Footnote 2 LEO satellites (e.g., GRACE, GOCE, Cryosat-2, Jason-1, 2, 3, SARAL) use pyramid-shaped arrays, consisting of four to nine prisms symmetrically arranged around a central axis to provide suitable range returns over a variety of orientations (Neubert et al. 1998; Shargorodsky 2002; Costes et al. 2010).Footnote 3 Even for these small arrays, the range correction as a function of incidence angle and orientation can vary by ± 5–8 mm, and must be accounted for in precise orbit determination. The range corrections can be computed using appropriate modeling and through knowledge of the retroreflector characteristics and geometry (e.g., Montenbruck and Neubert 2011; Arnold 2015), and refined by empirical analysis of SLR observation residuals (e.g., see Arnold et al. 2018, Fig. 3; Cerri et al. 2010, Fig. 5).

Photo credit: Chinese Academy of Sciences
Laser ranging targets, left to right: retroreflector array on GRACE satellite (Earth sensing application; figure credit: GFZ)); LAGEOS satellite (geodynamics applications; photo credit: NASA); Galileo satellite (navigation applications; figure credit: ESA); retroreflector array on Beidou satellite (navigation applications)
Recent missions supported by the ILRS include low-orbiting microsatellites and cubesats, carrying small arrays, which require special attention due to limited station visibility and air drag. The challenge for these missions, which generally operate at lower altitudes in a higher drag environment, is to provide operational predictions with sufficient accuracy with which to initiate and maintain SLR tracking.
5.2 Active receivers and transponders in space
SLR with retroreflector has the benefit of a passive, long lived target in space; however, it has the disadvantage of an R−4 return signal strength dependence on range (R), limiting most laser ranging systems to satellites at GNSS and synchronous altitudes. Lunar ranging systems can operate on arrays on the Moon at the single-photon level. If the remote target is a transponder, with an optical (laser) receiver and an optical (laser) return link, the range dependence is now R−2, greatly extending ranging capability, and providing the opportunity to range to Mars and interplanetary missions (Degnan 2002). Success has already been achieved with optical links to satellite receivers on spacecraft on route to Mercury (Smith et al. 2006), to Mars (Degnan 2007), and to the Lunar Reconnaissance Orbiter orbiting the Moon, shown in Fig. 7 (Mao et al. 2017). The links to Mars (80 million km) and the Moon (384 thousand km) were one-way links, but, in the case of the Messenger mission on route to Mercury, a two-way transponder link was established at the distance of 22 million km. The time of arrival of the Earth-generated pulse at the spacecraft was communicated back to Earth and combined with the arrival times of pulses at Earth from the Messenger Laser Altimeter (MLA) to compute the range between the stations with a precision of about 20 cm. Applications of two-way optical transponders include solar systems science, general relativity, and accurate ranging and time transfer for improved Lunar and Interplanetary Mission Operations (Degnan 2002).

Figures credit: NASA
Lunar Reconnaissance Orbiter (LRO) (left); Jason-2 spacecraft with T2L2 timing experiment and SLR retroreflector array onboard (right)
6 Lunar laser ranging
Lunar laser ranging (LLR) has a weak return signal due to the 1/(distance)4 link dependence. LLR stations have a low rate of single-photon returns except for the newer APOLLO site in the USA, using a 3.5 m aperture telescope that facilitates multiphoton returns.
The first tests were off the surface of the Moon (no reflectors) (Smullin and Fiocco 1962; Grasyuk et al. 1964) and evaluated the energy link equations. The first lunar reflector was placed on the Moon on July 21, 1969, by NASA Apollo 11, marking the birth of LLR, followed by Apollo 14 and Apollo 15 (1971) and French arrays on Soviet unmanned rovers Lunakhod 17 (1970) and Lunakhod 21 (1973) (see Figs. 8 and 9).

Figure credit: J. Mueller/U. Hannover/Institut fuer Erdmessung
Laser reflector locations on the Moon

Photo credit: NASA
Laser reflector installed by Apollo 11 mission
The first LLR measurement used the Lick Observatory 3.1-m telescope (Faller et al. 1969), this was followed by the Air Force Cambridge Research Laboratories Lunar Ranging Observatory in Arizona (AFCRL 1970), the Pic du Midi Observatory in France (Calame et al. 1970), the Crimean Astrophysical Observatory of the USSR Academy of Sciences (to Lunakhod 1 in December 1970) (Kokurin et al. 1972) and the Tokyo Astronomical Observatory (Kozai 1972).
The small LLR network is limited to the Northern Hemisphere. The Apache Point Observatory (New Mexico) (Murphy 2009) and the French station Centre d’Etudes et de Recherche en Géodynamique et Astronomie (CERGA) operating at the Observatoire de la Côte d’Azur (OCA) close to Grasse produce regular data. CERGA recently implemented infrared LLR leading to an effective data increase (Courde et al. 2017). The McDonald Observatory (Fort Davis, Texas, U.S.A.) station is inactive although it was a major long-term data contributor (e.g., see Hoffman and Müller 2018, Fig. 2). Several stations are in development. A station is being built at HartRAO (South Africa) utilizing an ex-OCA 1 m aperture telescope (Tsela et al. 2016). The German Geodetic Observatory located at Wettzell, Germany (Federal Agency for Cartography and Geodesy) recently tested an LLR system. The Italian SLR/LLR system located at Matera recently produced data. In addition, the Kunming Station (Yunnan Observatory) reported ranging to Apollo 15’s retroreflectors using a 1.2 m telescope (personal communication, Li Zhulian to Michael Pearlman, January 22, 2018). Within 5 years at least one station will be active in the Southern Hemisphere and several more will be added to locations in the Northern Hemisphere.
LLR contributes to lunar science and is used in the development of the planetary and lunar ephemerides. There are links back into the solar system ephemerides resulting from LLR measurements of the lunar fluid core; the lunar dynamical model for the JPL Planetary and Lunar Ephemerides DE430 includes coupling between lunar fluid core rotation and the mantle (Folkner et al. 2014). LLR allows tests of general relativity. Violation of the Equivalence Principle can be tested as LLR data can be used to determine whether the Earth and Moon fall toward the Sun at the same rate, notwithstanding mass, composition, and gravitational self-energy differences (Williams et al. 2012; Murphy 2013). Tests of possible temporal variation of the gravitational constant and estimates of geodetic precession and the parameterized post-Newtonian (PPN) parameters and can be made using LLR data (e.g., Hoffman and Müller 2018).
A better geometric distribution to reduce biases and more efficient reflectors with better ranging accuracy characteristics have been proposed during the last decade and some designs toward this goal have been made (cf. Currie et al. 2011; Turyshev et al. 2013).
7 Other applications
7.1 One-way ranging and time transfer
Time-of-flight measurements using short-pulse lasers offer the potential of reaching time or coherent frequency phase transfer to the picosec (ps) level. Aside from the benefit of time synchronization and ranging accuracy to the SLR network, it will allow for improved tests of the equation of gravitational redshift (fundamental physics); provides a path forward toward a unique time scale (promising much higher resolution for our reference frames); and will facilitate efforts to transport and compare frequency over large distances by providing synchronous time and a spatial reference.
When ranging to a remote, passive retroreflector array, a clock resolution for the estimation of the measurement epoch of 50 nanosec is sufficient to support ranging precision better than 0.1 mm as desired by GGOS. GPS disciplined oscillators operating at a stability level below 1 part in 1012 are sufficient for the purpose of standard commercial items.
For one-way ranging or time transfer to a satellite, one needs to recognize that the satellite-borne clock runs at a different rate from the clock on the ground (due to effects of relativity). The range is measured from the start epoch at the station (on the ground) to the stop epoch (at the satellite), which are in different reference frames, and the start and stop detectors use different clocks. The measurement requirement now becomes 1 ps for the epoch to reach sub-mm accuracies. We also need to recognize that the epoch of the outgoing laser pulse will have been registered by the local clock after some delay caused by electronics and cables, which may amount to many ps (Schreiber and Kodet 2017). The combination of one-way and two-way ranging allows us to separate the range from the offset of the clock in space, and to isolate and correct biases in the epoch recording path. Experiments with T2L2 on Jason-2 have shown that time transfer among ground stations can be achieved to the level of 100 ps; studies to remove system biases are presently underway (Exertier et al. 2017). Atomic clocks in space such as ACES (Heß et al. 2011) will further enhance timing capability.
7.2 Tracking space debris
Some stations in the ILRS network provide an excellent, relatively low cost, means of tracking and providing precision orbit determination on selected high-priority space debris targets when compared with alternate approaches based on radar (e.g., Laas-Bourez et al. 2012; Kirchner et al. 2013).
In 2012, the ILRS established a Space Debris Study Group (SDSG) to coordinate debris laser ranging activities, to initiate new experiments, and to provide support for SLR stations to extend their capabilities for space debris laser ranging. A dedicated server has been installed in Graz to allow storage and fast exchange of debris ranging data, debris orbit predictions, etc. Participating stations started with defunct satellites with retroreflectors (e.g., TOPEX/Poseidon). Some stations have recently added hardware (i.e., more powerful lasers) to their stations in order to range to non-cooperative targets with smaller optical cross sections.
Space debris laser ranging techniques offer a host of new tools that provide added capability to our understanding of satellite dynamics and the improvement in orbit prediction accuracy—important in the case of predicted conjunction events:
When added to simultaneously taken light curves on a debris target, laser ranging measurements can determine target spin and attitude, and their effects on orbital prediction (e.g., Kucharski et al. 2014b, 2017).
Laser multi-static experiments (one transmitter and multiple spaced-apart receivers) also help to improve orbital prediction accuracy (Wirnsberger et al. 2015).
Pointing information from low cost camera systems photographing a sunlit space debris particle against the stellar background is being used to track (“chase”) the target with laser-based distance measurements (Wagner et al. 2016).
Space debris laser measurements are still in an early stage, but offer significant potential. Space debris observations need to become more operational and easier to handle for stations willing to contribute. Extending observations to daylight would allow for a more continuous coverage of space debris targets and would permit a larger network of stations to focus on selected high-priority targets that would significantly increase the orbit prediction accuracy.
8 The role of the ILRS in Earth science and GGOS
The IAG established the Global Geodetic Observing System (GGOS) in 2004 to improve our understanding and modeling of the effects of global change. This will require precise, consistent and stable reference frames, and better standards and models for Earth geometry and kinematics, gravity field and dynamics, and orientation and rotation (Plag and Pearlman 2009). The approaches used by GGOS are the:
Combination and integration of all available observations, methods, etc.;
Combination of physical measurements and geometric techniques, and the
Improvement in our understanding of the interactions within “System Earth”.
The reference frame pervades all of these. The most stringent requirements on reference frame performance are the monitoring of sea level rise, although other data products are not far behind. The requirement for sea level measurement is 1 mm reference frame accuracy and 0.1 mm/year stability over 10 years (NRC 2010). This has been adopted by GGOS with the following caveats: The frame should be accessible 24 h/day, distributed worldwide, so that users anywhere on the Earth could position their measurements in the consistent, enduring system. The reference frame is developed through a globally distributed ground network of core and co-located SLR, VLBI, GNSS, and DORIS stations, locally tied together with accurate site ties to connect the measurement results from each technique. The availability of more than one technique on satellite targets (e.g., laser arrays on GNSS satellites, VLBI tracking of the latter, etc.) provides an additional “tie” of these techniques, and it can be exploited to identify possible systematic errors in either technique’s data (see Thaller et al. and Riepl et al. this issue). The space segment consists of SLR satellites (LAGEOS, LARES, Etalon), GNSS satellites, DORIS satellites, and quasars. The combination of different techniques, allows us to exploit the strengths of each and mitigate the weaknesses. SLR uniquely provides the Earth center of mass and with VLBI, the reference frame scale.
9 Conclusions and outlook
The SLR network is growing, and data quality is improving. The new QC procedures are revealing errors early in the process to avoid corruption of the products. The more rapid feedback to the stations from the Analysis Standing Committee and the repeated Clinic Sessions at the Workshops are educating and motivating the field crews to improve their performance.
The network still has inadequate coverage in some geographic areas, primarily in Latin America, Africa, and oceanic regions. Germany, China, Russia, and the US have been willing to deploy sites overseas to help fill some gaps. Several groups have plans to continue with more sites, but finding suitable locations can be a challenge due to weather, logistics and political issues. In addition, the operating levels of many of the stations are rated as poor, at too low level to make any real contribution to ILRS data products, most notably, the GGOS reference frame.
As more missions (including more GNSS satellites and more low-orbit microsats) demand SLR coverage, station schedules are becoming saturated. Where stations have done so, interleaving of satellite passes has significantly increased satellite coverage. In addition, the Russian Program approach to add a second SLR system at particularly strategic locations (e.g., Hartebeesthoek, Tahiti, etc.) also offers promise for significant improvement in coverage and capability.
Reducing system measurement biases is an essential step to reaching reliable mm accuracy. Of the space geodesy techniques, laser ranging has the unique capability of measuring range directly and unambiguously. However, even with careful calibrations, it is susceptible to incipient systematic errors due to uncompensated hardware, operational procedures, and exogenous effects. As we improve our understanding of the performance of every individual system component and their interactions, we refine our modeling of the system response and/or we decide on changing to better understood components.
The web-based tools are providing a powerful means of identifying anomalous behavior and better understanding the causes. As these move from development to the operational mode, they should be useful diagnostic tools for both station operations and analysis.
Although new systems and upgrades of legacy systems are underway, the network still needs to overcome its present mix of new and old technologies. We will work toward more standardization in system hardware and operational procedures; or at least, better understand the impact of the differences and how we can better combine the results. Much work has already been done by the experts on modeling the range effects from some of the spherical geodetic satellites for all the combinations of hardware configurations and operational parameters, but reaching mm accuracy still poses some challenges.
One strategy under consideration is spatially and temporally distributing tracking priorities among the stations to try to smooth out the data yield to reduce overabundance of data on some satellites and a dearth on others.
The trend in technology improvements is from legacy systems to higher repetition rate systems (100 Hz to several kHz), and the use of event timers capable of handling multiple pulses in flight, versus single stop Time Interval Units (TIUs). Some systems are going to pulse widths as narrow as 10 ps. The event timers would also support one-way ranging, lunar ranging, time transfer, interplanetary ranging, and other applications. One-way ranging and time transfer will require the improvement in epoch accuracy down to 1 ps.
Laser ranging is a very powerful technique contributing to numerous scientific and engineering research and application areas. Though it is primarily used for precise orbit determination of satellite targets, something that is possible with several other techniques, SLR is the only technique that accurately defines the origin of the international reference frame used by all entities requiring accurate positioning. Furthermore, along with VLBI they define the scale of that frame. Finally, the “positioning-navigation-timing” triad is completely covered by SLR, since it provides the means for highly accurate time transfer across the continents. Lunar and interplanetary applications and research have already delivered impressive results and promise a lot more to come. This paper reviewed the history, status and future plans of the International Laser Ranging Service. Much more information and related publications are available through the service’s comprehensive Web site: https://ilrs.gsfc.nasa.gov, as well as the other articles in this dedicated special issue. We encourage the reader to explore the wide breadth of material available for a more complete picture.
Notes
A list of geodetic co-locations for operational stations of the SLR network is maintained at the URL: https://ilrs.gsfc.nasa.gov/network/stations/active/index.html.
The Jason retroreflector arrays were manufactured in the U.S. by Honeywell Technology Solutions Inc. (HTSI).
References
Air Force Cambridge Research Laboratory (AFCRL) (1970) Report on research at AFCRL: July 1967–June 1970, AFCRL-71-0022, pp. 115–116, Bedford, Massachusetts, 1970
Altamimi Z, Rebischung P, Métivier L, Collilieux X (2016) ITRF2014: a new release of the international terrestrial reference frame modeling nonlinear station motions. J Geophys Res Solid Earth 121:6109–6131. https://doi.org/10.1002/2016jb013098
Andrés JI, Noomen R, Bianco G, Currie DG, Otsubo T (2004) Spin axis behavior of the LAGEOS satellites. J Geophys Res 109:B06403. https://doi.org/10.1029/2003jb00269
Appleby G, Rodríguez J, Altamimi Z (2016) Assessment of the accuracy of global geodetic satellite laser ranging observations and estimated impact on ITRF scale: estimation of systematic errors in LAGEOS observations 1993–2014. J Geod 90:1371. https://doi.org/10.1007/s00190-016-0929-2
Arnold DA (2015) Nominal SARAL transfer function, NASA technical report: NASA/TM-2015-217533, NASA Goddard Space Flight Center, July 2015
Arnold D, Montenbruck O, Hackel S, Sosnica K (2018) Satellite laser ranging to low earth orbiters: orbit and network validation. J Geod. https://doi.org/10.1007/s00190-0018-1140-4
Beutler G (2005) Methods of celestial mechanics. Volume I; physical, mathematical, and numerical principles. Springer, Berlin
Beutler G, Rummel R (2012) Scientific rationale and development of the global geodetic observing system. In: Kenyon SC, Pacino MC, Marti UJ (eds) International association of geodesy symposia, vol 136. Springer, pp 987–993. https://doi.org/10.1007/978-3-642-20338-1_123
Bloßfeld M, Müller H, Gerstl M, Stefka V, Bouman J, Göttl F, Horwath M (2015) Second-degree Stokes coefficients from multi-satellite SLR. J Geod 89(9):857–871. https://doi.org/10.1007/s00190-015-0189-z
Calame O, Filliol MJ, Guerault G, Muller R, Pourny JC, Valence YD, Orszag A, Rosch J (1970) First luminous echos on Moon obtained by laser telemetry from Pic du Midi observatory. Comptes Rendus Hebdomadaires des seances de l’Academie des Sciences, Serie B 270(25):1637
Cerri L, Berthias JP, Bertiger WI, Haines BJ, Lemoine FG, Mercier F, Ries JC, Willis P, Zelensky NP, Ziebert M (2010) Precision orbit determination standards for the Jason series of altimeter missions. Mar Geod 33(S1):379–418. https://doi.org/10.1080/01490419.2010.488966
Cheng M, Tapley BD, Ries JC (2013) Deceleration in the earth’s oblateness. J Geophys Res (Solid Earth) 118(2):740–747. https://doi.org/10.1002/jgrb.50058
Christodoulidis DC, Smith DE, Kolenkiewicz R, Klosko SM, Torrence MH, Dunn PJ (1985) Observing tectonic plate motions and deformations from satellite laser ranging. J Geophys Res 90(B11):9249–9263. https://doi.org/10.1029/jb090ib11p09249
Ciufolini I, Paolozzi A, Pavlis E, Ries J, Gurzadyan V, Koenig R, Matzner R, Penrose R, Sindoni G (2012) Testing general relativity and gravitational physics using the LARES satellite. Eur Phys J Plus 127(133):1–7. https://doi.org/10.1140/epjp/i2012-12133-8
Costes V, Karine Gasc K, Sengenes P, et al (2010) Design and development of the laser retroreflector array (LRA) for SARAL. In: Proceedings of SPIE 7813, remote sensing system engineering III, 78130I, August 26, 2010. https://doi.org/10.1117/12.863537
Couhert A, Cerri L, Legeais J-F, Ablain M, Zelensky NP, Haines BJ, Lemoine FG, Bertiger WI, Desai SD, Otten M (2015) Towards the 1 mm/y stability of the radial orbit error at regional scales. Adv Space Res 55:2–23. https://doi.org/10.1016/j.asr.2014.06.041
Courde C, Torre J-M, Samain E, Martinot-Lagarde G, Aimar M, Albanese D, Exertier P, Fienga A, Mariey H, Metris G, Viot H, Viswanathan V (2017) Lunar laser ranging in infrared at the Grasse laser station. Astron Astrophys. https://doi.org/10.1051/0004-6361/201628590
Currie DG, Dell’Agnello S, Delle Monache G (2011) A lunar laser ranging retroreflector for the 21st century. Acta Astronaut 68(7–8):667–680. https://doi.org/10.1016/j.actaastro.2010.09.001
Dawson J, Sarti P, Johnston GM, Vittuari L (2007) Indirect approach to invariant point determination for SLR and VLBI systems: an assessment. J Geod 81:433–441. https://doi.org/10.1007/s00190-006-0125-x
Degnan JJ (1985) Satellite laser ranging: current status and future prospects. IEEE Trans Geosci Rem Sens GE-23(4):398–413. https://doi.org/10.1109/tgrs.1985.289430
Degnan JJ (1993) Millimeter accuracy satellite laser ranging. In: Smith DE, Turcotte DL (eds) Contributions of space geodesy to geodynamics: technology. American Geophysical Union, Washington, D.C., pp 133–162. https://doi.org/10.1029/gd025
Degnan JJ (1994) SLR 2000: an autonomous and eyesafe satellite laser ranging station. In: Proceedings of ninth international workshop on laser ranging instrumentation, Canberra, Australia, November 7–11, pp 312–323
Degnan JJ (2002) Asynchronous laser transponders for precise interplanetary ranging and time transfer. J Geodyn 34(3–4):551–594. https://doi.org/10.1016/s0264-3707(02)00044-3
Degnan JJ (2007) Asynchronous laser transponders: a new tool for improved fundamental physics experiments. Int J Mod Phys D 16(12A):2137–2150. https://doi.org/10.1142/s0218271807011310
Dell’Agnello S, Delle Monache D, Currie DG, Vittori R, Cantone C, Garattine M, Boni A, Martini M, Lops C, Intaglieeta N, Tauraso R, Arnold DA, Pearlman MR, Bianco G, Zerbini S, Maiello M, Berardi S, Porcelli L, Alley CO, McGarry JF, Sciarretta C, Luceri V, Zagwodzki TW (2011) Creation of the new industry-standard space test of laser retroreflectors for the GNSS and LAGEOS. Adv Space Res 47:822–842. https://doi.org/10.1016/j.asr.2010.10.022
Dow JM, Neilan RE, Rizos C (2009) The international GNSS service in a changing landscape of global navigation satellite systems. J Geod 83(3–4):191–198. https://doi.org/10.1007/s00190-008-0300-3
Exertier P, Belli A, Lemoine JM (2017) Time biases in laser ranging observations: a concerning issue of space geodesy. Adv Space Res 60(5):948–968. https://doi.org/10.1016/j.asr.2017.05.016
Faller J, Winer I, Carrion W, Johnson TS, Spadin P, Robinson L, Wampler EJ, Wieber D (1969) Laser beam directed at the lunar retro-reflector array: observations of the first returns. Science 166(3901):99–102. https://doi.org/10.1126/science.166.3901.99
Fitzmaurice MW (1978) NASA ground-based and space-based laser ranging systems. NASA technical paper 1149, NASA Goddard Space Flight Center, January 1978. https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/19780009417.pdf. Accessed 2 June 2018
Folkner WM, Williams JG, Boggs DH, Park RS, Kuchynka P (2014) The planetary and lunar ephemerides DE430 and DE431. Interplanetary network progress report, Jet Propulsion Laboratory, Pasadena, California, pp 42–196. https://ipnpr.jpl.nasa.gov/progress_report/42-196/196C.pdf. Accessed 2 June 2018
Grasyuk AZ, Zuev VS, Kokurin YL, Kryukov PG, Kurbasov VV, Lobanov VF, Mozhzherin VM, Sukhanovskii AN, Chernykh NS, Chuvaev KK (1964) Dokl. Akad. Nauk SSSR, 154, 1303 [Sov. Phys. Doklad., 9, 162, 1964]
Heß MP, Stringhetti L, Hummelsberger B, Hausner K, Stalford R, Nasca R, Cacciapuoti L, Much R, Feltham S, Vudali T, Léger B, Picard F, Massonnet D, Rochat P, Goujon D, Schäfer W, Laurent P, Lemonde P, Clairon A, Wolf P, Salomon C, Prochazka I, Schreiber KU, Montenbruck O (2011) The ACES mission: system development and test status. Acta Astronaut 69(11–12):929–938. https://doi.org/10.1016/j.actaastro.2011.07.022
Hoffman F, Müller J (2018) Relativistic tests with lunar laser ranging. Class Quantum Gravity 35(3):035015. https://doi.org/10.1088/1361-6382/aa8f7a
Hulley G, Pavlis EC, Mendes VB (2007) A ray-tracing technique for improving satellite laser ranging atmospheric delay corrections, including the effects of horizontal refractivity gradients. J Geophys Res (Solid Earth) 112(B6):B06417. https://doi.org/10.1029/2006jb004834
Kaula WM (1970) The terrestrial environment: solid earth and ocean physics. Report of a study at Williamstown, Massachusetts, sponsored by NASA-Electronics Research Center and MIT Measurement Systems Laboratory
Kehm A, Bloßfeld M, Pavlis EC, Seitz F (2018) Future global SLR network evolution and its impact on the terrestrial reference frame. J Geod 92:625. https://doi.org/10.1007/s00190-017-1083-1
Kirchner G, Koidl F, Kucharski D, Pachler W, Seiss M, Leitgeb E (2009) Graz KHz SLR LIDAR: first results. In: Proceedings of SPIE 7355, photon counting applications, quantum optics and quantum information transfer and processing II, 7355ou (18 May 2009). https://doi.org/10.1117/12.822248
Kirchner G, Koidl F, Friederich F, Buske I, Volker U, Riede W (2013) Laser measurements to space debris from Graz SLR station. Adv Space Res 51(1):21–24. https://doi.org/10.1016/j.asr.2012.08.009
Kokurin YuL, Kurbasov VV, Lobanov VF, Sukhanovskii AN, Chernykh NS (1972) Laser location of the reflector on board Lunokhod-1. Sov J Quantum Electron 1(5):555–557
Kozai Y (1972) Lunar laser ranging experiments in Japan. Space Res, XII, pp 211–217
Kucharski D, Lim H-C, Kirchner G, Otsubo T, Bianco G, Hwang J-Y (2014a) Spin axis precession of LARES measured by satellite laser ranging. IEEE Geosci Remote Sens Lett 11(3):646–650. https://doi.org/10.1109/lgrs.2013.2273561
Kucharski D, Kirchner G, Koidl F, Fan CB, Carman R, Moore C, Dmytrotsa A, Ploner M, Bianco G, Medvedskij M, Makeyev A, Appleby G, Suzuki M, Torre JM, Zhang ZP, Grunwaldt L, Feng Q (2014b) Attitude and spin period of space debris Envisat measured by satellite laser ranging. IEEE Trans Geosci Remote Sens 52(12):7651–7657. https://doi.org/10.1109/tgrs.2014.2316138
Kucharski D, Kirchner G, Bennett JC, Lachut M, Sosnica K, Koshkin N, Shakun L, Koidl F, Steindorfer M, Wang P, Fan C, Han X, Grunwaldt L, Wilkindson M, Rodriguez J, Bianco G, Vespe F, Catalan M, Salmins K, del Pino JR, Lim HC, Park E, Moore C, Lejba P, Sucholdolski T (2017) Photon pressure force on space debris TOPEX/Poseidon measured by satellite laser ranging. Earth Space Sci 4(10):661. https://doi.org/10.1002/2017ea000329
Laas-Bourez M, Wailliez S, Deleflie F, Klotz A, Albanese D, Saba N (2012) First astrometric observations of space debris with the MeO telescope. Adv Space Res 49(3):603–611. https://doi.org/10.1016/j.asr.2011.11.007
Lemoine FG, Zelensky NP, Chinn DS, Pavlis DE, Rowlands DD, Beckley BD, Luthcke SB, Willis P, Ziebart M, Sibthorpe A, Luceri V (2010) Towards development of a consistent orbit series for TOPEX, Jason-1, and Jason-2. Adv Space Res 46(12):1513–1540. https://doi.org/10.1016/j.asr.2010.05.007
Luceri V, Pavlis EC, Pace B, König D, Kuzmicz-Cieslak M, Bianco G (2015) Overview of the ILRS contribution to the development of ITRF2013. In: van Dam T (ed) REFAG 2014. International association of geodesy symposia, vol 146. Springer, Cham, pp 101–108
Mao D, McGarry JF, Mazarico E, Neumann GA, Sun X, Torrence MH, Zagwodzki TW, Rowlands DD, Hoffman ED, Horvath JE, Golder JE, Barker MK, Smith DE, Zuber MT (2017) The laser ranging experiment of the lunar reconnaissance orbiter: five years of operations and data analysis. Icarus 283:55–69. https://doi.org/10.1016/j.icarus.2016.07.003
McGarry J, Merkowitz S, Donovan H, Horvath J, Clarke C, Degnan J, Cheek J, Nelson A, Patterson D, Mann A, Hall F, Ricklefs R, Varghese T, Zagwodzki T, Pavlis E (2013) The collocation of NGSLR with MOBLAS-7 and the future of NASA satellite laser ranging. In: Proceedings of the 18th international workshop on laser ranging, Fujiyoshida, Japan, November 11–15, 2013. https://cddis.nasa.gov/lw18/docs/papers/Session7/13-03-01-McGarry.pdf. Accessed 2 June 2018
Mendes VB, Pavlis EC (2004) High-accuracy zenith delay prediction at optical wavelengths. Geophys Res Lett 31:L14602. https://doi.org/10.1029/2004gl020308
Merkowitz SM, Bolotin S, Elosegui P et al (2018) Modernizing and expanding the NASA Space Geodesy Network to meet future geodetic requirements. J Geod. https://doi.org/10.1007/s00190-018-1204-5
Montenbruck O, Gill E (2001) Satellite orbits: models, methods and applications. Springer, Berlin. ISBN 978-3-642-58351-3
Montenbruck O, Neubert R (2011) Range correction for the CryoSat and GOCE laser retroreflector arrays, DLR/GSOC TN-11. https://ilrs.gsfc.nasa.gov/docs/TN_1101_IPIE_LRA_v1.0.pdf. Accessed 2 June 2018
Murphy TW (2009) Lunar ranging, gravitomagnetism, and APOLLO. Space Sci Rev 148(1–4):217–223. https://doi.org/10.1007/s11214-009-9491-z
Murphy TW (2013) Lunar laser ranging: the mm challenge. Rep Prog Phys 76:076901. https://doi.org/10.1088/0034-4885/76/7/07690
Neubert R, Grunwaldt L, Neubert J (1998) The retro-reflector for the CHAMP satellite: final design and realization. In: Proceedings of the 11th international workshop on laser ranging, pp 260–270
Noll CE (2010) The crustal dynamics data information system: a resource to support scientific analysis in space geodesy. Adv Space Res 45(12):1421–1440. https://doi.org/10.1016/j.asr.2010.01.018
Noll CE, Ricklefs R, Horvath J et al (2018) Information resources supporting scientific research for the international laser ranging service. J Geod. https://doi.org/10.1007/s00190-018-1207-2
NRC Committee on the National Requirements for Precision Geodetic Infrastructure (2010) Precise geodetic infrastructure: national requirements for a shared resource. National Academies Press, Washington, D.C.
Pearlman MR, Degnan JJ, Bosworth JM (2002) The international laser ranging service. Adv Space Res 30(2):135–143. https://doi.org/10.1016/s0273-1177(02)00277-6
Plag H-P, Pearlman M (eds) (2009) GGOS: meeting the requirements of a global society on a changing planet in 2020. Springer, Berlin. ISBN 978-3-642-02687-4
Plotkin HH, Johnson TS, Spadin P, Moye J (1965) Reflection of ruby laser radiation from explorer XXII. In: Proceedings of IEEE, pp 301–302. https://doi.org/10.1109/proc.1965.3694
Ries J (2016) Reconciling estimates of annual geocenter motion from space geodesy. In: Proceedings of the 20th international workshop on laser ranging, Potsdam, Germany, October 9–14, 2016. https://cddis.nasa.gov/lw20/docs/2016/papers/14-Ries_paper.pdf. Accessed 2 June 2018
Sarti P, Sillard P, Vittuari L (2004) Surveying co-located space geodetic instruments. J Geod 78(3):210–222. https://doi.org/10.1007/s00190-004-0387-0
Schmid R, Rothacher M (2003) Estimation of elevation-dependent satellite antenna phase center variations of GPS satellites. J Geod 77(7–8):440–446. https://doi.org/10.1007/s00190-003-0339-0
Schmid R, Dach R, Collilieux X, Jäggi A, Schmitz M, Dillsner F (2016) Absolute IGS antenna phase center model igs08.atx: status and potential improvements. J Geod 90(4):343–364. https://doi.org/10.1007/s00190-015-0876-3
Schrama E (2018) Precise orbit determination performance for CryoSat-2. Adv Space Res 61(1):235–247. https://doi.org/10.1016/j.asr.2017.11.001
Schreiber KU, Kodet J (2017) The application of coherent local time for optical time transfer and the quantification of systematic errors in satellite laser ranging. Space Sci Rev 214:222. https://doi.org/10.1007/s11214-017-0457-2
Schuh H, Behrend D (2012) VLBI: a fascinating technique for geodesy and astrometry. J Geodyn 61:68–80. https://doi.org/10.1016/j.jog.2012.07.007
Schutz BE, Tapley BD (1980) Orbit accuracy assessment for SEASAT. J Astronaut Sci 28(4):371–390
Schutz BE, Cheng MK, Eanes RJ, Shum CK, Tapley BD (1993) Geodynamic results from starlette orbit analysis. In: Smith DE, Turcotte DL (eds) Contributions of space geodesy to geodynamics. American Geophysical Union, Washington, D.C. https://doi.org/10.1029/gd024
Seeber G (2003) Satellite geodesy. Walter de Gruyter, Berlin. ISBN 3-11-017549-5
Shargorodsky V (2002) CryoSat-LRR-01 laser retro reflector technical description, K01-E1095-00-00 TO, scientific research institute for precision instruments, Moscow. https://ilrs.gsfc.nasa.gov/docs/CRYOSAT_LRR_01_DATA_PACKAGE.pdf. Accessed 2 June 2018
Sinclair AT (1997) Data screening and normal point formulation. International laser ranging service. https://ilrs.gsfc.nasa.gov/data_and_products/data/npt/npt_algorithm.html. Accessed 2 June 2018
Smith DE, Kolenkiewicz R, Dunn PJ, Plotkin HH, Johnson TS (1972) Polar motion from laser tracking of artificial satellites. Science 178(4059):405–406. https://doi.org/10.1126/science.178.4059.405
Smith DE, Kolenkiewicz R, Dunn PJ, Robbins JW, Torrence MH, Klosko SM, Williamson RG, Pavlis EC, Douglas NB, Fricke SK (1990) Tectonic motion and deformation from satellite laser ranging. J Geophys Res (Solid Earth) 95(B13):22013–22041. https://doi.org/10.1029/jb095ib13p22013
Smith DE, Zuber MT, Sun X, Neumann GA, Cavanaugh JF, McGarry JF, Zagwodzki TW (2006) Two-way laser link over interplanetary distance. Science 311(5757):53. https://doi.org/10.1126/science.1120091
Smullin LD, Fiocco G (1962) Project luna see. In: Proceedings of the institute of radio engineers (correspondence), vol 50, pp 1703–1704. https://doi.org/10.1109/jrproc.1962.288157
Sosnica K, Prange L, Kazmierski K, Bury G, Dorzdzewski M, Aajdel R, Hadas T (2018) Validation of Galileo orbits using SLR with a focus on satellites launched into incorrect orbital planes. J Geod 92(2):131–148. https://doi.org/10.1007/s00190-017-1050-x
Steigenberger P, Montenbruck O (2017) Galileo status: orbits, clocks, and positioning. GPS Solut 21:319–321. https://doi.org/10.1007/s10291-016-0566-5
Tapley BD, Ries JC, Davis GW, Eanes RJ, Schutz BE, Shum CK, Watkins MM, Marshall JA, Nerem RS, Putney BH, Klosko SM, Luthcke SB, Pavlis D, Williamson RG, Zelensky NP (1994) Precision orbit determination for TOPEX/Poseidon. J Geophys Res 99(C12):24383–24404. https://doi.org/10.1029/94jc01645
Tourain C, Moreaux G, Auriol A, Saunier J (2016) DORIS Starec ground antenna characterization and impact on positioning. Adv Space Res 58(12):2707–2716. https://doi.org/10.1016/j.asr.2016.05.013
Tsela P, Combrinck C, Botha R, Ngobo B (2016) Thermal analysis of the LLR optical telescope tube assembly based in Hartebeesthoek radio astronomy observatory. Acta Geod Geophys 51(3):393–403. https://doi.org/10.1007/s40328-015-0132-6
Turyshev SG, Williams JG, Folkner WM, Gutt GM et al (2013) Corner-cube retro-reflector instrument for advanced lunar laser ranging. Exp Astron 36(1–2):105–135. https://doi.org/10.1007/s10686-012-9324-z
van den Ijssel J, Encarnação J, Doornbos E (2015) Precise orbits for the Swarm satellites. Adv Space Res 56(6):1042–1055. https://doi.org/10.1016/j.asr.2015.06.002
Wagner P, Hampf D, Sproll F, Hasenohr T, Humbert L, Rodmann J, Riede W (2016) Detection and laser ranging of orbital objects using optical methods. In: Ardanuy PE, Puschell JJ (eds) Remote sensing system engineering VI, proceedings of SPIE, 9977(UNSP 99770D). https://doi.org/10.1117/12.2236919
Wilkins GA (2000) Project MERIT and the formation of the international earth rotation service. In: Dick S, McCarthy D, Luzum B (eds) Polar motion: historical and scientific problems, proceedings of IAU colloquium 178. Astronomical society of the Pacific conference series, vol 208, pp 187–200
Williams JG, Turyshev SG, Boggs DH (2012) Lunar laser ranging tests of the equivalence principle. Class Quantum Gravity 29(18):184004. https://doi.org/10.1088/0264-9381/29/18/184004
Willis P, Fagard H, Ferrage P, Lemoine FG, Noll CE, Noomen R, Otten M, Ries JC, Rothacher M, Soudarin L, Tavernier G, Valette JJ (2010) The international DORIS service (IDS): toward maturity. Adv Space Res 45(12):1408–1420. https://doi.org/10.1016/j.asr.2009.11.018
Wilson P, Reinhart E (1993) The Wegener-Medlas project preliminary results on the determination of the geokinematics of the eastern mediterranean. In: Smith DE, Turcotte DL (eds) Contributions of space geodesy to geodynamics: crustal dynamics, geodynamics. American Geophysical Union, Washington D.C., pp 299–309. https://doi.org/10.1029/gd023p0299
Wirnsberger H, Baur O, Kirchner G (2015) Space debris prediction errors using bi-static laser observations. Case study: ENVISAT. Adv Space Res 55(11):2607–2615. https://doi.org/10.1016/j.asr.2015.02.018
Wu X, Ray J, van Dam T (2012) Geocenter motion and its geodetic and geophysical implications. J Geodyn 58:44–61. https://doi.org/10.1016/j.jog.2012.01.007
Zelensky NP, Lemoine FG, Chinn DS, Beckley BD, Bordyugov O, Yang X, Wimert J, Pavlis D (2016) Towards the 1-cm SARAL orbit. Adv Space Res 58(12):2651–2676. https://doi.org/10.1016/j.asr.2015.12.011
Zhong Z-P, Zhang H-F, Chen W-Z, Li P, Meng W-D, Wang Y-M, Wang J, Hu W, Yang F-M (2014) Design and performances of laser retro-reflector arrays for Beidou navigation satellites and SLR observations. Adv Space Res 54(5):811–817. https://doi.org/10.1016/j.asr.2013.12.025
Acknowledgements
Michael R. Pearlman acknowledges the support of NASA Grant 80NSSC18K0220. Ulrich Schreiber acknowledges the support from the “Deutsche Forschungsgemeinschaft” contract SCHR 645/6-5 within the Research Group FOR1503. Erricos C. Pavlis acknowledges the support of NASA Grant NNX15AT34A. Carey E. Noll, Frank G. Lemoine, and John J. Degnan acknowledge the support from the NASA Space Geodesy Project.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Pearlman, M.R., Noll, C.E., Pavlis, E.C. et al. The ILRS: approaching 20 years and planning for the future. J Geod 93, 2161–2180 (2019). https://doi.org/10.1007/s00190-019-01241-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00190-019-01241-1