
Abstract
Although the computational burden of global navigation satellite systems (GNSS) data processing is nowadays already a big challenge, especially for huge networks, integrated processing of denser networks with data of multi-GNSS and multi-frequency is desired in the expectation of more accurate and reliable products. Based on the concept of carrier range, in this study, the precise point positioning with integer ambiguity resolution is engaged to obtain the integer ambiguities for converting carrier phases to carrier ranges. With such carrier ranges and pseudo-ranges, rigorous integrated processing is realized computational efficiently for the orbit and clock estimation using massive networks. The strategy is validated in terms of computational efficiency and product quality using data of the IGS network with about 460 stations. The experimental validation shows that the computation time of the new strategy increases gradually with the number of stations. It takes about 14 min for precise orbit and clock determination with 460 stations, while the current strategy needs about 82 min. The overlapping orbit RMS is reduced from 27.6 mm with 100 stations to 24.8 mm using the proposed strategy, and the RMS could be further reduced to 23.2 mm by including all 460 stations. Therefore, the new strategy could be applied to massive networks of multi-GNSS and multi-frequency receivers and possibly to achieve GNSS data products of higher quality.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Global navigation satellite systems (GNSS) are nowadays widely applied in precise geodetic positioning from reference frame establishment and crustal deformation monitoring to control point surveying. On the one hand, thanks to the successful development of the International GNSS Service (IGS) (Beutler et al. 1994; Dow et al. 2009), the IGS reference network has been expanding continuously and reaches up to about 460 stations recently (Neilan et al. 2013). On the other hand, a number of regional networks, also known as continuously operating reference stations (CORS), have been established as national infrastructure for regional reference frame, positioning and navigation, and geohazard monitoring and early warning. For example, there are over 1,350 stations in the US CORS since 2008 (Snay and Soler 2008), over 1,000 stations in China (Dang et al. 2011) and over 1,300 in the GEONET network in Japan (Sagiya 2004).
Following the great success of the US GPS navigation satellite system, the Russian GLONASS system has been in full operation since 1990s. The European Galileo system has accomplished recently its first position determination of a ground location using the four Galileo satellites currently in orbit (http://www.esa.int/Our_Activities/Navigation/Galileo_fixes_Europe_s_position_in_history), several launches of additional satellites are planned in the next years. Also the Chinese BeiDou system (BDS) is providing regional service since 2012, and it is planned to complete its constellation for global service around 2020 (Yang et al. 2011; Montenbruck et al. 2012). Moreover, the modernization of GPS and GLONASS and the newly emerging systems will provide more signals, for example, a third carrier frequency. Therefore, besides the thousands of ground stations, there will be four navigation satellite systems together comprising probably more than 120 transmitting satellites with more than three frequencies available for precise positioning in the coming years.
As demonstrated, integrated processing of multi-GNSS and multi-frequency data could achieve more accurate and more reliable results through the complementarity of different systems (Montenbruck et al. 2013) if appropriate processing strategies are applied. It is also necessary for providing multi-GNSS positioning services where inter-system biases must also be estimated and provided (Schönemann et al. 2011). It should be mentioned that integrated solutions are essential for applications in which both positions and their stochastic information, i.e., covariance matrix, are of interest, for example, for combining daily solutions for reference frame establishment (Altamimi et al. 2008), deformation monitoring of tidal gauge stations (Schöne et al. 2009) and post-glacial rebound (Larson and van Dam 2012).
Furthermore, GNSS is playing a very important role together with very long baseline interferometry (VLBI), satellite laser range (SLR) and Doppler orbitography and radiopositioning integrated by satellite (DORIS) (Willis et al. 2005) in the establishment and maintenance of global and regional reference frames, especially for the densification through regional systems, because of its global coverage, low cost and easy maintenance. As each technology may contribute differently to the reference frame parameters, combining all the technologies, especially on the observational level, is also suggested (Gambis et al. 2009).
The major challenge of the integrated processing is the very high computational burden caused by the estimation of a huge number of integer phase ambiguity parameters. Even for the GPS system alone, the large number of ambiguities already makes the data processing of huge networks very difficult.
One of the traditional strategies for analyzing huge networks is to divide the whole network into several sub-networks and then combine them on the normal equation (NEQ) level where a certain number of common stations are needed in order to connect the sub-networks together. As the common stations are used more than once in different sub-networks, the covariance of combined solution is theoretically different from the integrated solution on the observation level.
Ge et al. (2006a) proposed an approach by removing all parameters not in use, named as inactive parameters, from NEQ to enhance the computational efficiency. However, the parameter elimination at each epoch is still time-consuming. It increases along with the number of stations and satellites and becomes even longer if the measurements on the third carrier frequency are included (Schönemann et al. 2011).
Using the precise point positioning (PPP) technique (Zumberge et al. 1997), Blewitt et al. (2010) developed a new approach for processing massive networks by converting carrier-phase observations to so-called “carrier range” using the double-differenced (DD) integer ambiguities resolved based on the fixed point theorems.
Recent development of PPP ambiguity resolution (Ge et al. 2008; Collins et al. 2008; Laurichesse et al. 2009; Bertiger et al. 2010) enables reliable ambiguity resolution at a single station by making use of the precisely estimated uncalibrated phase delay (UPD) at the satellites additionally to the precise orbits and clocks. A number of studies were undertaken for validating and improving the UPD estimates (Geng et al. 2009, 2012; Li and Zhang 2012). Although PPP ambiguity resolution is a hot topic in current GNSS research, the motivation of the study by Ge et al. (2008) was, however, the realization of a solution for huge GNSS networks (Ge et al. 2006b).
In this study, a new computationally efficient strategy is proposed for integrated processing of massive GNSS networks based on the carrier-range concept. PPP with ambiguity resolution is applied to all stations using the precise orbit and clock products and satellite UPDs derived from a core reference network. With the resolved integer ambiguities, all the phase observations are converted to carrier ranges on the station base. Both pseudo-ranges and carrier ranges are suggested to be utilized in the integrated solution of massive networks. Since the UPDs play a very important role in PPP ambiguity resolution, the performance of UPDs is also investigated in this paper. In the following, current strategies for data processing of huge GNSS networks and PPP ambiguity resolution methods will be briefly reviewed in Sect. 2. The details of the new strategy will be presented in Sect. 3, and the experimental validation and the results will be shown and discussed in Sects. 4 and 5, respectively.
2 Review of current strategies
2.1 Network analysis
In GNSS network processing, station coordinates, satellite orbits, receiver and satellite clock biases, zenith troposphere delays (ZTD) and carrier-phase ambiguities are usually estimated as unknown parameters. Clock biases must be eliminated epoch-by-epoch as they are usually parameterized as white noise or first-order Gauss–Markov process, while other parameters are often kept in NEQ system and are inverted together if their covariance matrix is required. The ambiguity parameters are usually kept in the NEQ and inverted together for the DD ambiguity resolution following the sequential bias-fixing strategies (Blewitt 1989; Dong and Bock 1989; Ge et al. 2005). The largest number of parameters is those of the ambiguities and then of the ZTD parameters in form of piece-wise constant/linear models depending on the step size of the updated interval. The number of these parameters increases remarkably with the increase in number of stations and/or satellites and causes the heavy computational load in current data processing of huge GNSS networks.
In order to shorten the computational time, Ge et al. (2006a) advised that the parameters in a least square adjustment, whose covariance is not of interest, could be eliminated from the NEQ as soon as they are not used by any further observation equation. This method could significantly reduce the dimension of NEQ and could save about two-third computation time compared to the original strategy where inactive parameters are also kept in the NEQ.
Further investigation shows that 82.7 % computational time is spent on the elimination of the epoch-wise parameters, such as receiver and satellite clocks, and of the inactive parameters, for example, ambiguities and ZTDs. As shown in the experimental validation, for a network comprising 300 stations, it takes about 20 min on a computer with a Intel Core i7 (2.6 GHz) processor. This is mainly because the clock elimination becomes rather slow due to the correlation among the large amount of ambiguities. In such case, it is very difficult to process larger networks and/or data with higher sampling rate for providing high-rate satellite clocks.
Based on the fixed point theorems, Blewitt (2008) combined all the PPP solutions with real-valued ambiguities through fixing double-differenced (DD) ambiguities over a set of optimally selected independent baselines to achieve a precise network solution. The approach is named as AMBIZAP and takes about two and a half hours for processing a network of about 1,300 stations (Blewitt 2008). However, it cannot provide the complete covariance matrix of the station coordinates and cannot be applied to the rigorous network processing as satellite orbits and clocks must be fixed. For rigorous massive network solution, Blewitt et al. (2010) converted the carrier-phase observations into a range-like observation, referred as to carrier range, using the ambiguities from AMBIZAP in the above-mentioned approach. The carrier range could be processed as pseudo-range except that it has the carrier-phase accuracy. Certainly, it could be contaminated by a clock-like bias which will be absorbed by the associated clock parameter. This was also the first time to show that carrier range could be used to determinate orbits efficiently.
As the undifferenced (UD) ambiguities used in the carrier-range conversion are transformed from the fixed DD ambiguities, in order to have a consistent datum for such conversion, a set of independent baselines of the minimum span tree is selected to connect all the stations. Problematic baselines whose ambiguities cannot be resolved must be avoided (Blewitt et al. 2010). It is obvious that the selection of such baselines plays an important role in this approach. Therefore, in this paper, we propose a robust way to generate carrier-range observations by directly estimating the UD integer ambiguities using PPP with ambiguity resolution.
2.2 PPP with ambiguity resolution
In the past, only DD ambiguities can be fixed to integer because of the existence of UPDs at the receivers and satellites. Gabor and Nerem (1999) showed that the daily wide-lane (WL) UPD (WLUPD) changes hardly over several months, while the daily narrow-lane (NL) UPD (NLUPD) is quite unstable due to possible biases in satellite orbits and clocks used and the noise of receivers in the processing. Thanks to the continuously improved IGS orbit and clock products and the GNSS receivers, Ge et al. (2008) found that the NLUPDs are quite stable over a short time period of several tens of minutes and implemented an approach to estimate the NLUPD as piece-wise constant based on PPP derived real-valued ambiguities from about 100 IGS stations. With the estimated UPDs, PPP ambiguity resolution was successfully carried out for hundreds of IGS stations, and the position accuracy was improved consequently. Laurichesse et al. (2009) advised to use the satellite clock biases to absorb the NLUPDs, and in their experiments, around 88 % of narrow-lane ambiguities could be resolved with daily data. Collins (2008) also provided a similar model called decoupled clock model. Lately, it was confirmed that all these approaches are equivalent in theory and perform comparably in practice (Geng et al. 2010). Bertiger et al. (2010) also achieved ambiguity resolution for a single receiver in the form of DD ambiguity utilizing a “WLPBLIST” file produced by GIPSY software which contains wide-lane and narrow-lane ambiguities for each station–satellite pair during the orbits and clock determination.
It is clear that UPDs of receivers and satellites could not be estimated simultaneously in an absolute sense. For PPP ambiguity resolution, only single-differenced (SD) ambiguities between satellites can be fixed to integer, as the receiver UPD is anyway unknown. Therefore, SD UPD between satellites is in principle sufficient (Ge et al. 2008). However, in this paper, UD UPDs are estimated based on the UD ambiguities using the method described by Li and Zhang (2012) and Ge et al. (2012), because using the UD UPDs is more flexible in both theoretical expression and software realization. In order to assess the stability of the UPD estimates, they are estimated as random walk process with a proper power density to exhibit their temporal variations.
3 New strategy for massive networks
We first present the mathematical principle of the new strategy in terms of the carrier-range generation based on PPP ambiguity resolution and the estimation using carrier ranges. Then, the processing procedure of the new strategy is explained and illustrated in details. Finally, the difference between carrier-range method and the classic method with ambiguity resolution is discussed with an example.
3.1 Mathematical principle
Without loss of generality, we assume that ionosphere-free phase \((L_c)\) and range \((P_c )\) observations are used in the network processing, and the observation equations are
where, \(L_1,\,L_2,\,P_1\hbox { and }P_2\) are phase and range observations of the two frequencies \(f_1\hbox { and }f_2\), respectively, where phase observations are in unit of length. \(dt_R\hbox { and }dt_S\) are receiver and satellite clock biases, respectively. \(\rho \) is the non-dispersive delay including geometric delay, tropospheric delay and any other delay which affects all the observations identically. \(b_c\) is the \(L_c\) ambiguity. The phase center correction and the phase windup effect must be considered in modeling. The satellite-dependent differential code biases (DCB) (Schaer and Steigenberger 2006) should be applied, especially if different types of range observations are employed. Multipath effect and noise are not included for clarity. For the similar reason, the uncalibrated range delays, which in principal should also be considered, are ignored, as they are not distinguishable from the clock parameters and have no bad effects on the carrier-range generation.
The ambiguity \(b_c\) is usually expressed by wide-lane and narrow-lane ambiguities for integer ambiguity resolution as
Both \(b_w\hbox { and }b_n\) include integer ambiguity and UPD at receiver and satellite. In fact, \(b_w\) is not an integer, however, according to Ge et al. (2008), wide-lane ambiguities could be replaced by its fixed integer and the related WLUPDs could be merged into the associated narrow-lane ambiguity, so that Eq. (2) becomes
where \(N_w\) is the fixed integer value of the wide-lane ambiguity; \(N_n,\,\delta b_{nr}\hbox { and }\delta b_n^s\) are the integer narrow-lane ambiguity, and the related UPD for the receiver and satellite, respectively.
The wide-lane ambiguities are estimated using the Melbourne–Wübbena (MW) combination (Melbourne 1985; Wübbena 1985). With the estimates of wide-lane ambiguities of a network, WLUPD can be estimated precisely and applied to any station for UD wide-lane ambiguity fixing. Furthermore, with the fixed wide-lane ambiguity and the estimated \(b_c\), narrow-lane ambiguities can be derived according to Eq. (3). Similar to the wide lane, NLUPDs can be estimated from the NL ambiguities of a network.
As soon as both wide-lane and narrow-lane ambiguities are fixed, by taking consideration of that \(N_n =N_1\hbox { and }N_w = N_1 -N_2\), Eq. (3) can be reformulated as
Inserting Eq. (4) into Eq. (1) and move the fixed integer ambiguities to the left side of the equation, we have the observation equations without ambiguities as
Obviously, the left side is the ionosphere-free combination of the integer ambiguity-aligned phase observations of \(\textit{L}_{1}\) and \({\textit{L}}_{2}\), referred as to \(\textit{L}_{1}\) and \({\textit{L}}_{2}\) carrier range, respectively. The combined is the Lc carrier range correspondingly. Therefore, the equation can be written as
where \(\bar{L}_c\) is the Lc carrier range; and \(\bar{L}_1\hbox { and }\bar{L}_2\) are \({L}_{1}\hbox { and} {L}_{2}\) carrier range, respectively. This equation is fully equivalent to the phase observation in Eq. (1), except the integer ambiguities are replaced by the resolved integers.
When only \(\bar{L}_c\) is used for parameter estimation, the UPDs \((\delta b_{nr}\hbox { and }\delta b_n^s )\) will be absorbed by satellite and receiver clock biases. In order to obtain the consistent satellite clocks with the results using Eq. (1) directly, both \(\bar{L}_c\hbox { and }\hbox {P}_\mathrm{c}\) observations are suggested to be applied and then the UPDs have to be estimated as unknowns. In addition, those ambiguities that are not fixed in the PPP ambiguity resolution could still be estimated in the final parameter estimation.
3.2 Processing procedure
Based on the above discussions, similar to the strategy by Blewitt et al. (2010), the proposed strategy includes the following five steps as illustrated in Fig. 1.
-
1)
Precise orbits and clocks are determined in the same way as done at the IGS analysis centers using a global network with about 100 IGS stations (e.g., Gendt et al. 2013).
-
2)
Satellite WLUPDs and NLUPDs are estimated using the LC ambiguities of the network solution and WL ambiguities based on the MW combination. UPDs are estimated epoch wise by means of filtering using all the active ambiguities as observations. Each UPD is parameterized as a random walk process. The power density of the process could be fine-tuned in order to tackle its possible rapid changes, for example, for satellites of Block IIA type in eclipse, although the UPDs are rather stable for most of the satellites.
-
3)
Static PPP with daily data is carried out for each station iteratively for data editing. Then, the WLUPDs and NLUPDs are applied to recover the integer characteristics the estimated real-valued UD ambiguities. The sequential resolution is recommended for achieving the best fixing performance.
-
4)
With the fixed integer ambiguities in L1 and L2, phase observations are converted to carrier ranges. For each station, a new RINEX file is generated in which phases are replaced by carrier range with a special flag and the others are kept unchanged. It is worth to mention that the new RINEX file is fully equivalent to the original if the special flag is ignored.
-
5)
The integrated processing is carried out in the same way as the network solution in the first step with the same parameters except that no ambiguities are estimated anymore. If only carrier range is used as proposed by Blewitt et al. (2010), UPDs cannot be estimated because they are fully correlated with the clocks. The estimated clocks will be exactly biased by the NLUPD. Although this characteristics could be utilized to provide a special clock correction to directly obtain ambiguities with integer nature in PPP (Collins 2008; Laurichesse et al. 2009), the associated clocks are not consistent with that from the first step or with IGS products. Thus, we suggest to use both carrier ranges and pseudo-ranges and to consider receiver and satellite UPDs as unknown determined parameters.

Flow chart of the new strategy for massive GNSS networks based on the carrier-range concept
3.3 Advantage of the new strategy
Besides the improvement in computational efficiency due to the removal of ambiguity parameters in advance of the estimation, using carrier ranges generated with the UD ambiguities can also increase the data continuity, so that better solutions could be achieved compared to that using classic method with DD ambiguity resolution. For a better understanding of this advantage, we hereafter explain with an example that using carrier range could further reduce the number of to be estimated ambiguities.
Let us assume that there are three stations observing two satellites, and Station 1 tracks the satellites continuously, whereas data at Station 2 and 3 are interrupted into three segments as illustrated in Fig. 2. We have 14 UD ambiguities totally, two, six and six for Station 1, 2 and 3, respectively.

An exemplar data set for demonstrating the difference between using carrier-ranges and the classic method
For the classic processing with DD ambiguity fixing, six independent DD ambiguities can be defined and all are assumed fixable. Thus, the freedom for the ambiguity parameters is eight, i.e., 14 UD ambiguities minus six fixed constraints. In other words, eight UD ambiguities must still be estimated in the fixed solution.
Assume that the cycle slips at Station 2 and 3 can be correctly repaired, that means we have only two UD ambiguities at any of the three stations. In this case, we have in total six UD ambiguities and two independent DD ambiguities. Therefore, only four UD ambiguities are estimated instead of eight in the classic method.
In the case of using carrier ranges, all data segments belonging to a satellite–station pair are connected continuously, if their UD ambiguities can be fixed correctly. That means in the carrier-range method, all stations “track” the satellites continuously even a satellite is not visible.
Theoretically, the number of the estimated ambiguities in the carrier-range method is equal to the number of stations and satellites with one as reference if all UD ambiguities are fixed to integer. These ambiguities are actually referred as to satellite and receiver UPDs in this paper which cannot be separated from the related clock parameters if only carrier ranges are used and they are determined by the code-range observations if both carrier ranges and code ranges are utilized.
4 Experimental validation
To validate the new strategy, the PANDA (Positioning And Navigation Data Analyst) software (Liu and Ge 2003; Shi et al. 2008) developed at the GNSS Research Center in the Wuhan University was modified for carrying out the associated data processing. A module for estimating UPDs and applying UPD for PPP ambiguity resolution and a module to produce RINEX file with carrier ranges were implemented, and the estimator was also adapted to support the network analysis with UPD parameters. All the experimental computations were achieved on a computer with Intel Core i7 (2.6 GHz) processor, 16 GB memory.
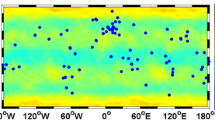
Data from DOY 201 to 289, 2012, of the IGS global network were used for the experimental validation. There are about 460 stations with data over the selected time period. Among these stations, about 100 stations were selected as core stations for precise orbit and clock, EOP and UPD estimation with current strategy. Then, all the 460 stations were processed using the proposed strategy and involved in the computational time test. The station distribution is shown in Fig. 3 where red triangles are for the 100 stations for the estimation of precise orbits and clocks and blue dots for the other 360 stations of the massive network.

Station distribution of the experimental network. There are about 460 stations in total. Among them, 100 stations indicated with red triangles are used as core stations to estimate satellite orbits, clocks and UPDs
As aforesaid, the daily data processing includes (1) precise orbit and clock determination with about 100 stations, (2) UPD estimation based on the estimated ambiguities in the first step, (3) PPP with ambiguity resolution, (4) generation of new RINEX files with carrier ranges for all stations, (5) integrated solution of all 460 stations. The network solution in (1) and (5) was carried out in the same way and with the same parameters as is done at the GFZ IGS Analysis Center (Gendt et al. 1999) except that no ambiguities are estimated in (5).
In the UPD estimation, a very large power density of about \(0.1\,\mathrm{cycles}/{\sqrt{s}}\) was assigned to the UPD parameterized as a random walk process, in order to exhibit its stability. The estimated UPD time series will be investigated, and ambiguity fixing performance using the estimate UPDs is also assessed.
The integrated solution of the 460 stations was carried out in two modes: (1) using carrier range only and (2) using carrier range and pseudo-range and with UPD as unknown parameters, referred as to Strategy A and B, respectively. In the integrated processing, all stations used in the first step for precise orbit and clock estimation were still constrained tightly. The estimated orbits, clocks and station coordinates of the integrated solution were evaluated by comparing with the IGS final products and by the overlapping orbital differences.
For the validation of the computational efficiency, data of the 460 IGS stations on DOY 235, 2012, were employed. Networks comprising different number of stations were processed using Strategy A and B, and the computational time was recorded. Besides Strategy A and B, such processing was also undertaken using the approach proposed by Ge et al. (2006a), for comparison, which is called Strategy C below.
5 Results
As in this paper we are concentrated on the robust generation of the carrier range, we first checked the quality of the estimated NLUPDs and the performance of the PPP ambiguity resolution. Afterward, the products estimated using the new strategy including stations coordinates and orbits were assessed. Although a very careful investigation of all the kind of products over a long period should be carried out in order to confirm the improvement in the new method, we focused now only on the satellite orbits due to the limitation of the software package in hand. Finally, the computation time for the different approaches and stations numbers was also investigated in more detail.
5.1 UPD performance
Since the WLUPD is proved being quite stable and the WL ambiguity is easily to be fixed due to the long wavelength, we focus on the NLUPD that is very critical in the new processing strategy. As an example, the standard deviation (STD) of NULUPD for each satellite on the day 239 is shown in Fig. 4 in red triangles. In general, the STD is quite similar and is smaller than 0.05 cycles for most of satellites except that of G08 and G09 with a significantly larger value. The averaged NLUPD STDs for the satellites over the days 201 to 289, 2012, are also shown in Fig. 4 in blue squares where the jumps for Block IIA satellites in eclipse (see discussion below) were removed. From the plot, all the averaged STDs are less than 0.05 cycles. This confirms the stability of the NLUPDs.

STD of the estimated NLUPDs. The red triangles are the STD of NLUPDs on the day 239, 2012 where the jumps are not removed, whereas the blue squares are the mean STD over the days 201–289, 2012 after the removal of jumps
As satellite G08 and G09 are both in eclipse on this day, time series of all the eclipsed satellites are inspected and shown in Fig. 5. The data absence of G27 at the beginning is due to the lack of precise satellite clocks. We found that the UPD of a Block IIA satellite has often a jump of about 0.3–0.4 cycles after an eclipse. This is most likely related to the imprecise yaw model or inaccurately modeled force shortly after the eclipse period. After removing the jumps, the STDs reduce to 0.03 and 0.04 cycles for G08 and G09, respectively, which is almost the same as that of the other normal satellites.

UPD time series for eclipse satellites; the red line marks the eclipse periods. Block IIA satellites in eclipse are on the right-hand side
From the results, we recommend that an additional UPD parameter should be estimated after an eclipse for Block IIA satellites at least for the final integrated solution.
5.2 UPD quality
The fixing rate of the PPP ambiguity resolution can be a direct indicator for assessing the quality of the estimated UPDs, as it represents how well the NLUPD is consistent with the fractional part of the ambiguities. To fix ambiguities as much as possible, we still estimate the UPD epoch-by-epoch in this step, although they are rather stable as discussed above.
On each day, for about 300 stations among the total 460 stations, all the ambiguities can be fixed, about 130 stations have a fixing rate between 95 and 100 %, and only about 12 stations have a lower fixing rate between 90 and 95 %. We have noticed that the fixing rate for Block IIA satellites in eclipse is comparable to that of the other satellites and that most of the unfixable ambiguities have a low elevation angle. This fixing statistics confirms that the estimated NLUPDs are very consistent with the ambiguities and enables a high fixing rate which is very crucial for the integrated processing.
5.3 Station coordinates
From our comparison, Strategy A and Strategy B provide almost the same estimates except the clock corrections which are biased by the NLUPDs in Strategy A. Thus, for the evaluation of the station coordinates and orbits, only results of Strategy B are presented.
The estimated station coordinates are compared with that of the IGS weekly solution. The averaged RMS in east, north and up directions after having applied a seven-parameter Helmert transformation for removing possible systematic differences are better than 2.3, 2.5, and 5.9 mm, respectively, which is similar to the inconsistency between the Analysis Center’s and IGS final products.
5.4 Satellite orbits
For the assessment of the estimated orbits, they are first compared to IGS final orbits, and then, the orbit differences over the day boundary are also analyzed.
The orbits of the current strategy with the core network of 100 stations, the orbits of Strategy B (using the new method with carrier-range and code-range observations) with the core network, and those of Strategy B with the whole network of 460 stations are compared with the IGS final products. The averaged RMS of the three orbit products over the days from 201 to 289 is shown in Fig. 6 in red, green and blue, respectively. It can be found that the RMS is less than 10 mm for most of the satellites except some of the BLOCK IIA satellites in eclipse, i.e., G04, G08, G09 and G27. Comparing the RMS of the current strategy and that of Strategy B with the core network, RMS of most satellites is reduced by the new strategy and the averaged RMS of all satellites decreases from 10.2 to 9.0 mm. However, when all 460 stations are included in Strategy B, the RMS gets slightly larger to about 9.2 mm compared to that using the core network. This might be a hint that IGS final products could not be a proper reference for assessing the improvement on orbits of the new method, although they are of high quality.

Averaged orbit RMS with respect to IGS final orbits. The red columns indicate RMS of the orbit using current strategy with 100 core stations, whereas the green columns are for that of Strategy B using the same 100 stations and the blue columns are for that of all 460 stations
The RMS of the overlapping orbit differences over the day boundary provides a more realistic indicator for orbit quality assessment. The overlapping orbit RMS of the current strategy using 100 core stations, Strategy B with the same 100 stations and Strategy B with all 460 stations are plotted in Fig. 7 in red, green and blue, respectively. As shown in Fig. 7, with the same 100 stations, it is obvious that the overlapping RMS is reduced for most of the satellites and significant reduction can be found for satellites with a large RMS when using the current strategy. For example, orbits of G06, G09, G15 and G27 are improved by 19, 15, 14 and 26 %, respectively. Statistically, the averaged RMS of the overlapping orbits for all the satellites is improved by about 9.8%, reduced from 27.6 to 24.8 mm. The major reason, as explained in the Sect. 3.3, should be the difference between the resolution of double-difference ambiguity in the current strategy and the resolution of the one-way ambiguity in the new strategy. In the former one, there is usually more than one ambiguity for each station and satellite pair for daily data because of the satellite revolution, whereas in the latter one, each station and satellite pair could have only one ambiguity.

RMS of the overlapping orbit differences. The red columns indicate RMS of the orbit using current strategy with 100 core stations, whereas the green columns are for that of Strategy B using the same 100 stations and the blue columns are for that of Strategy B with all 460 stations
Furthermore, the overlapping orbit RMS of Strategy B can be further reduced to 23.2 mm by including all 460 stations. In principal, it is always true that better products will be achieved if more stations are properly involved. For clarity, such a large number of stations are utilized for computational efficiency test instead of showing the improvement in the quality or optimizing the network for precise orbit determination.
5.5 Processing time
In order to test the computational efficiency of our new strategy, the computation time for networks with different number of stations using Strategy A, B and C is recorded and plotted in Fig. 8. All tests were carried out on a computer with MAC OS system, and the hardware is described in Sect. 4. Most of the computation time in GNSS network processing is for the data cleaning carried out iteratively based on the post-fit residuals. The residuals could be from an estimation in network mode or baseline mode. For the data processing of large GNSS networks, the network solution is very time-consuming, and few poor stations could significantly increase the iteration number. Therefore, PPP is introduced for data cleaning (Zhang et al. 2007). In this case, the data processing is similar to the new strategy except the estimation of UPD and the generation of carrier-range files including PPP ambiguity resolution. The estimation of UPD takes not more than 1 min, while the PPP ambiguity resolution and the generation of carrier-range files take about 5 s for each station with a sampling rate of 30 s in this study. More important is that the generation is run on station base, thus can be scheduled parallel in different processors and computers. Therefore, we compared here the computation time of a single iteration of the parameter estimation using the Strategy A (using carrier range), Strategy B (using carrier range and code range with UPD parameters) and Strategy C [using the current strategy by Ge et al. (2006a)] for networks with different number of stations.

Comparison of computation times of Strategy A (using carrier range), Strategy B (using carrier range and code range with UPD parameters) and Strategy C [using the strategy by Ge et al. (2006a)] for networks with different number of stations
From Fig. 8, it becomes clear that the computation time of Strategy B is slightly longer than that of Strategy A, as Strategy B has additionally about 32 UPDs for satellites and one UPD for each receiver. Their computation time is almost linearly correlated with the number of stations, whereas that of Strategy C increases very quickly along with the station number. For the network of 460 stations, Strategy A, B and C need the computation time of about 14, 16 and 82 min, respectively. Therefore, due to the existence of the ambiguity parameters, even only active parameters are kept, Strategy C needs about six times of computation time of the new strategy. Such a long computation time for a single iteration of estimation makes the integrated solution of massive network almost impossible.
6 Conclusions
A new GNSS data processing strategy based on the carrier-range concept is presented, and its application demonstrated for the processing of very large ground networks. In the new strategy, the precise orbits and clocks are determined from a global network with about 100 stations, and the UPDs are derived from the UD ambiguities. Then, PPP with ambiguity resolution is carried out for all the stations of the massive network by making use of the estimated UPDs. Afterward, all the phases are converted to carrier ranges, and new RINEX files are generated for all stations. Finally, the integrated solution is performed in a computationally efficient way because of the disappearance of the ambiguity parameters.
The experimental validation shows that the computation time for a network of 460 stations can be reduced from 82 min of the current strategy to about 14 min for the new strategy. The computational time of the new strategy increases nearly linearly along with the increasing number of stations of the network.
The experiments also show that the satellites orbits could be improved by the new strategy remarkably due to the enhenced continuity of carrier-range observations, and they could be further improved by extending networks. As the satellite clocks are determined by both the carrier phases and pseudo-ranges in current IGS data processing, in order to keep the estimated clocks consistent with the IGS products, we suggest to use both pseudo-range and carrier range with UPD as unknown parameters in the integrated solution instead of carrier range only.
The stability of the UPDs is critical for the performance of PPP ambiguity resolution, which is a key step in the new strategy. Our assessment shows that generally narrow-lane UPDs are rather stable over 24 h. However, UPD discontinuities could occur for Block IIA satellites after eclipses. Therefore, another UPD parameter should be estimated after any eclipse for Block IIA satellites.
With the new strategy, the high computational burden for current data processing will be significantly reduced. Furthermore, integrated processing of multi-GNSS and multi-frequency data for massive networks could be realized with possible improved data product quality.
References
Altamimi Z, Collilieux X, Boucher C (2008) Accuracy assessment of the ITRF datum definition. In: VI Hotine–Marussi symposium on theoretical and computational geodesy, IAG symposium, vol 132, pp 101–110. doi:10.1007/978-3-540-74584-6_16
Bertiger W, Desai SD, Haines B, Harvey N, Moore AW, Owen S, Weiss Jan P (2010) Single receiver phase ambiguity resolution with GPS data. J Geod 84(5):327–337. doi:10.1007/s00190-010-0371-9
Blewitt G (1989) Carrier phase ambiguity resolution for the global positioning system applied to geodetic baselines up to 2,000 km. J Geophys Res 94(B8):10187–10203
Beutler G, Mueller II, Neilan RE (1994) The international GPS service for geodynamics: development and start of official service on January 1, 1994. Bull Geod 68:39–70
Blewitt G (2008) Fixed point theorems of GPS carrier phase ambiguity resolution andt heir application to massive network processing: Ambizap. J Geophys Res 113(B12410):2008. doi:10.1029/2008JB005736
Blewitt G, Bertiger W, Weiss JP (2010) Ambizap3 and GPS carrier-range: a new data type with IGS applications. IGS Workshop 2010, Newcastle. http://research.ncl.ac.uk/IGS2010/abstract.htm
Collins P, Lahaye F, Héroux P, Bisnath S (2008) Precise point positioning with ambiguity resolution using the decoupled clock model. In: Proceedings of ION GNSS 21st international technical meeting of the satellite division. Savannah, US, pp 1315–1322
Collins P (2008) Isolating and estimating undifferenced GPS integer ambiguities. In: Proceedings of national technical meeting. San Diego, USA, pp 720–732
Dang Y, Zhang P, Zhao Z, Bei J (2011) The data processing and analysis of national GNSS CORS network in China. In: The XXV general assembly of IUGG Melbourne, Australia, 2007–2010 China National report on geodesy, Report No. 4
Dong D, Bock Y (1989) Global positioning system network analysis with phase ambiguity resolution applied to crustal deformation studies in California. J Geophys Res 94(B4):3949–3966
Dow J, Neilan RE, Rizos C (2009) The international GNSS service in a changing landscape of global navigation satellite systems. J Geod 83:191–198. doi:10.1007/s00190-008-0300-3
Gabor MJ, Nerem RS (1999) GPS carrier phase ambiguity resolution using satellite–satellite single difference. In: Proceedings of 12th international technical meeting of satellite division. Nashville, USA, pp 1569–1578
Gambis D, Biancale R, Carlucci T, Lemoine JM, Marty JC, Bourda G, Charlot P, Loyer S, Lalanne T, Soudarin L, Deleflie F (2009) Combination of earth orientation parameters and terrestrial frame at the observation level. J Geod 134:3–9
Ge M, Gendt G, Dick G, Zhang FP (2005) Improving carrier-phase ambiguity resolution in global GPS network solutions. J Geod 79:103–110. doi:10.2007/s00290-005-0447-0
Ge M, Gendt G, Dick G, Zhang PF, Rothacher M (2006a) A new data processing strategy for huge GNSS global networks. J Geod 80:199–203. doi:10.1007/s00190-006-0044-x
Ge M, Gendt G, Rothacher M (2006b) Integer ambiguity resolution for precise point positioning: applied to fast integrated estimation of very huge GNSS networks. VI Hotine–Marussi symposium of theoretical and computational geodesy: challenge and role of modern geodesy, May 29–June 2, 2006, Wuhan, China
Ge M, Gendt G, Rothacher M, Shi C, Liu J (2008) Resolution of GPS carrier-phase ambiguities in precise point positioning (PPP) with daily observations. J Geod 82(7):389–399. doi:10.1007/s00190-007-0187-4
Ge M, Douša J, Ramatschi M, Nischan T, Wickert J (2012) A novel real-time precise positioning service system: global precise point positioning with regional augmentation. J GPS 11(1):2–10. doi:10.5081/jgps.11.1.2
Geng J, Teferle FN, Shi C, Meng X, Dodson AH, Liu J (2009) Ambiguity resolution in precise point positioning with hourly data. GPS Solut 13:263–270. doi:10.1007/s10291-009-0119-2
Geng J, Meng X, Dodson AH, Teferle FN (2010) Integer ambiguity resolution in precise point positioning: method comparison. J Geod 84:569–581. doi:10.1007/s00190-010-0399-x
Geng J, Shi C, Ge M, Dodson AH, Lou Y, Zhao Q, Liu J (2012) Improving the estimation of fractional-cycle biases for ambiguity resolution in precise point positioning. J Geod 86:579–589. doi:10.1007/s00190-011-0537-0
Gendt G, Dick G, Söhne W (1999) GFZ analysis Center of IGS: Annual Report 1998. IGS 1998 Technical Reports, pp 79–97
Gendt G, Deng Z, Ge M, Nischan T, Uhlemann M, Beeskow M, Brandt A (2013) GFZ Analysis Center of IGS Annual Report for 2012. IGS 2012 Technical, Report, pp 61–66
Larson KM, van Dam T (2012) Measuring postglacial rebound with GPS and absolute gravity. Geophys Res Lett 27(23):3925–3928. doi:10.1029/2000GL011946
Laurichesse D, Mercier F, Berthias JP, Broca P, Cerri L (2009) Integer ambiguity resolution on undifferenced GPS phase measurements and its application to PPP and satellite precise orbit determination. Navig J Inst Navig 56(2):135–149
Li X, Zhang XH (2012) Improving the estimation of uncalibrated fractional phase offsets for PPP ambiguity resolution. J Navig 65:513–529. doi:10.1017/S0373463312000112
Liu J, Ge M (2003) PANDA software and its preliminary result of positioning and orbit determination. Wuhan Univ J Nat Sci 8(2B):603–609
Melbourne WG (1985) The case for ranging in GPS-based geodetic systems. In: Proceedings of first international symposium on precise positioning with the global positioning system, US, pp 373–386
Montenbruck O, Hauschild A, Steigenberger P, Hugentobler U, Teunissen P, Nakamura S (2012) Initial assessment of the COMPASS/BeiDou-2 regional navigation satellite system. GPS Solut 17:211–222. doi:10.1007/s10291-012-0272-x
Montenbruck O, Steigenberger P, Khachikyan R, Weber R, Langley, RB, Mervart L, Hugentobler U (2013) IGS-MGEX: preparing the ground for multi-constellation GNSS science. In: 4th international colloquium scientific and fundamental aspects of the Galileo programme, ESA, 2013
Neilan R, Fisher S, Khachikyan R, Ceva J, Craddock A, Donnelly N, Maggert D, Walia G (2013) IGS Technical Report 2012 Central Bureau. IGS Technical Report 2012, pp 13–18
Sagiya T (2004) A decade of GEONET: 1994–2003: the continuous GPS observation in Japan and its impact on earthquake studies. Earth Planets Space 56(8):XXIX–XLI
Schaer S, Steigenberger P (2006) Determination and use of GPS differential code bias values. In: Proceedings IGS workshop 2006, Darmstadt, Germany, 8–11 May 2006
Shi C, Zhao Q, Geng J, Lou Y, Ge M, Liu J (2008) Recent development of PANDA software in GNSS data processing. In: Proceedings of SPIE 7285, international conference on earth observation data processing and analysis (ICEODPA), 72851S (December 29, 2008). doi:10.1117/12.816261
Schöne T, Schön N, Thaller D (2009) IGS tide gauge benchmark monitoring pilot project (TIGA): scientific benefits. J Geod 83(3–4):249–261
Schönemann E, Becker M, Springer T (2011) A new approach for GNSS analysis in a multi-GNSS and multi-signal environment. J Geod Sci 1(3):204–214. doi:10.2478/v10156-010-0023-2
Snay RA, Soler T (2008) Continuously operating reference station (CORS): history, applications, and future enhancements. J Surv Eng 134(4):95–104
Willis P, Bar-Sever Y-E, Tavernier T (2005) DORIS as a potential part of a global geodetic observing system. J Geodyn 40(4–5):494–501. ISSN 0264–3707. doi:10.1016/j.jog.2005.06.011
Wübbena G (1985) Software developments for geodetic positioning with GPS using TI-4100 code and carrier measurements. In: Proceedings of first international symposium on precise positioning with the global positioning system, US, pp 403–412
Yang YX, Li JL, Xu JY, Tang J, Guo H, He H (2011) Contribution of the compass satellite navigation system to global PNT users. Chin Sci Bull 56(26):2813–2819. doi:10.1007/s11434-011-4627-4
Zhang FP, Gendt G, Ge M (2007) GPS data processing at GFZ for monitoring the vertical motion of global tide gauge benchmarks, Technical report for projects TIGA and SEAL, GeoForschungsZentrum Potsdam, Scientific Technical, Report STR07/02, pp 13–14
Zumberge JF, Heflin MB, Jefferson DC, Watkins MM, Webb FH (1997) Precise point positioning for the efficient and robust analysis of GPS data from large networks. J Geophys Res 102(B3):5005–5017. doi:10.1029/96JB03860
Acknowledgments
We thank Dr. Geoffrey Blewitt, Dr. Pascal Willis and two anonymous reviewers for their constructive comments which improved the manuscript significantly. We also thank IGS for providing the GNSS data and the precise products. The first author is financially supported by China Scholarship Council (CSC) for his study at the German Research Center for Geosciences (GFZ). This work was also partly supported by the National Natural Science Foundation of China (Nos.: 41374033 and 41304007) and the Changjiang Scholars program.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Chen, H., Jiang, W., Ge, M. et al. An enhanced strategy for GNSS data processing of massive networks. J Geod 88, 857–867 (2014). https://doi.org/10.1007/s00190-014-0727-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00190-014-0727-7