
Abstract
A ground motion model (GMM) for interface subduction zone earthquakes of Northeast India (NEI) and its adjacent countries is developed for the first time. Countries adjacent to NEI are Bangladesh, Bhutan, China, Myanmar and Nepal. High-magnitude earthquakes occur frequently in these regions due to buildup of high-stress parameters in the subduction zone of the Indian tectonic plate. Strong motion data are too few and sparse to develop a robust GMM for this region. We used both finite-fault simulations and a stochastic point-source model in developing our GMM. In our GMM, we used 50,000 ground motion samples which were stochastically simulated for different moment magnitudes (Mw) of 5.0–9.0 and hypocentral distances of 30–300 km using a point-source seismological stochastic model and finite fault model. In this study, we calculated stress drop (∆σ), quality factor Q(f) and all other region-specific seismic input parameters from the past strong motion records of interface subduction zone earthquakes of NEI and its adjacent countries. We used these seismic input parameters in ground motion simulation. Sensitivity analyses of the input parameters were also performed to check the bias of the present model. Our GMM was validated by comparing it with the existing NEI interface strong motion records. We compared our GMM with other GMMs developed for interface subduction zone earthquakes for different regions in the world. We also compared our GMM with point-source and finite-fault simulation models. Ground motion parameters estimated using the point-source model are comparatively higher than the finite-fault simulation model. Horizontal components of peak ground acceleration (PGA) and spectral acceleration (Sa) can be estimated for NEI using our GMM.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Region-specific ground motion models (GMMs) are used to estimate the seismic hazard at a site or in a region. Many researchers have developed GMMs for different regions of the world either with abundant available strong motion data or with numerical simulations when earthquake records are sparse. In this study, a GMM for interface subduction zone earthquakes in Northeast India (NEI) and its adjacent countries was developed with numerical simulation due to the small number of recorded events (12) in the region.
NEI has historically faced seismic threats due to its tectonic setting. Twenty large-magnitude (Mw > 7.0) earthquakes have occurred in NEI and its adjacent countries since 1400 A.D. (Rahman 2012). Goswami and Sharma (1982) estimated the average recurrence interval of large-magnitude earthquakes (Mw ≥ 8.0) in NEI and its adjacent countries as 25–30 years. Their prediction was based on Gumbel’s theory of extreme events. Parvez and Ram (1997) estimated that the cumulative probability of occurrence of Mw ≥ 7.0 earthquakes for NEI ranged from 0.881 to 0.995 for a period of 40 years. They also concluded that NEI should expect great earthquakes at any moment in the future. Sil et al. (2015) characterized NEI and adjoining regions as having a very high rate of seismicity. They predicted that in the future, there is a high probability of earthquakes of Mw > 6 in NEI and its adjacent countries, but did not estimate the seismic hazard from these earthquakes.
As per the Indian Standard (IS) Code of Practice IS 1893: 2016, India is divided into four seismic zones, namely II–V. Zones II–IV have seismic zone factors 0.1, 0.16 and 0.24, respectively. Seismic zone V has the highest zonal factor of 0.36 which is used for estimating the design horizontal seismic coefficient. Therefore, seismic zone V is considered the most severe seismic zone in India where many devastating earthquakes have already occurred. However, the design spectral acceleration values in IS 1893: 2016 are based only on the historical seismicity of the region and do not consider various other seismic factors like active faults and their characterization. Upgrading of IS 1893: 2016 is essential to account for more current seismic hazard information on NEI that includes better characterization of seismic sources including active faults and other related seismic input parameters in the region.
In general, two types of earthquakes occur in NEI, namely crustal and subduction earthquakes. Crustal earthquakes occur above 15 km, and rare crustal earthquakes occur at deeper levels in NEI (Mitra et al. 2005; Chen and Molnar 1983). Young et al. (1997) described two types of subduction zone earthquakes: interface and intraslab. Subduction zone interface earthquakes are shallow-angle thrust events and occur at the interface between the subducting and overriding plates. Youngs et al. (1997) stated that GMMs for crustal and subduction zone earthquakes are different, and for each type of earthquake, separate GMMs are required. Lin and Lee (2008) also stated that ground motion parameters for intraslab subduction earthquakes are 20–30% higher than the interface subduction earthquakes.
The occurrence of interface seismic events is restricted to depths of 10–55 km (Llenos and McGuire 2007). Lin and Lee (2008) reported that interface subduction zone earthquakes occur at shallower depths. They described an interface earthquake in Taiwan with a focal depth of 5.65 km. Youngs et al. (1997) suggested that focal depths of interface subduction earthquakes are less than 50 km. Tichelaar and Ruff (1993) also suggested that interface subduction earthquakes take place at focal depths less than 50 km. Atkinson and Boore (2003) reported that the focal depths for interface earthquakes are less than 50 km. Therefore, in this study, we used focal depth criteria of 10–50 km to classify the interface subduction zone earthquakes in NEI and its adjacent countries to develop our GMM.
Tichelaar and Ruff (1993) described that the focal mechanism of interface subduction zone earthquakes is consistent with underthrusting. This implies that slip vector orientation mostly represents the thrust type of earthquake. Tichelaar and Ruff (1993) also discussed that the dip angles of fault planes for interface earthquakes are normally less than 35°.
The focal mechanisms of interface subduction earthquakes in NEI are quite complex and are predominantly thrust-type events consistent with underthusting and the slip vector orientation being mostly of the thrust type (Kundu and Galahaut 2012). In NEI, interface earthquakes are identified based on thrust-type events, shallow dip angles and focal depth. We fixed the focal depth limit for the interface subduction zone earthquakes of NEI and adjacent countries as 10–50 km. Dip angles for interface earthquakes in NEI and adjacent countries vary from 14° to 34°. The dip angles and focal depths for all the interface earthquake events used in this study are presented in Table 1.
Nath et al. (2012) proposed a GMM for the Shillong region located in NEI by considering 30 strong motion records. Earthquakes occurring in the Shillong region are crustal earthquakes. Gupta (2010) developed response spectral attenuation relations for in-slab earthquakes in the Indo-Burmese subduction zone considering only three strong motion records for Mw 7.2, 6.4 and 6.3. These GMMs are not valid for interface subduction zone earthquakes. Das et al. (2006) conducted seismic hazards analysis for NEI based on their GMM developed by combining earthquakes records both for crustal and subduction zone earthquakes. This model can also not be used categorically for the interface subduction zone earthquakes for NEI and adjacent countries.
To date, suitable region-specific GMMs for interface subduction zone earthquakes are not yet available for NEI. With this background and considering the high seismic activity of NEI, we developed a GMM for interface subduction zone earthquakes for NEI and its adjacent countries.
2 Seismotectonics Framework and Historical Seismicity
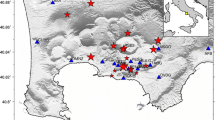
The tectonics and geology of NEI and its adjacent countries are complex and seismically active. The seismotectonics map of NEI is shown in Fig. 1a. NEI and its adjoining regions are considered to be the most severe seismic zone in the world (Bora et al. 2016). NEI comprises seven states covering over an area of 254,979 km2. In NEI, there are 11 important cities with a population more than 10,00,000.

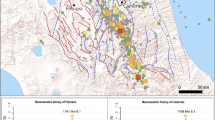
a, b The tectonic and seismotectonic map of NEI and its adjacent countries. The figure shows NEI interface earthquakes of Mw ≥ 6.0 and focal depth 10 to 50 km
Goswami and Sharma (1982) and Singh et al. (2016) divided NEI into six tectonic blocks. Of the six tectonic blocks, the Arakan Yoma belt tectonic (AYBT) block is considered a subduction zone in NEI and its adjacent countries (Rahman 2012). The Indian tectonic plate is bounded by four major tectonic plates: the Eurasian Plate in the north, the Australian Plate in the southeast, the African Plate to the southwest and the Arabian Plate in the west. The Indian Plate is moving northward relative to the Eurasian Plate and collides with it. As a result, the Indian Plate is subducted by the Eurasian Plate. The Indo-Burma (Myanmar) subduction boundary is highly oblique to the direction of relative velocity of the Indian Plate with respect to the Eurasian Plate (Satyabala 2003). This area includes features of active subduction zones in NEI such as the Wadati-Benioff zone of earthquakes, a magmatic arc, and thrust and fold belts (Satyabala 2003). The Burmese arc forms the eastern margin of the Indian Plate where the Indian lithospheric slab is subducted eastward beneath the Burmese Plate (Ni et al. 1989).
Two major faults are recognized in the Indo-Burma subduction region, the Kabaw and the Sagaing faults (Fig. 1a). The Kabaw fault (also called the eastern boundary fault) forms a major tectonic break between the Indo-Burma Range (IBR) and the Myanmar Central Basin (MCB), and it continues to the southwest Andaman fault (Nandy 1986). The Kabaw fault forms a boundary between the IBR and MCB, whereas the Sagaing fault separates the Shan Plateau from the MCB (Fig. 1a).
3 Historical Seismicity of the Region
NEI and its adjacent countries have experienced several historical large earthquakes (Seebar and Armbruster 1981; Molnar and England 1990; Rahman 2012). It is believed that these earthquakes are associated with subduction in the IBR (Le Dain et al. 1984; Satyabala 2002). Some of the significant historical interface subduction earthquakes in NEI and its adjacent countries are described below.
The Srimangal earthquake occurred on 7 July 1918, and its Mw and focal depth were 7.6 and 14 km, respectively (Fig. 1b; United States Geological Survey (USGS)). The worst affected area was the southern Sylhet District in Bangladesh and its adjoining northern state of Tripura in NEI. The origin of this earthquake was the Sylhet fault (Tiwari 2002).
The Tagaung earthquake (Mw 8.0) occurred on 12 September 1946 in Myanmar with a focal depth of 15 km (Fig. 1b; USGS). Landslides and enormous land fissures developed due to the ground shaking, and a few people were killed. Cracks were observed on the ground in many places. Several buildings and pagodas collapsed in Htichaing, Kawlin, Tagaung and Thabeikyn (Aung 2015). The Sagaing fault was assigned as the origin of this earthquake (Aung 2015; Hurukawa and Maung 2011).
One of the most disastrous earthquake (Mw 8.7) in NEI occurred on 15 August 1950. Its focal depth was 29 km (Fig. 1b; USGS). Tremors were felt throughout NEI. During this earthquake, 1520 peoples were killed, and there was mass destruction of property, livestock, buildings and roads. Forty to fifty percent of wildlife perished over the affected areas. Ground fissures and cracks were observed in many places, from which water and sand spouted out, and landslides were reported in many locations. The effects of this earthquake even diverted some rivers in the region (Tiwari 2002). The Po Chu fault was assigned as the causative fault for this earthquake (Ben Menahem et al. 1974; Ni and York 1978).
Aside from the abovementioned earthquakes, several other high-magnitude interface subduction earthquakes have occurred in NEI, including the 1930 Dhubri (Mw 7.1), 1931 Kamaing (Mw 7.6), 1956 Sagaing (Mw 6.8), 1984 Cachar (Mw 6.0) and 2009 Bhutan (Mw 6.3) earthquakes, which are shown in Fig. 1b (USGS; Tiwari 2002; Hurukawa and Maung 2011; Kayal et al. 2010; Aung 2015).
Steckler et al. (2016) suggested that there is a possibility of a magnitude Mw 8.2–9.0 earthquake occurring in NEI and its adjacent countries. With rapid population growth and large infrastructure development in NEI, the region is becoming more and more vulnerable to seismic threats. Considering the past seismicity and high seismic threat of future earthquakes in NEI, it is necessary to conduct seismic hazard mitigation for NEI and its adjacent countries.
4 Data Acquisition
In this study, a database of interface strong motion records for NEI and its adjacent countries was compiled. In total, there are 88 strong motion records for 12 interface earthquakes (Table 1). These strong motion records were compiled from the National Earthquake Information Center (NEIC) (https://www.usgs.gov/products/data-and-tools/real-time-data), COSMOS Virtual Data Center (https://strongmotioncenter.org/vdc/scripts/earthquakes.plx), International Seismological Center (ISC) (http://www.isc.ac.uk/iscbulletin/search/catalogue), Indian Meteorological Department (IMD) (https://seismo.gov.in/MIS/riseq/earthquake), European Mediterranean Seismological Center (EMSC) (https://www.emsc-csem.org/Earthquake/significant_earthquakes.php) and Incorporated Research Institutions for Seismology (IRIS) (http://ds.iris.edu/seismon/zoom/index.phtml?rgn=S_SE_Asia).
5 Ground Motion Simulation Model
5.1 Point-Source Model
Strong motion records are limited for NEI and its adjacent countries. It will be difficult to develop a new ground motion model for this region with these sparse recorded events. Thus, we used Boore's (1983, 2003) stochastic point-source model for simulation of synthetic ground motion data sets to develop our GMM. This model was used by Atkinson and Silva (2000), Iyengar and Raghukanth (2004), Yenier and Atkinson (2014), and Chhangte et al. (2020) for magnitude Mw up to 8.0 and by Singh et al. (2016) up to Mw 8.5.
The point-source stochastic model (Boore 1983, 2003) is presented below.
where A(f) is the Fourier amplitude spectrum of ground acceleration, C is a scaling factor, S(f) represents the source spectral function (Brune 1970, 1971), D(f) corresponds to the diminution function characterizing the attenuation for the region, P(f) is a filter for shaping acceleration amplitudes beyond a high cutoff frequency (fm), F(f) represents the site amplification function (Boore 1996) and the F(f) value is unity at a hard rock level.
The widely used source spectral function is the single-corner frequency model of Brune (1970) and can be expressed as
where fc is the corner frequency in Hz and M0 is the seismic moment in dyne/cm. The relation between fc and stress drop (∆σ) in bars (Boore 2003) is
where VS represents shear wave velocity for the specified region in km/s. The diminution factor D(f) can be expressed as (Boore 2003)
where G represents the geometric spreading factor and the second term of D(f) represents the anelastic attenuation. The parameter R from Eq. (4) is hypocentral distance in km and Q(f) is the quality factor of the region defined by Boore (2003) which can be expressed as follows
where the scaling constant Q0 characterizes heterogeneities in the medium and η is related to the seismic activity in the region. Q0 is the Q value at f = 1.0 Hz, and η gives the frequency dependence of Q(f). The parameters Q0 and η in the above equation are calculated from recorded seismic events.
The high-frequency cutoff filter in the above model (Boore 1983, 2003) is expressed as
where the parameter κ represents the kappa factor to reduce the high-frequency amplitudes above some threshold frequency and characterizes the near-surface attenuation (Anderson and Hough 1984).
The scaling factor (C) is expressed as
where the parameter \(\langle R_{\theta \Phi } \rangle\) signifies the radiation coefficient averaged over an appropriate range of azimuths and take-off angles, and is assumed to be 0.48–0.64 for shear waves, and ρ represents the density of the earth crust at the focal depth, assumed to be 2.8 g/cm3 in this study. The coefficient \(2\surd 2\) in the above equation is the product of the free-surface site amplification and partitioning of energy in orthogonal directions (Boore 2003).
6 Input Parameters for the GMM
In the ground motion simulations, we calculated and fixed the limit of various seismic input parameters suitable for NEI and its adjacent countries; the parameters are presented below:
6.1 Focal Depth
In total, there are 12 recorded interface subduction zone earthquake events in NEI and its adjacent countries; the events are presented in Table 1. It is observed from Table 1 that the focal depth for these earthquakes varies from 10 to 50 km (Table 1). Hence, we fixed the range of focal depth from 10 to 50 km for NEI and its adjacent countries in the development of the GMM for interface subduction earthquakes.
6.2 Site Parameters
The National Earthquake Hazards Reduction Program (NEHRP) has specified different site classes of A to F based on VS30, the time-averaged shear-wave velocity in the top 30 m. Rahman (2012) studied the site class of the recording stations in NEI and found that most of the recording stations in NEI are of site class C. He estimated the average kappa value as 0.06 ± 0.012 s for this site class based on the past recorded events in NEI. Rahman (2012) also stated that only three recording stations were located in site class E or F, and he calculated the average kappa for these soil sites as 0.08 s. It is not possible to develop a GMM due to scarcity of strong motion records for site class C in NEI or any other site class.
Hence, we developed a GMM corresponding to hard rock level (VS30 as 2800 m/s) similar to models developed for the Central and Eastern United States (e.g., Campbell 2003; Atkinson 2004; Tavakoli and Pezeskh 2005). The greatest advantage is that ground motions at a hard rock level (VS30 as 2800 m/s) can be scaled to site classes A to F using suitable site coefficients. In NEI, all types of site classes from A to F are available. Therefore, we can used our present model conveniently for all A to F site classes which will be helpful in estimating seismic hazard in the whole region. Site coefficients for all site classes A to D are available for NEI (Singh et al. 2016).
However, information on the kappa for hard rock in NEI is not available. Tavakoli and Pezeshk (2005) estimated that the kappa value at the bedrock level is 0.006 s for eastern North America. Similarly, Campbell (2003) has also calculated kappa value as 0.006 s for eastern North America, appropriate for hard rock corresponding to VS30 2800 m/s. Based on this, the kappa value for the hard rock level is fixed as 0.006 s for NEI in our model for the ground motion simulations based on the assumption that hard rock in NEI and Eastern North America are the same.
6.3 Geometrical Spreading Factor
Raghukanth and Somala (2009) studied the modeling of strong motion data both for crustal and subduction zone earthquakes in NEI. They used the following geometrical spreading factor (G) for the Indo-Burma Region (IBR) which is valid for interface subduction zone earthquakes of NEI
Raghukanth and Somala (2009) used Eq. (8) for the geometrical spreading factor for a subduction zone earthquake in NEI, which is also the focus area of this study. Singh et al. (2016) also used the same geometrical spreading factor in Eq. (8) for the crustal earthquakes in NEI.
Based on this study, we used the same geometrical spreading factor of Raghukanth and Somala (2009) and Singh et al. (2016) to develop our GMM for interface subduction zone earthquakes of NEI and its adjacent countries.
6.4 Quality Factor (Q)
Quality factor (Q) is a key parameter to develop a stochastically simulated GMM. Q is frequency-dependent and increases with frequency as shown in Eq. (5) (Rahman 2012; Raghukanth and Somala 2009; Mitra et al. 2006). The parameters Q0 and η in Eq. (5) have a significant impact in the GMM. Generally, a seismically active region has a high η and low Q0 value, whereas a tectonically stable region has a low η and high Q0 (Kumar et al. 2005; Singh et al. 2004; Mandal and Rastogi 1998). The Q value gives the shape of the high-frequency spectrum of the Fourier amplitude spectra (FAS) of acceleration (Motezedian and Atkinson 2005; Sokolov et al. 2002; Raoof et al. 1999).
In this study, Q value for each of the strong motion records for the interface events (Table 1) at the various recording stations were calculated separately by applying regression analysis. After substituting all of the terms from Eqs. (2) to (8) into Eq. (1), we can rewrite Eq. (4) as follows
where \(\overline{S(f)}\) = CS(f)P(f)F(f).
By taking log10 on both sides of Eq. (9), we obtain
The intercept in Eq. (10) is given by the source term log10 \(\overline{S(f)}\) and the slope by inverse (1/Q) term. For each earthquake, we plot log10A(f) + (1 or 5)log10R versus R and perform a linear regression analysis to determine Q at each frequency.
Equation (5) can be rewritten as
Linear regression is carried out over log10Q(f) versus log10f to determine the values of Q0 and η from the intercept and the slope of the regression line, respectively. In this study, the horizontal components (QLT) value of the quality factor is calculated, which is obtained by taking the average of the longitudinal and transverse components of the recorded strong motion accelerogram.
log10A + (1/5)log10R versus R is plotted in Fig. 2a–f for the horizontal components of Q(f) at the frequency of 0.2 Hz for 10 September 1986, 18 May 1987, 6 February 1988, 8 May 1997, 9 December 2004 and 3 January 2017 earthquakes, respectively. This figure illustrates suitable Q results with mean value of ± σ1 (standard deviation). The slope of the line is an estimate of Q at that particular frequency.

Variation of log10A + Y/Y1 versus R (km) for the horizontal components at 0.2 Hz for a 10 September 1986, b 18 May 1987, c 6 February 1988, d 8 May 1997, e 9 December 2004 and f 3 January 2017. Y = log10R (R < 100 km) and Y1 = 5log10R (R > 100 km)
The dependence of Q on f is given in Fig. 3a–f for the horizontal components of 10 September 1986, 18 May 1987, 6 February 1988, 8 May 1997, 9 December 2004 and 3 January 2017 earthquakes, respectively. We calculated Q(f) for 12 recorded events which are given in Table 2.

Weighted average of the log10Q versus log10f for the horizontal component for a 10 September 1986, b 18 May 1987, c 6 February 1988, d 8 May 1997, e 9 December 2004 and f 3 January 2017
The average of the horizontal component of Q for all 12 interface earthquakes for NEI is calculated as
with the standard deviation (σ1) values as (14.4 (Q0), 0.042 (η)).
Rahman (2012) calculated the frequency-dependent Q(f) for subduction earthquakes in NEI. He stated that for subduction zone earthquakes in NEI, Q0 value ranges from 178.59 to 193.50, and η value varies from 0.93 to 0.97. Raghukanth and Somala (2009) also estimated an average Q(f) for NEI subduction zone earthquakes as Q(f) = (434 ± 9)f(0.72±0.01) with standard deviation σ1 as 0.3, based on four strong motion records in NEI. Mitra et al. (2006) also estimated Q(f) for the Indian platform for a few events applying regression analysis.
We estimated Q for all the strong motion records of interface subduction earthquakes in NEI, which are presented in Table 2. It was observed from the 12 recorded interface subduction zone earthquakes (Table 2), Q0 value for the interface subduction zone earthquakes in NEI varies from 141 to 196, and η value varies from 0.92 to 0.99.
6.5 Stress Parameters (Δσ)
Fourier amplitude spectra (FAS) of ground motion at a site (Boore 1983; 2003) can be expressed from Eq. (1). Hence, stress parameters (Δσ) can be found by substituting Eq. (4) for fc into A(f) of Eq. (4), and we can get the following expression
where M0 is the seismic moment which is calculated as: log10(M0) = 1.5 Mw + 16.05 (Hanks and Kanamori 1979).
Strong motion records in NEI are available for 91 frequencies (f) from 0.0667 to 25 Hz. Vs and ρ are the shear-wave velocity (3.6 km/s) and density (2.8 gm/cc) at the bedrock level, respectively, in Eq. (13).
The site amplification function, F(f), for the NEHRP site class C is calculated in the present study for all the 91 frequencies for each recording station with respect to rock using Boore’s (1996, 2003) SMSIM Fortran program with the rock kappa factor κ at 0.006 s, shear wave velocity Vs as 580 m/s and κ as 0.0545 s for the site class C recording stations in NEI (Rahman 2012). The site amplification function F(f) for the NEHRP site class C is shown in Fig. 4.

Site amplification function F(f) for NEI interface subduction zone
From Eq. (13), for given values of R and 91 frequencies for all the recording stations for a past event in NEI, theoretical Fourier spectral values A(f) are calculated for the various Δσ values of 10–400 bars. The frequency content of each theoretically calculated Fourier spectrum (TCFS) is compared with the observed Fourier spectrum (OFS). Residuals for all 91 frequencies within a range of 0.0667–25 Hz over all records are calculated for site class C.
By taking averages of all frequencies, the mean square error (MSE) is found from OFS and TCFS as follows
where n is the total number of frequencies for all the recording stations for each past event.
The MSE between the recorded OFS and the TCFS is calculated with respect to various Δσ values using Eq. (14). MSE between the recorded OFS and TCFS is minimized by plotting MSE with respect to Δσ values. The Δσ value corresponding to the minimum MSE value is the desired stress factor for the given past earthquake. Equation (14) is valid for estimating stress drop for a particular event in a region as all others source parameters used in Eqs. (16) and (22) are the same in NEI.
We estimated stress parameters for all 12 recorded NEI interface events presented in Table 1. The MSE versus stress drops for the earthquakes on 10 September 1986, 18 May 1987, 6 February 1988, 8 May 1997 earthquakes, 9 December 2004 and 3 January 2017 are presented in Fig. 5a–f, respectively. It is observed that the MSEs are minimum at the Δσ values of 249, 269, 253, 155, 173 and 181 bars, respectively. For these corresponding stress parameter values, the distributions of residuals at all 91 frequencies with respect to hypocentral distances are shown in Fig. 6a–f for 10 September 1986, 18 May 1987, 6 February 1988, 8 May 1997, 9 December 2004 and 3 January 2017 earthquakes, respectively. It is observed from Fig. 6a–f that the residuals are unbiased with respect to hypocentral distances. The distribution of residual versus hypocentral distance for Δσ value is plotted in Fig. 6a–f to rule out a trend of residuals with respect to the hypocentral distance.

Variation of the MSE with Δσ values for the earthquakes on a 10 September 1986, b 18 May 1987, c 6 February 1988, d 8 May 1997, e 9 December 2004 and f 3 January 2017

Distribution of the residuals for the calculated Δσ value of earthquakes on a 10 September 1986, b 18 May 1987, c 6 February 1988, d 8 May 1997, e 9 December 2004 and f 3 January 2017
Rahman (2012) calculated Δσ for subduction earthquakes in NEI. He stated that for subduction zone earthquakes in NEI, Δσ values ranges from 124 to 180 bars. Raghukanth and Somala (2009) also estimated Δσ for subduction zone earthquakes for NEI ranging from 123 to 282 bars.
We estimated Δσ for all the strong motion records of interface subduction earthquakes in NEI, as presented in Table 3. It is observed from Table 3 that for the interface earthquakes, the Δσ values vary from 127 to 274 bars. Based on these analyses, we fixed the range of Δσ values from 110 to 280 bars for the ground motion simulations in Table 4.
We applied a bootstrap method to define the uncertainty associated with the attenuation parameters. We randomly selected 90% of these earthquake records, and we duplicated some of the data to keep almost the same amount of total data computed as in the original data set (Singh et al. 2016; Drouet and Cotton 2015). We repeated this operation 150 times, and for each data set, we ran the inversion method of Drouet et al. (2010). Ultimately, we generated 150 sets of parameters from which we can draw distributions that represent the observed variability, which is shown in Fig. 7a, b. The anelastic model parameters obtained using a bootstrap technique are log10(Q0) as 2.29 ± 0.17, γ = 0.98 ± 0.008 and η = 0.91–0.99 which are presented in Table 4. Attenuation parameters are not independent, and correlation should be taken into account, but for the simplicity and to remain conservative, we assumed independent attenuation parameters (Drouet and Cotton 2015).

Distribution of the attenuation parameters for NEI interface earthquakes after applying a bootstrapping method to the results and associated Gaussian models: a γ and b log10(Q0)
6.6 Path Duration (T p)
In ground motion simulation, time duration (Td) also plays an important role (Boore 2003), and it is defined as the sum of a source duration (Ts) and path duration (Tp) in addition to the other effects related to different site conditions or complex source effects such as directivity (Kempton and Stewart 2006). In the present study, we estimated Tp using both the acceleration and velocity database of interface earthquakes of NEI applying two criteria, 5–75% and 5–95% of total energy (Singh et al. 2016). We computed the integral of the square acceleration and velocity within a time window from the shear-wave onset and the shear-wave onset plus 50 s (Drouet and Cotton 2015; Singh et al. 2016). We deducted the source duration (1/fc) to obtain the value of path duration.
It is observed that the path durations computed from 5 to 75% energy criteria are shorter than those obtained from 5 to 95% energy criteria. It is observed from Fig. 8 that a two-segment linear model is best fitted over an average data per distance bin, with a kink point of 60 km for 5–75% energy criteria and more than 60 km for 5–95% energy criteria.

The consistency between the input and output path duration is checked based on Drouet and Cotton (2015) and Singh et al. (2016) for different sets of magnitude Mw 5.0–9.0 and distance 30–300 km. We found that the output path duration is equal to 0.92–0.95 times the input path duration based on the consistency of the actual strong motion records for interface earthquakes of NEI. So we adjusted our input model based on 5–95% energy criteria by 1.05 based on Drouet and Cotton (2015) and Singh et al. (2016). Our results compare well to the results obtained by Drouet and Cotton (2015) and Singh et al. (2016).
The final path duration model for NEI based on strong motion records of interface earthquakes is presented below and also shown in Fig. 8:
The ranges of seismic input parameters used for the ground motion simulations for interface earthquakes in NEI and its adjacent countries are presented in Table 4.
After estimating the region-specific seismic input parameters based on the past NEI interface strong motion records and its adjacent countries, ground motions are simulated for a smaller range of Mw (4.5–6.5) and hypocentral distance (30–300 km) corresponding to VS30 as 2800 m/s using Boore’s (1983, 2003) point-source model. In total, there are 500 scenario pairs of magnitude and distance bins from which 50,000 ground motions are simulated for smaller magnitude to develop the GMM for NEI interface earthquakes and its adjacent countries. For each scenario, 100 sets of ground motions are simulated and presented in Table 5 (Iyengar and Raghukanth 2004; Singh et al. 2016).
6.7 Finite-Fault Model
For finite-fault model simulations, a fault is divided into N number of sub-faults (N = nl*nw, nl and nw are the sub-faults along the fault’s length and width, respectively). The respective sub-faults are each treated as point-source seismological models. In this study, we used Boore’s (1983, 2003) model for the analysis, which is shown later. The acceleration spectrum of each sub-fault is modeled as a point source with ω2 frequency shape (Brune 1970, 1971; Boore 1983, 2003). For the finite-fault simulation, the Fourier amplitude spectrum for each of the ijth sub-faults is replaced by Aij(f), f0ij, Rij and M0ij, where they are the acceleration spectrum of shear wave, corner frequency, hypocentral distance and the seismic moment of the ijth sub-faults. The corner frequency of the sub-fault is given as (Motezedian 2006):
where M0ave (dyne/cm) is the average seismic moment of the ijth sub-fault.
For identical sub-faults, the sub-fault moment is influence by the ratio of sub-fault area to the total fault area (M0ij = M0/N, M0 being the total fault moment). If there are nonidentical sub-faults, each sub-fault's seismic moment is given as (Beresnev and Atkinson 1998a, b; Motezedian and Atkinson 2005)
where Sij is the relative slip weight of the ijth sub-fault. The sub-fault's ground motions are then summed up in a time domain to obtain spectral acceleration of the entire fault, A(t)
where Δtij is the relative time delay for the radiated wave from the ijth sub-fault to reach the observation point. This approach was implemented in the FINSIM (stochastic FINite fault SIMulation; Beresnev and Atkinson 1998a) in the calculation of corner frequency and seismic moment of each sub-fault.
The dimensions of each fault located in NEI and its adjacent regions are calculated based on Strasser et al. (2010). Region-specific seismic input parameters of NEI are used in the program FINSIM for finite-fault model and presented in Tables 6 and 7, respectively. We used 95 numbers of total points for the regression analysis (Strasser et al. 2010).
In finite-fault modeling for NEI, we used the following equation to estimate the size of the sub-fault valid for interface subduction earthquakes (Strasser et al. 2010);
where L, W and A are the length, width and area of the fault, respectively. The constants a1 to a3 and b1 to b3 are regression coefficients in Eqs. (19)–(21) calculated by Strasser et al. (2010) for interface subduction earthquakes; they are presented in Table 8.
We simulated higher-magnitude earthquakes for Mw (6.5–9.0) using finite-fault modeling. In this study, the regression coefficients in Eqs. (22–24) are calculated by combining 50,000 simulated data points based on a point-source model and the simulated data obtained from finite-fault modeling for higher-magnitude earthquakes of Mw (6.5–9.0).
6.8 Ground Motion Model for a Subduction Zone at a Hard Rock Level
Ground motion parameters are dependent on the magnitude (Mw), hypocentral distance (R) and others region-specific seismic parameters. We adopted the following functional GMM form used by Abrahamson et al. (2016) for global interface subduction earthquakes.
where θ1–θ11 = regression coefficients.
For NEI, FFABA = 0 considering NEI as an unknown site.
where C1 = 7.8. The values of ∆C1 are period-dependent variations based on the size of the earthquake.
Here, VS30 = 2800 m/s.
The regression coefficients in Eq. (22) are presented in Tables 9 and 10.
The regression coefficients θ1–θ11 are calculated using a two-stage regression method (Joyner and Boore 1981) to minimize the errors in calculating regression coefficients. Sensitivity analysis is also carried out to check the errors for the various seismic input parameters used in this model.
Site coefficient (FS) for all sites classes can be expressed as follows (Iyengar and Raghukanth 2004; Singh et al. 2016)
where Ybr is the bed rock acceleration and σs are the standard deviations which were already calculated for NEI for site classes A to D (Singh et al. 2016).
In Eq. (25), a1 and a2 are the regression coefficients, which are calculated for all site classes for NEI by Singh et al. (2016) for different time periods. We scaled these site coefficients to the regression coefficients in Tables 9 and 10 for different time periods in conversion to site classes A to D with respect to bed rock acceleration (Singh et al. 2016). Accordingly, we used the site coefficient factors in conversion from hard rock level to site class C in our GMM.
7 Sensitivity Analysis
In this paper, the GMM for the NEI subduction zone earthquakes is developed on hard rock level corresponding to VS30 of 2800 m/s. Our prediction equation is dependent on the various region-specific seismic input parameters (Table 4). To date, we cannot predict the exact location and specific time of occurrence of earthquakes as they are random in nature. Hence, the physics and occurrence of earthquakes are dependent on various input parameters which uncertain. To address this issue, in our model, we considered all these input parameters as uniform distribution (Iyengar and Raghukanth 2004; Singh et al. 2016). Our GMM is based on the ground motion simulations, and it will widely vary depending on the variation of these input parameters. Based on this, sensitivity analysis was performed to check the bias of the GMM corresponding to individual seismic input parameters. After performing the sensitivity analysis, we considered necessary precautionary measures in selecting the input parameters for our model.
In the sensitivity analysis, we checked the impact of the different parametric uncertainties in our model. We performed a sensitivity analysis for focal depth, cutoff frequency, stress drop, radiation pattern, anelastic attenuation, geometric attenuation and time duration. Finally, in our model, total uncertainties were checked by sensitivity analysis.
In the sensitivity analysis, we calculated the standard deviation of our model for each input parameter for different spectral periods and obtained the highest value of standard deviation that can occur in the model (Table 11). Drouet and Cotton (2015) also performed their French Alps GMM sensitivity analysis on empirical models for Europe and Japan, and stochastic models for the United Kingdom and Switzerland. Singh et al. (2016) carried out sensitivity analysis for NEI to check the bias of their model developed for crustal earthquakes in NEI. Based on their study, they concluded that standard deviations spread considerably from 0.6 to 1.0 in natural logarithm units. In our model, the spread of standard deviations for the input parameters varied from 0.05 to 0.52 (Table 11). It is observed from Table 11 that standard deviations due to the input parameters, namely focal depth, cutoff frequency, stress drop, radiation pattern, anelastic attenuation, geometric attenuation and time duration, are very small. This indicates that our model is not biased with respect to these region-specific input parameters. We neglected the uncertainty of site coefficient and κ value in the sensitivity analysis in our model. Variation of standard deviations will be large if we considered two input parameters such as site amplification and κ value in the sensitivity analysis. Therefore, we treated these two uncertainties separately. We fixed the value of kappa as 0.006 s. We also used the site effects coefficients calculated by Singh et al. (2016) for NEI in our GMM.
8 Comparison with Other GMMs
A GMM for interface subduction zone earthquakes for NEI and its adjacent countries has not yet been developed. Thus, to validate our GMM, we checked our model with the available recorded site class C events and also compared it with Gregor et al.'s (2002) GMM for Cascadia megathrust interface earthquakes and Abrahamson et al.'s (2016) global interface earthquakes.
Our GMM is developed on a hard rock level corresponding to VS30 = 2800 m/s which is scaled to site class C (VS30 ≈ 400 to 500 m/s) using site coefficients calculated by Singh et al. (2016). Gregor et al. (2002) developed a GMM corresponding to average VS30 ≈ 363 m/s which is also categorized as site class C. Abrahamson et al. (2016) developed a GMM as a function of VS30, and we used Abrahamson et al.'s (2016) model corresponding to average VS30 ≈ 560 m/s for site class C in our GMM comparison.
In this study, we checked our model for the interface subduction zone earthquakes with the strong motion records for Mw 5.7 on 3 January 2017, Mw 5.4 on 9 December 2004, Mw 6.0 on 8 May 1997, Mw 5.8 on 6 February 1988, Mw 5.9 on 18 May 1987 and Mw 5.3 on 10 September 1986 in Fig. 9a–f, respectively. It is observed from Fig. 9a–f that our model is not biased with respect to both magnitude and hypocentral distance. We evaluated residuals, mean residuals ± standard deviation for peak ground acceleration (PGA) with respect to magnitude which is shown in Fig. 10a, b based on point-source and finite-fault simulation models. From Fig. 10a, b, it is observed that residuals for PGA are not biased for all ranges of magnitude for both simulation models. We also computed residuals for PGA and spectral acceleration (Sa) at 2.0 s using a point-source model with respect to hypocentral distance for the available strong motion records of subduction zone interface earthquakes of NEI which are shown in Fig. 11a, b, respectively. Similarly, residuals for PGA and spectral acceleration (Sa) at 2.0 s are calculated using a finite-fault simulation model, as shown in Fig. 11c, d. It is seen from Figs. 10a, b and 11a–d that residuals of PGA and Sa with respect to magnitude and hypocentral distance are not biased.

Predicted and recorded PGA values at site class C for a Mw 5.7 on 3 January 2017, b Mw 5.4 on 9 December 2004, c Mw 6.0 on 8 May 1997, d Mw 5.8 on 6 February 1988, e Mw 5.9 on 18 May 1987, and f Mw 5.3 on 10 September 1986. Error/vertical bar represents the standard deviations of the GMM

Distribution of PGA residuals with respect to Mw for a point-source and b finite-fault models. Here, the residuals for each earthquake event are shown with a black vertical line with three horizontal bars showing the ranges of average ± standard deviations of residuals

Distribution of the residuals of a PGA, b 2.0-s Sa for a point-source model; c PGA, d 2.0-s Sa for a finite-fault model with respect to hypocentral distance (km)
The combined data set of the point-source model for Mw (4.5–6.5) and finite-fault modeling for Mw (6.5–9.0) was named the “Combined Model,” as shown in Figs. 12, 13 and 14. We also compared our Combined Model with the finite-fault modeling in Figs. 12, 13 and 14.



We compared our model for the interface subduction zone earthquakes with the GMM of Gregor et al. (2002) and Abrahamson et al. (2016) for PGA with respect to hypocentral distance for magnitude Mw 5.5, 6.5, 7.0, 7.5, 8.0 and 8.5, as shown in Fig. 12a–f. We also compared Sa at 0.2 s for Mw 5.5, 6.5, 7.0, 7.5, 8.0 and 8.5 with respect to hypocentral distance, as shown in Fig. 13a–f. It is seen from Figs. 12 and 13 that Gregor et al.'s (2002) GMM gives higher Sa value than the present GMM. Our GMM gives higher value than Abrahamson et al.'s (2016) model.
We also compared our GMM for Sa at different time periods with the GMM of Gregor et al. (2002) and Abrahamson et al. (2016) for Mw 5.5, 6.5, 7.0, 7.5, 8.0 and 8.5 at hypocentral distances of 50, 50, 100, 100, 150 and 150 km, as shown in Fig. 14a–f, respectively. It is observed that our GMM gives lower values than the Gregor et al. (2002) and higher values than Abrahamson et al. (2016).
We compared our model both for point-source and finite-fault simulation models in Figs. 12, 13 and 14. It is observed from Figs. 12, 13 and 14 that ground motion parameters in a point-source seismological model give higher values as compared to a finite-fault simulation model. Point-source and finite-fault models differ in geometry of the source, definition and application of duration and normalization of finite sub-source summations (Atkinson et al. 2009). Boore (2009) stated that ground motion parameters simulated in a point-source model for a small and large earthquakes at close and far distances are substantially higher than the finite-fault simulation model for all frequencies.
It is observed from Figs. 12, 13 and 14 that our GMM based on both point-source and finite-fault models gives less PGA and Sa values as compared to Gregor et al.'s (2002) GMM. These differences may arise due to high value of VS30 used for our GMM. It is also observed from Figs. 12, 13 and 14 that PGA and Sa values in our model provide higher value in comparison to Abrahamson et al.'s (2016) GMM. This is due to the fact that in our model, we ignored forearc and backarc effects as these values are unknown for NEI and its adjacent countries. The averaged VS30 value for site class C in our GMM is also lower than that in Abrahamson et al.'s (2016) GMM. We expect the differences of ground motion parameter in the three GMMs are due to variations of region-specific seismic input parameters used to develop the model, such as quality factor, stress parameters and kappa factors.
9 Conclusions
In this study, we developed a new GMM for interface subduction zone earthquakes for NEI and its adjacent countries based on both point-source and finite-fault simulation models. Our GMM is based on 50,000 simulated ground motions for magnitude Mw 5.0–9.0 and hypocentral distances of 30–300 km. These ground motion samples are stochastically simulated based on region-specific seismic input parameters for NEI and its adjacent countries using Boore's point source model. Ground motions are also simulated based on a finite-fault simulation model using FINSIM.
Our model is best fitted with respect to both magnitude and hypocentral distance, and it will provide realistic ground motion parameters in NEI. Our GMM will also be useful in estimating seismic hazard of NEI and its adjacent countries.
References
Abrahamson, N. A., Gregor, N., & Addo, K. (2016). BC Hydro ground motion prediction equations for subduction earthquakes. Earthquake Spectra, 32, 23–44.
Anderson, J. G., & Hough, S. E. (1984). A model for the shape of Fourier Amplitude spectrum of acceleration at high frequencies. Bulletin of Seismological Society of America, 74, 1969–1993.
Atkinson, G. M. (2004). Empirical attenuation of ground motion spectral amplitudes in southeastern Canada and the northeastern United States. Bulletin of Seismological Society of America, 94, 1079–1095.
Atkinson, G. M., Assatourians, K., Boore, D. M., Campbell, K., & Motazedian, D. (2009). A guide to differences between stochastic point-source and stochastic finite-fault simulations. Bulletin of Seismological Society of America, 99, 3192–9201.
Atkinson, G. M., & Boore, D. M. (2003). Empirical ground-motion relations for subduction zone earthquakes and their application to Cascadia and other regions. Bulletin of Seismological Society of America, 93, 1703–1729.
Atkinson, G. M., & Silva, W. (2000). Stochastic modelling of California ground motions. Bulletin of Seismological Society of America, 90(2), 255–274.
Aung, H. H. (2015). Myanmar earthquake history. Myanmar: Wathan Press Yangon.
Ben-Menahem, A., Aboudi, E., & Schild, R. (1974). The source of the great Assam earthquake-an intraplate wedge motion. Physics of the Earth and Planet Interiors, 9, 265–289.
Beresnev, I. A., & Atkinson, G. M. (1998a). FINSIM-A FORTRAN program for simulating stochastic acceleration time histories from finite faults. Seismological Research Letters, 69, 27–32.
Beresnev, I. A., & Atkinson, G. M. (1998b). Stochastic finite fault model of ground motions from the 1994 Northridge, California, earthquake: I, validation non rock sites. Bulletin of Seismological Society of America, 88, 1392–1401.
Beresnev, I. A., & Atkinson, G. M. (1999). Generic finite-fault model for ground motions prediction in eastern North America. Bulletin of Seismological Society of America, 89, 608–625.
Boore, D. M. (1983). Stochastic of high frequency ground motions based on seismological models of the radiated spectra. Bulletin of Seismological Society of America, 73, 1856–1894.
Boore DM (1996) SMSIM Fortran program for simulating ground motions from earthquakes: Version 1.0. U.S. Geological Survey Open File Report 96:80-A.
Boore, D. M. (2003). Simulation of ground motion using the stochastic method. Pure and Applied Geophysics, 160, 635–676.
Boore, D. M. (2009). Comparing stochastic point-source and finite source ground motion simulations: SMSIM and EXSIM. Bulletin of Seismological Society of America, 99, 3202–3216.
Bora, D. K., Skolov, V. Y., & Wenzel, F. (2016). Validation of strong-motion stochastic model using observed ground motion records in North-east India. Geomatics, Natural Hazards and Risks, 7, 565–585.
Brune, J. N. (1970). Tectonic stress and the spectra of seismic shear waves from earthquakes. Journal of Geophysical Research, 75, 4997–5009.
Brune, J. N. (1971). Correction. Journal of Geophysical Research, 76, 5002.
Campbell, K. W. (2003). Prediction of strong ground motion using the hybrid empirical method and its use in the development of ground-motion (attenuation) relations in Eastern North America. Bulletin of Seismological Society of America, 9, 1012–1033.
Chen, W. P., & Molnar, P. (1983). Focal depths of intracontinental and intraplate earthquakes and their implications for the thermal and mechanical properties of the lithosphere. Journal of Geophysical Research, 88, 4183–4214.
Chhangte, R. L., Rahman, T., & Wong, I. G. (2020). Ground motion model for deep intraslab subduction zone earthquakes of Northeastern India and adjacent regions. Bulletin of Seismological Society of America. https://doi.org/10.1785/0120200050.
Das, S., Gupta, I. D., & Gupta, V. K. (2006). A probabilistic seismic hazard analysis of North-east India. Earthquake Spectra, 22, 1–27.
Drouet, S., Cotton, F., & Guéguen, P. (2010). VS30, κ, regional attenuation and Mw from small magnitude events accelerograms. Geophysical Journal International, 182, 880–898.
Drouet, S., & Cotton, F. (2015). Regional stochastic GMPEs in low seismicity areas: Scaling and aleatory variability analysis—application to the French Alps. Bulletin of Seismological Society of America, 105, 1–20.
Goswami, H. C., & Sharma, S. K. (1982). Probabilistic earthquake expectancy in the northeast Indian region. Bulletin of Seismological Society of America, 72, 999–1009.
Gregor, N. J., Silva, W. J., Wong, I. G., & Youngs, R. R. (2002). Ground-motion attenuation relationships for Cascadia subduction zone megathrust earthquakes based on a stochastic finite-fault model. Bulletin of Seismological Society of America, 92, 1923–1932.
Gupta, I. D. (2010). Response spectral attenuation relations for in-slab earthquakes in Indo-Burmese subduction zone. Soil Dynamics and Earthquake Engineering, 30, 368–377.
Hanks, T. C., & Kanamori, H. (1979). A moment magnitude scale. Journal of Geophysical Research, 84, 2348–2350.
Hurukawa, N., & Maung, M. P. (2011). Two seismic gaps on the Sagaing Fault, Myanmar, derived from relocation of historical earthquakes since 1918. Geophysical Research Letters, 38, 1310–1314.
Iyengar, R. N., & Raghukanth, S. T. G. (2004). Attenuation of strong ground motion in peninsular India. Seismological Research Letters, 75, 530–539.
Joyner, W. B., & Boore, D. M. (1981). Peak horizontal Acceleration and velocity from strong motion records including records from the 1979, Imperial Valley, California earthquakes. Bulletin of Seismological Society of America, 71, 2011–2038.
Kayal, J. S., Arefiev, S., Baruah, S., Tatevossian, R., Gogoi, N., Sanoujam, M., et al. (2010). The 2009 Bhutan and Assam felt earthquakes (Mw 6.3 and 5.1) at the Kopili fault in the northeast Himalaya region. Geomatics, Natural Hazards and Risk, 3, 273–281.
Kempton, J. J., & Stewart, J. P. (2006). Prediction equations for significant duration of earthquake ground motions considering site and near-source effects. Earthquake Spectra, 22, 985–1013.
Kumar, A. V., Sangode, S. J., Kumar, R., & Siddaiah, N. S. (2005). Magnetic polarity stratigraphy of Plio-Pleistocene Pinjor formation(type locality), Siwalik group, NW Himalaya, India. Current Science, 88, 1453–1461.
Kundu, B., & Gahalaut, V. K. (2012). Earthquake occurrence processes in the Indo-Burmese wedge and Sagaing fault region. Tectonophysics, 524, 135–146.
Le Dain, A. Y., Tapponier, P., & Molnar, P. (1984). Active faulting and tectonics of Burma and surrounding regions. Journal of Geophysical Research, 89, 453–472.
Lin, P. S., & Lee, C. T. (2008). Ground-motion attenuation relationships for subduction-zone earthquakes in North-eastern Taiwan. Bulletin of Seismological Society of America, 98, 220–240.
Llenos, A. L., & McGuire, J. J. (2007). Influence of fore-arc structure on the extent of great subduction zone earthquakes. Journal of Geophysical Research. https://doi.org/10.1029/2007JB004944.
Mandal, P., & Rastogi, B. K. (1998). A frequency-dependent relation of Coda Qc for Koyna-Warna region, India. Pure and Applied Geophysics, 153, 163–177.
Mitra, S., Priestley, K., Bhattacharyya, A. K., & Gaur, V. K. (2005). Crustal structure and earthquake focal depths beneath North-East India and southern Tibet. Geophysical Journal International, 160, 227–248.
Mitra, S., Priestly, K., Gaur, V. K., & Rai, S. S. (2006). Frequency dependent Lg attenuation in the Indian platform. Bulletin of Seismological Society of America, 96, 2449–2456.
Molnar, P., & England, P. (1990). Surface uplift, uplift of rocks and exhumation of rocks. Geology, 18, 1173–1177.
Motazedian, D. (2006). Region-specific key seismic parameters for earthquakes in northern Iran. Bulletin of Seismological Society of America, 96, 1383–1395.
Motazedian, D., & Atkinson, G. (2005). Stochastic finite-fault model based on dynamic corner frequency. Bulletin of Seismological Society of America, 95, 995–1010.
Nandy, D. R. (1986). Geology and tectonics of Arakan Yoma—a reappraisal. Regional Congress on Geology, Mineral and Energy Resources of Southeast Asia Bulletin, 20, 137–148.
Nath, S. K., Thingbaijam, K. K. S., & Maiti, S. K. (2012). Ground-motion predictions in Shillong region, northeast India. Journal of Seismology, 16, 475–488.
Ni, J., & York, J. E. (1978). Late Cenozoic tectonics of the Tibetan plateau. Journal of Geophysical Research, 83, 5377–5384.
Ni, J. F., Guzman-Speziale, M., Beis, M., Holt, W. E., Wallace, T. C., & Seager, W. R. (1989). Accretionary tectonics of Burma and the three-dimensional geometry of Burma subduction zone. Geology, 17, 68–71.
Parvez, I. A., & Ram, A. (1997). Probabilistic assessment of earthquake hazards in the north-east Indian Peninsula and Hindukush region. Pure Applied Geophysics, 149, 731–746.
Raghukanth, S. T. G., & Somala, S. N. (2009). Modeling of strong-motion data in North-eastern India: Q, stress drop, and site amplification. Bulletin of Seismological Society of America, 99, 705–725.
Rahman, T. (2012). Seismological model parameters for the north-eastern and its surrounding region of India. Earthquake Science, 25, 323–338.
Raoof, M., Hermann, R., & Malagnini, L. (1999). Attenuation and excitation of three components ground motion in Southern California. Bulletin of Seismological Society of America, 89, 888–902.
Satyabala, S. P. (2002). The historical earthquakes of India. International Geophysics, 81, 797–798.
Satyabala, S. P. (2003). Oblique convergence in the Indo-Burma (Myanmar) subduction region. Pure and Applied Geophysics, 160, 1611–1650.
Seebar, L., & Armbruster, J. G. (1981). Great detachment earthquakes along the Himalayan arc and long-term forecasting. American Geophysics Union, 4, 259–277.
Sil, A., Sitharam, T. G., & Haider, S. T. (2015). Probabilistic models for forecasting earthquakes in the Northeast Region of India. Bulletin of Seismological Society of America. https://doi.org/10.1785/0120140361.
Singh, N. M., Rahman, T., & Wong, I. G. (2016). A new ground motion prediction model for north-eastern India crustal earthquakes. Bulletin of Seismological Society of America, 106, 1282–1297.
Singh, S. K., Ordaz, M., Dattatrayam, R. S., & Gupta, H. K. (1999). A spectral analysis of the 21 May 1997, Jabalpur, India earthquake (Mw 5.8) and estimation of ground motion from future earthquakes in the Indian shield region. Bulletin of Seismological Society of America, 89, 1620–1630.
Singh, S. K., Garcia, D., Pacheco, J. F., Valenzuela, R., Bansal, B. K., & Dattatrayam, R. S. (2004). Q of the Indian shield. Bulletin of Seismological Society of America, 94, 1564–1570.
Sokolov, V. Y., Loh, C. H., & Wen, K. L. (2002). Comparision of the Taiwan Chi-earthquake strong motion data and ground motion assessment based on spectral model from smaller earthquakes in Taiwan. Bulletin of Seismological Society of America, 92, 1855–1877.
Steckler, M. S., Mondal, D. R., Akhter, S. H., Seeber, L., Feng, L., Gale, J., et al. (2016). Locked and loading megathrust linked to active subduction beneath the Indo-Burman ranges. Nature Geoscience, 9, 615.
Strasser, F. O., Arango, M. C., & Bommer, J. J. (2010). Scaling of the source dimensions of interface and intraslab subduction zone earthquakes with moment magnitude. Seismological Research Letters, 6, 941–950.
Tavakoli, B., & Pezeshk, S. (2005). Empirical stochastic ground motion prediction for eastern North America. Bulletin of Seismological Society of America, 95, 2283–2296.
Tichelaar, S. W., & Ruff, L. J. (1993). Depth of seismic coupling along subduction zones. Journal of Geophysical Research, 98, 2017–2038.
Tiwari RK (2002) Status of seismicity in the North-eastern India and earthquakes disaster mitigation. ENVIS Bulletin 10(1): Himalayan Ecology.
Yenier, E., & Atkinson, G. M. (2014). Equivalent point-source modeling of moderate-to-large magnitude earthquakes and associated ground-motion saturation effects. Bulletin of Seismological Society of America, 104(3), 1458–1478.
Youngs, R. R., Silva, W. J., & Humphrey, J. R. (1997). Strong ground motion attenuation relationships for subduction zone earthquakes. Seismological Research Letters, 69, 58–73.
Acknowledgements
We would like to convey our gratitude to the Chief Editor, Fabio Romanelli, for giving us the opportunity to improve our manuscript based on the precious technical suggestions. We are also thankful to the potential reviewers for their valuable technical suggestions to improve our manuscript.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Rahman, T., Chhangte, R.L. A New Ground Motion Model (GMM) for Northeast India (NEI) and Its Adjacent Countries for Interface Earthquakes Considering Both Strong Motion Records and Simulated Data. Pure Appl. Geophys. 178, 1021–1045 (2021). https://doi.org/10.1007/s00024-021-02677-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00024-021-02677-3