
Abstract
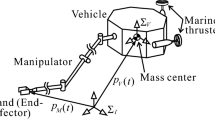
Development of a robust autonomous Underwater Robotic Vehicle (URV) is a key element to the exploitation of marine resources. An accurate dynamic model is important for both controller design and mission simulation, regardless of the control strategy employed. In this paper, a dynamic model for an underwater vehicle with an n-axis robot arm is developed based on Kane's method. The technique provides a direct method for incorporating external environmental forces into the model. The model developed in this paper includes four major hydrodynamic forces: added mass, profile drag, fluid acceleration, and buoyancy. The model derived is a closed form solution which can be utilized in modern model-based control schemes.
Article PDF
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
References
Angeles, J., Ma, Ou, and Rojas, A. 1989. An algorithm for the inverse dynamics of n-axis general manipulators using Kane's equations. Computers and Mathematics with Applications, 17(21):1545–1561.
Craig, J.J. 1989. Introduction to Robotics, Addison-Wesley Publishing Company.
Fossen, Thor I. 1994. Guidance and Control of Ocean Vehicles, John Wiley & Sons.
Goheen, K.R. 1991. Modeling methods for underwater robotic vehicle dynamics. Journal of Robotic Systems, 8(3):295–317.
Goheen, K.R. and Jefferys, E.R. 1990. Multivariable self-tuning autopilots for autonomous and remotely operated underwater vehicles. IEEE Journal of Oceanic Engineering, 15(3):144–151.
Healey, A.J., Rock, S.M., Cody, S., Miles, D., and Brown, J.P. 1994. Toward an improved understanding of thruster dynamics for underwater vehicles. Proceedings of 1994 Symposium on Autonomous Underwater Vehicle Technology, pp. 340–352.
Ioi, K. and Itoh, K. 1990. Modeling and simulation of an underwater manipulator. Advanced Robotics, 4(4):303–317.
Kane, T.R., Likens, P.W., and Levinson, D.A. 1983. Spacecraft Dynamics, McGraw-Hill Inc.
Kato, N. and Lane, D.M. 1995. Coordinated control of multiple manipulators in underwater robots. 9th Int. Symposium on Unmanned, Untethered Submersible Technology, pp. 34–50.
L'evesque, B. and Richard, M.J. 1994. Dynamic analysis of a manipulator in a fluid environment. The International Journal of Robotics Research, 13(3):221–231.
Mahesh, H., Yuh, J., and Lakshmi, R. 1991. A coordinated control of an underwater vehicle and robotic manipulator. Journal of Robotic Systems, 8(3):339–370.
McMillan, S., Orin, D., and McGhee, R. 1995. Efficient dynamicsimulation of an underwater vehicle with a robotic manipulator. In IEEE Transactions on Systems, Man, and Cybernetics.
Nakamura, Y. and Savant, S. 1992. Nonlinear tracking control of autonomous underwater vehicles. In Proceedings of the 1992 IEEE International Conference on Robotics and Automation, A4–A9.
Patel, M.H. 1989. Dynamics of Offshore Structures, Butterworths.
Tarn, T.J., Bejczy, A.K., Marth, G.T., and Ramadorai, A.K. 1991. Kinematic characterization of the PUMA 560 manipulator, Lab Report, SSM-RL-91–15, Dept. of SSM, Washington University, St. Louis.
Whitcomb, L.L. and Yoerger, D.R. 1995. Comparative experiments in the dynamics and model-based control of marine thrusters. In Proceedings of Oceans'95 MTS/IEEE, San Diego, CA.
Yoerger, D.R. and Slotine, J.J.E. 1985. obust trajectory control of underwater vehicles. IEEE Journal of Oceanic Engineering, OE-10(4):462–470.
Yoerger, D.R., Cooke, J., and Slotine, J.J.E. 1990. The influence of thruster dynamics on underwater vehicle behavior and their incorporation into control system design. IEEE Journal of Oceanic Engineering, 15(3):167–177.
Yuh, J. 1990. Modeling and control of underwater robotic vehicles. In IEEE Transactions on Systems, Man, and Cybernetics, 20:531–543.
Yuh, J. 1995. Underwater Robotic Vehicles: Design and Control. TSI Press.
Yuh, J. and Gonugunta, K.V. 1993. Learning control of underwater robotic vehicle. Proceedings of IEEE Int. Conference on R&A, Atlanta Georgia.
Author information
Authors and Affiliations
Rights and permissions
About this article
Cite this article
Tarn, T.J., Shoults, G.A. & Yang, S.P. A dynamic model of an underwater vehicle with a robotic manipulator using Kane's method. Auton Robot 3, 269–283 (1996). https://doi.org/10.1007/BF00141159
Issue Date:
DOI: https://doi.org/10.1007/BF00141159