
Abstract
The structure and mechanical and tribological properties of composites based on a thermoplastic matrix of polyetheretherketone (PEEK) loaded with carbon fibers of various (nano-, micro and millimeter) sizes were studied. The research is aimed at developing composites applicable for use both in metal–polymer and ceramic–polymer tribojoints, including endoprostheses. It is shown that the surface layer of the PEEK composite loaded with carbon nanofibers can play a damping role in the friction process. This ensures an increased in wear resistance by 1.5–2 times. Carbon fibers of micron and millimeter length play a reinforcing role. Thus, the wear resistance of PEEK composites can be increased up to seven times in metal–polymer tribojoints, while this is reduced by 16 times in ceramic–polymer tribojoints. It is shown that by choosing the type and weight fraction of fiberlike fillers (carbon nano/micro/millimeter fibers) in PEEK matrix, the tribological and mechanical properties can be purposefully increased. This makes it possible to expand areas of application and product range for tribojoints in mechanical engineering and medicine, including those formed using additive technologies.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
INTRODUCTION
Polymer composites are widely used in tribotechnology due to the advantageous combination of manufacturability and antifriction properties. Materials for a matrix made of polyetheretherketone (PEEK), which have high strength, chemical and thermal resistance, and melt flow, which makes it possible to obtain products of complex shape by additive technology, are promising for critical applications [1–3]. In addition, the bioinertness and permeability to X-ray radiation in computed and magnetic resonance imaging facilitates the use of PEEK in orthopedics. However, a significant disadvantage of polyetheretherketone is low wear resistance. To increase the tribotechnical characteristics, functional fillers, including nanoscale ones, are introduced into the polyetheretherketone [4–6]. Thus, in [7], the antifriction characteristics of a composite based on PEEK with carbon nanofibers/nanotubes were determined and their role as a solid lubricant medium was discussed.
Orthopedic joint prosthetics, like natural friction units, require reliable connection between the implant and bone. One of the conditions for this is the deformation compatibility of the prosthesis, i.e., the closeness of the elastic modulus of the implant material and the cortical layer of bone tissue. If for metal implants this problem is solved by the formation of a porous structure [8], then in the case of polymer implants, conversely, the elastic modulus of the base, relatively low-modulus material should be increased by introducing a more rigid and at the same time bioneutral filler.
Therefore, it seems possible to significantly increase the wear resistance and elastic modulus of PEEK by modifying it with carbon fibers of various length, which will create a polymer–polymer endoprosthesis [9]. In it, the material of the “cup” of the artificial joint is a UHMWPE-composite [10], and the “head” can be made from a PEEK composite (heads are currently made of ceramic or metal alloys) [8]. An additional positive effect of reinforcement is a decrease in the creep of polyetherketone [9], which contributes, along with an increase in wear resistance, to an increase in shape stability of the endoprosthesis during its long-term (more than 10 years) operation.
Objective—to develop composites based on polyetheretherketone filled/reinforced with carbon fibers of various length (nano-, micro, millimeter), with high antifriction characteristics and deformation-strength properties comparable to bone tissues, as well as suitable for 3D printing. To this end, the authors conducted an experimental study of the structure and tribological and mechanical properties of carbon composites based on polyetheretherketone, the results of which are presented in this article.
MATERIALS AND METHODS
We used Victrex 450PF PEEK powder with an average particle size of 50 μm. As reinforcing fillers, we used Taunit carbon nanofibers (CNF) (∅ = 60 nm, l = 2–3 microns, LLC NanoTechCenter), milled carbon fibers (MCF), (l = 70 μm, ∅ = 10 μm, LLC ZUKM, Chelyabinsk), and milled carbon fibers (MCF, l = 200 μm, ∅ = 10 μm, ZUKM LLC), as well as chopped carbon fibers (CCF) (l = 2 mm, LLC ZUKM).
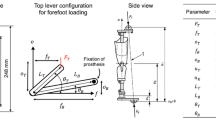
PEEK-based nanocomposites containing 0.3 wt % CNF were prepared. To obtain PEEK-composites with micro and millimeter carbon fibers, the latter were introduced in an amount of 30 wt % [7, 11]. The mechanical tensile characteristics were determined on an Instron 5582 testing machine on double-bladed samples (GOST 11262–80). Volumetric wear of the samples was determined on a CSEM CH2000 tribometer (CSEM, Switzerland) according to the ball-on disk scheme under a load of 10 N (contact pressure [Pmax] = 31.8 MPa) and a sliding speed of 0.3 m/s in the dry friction mode on a metal and ceramic counterbody. The radius of the counterbody in the form of a ball made of ShKh15 steel and ZrO2 ceramic was 6 mm. To study the surface of the tested samples, a New View 6200 optical profilometer (Zygo, United States) was used. The supramolecular structure of the composites was observed with a LEO EVO 50 scanning electron microscope (Carl Zeiss, Germany) at an accelerating voltage of 20 kV on the cleaved surface of notched specimens mechanically destroyed after cooling in liquid nitrogen.
RESULTS AND DISCUSSION
Table 1 gives the physicomechanical characteristics of PEEK-based composites with carbon fibers of various length (nano-, micro and millimeter). From the table it follows that the density and mechanical characteristics of carbon composites (hardness, elastic modulus, tensile strength) when filled with sufficiently long fibers increase up to two times, which indicates high adhesion of the matrix with the filler. The elongation at break, respectively, decreases with increasing strength of the composites.
Figure 1 plots the dependence of the strength characteristics of PEEK-based carbon composites on the length of the carbon fibers. Modification of PEEK with a small amount of carbon nanofibers (0.3 wt %) does not cause a noticeable increase in strength and elastic modulus, while filling with carbon fibers of micron and millimeter size increases these characteristics very significantly.

Mechanical properties of PEEK-based composites with carbon fibers of various dimensions.
Figure 2 shows SEM photographs of the supramolecular structure of all studied materials, from which it follows that in the initial PEEK matrix and composites based on it, a fragmented supramolecular structure is formed, the crystallinity of which decreases with increasing filler content (Table 1). Carbon fibers of micron and millimeter length, which have high adhesion to the matrix, act as a reinforcing filler, significantly increasing the mechanical characteristics of the composites (Table 1).

SEM micrographs of supermolecular structure of PEEK and composites based on it: (a) pure PEEK; (b) PEEK + 0.3 wt % CNF; (c) PEEK + 30 wt % MCF (70 μm); (d) PEEK + 30 wt % MCF (200 μm); (e) PEEK + 30 wt % CCF (2 mm).
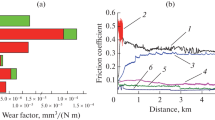
Then, we investigated the tribotechnical characteristics of the PEEK-based composites with carbon fibers of various length under dry friction conditions on the metal and ceramic counterbody. Data on the volumetric wear and friction coefficient of all investigated carbon composites are given in Table 2, from which it follows that the volumetric wear of PEEK-based composites with carbon fibers of nano-, micro, and millimeter length during friction in a metal–polymer tribojoint decreases from two to seven times. The introduction of a small (0.3 wt %) amount of carbon nanofibers doubles the wear resistance of PEEK. The friction coefficients in composites with carbon fibers of various length under these friction conditions are close and always less than that of unfilled PEEK: ff = 0.26–0.29 (Table 2, Fig. 3a).

Volumetric wear and friction coefficient of PEEK and composites based on it with sliding on steel (a) and ceramic counterbody (b).
In the case of a ceramic–polymer joint, a different dependence of the tribotechnical characteristics of the composite on the size of carbon fibers is observed (Table 2, Fig. 3b). While carbon nanofibres increase the wear resistance of a nanocomposite by 1.5 times, filling with micron- and millimeter-size carbon fibers unexpectedly causes an increase in wear up to 16 times during friction on a ceramic counterbody (Fig. 3b). The reasons for this will be discussed below in an analysis of the friction surfaces of polymer composites and a ceramic counterbody.
Figures 4 and 5 show photographs of the wear surfaces of samples of all studied composites, as well as steel and ceramic counterbodies, which agree well with the data in Table 2 and Fig. 3.

Topography of surface of samples and steel counterbody (friction track 3 km).

Optical patterns of topography of wear surfaces of samples and ceramic counterbody after friction path of 3 km.
On the surface of the friction track of an unfilled PEEK, microgrooves oriented in the sliding direction of the counterbody are observed (Fig. 4a). Wear traces are also visible on the surface of the steel counterbody, which indicates that the nature and magnitude of the wear of pure PEEK is determined by the microcutting effect of the worn steel counterbody (Fig. 4a).
The introduction of the CNF nanocomposite reduces the size of the wear crater on the surface of the counterbody made of ShKh15 steel (Fig. 4b); however, it does not completely exclude the formation of longitudinal microgrooves on its surface. For this reason, longitudinal microgrooves are also observed on the surface of the friction track of the polymer nanocomposite. In addition, pronounced transverse folds are revealed, the most likely reason for which is plastic deformation. Unfortunately, the authors have no additional data supporting plasticization of the surface layer (e.g., due to frictional heating, the degree of which can be estimated by measuring the temperature). On the other hand, it is the presence of short nanofibers in the surface layer that may contribute to its deformation in comparison with micron- or millimeter-size fibers. From the literature it is known that the introduction of nanofibers enhances the damping ability of the resulting nanocomposite. We add that filling PEEK with nanofibers leads to a decrease in the surface roughness of the sample from Ra = 0.156 μm (PEEK) to Ra = 0.145 μm (nanocomposite).
Carbon fibers of micron and millimeter size protect the surfaces of the samples, primarily as a result of increased hardness, and increase wear resistance. However, this effect is accompanied by microabrasive wear of the steel counterbody (Figs. 4c, 4d) It can be seen that deep grooves and scratches are observed on the friction surface of the latter, and the size of the wear crater is significant. An increase in the length of the MCF from 70 to 200 μm is accompanied by an increase in the surface roughness of the friction track from Ra = 0.330 to 409 μm. In the authors' opinion, short shock waves, randomly distributed and oriented in the polymer matrix, exit onto the friction surface, which, however, is not accompanied by an increase in the friction coefficient.
Thus, the increase in the wear resistance of PEEK composites compared to an unfilled polymer is accompanied by wear of the steel counterbody, while deep longitudinal grooves appear on the surface of PEEK composites, traces of plowing by the wear products.
A more effective filler for PEEK in a metal–polymer joint is millimeter-size CCF, which simultaneously increase the strength characteristics and wear resistance (Tables 1 and 2). Despite the microabrasive wear of the steel counterbody (Fig. 4d), the surface of the friction track of the PEEK composite has a rather low roughness Ra = 0.217 μm in the absence of longitudinal furrows and minimal wear for all studied types of carbon composites IV = 0.054 ± 0.01 mm3, which is 6.5 times less than for pure PEEK (Fig. 6).

Volumetric wear of PEEK and composites based on it during friction on steel (a) and ceramic (b) counterbody: (1) pure PEEK; (2) PEEK + 0.3 wt % CNF; (3) PEEK + 30 wt % CF (70 μm); (4) PEEK + 30 wt % CF (200 μm); (5) PEEK + 30 wt % CCF (2 mm).
When an unfilled PEEK is worn over a ceramic counterbody, the wear of the latter is unexpectedly recorded, similar to tests in a metal–polymer tribojoint. The size of the wear crater on the ceramic counterbody is smaller (Fig. 5a), but longitudinal microgrooves are also distinguishable. It is these that cause the formation of similar longitudinal microgrooves on the surface of the friction track of the filled polymer (Fig. 5a). The wear of the polymer sample in such a friction pair is reduced by a factor of 3.5 compared to the metal–polymer variant (Table 2).
When carbon nanofibers are introduced into PEEK, the nature of wear of the ceramic ball does not change (longitudinal microgrooves are also observed); however, this is accompanied by a 1.5-fold decrease in the volumetric wear of the polymer nanocomposite. On the surface of the friction track of the latter, predominantly individual deep longitudinal grooves are observed (Fig. 5b), the formation of which, according to the authors, is associated with the abrasive action of the wear products (additionally strengthened CNFs). We also note that no transverse folds are observed on the wear surface of the polymer composite (as in the case of the metal–polymer tribojoint), which may be due to the different nature of heat removal from the metal and ceramic counterbodies, as well as different chemical activity of ShKh15 steel and Al2O3 ceramic with respect to the PEEK matrix.
In composites with micron- and millimeter-size carbon fibers, there is no obvious microabrasive wear of the counterbody (Figs. 5c, 5d). Abrasion is present on the surface of the ceramic counterbody, the area of which is larger than the size of the wear crater of the sample of pure PEEK. The most probable reason for this is the large area of the friction track in PEEK composites, since the wear of PEEK reinforced with micro- and millimeter-length carbon fibers is more than an order of magnitude higher than that of unfilled PEEK (see Table 2). On the other hand, longitudinal grooves are not observed on the surface of the friction track of these polymer composites (Figs. 5c, 5d). Therefore, a multiple increase in the volumetric wear of PEEK with micron- and millimeter-size carbon fibers (Fig. 6) can be explained by the destructive action of the solid ceramic counterbody, the cyclic compressive (impact) effect of which on the reinforced composite causes its destruction via the fatigue mechanism. Thus, a multiple increase in mechanical strength by introducing a micron- and millimeter-size carbon fibers leads to a multiple decrease in the wear resistance of the PEEK composite during friction in a ceramic–polymer joint.
The results in Fig. 6 show that the choice of content of carbon fillers in the form of nano-, micro, and millimeter-size fibers can purposefully control the tribomechanical characteristics of PEEK and/or optimize the operating conditions of tribojoints made from PEEK composites.
As a practical recommendation, the authors propose to additionally introduce into the polymer matrix a solid lubricant filler (primarily, fluoroplastic, similar to the UHMWPE modification in [10]) to protect the counterbody from microabrasive exposure to micron- and millimeter-size carbon fibers.
CONCLUSIONS
With respect to the friction conditions in metal–polymer and ceramic–polymer joints, the antifriction and mechanical properties of carbon composites on a thermoplastic matrix made of polyetheretherketone filled with carbon fibers of various length (nano-, micro, millimeter) were studied.
The near-surface layer of polyetheretherketone modified with carbon nanofibers can play a damping role, which contributes to increased wear resistance by a factor of 1.5–2. Carbon fibers of micron and millimeter length are mainly reinforcing fillers, which increase the wear resistance of composites up to seven times in a metal–polymer tribojoint, but their use in ceramic–polymer tribojoint leads to a decrease in wear resistance by up to 16 times.
It is shown that, by choosing a content of carbon fibers of nano-, micro, and millimeter lengths, it is possible to purposefully control the tribomechanical properties of PEEK, thereby determining the scope and nomenclature of components for tribojoints.
REFERENCES
Walter, R., Friedrich, K., and Gurka, M., Characterization of mechanical properties of additively manufactured polymers and composites, AIP Conf. Proc., 2018, vol. 1981, art. ID 020033. https://doi.org/10.1063/1.5045895
Brenken, B., et al., Fused filament fabrication of fiber-reinforced polymers: a review, Addit. Manuf., 2018, vol. 21, pp. 1–16. ISSN 2214-8604. https://doi.org/10.1016/j.addma.2018.01.002
Duty, C., et al., What makes a material printable? A viscoelastic model for extrusion-based 3D printing of polymers, J. Manuf. Process., 2018, vol. 35, pp. 526–537. ISSN 1526-6125. https://doi.org/10.1016/j.jmapro.2018.08.008
Kumar, D., et al., Wear behavior of PEEK matrix composites: a review, Mater. Today, 2018, vol. 5, pp. 14583–14589
Werner, Ph., et al., Tribological behavior of carbon-nanofibre-reinforced poly(ether ether ketone), Wear, 2004, vol. 257, pp. 1006–1014.
Zhang, G., Structures and tribological performances of PEEK (poly-ether-ether-ketone)-based coatings designed for tribological application, Prog. Org. Coat., 2007, vol. 60, no. 1, pp. 39–44.
Panin, S.V., et al., Wear-resistant polyetheretherketone composites: with carbon nano- and microfibers, Mater. Today, 2018, vol. 5, pp. 25976–25982.
Choi, H., Shil’ko, S., Gubicza, J. and Choe, H., Study of the compression and wear-resistance properties of freeze-cast Ti and Ti‒5W alloy foams for biomedical applications, J. Mech. Behav. Biomed. Mater., 2017, vol. 72, pp. 66–73.
Shil’ko, S.V., Gavrilenko, S.L., and Panin, S.V., Analysis of the viscoelastic properties of polyetheretherketone and dispersion-filled composites based on it according to accelerated relaxation tests, Aktual. Vopr. Mashinoved., 2019, no. 8, pp. 401–404.
Panin, S.V., et al., Wear resistance of composites based on hybrid UHMWPE–PTFE matrix: mechanical and tribotechnical properties of the matrix, J. Frict. Wear, 2015, vol. 36, no. 3, pp. 249–256.
Kumar, D., Rajmohan, T., and Venkatachalapathi, S., Wear behavior of PEEK matrix composites: a review, Mater. Today, 2018, vol. 5, pp. 14 583–14 589.
Funding
The work was supported by the state assignment of ISPM SB RAS, project no. III.23.1.3, the President of the Russian Federation’s State Support of Leading Scientific Schools, grant no. NSh-2718.2020.8, and the Russian Foundation for Basic Research and Belarusian Foundation for Basic Research, project nos. 20-58-00032, 19-38-90106, and T18R-286.
Author information
Authors and Affiliations
Corresponding author
About this article

Cite this article
Panin, S.V., Anh, N.D., Kornienko, L.A. et al. Antifriction and Mechanical Properties of the Thermoplastic Matrix of Polyetheretherketone-Based Composites. J. Frict. Wear 41, 310–317 (2020). https://doi.org/10.3103/S1068366620040091
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.3103/S1068366620040091