
Abstract—
In connection with the 120th anniversary of the publication of the last volume of A. Poincaré’s book “New Methods of Celestial Mechanics”, the following methods are considered that have arisen since then.
1. The normal form method, which allows one to study regular perturbations near a stationary solution, near a periodic solution, etc.
2. The method of truncated systems obtained with the help of Newton polyhedra, which allows the study of singular perturbations.
3. The method of generating families of periodic solutions (regular and singular).
4. Method of generalized problems admitting bodies with negative masses.
5. Calculation of the network of families of periodic solutions as a “skeleton” of a part of the phase space.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 INTRODUCTION
In connection with the 120th anniversary of the publication of the last (third) volume of A. Poincaré's book “New Methods of Celestial Mechanics” [1], the following methods that have emerged over the past 120 years are considered here.
1. A normal form method that allows one to study regular perturbations near a stationary solution [2, Ch. I], near a periodic solution [2, Ch. II], [3–5], near the invariant torus [2, Ch. II] and near families of such solutions [2, Ch. VII, VIII], as well as bifurcations of periodic solutions and invariant tori.
2. The method of truncated systems obtained with the help of Newton polyhedra, which allows the study of singular perturbations. For the theory and three applications, see [6, Ch. IV]. Other applications: Beletskiy’s equation on satellite oscillations [7], problems of periodic flyby of the Moon and planets [8].
3. The method of generating families of periodic solutions (regular and singular). Generating families are the limits of families of periodic solutions as the perturbing parameters tend to zero. The solutions of the generating families consist of certain parts of the solutions to the limiting problem. If the limit problem is integrable, then the generating families are found analytically. Applications: the restricted three-body problem, where the limiting problem is the two-body problem and the generating families are one-parameter [2, Ch. III–V], [9–11]; Hill’s problem, where the limit problem is an intermediate Henon problem and each generating family consists of one solution [12, 13].
4. The method of generalized problems admitting bodies with negative masses [14]. Such problems have unified complete families of periodic solutions, which facilitates their calculation. Example: Hill’s problem [14].
5. Calculation of the network of families of periodic solutions as a “skeleton” of a part of the phase space. Poincaré [1] wrote about the benefits of such “skeletons”. Examples: Hill’s problem [14] and a partly restricted three-body problem [11, 15–20].
There are many more works on these methods. Here are the totals. The author and his collaborators contributed to the development and application of these five methods. These methods are discussed below in the order shown in Sections 2-6. A preliminary version of this work is a preprint [21], which corresponded to the sectional report of the author at the I section of the XII Congress on Mechanics (Ufa, 2019).
2 RESONANT NORMAL FORM
2.1 Autonomous System
Consider an autonomous Hamiltonian system
with n degrees of freedom in the vicinity of a fixed point
If the Hamilton function \(\gamma (\xi ,\boldsymbol\eta )\) is analytic at this point, then it can be expanded in a power series
where \({\mathbf{p}} = ({{p}_{1}}, \ldots ,{{p}_{n}})\), \({\mathbf{q}} = ({{q}_{1}}, \ldots ,{{q}_{n}}) \in {{\mathbb{Z}}^{n}}\), \({\mathbf{p}},{\mathbf{q}} \geqslant 0\), \({\boldsymbol{\xi }^{{\mathbf{p}}}} = \xi _{1}^{{{{p}_{1}}}}\xi _{2}^{{{{p}_{2}}}}...\xi _{n}^{{{{p}_{n}}}}\). Since point (2.2) is fixed, expansion (2.3) begins with quadratic terms. The linear part of system (2.1) corresponds to them. The eigenvalues of its matrix A are split into pairs
Let \(\lambda = ({{\lambda }_{1}}, \ldots ,{{\lambda }_{n}})\). Canonical coordinate changes
keep the system Hamiltonian.
Theorem 1 ([22, Sect. 12]). There is a canonical formal transformation (2.4) which reduces Hamiltonian (2.3) to the normal form
where the series \(g({\mathbf{x}},{\mathbf{y}})\) contains only resonance terms with
and the quadratic part of \({{g}_{2}}({\mathbf{x}},{\mathbf{y}})\) has its normal form (so that the matrix of the linear part of the system is the Hamiltonian analogue of the Jordan normal form). Here \(\left\langle {{\mathbf{p}},\boldsymbol\lambda } \right\rangle = {{p}_{1}}{{\lambda }_{1}} + + {{p}_{n}}{{\lambda }_{n}}\) is the scalar product.
If \(\lambda \ne 0\), then the normal form (2.5) is equivalent to a system with fewer degrees of freedom and additional parameters. Normalizing transformation (2.4) preserves small parameters and linear automorphisms
Local, i.e. passing through the point \({\mathbf{x}} = {\mathbf{y}} = 0\), families of periodic solutions of the system
corresponding to Hamiltonian (2.5), satisfy the system of equations
where a is a free parameter. They correspond to local families of periodic solutions of the original system (2.1).
For the real original system (2.1), the coefficients gpq of the complex normal form (2.5) satisfy special realness relations, and under the standard canonical linear change of coordinates \(({\mathbf{x}},{\mathbf{y}}) \to ({\mathbf{X}},{\mathbf{Y}})\), the system with Hamiltonian (2.5) goes over into the real system. There are several ways to calculate the coefficients gpq of the normal form (2.5). The simplest is described in the book [23] by Zhuravlev, Petrov, Shunderyuk. The resonant normal form of the autonomous Hamiltonian system near the stationary solution, which takes into account only the eigenvalues of the matrix A of its linear part and without restrictions on this matrix A, was introduced in [22, § 12]. Later, a slightly simpler superresonant normal form was introduced, which took into account the Jordan cells of the normal form of the matrix A [24]. But these additional simplifications did not allow an additional decrease in the number of degrees of freedom.
The theory of a resonant normal form near a stationary solution is described in detail in Chapter I of the book [2].
2.2 Periodic System
Let \(\boldsymbol\mu = ({{\mu }_{1}}, \ldots ,{{\mu }_{s}})\) be small parameters. By means of a formal canonical periodic change of coordinates \(\boldsymbol\xi ,\boldsymbol\eta ,t \to {\mathbf{x}},{\mathbf{y}},\tau \) the periodic in t Hamilton function \(\gamma (\boldsymbol\xi ,\boldsymbol\eta ,t,\boldsymbol\mu )\) with n degrees of freedom near the zero solution \(\xi = \eta = 0\), \(\mu = 0\) is reduced to the normal form
where \({\mathbf{p}},{\mathbf{q}} \in {{\mathbb{Z}}^{n}}\), \({\mathbf{r}} \in {{\mathbb{Z}}^{s}}\), \(m \in \mathbb{Z}\), \({\mathbf{p}},{\mathbf{q}},{\mathbf{r}} \geqslant 0\) and
Additional canonical transformation \({{x}_{j}} = {{u}_{j}}\exp ( - i\operatorname{Im} {{\lambda }_{j}}\tau ),{{y}_{j}} = {{v}_{j}}\exp (i\operatorname{Im} {{\lambda }_{j}}\tau ),j = 1, \ldots ,n\) transforms the normal form\(g({\mathbf{x}},{\mathbf{y}},\boldsymbol\tau ,\boldsymbol\mu )\) into a reduced normal form that does not depend on time [3, 4],
where \({\mathbf{p}},{\mathbf{q}} \in {{\mathbb{Z}}^{n}}\), \({\mathbf{r}} \in {{\mathbb{Z}}^{s}}\), \({\mathbf{p}},{\mathbf{q}},{\mathbf{r}} \geqslant 0\) and
For \(\boldsymbol\mu = 0\), the expansion of the series h in (2.6) begins with terms of order 3. Local families of periodic solutions of the original system correspond to local families of fixed points of the system with the reduced normal form of the Hamilton function (2.6). These fixed points \({\mathbf{u}},\;{\mathbf{v}},\;\boldsymbol\mu \) satisfy the system of equations
which has no linear part at μ = 0.
Chapter II of the book [2] presents a similar theory of the resonant normal form of an autonomous Hamiltonian system near a periodic solution. See also [3–5].
The normal form near an invariant torus and near a family of periodic solutions is described in [25, Part II]; [2, Ch. VII, VIII]. The normal form is useful for studying stability [26], bifurcations, integrability [27, 28], and asymptotic behavior of solutions.
3 THE TRUNCATED SYSTEMS METHOD
If an equation (or a system of equations) contains a linear part and does not contain terms with a negative exponent, then its linear part can be taken as a first approximation, and its nonlinear part can be considered as a perturbation. But if the equation does not have a linear part or contains terms with negative exponents, then the question arises: what should be considered as the first approximation? The answer to it is given by the method of truncated equations, which makes it possible to write out several first approximations and for each indicate the region in the space of variables and parameters where it dominates.
3.1 Truncated Hamilton Function
Let the vectors \({\mathbf{x}} = ({{x}_{1}}, \ldots ,{{x}_{n}})\), \({\mathbf{y}} = ({{y}_{1}}, \ldots ,{{y}_{n}})\) and \(\boldsymbol\mu = ({{\mu }_{1}}, \ldots ,{{\mu }_{s}})\) be canonical variables and small parameters, respectively. Let the Hamilton function be expanded in a power series
where \({\mathbf{p}} = ({{p}_{1}}, \ldots ,{{p}_{n}})\), \({{{\mathbf{x}}}^{{\mathbf{p}}}} = x_{1}^{{{{p}_{1}}}}x_{n}^{{{{p}_{n}}}}\) and \({{h}_{{{\mathbf{pqr}}}}}\) are constant coefficients.
Each term of series (3.1) is associated with its vector exponent \(Q = ({\mathbf{p}},{\mathbf{q}},{\mathbf{r}}) \in {{\mathbb{R}}^{{2n + s}}}\). The set S of all points Q with \({{h}_{Q}} \ne 0\) in the sum (3.1) is called the support \({\mathbf{S}} = {\mathbf{S}}(h)\) of the sum (3.1). The convex hull \(\boldsymbol\Gamma ({\mathbf{S}}) = \boldsymbol\Gamma (h)\) of the support S is called the Newton polytope of the sum (3.1). Its boundary consists of vertices \(\boldsymbol\Gamma _{j}^{{(0)}}\), edges \(\boldsymbol\Gamma _{j}^{{(1)}}\) and faces \(\boldsymbol\Gamma _{j}^{{(d)}}\) of dimensions d: \(1 < d \leqslant 2n + s - 1\). The intersection \({\mathbf{S}} \cap \boldsymbol\Gamma _{j}^{{(d)}} = {\mathbf{S}}_{j}^{{(d)}}\) is called the boundary subset of the set S. Each generalized face \(\boldsymbol\Gamma _{j}^{{(d)}}\) (including vertices and edges) corresponds to:
– normal cone
in the space \(\{ P\} = \mathbb{R}_{*}^{{2n + s}}\), conjugate to the space \({{\mathbb{R}}^{{2n + s}}}\);
– truncated sum
It is the first approximation to the sum (2.6) when
along \({\mathbf{U}}_{j}^{{(d)}}\). Thus, using truncated Hamiltonian functions, we can find approximate problems.
3.2 Limited Task of Three Bodies
Let two bodies P1 and P2 with masses \(1 - \mu \) and μ respectively, revolve around their common center of mass with a period of 2π. The plane circular restricted three-body problem is to study the plane motion of a body P3 of infinitesimal mass under the action of the Newtonian attraction of bodies P1 and P2. In a rotating (synodic) coordinate system, the problem is described by a Hamiltonian system with two degrees of freedom and one parameter μ [29]. The Hamilton function has the form [2]
Here body \({{{\mathbf{P}}}_{1}} = \{ {\mathbf{x}},{\mathbf{y}}:{{x}_{1}} = {{x}_{2}} = 0\} \) and body \({{{\mathbf{P}}}_{2}} = \{ {\mathbf{x}},{\mathbf{y}}:{{x}_{1}} = 1,{{x}_{2}} = 0\} ,\) where \({\mathbf{x}} = ({{x}_{1}},{{x}_{2}})\), \({\mathbf{y}} = ({{y}_{1}},{{y}_{2}})\). Consider small values of the mass ratio μ ≥ 0. For μ = 0 the problem becomes the problem of two bodies P1 and P3. But here it is necessary to remove from the phase space the points corresponding to the collisions of bodies \({{{\mathbf{P}}}_{2}}\) and \({{{\mathbf{P}}}_{3}}\). Collision points split the solutions of the problem of two bodies P1 and \({{{\mathbf{P}}}_{3}}\) into parts. For small μ > 0 near the body \({{{\mathbf{P}}}_{2}}\) there is a singular perturbation of the case μ = 0.
In order to find all the first approximations of the restricted three-body problem, it is necessary to introduce local coordinates
near the body \({{{\mathbf{P}}}_{2}}\) and expand the Hamiltonian function in a power series in these coordinates. After expanding \(1{\text{/}}\sqrt {{{{({{\xi }_{1}} + 1)}}^{2}} + \xi _{2}^{2}} \) in a Maclaurin series, Hamilton’s function (3.2) takes the form
where f is a convergent power series that does not contain terms of order less than three. Let
The set \({\mathbf{S}}\) of these points \((p,q,r)\) consists of the points
where \(k = 3,4,5, \ldots \) The convex hull of the set S is the polytope \(\boldsymbol\Gamma \subset {{\mathbb{R}}^{3}}\). Surface \(\partial \boldsymbol\Gamma \) of the polytope Γ consists of faces \(\boldsymbol\Gamma _{j}^{{(2)}}\), edges \(\boldsymbol\Gamma _{j}^{{(1)}}\) and vertices \(\boldsymbol\Gamma _{j}^{{(0)}}\). To each such element \(\boldsymbol\Gamma _{j}^{{(d)}}\) there corresponds a truncated Hamiltonian \(\hat {h}_{j}^{{(d)}}\), which is the sum of those terms of series (3.3) whose points (p, q, r) belong to \(\boldsymbol\Gamma _{j}^{{(d)}}\). Truncated Hamiltonian functions \(\hat {h}_{j}^{{(d)}}\) are different first approximations of function (3.3) valid in different regions of the space \(({{\xi }_{1}},{{\xi }_{2}},{{\eta }_{1}},{{\eta }_{2}},\mu )\). Figure 1 depicts a polyhedron Γ for series (3.3) in p, q, r, coordinates, which is a semi-infinite trihedral prism with an oblique base. It has four faces and six edges. Let’s consider them.

Fig. 1.
The face \(\boldsymbol\Gamma _{1}^{{(2)}}\), which is the oblique base of the prism Γ, contains the vertices
It corresponds to the truncated Hamilton function
It describes Hill’s problem [30], which is non-integrable. Power transformation
reduces the corresponding Hamiltonian system to the Hamiltonian system with the Hamiltonian function of the form (3.4), where \({{\xi }_{i}},{{\eta }_{i}},\mu \) must be replaced by \(\mathop {\tilde {\xi }}\nolimits_i ,\mathop {\tilde {\eta }}\nolimits_i ,1\), respectively.
Face \(\Gamma _{2}^{{(2)}}\) contains points
It corresponds to the truncated Hamiltonian function \(\hat {h}_{2}^{{(2)}}\), which is obtained from the function h at μ = 0. It describes the problem of two bodies \({{{\mathbf{P}}}_{1}}\) and \({{{\mathbf{P}}}_{3}}\), which is integrable.
Consider the edges. Of the six edges, one is improper. It passes through the point (0, 2, 0) parallel to the vector (1, 0, 0). On three edges, q = 0, that is, for them the truncated Hamiltonian functions do not depend on \({{\eta }_{1}},{{\eta }_{2}}\), and the solutions of the corresponding truncated Hamiltonian systems have \({{\xi }_{1}},{{\xi }_{2}}\) = const, which is not interesting. Two edges remain.
Edge \(\boldsymbol\Gamma _{1}^{{(1)}}\). It contains the points (0, 2, 0) and (–1, 0, 1) of the set \({\mathbf{S}}\). The corresponding truncated Hamilton function is
It describes the problem of two bodies \({{{\mathbf{P}}}_{2}}\) and \({{{\mathbf{P}}}_{3}}\). Power transformation (3.5) transforms it into a Hamilton system with a Hamilton function of the form (3.6), where \({{\xi }_{i}},\;{{\eta }_{i}},\;\mu \) is replaced by \({{\tilde {\xi }}_{i}},\;{{\tilde {\eta }}_{i}},\;1\), respectively.
The edge \(\boldsymbol\Gamma _{2}^{{(1)}}\) contains points (2, 2, 0) (1, 1, 0) (0, 2, 0) of the set \({\mathbf{S}}\). It corresponds to the truncated Hamilton function (3.4) with μ = 0. It describes an intermediate problem (between the Hill problem and the problem of two bodies \({{{\mathbf{P}}}_{1}}\) and \({{{\mathbf{P}}}_{3}}\)), which is integrable. This first approximation was introduced by Henon [31].
So, very close to the body \({{{\mathbf{P}}}_{2}}\) the first approximation of the original restricted problem with the Hamiltonian function (3.3) is the problem of two bodies \({{{\mathbf{P}}}_{2}}\) and \({{{\mathbf{P}}}_{3}}\) with Hamiltonian (3.6), just close is the Hill problem with Hamiltonian (3.4), further from the body \({{{\mathbf{P}}}_{2}}\) is the intermediate problem, and far from the body \({{{\mathbf{P}}}_{2}}\) is the problem of two bodies \({{{\mathbf{P}}}_{1}}\) and \({{{\mathbf{P}}}_{3}}\). Near the body \({{{\mathbf{P}}}_{2}}\) the periodic solutions of the bounded problem are perturbations of both periodic solutions of all the above four first approximations and the results of gluing the hyperbolic orbits of the two-body problem \({{{\mathbf{P}}}_{2}}\), \({{{\mathbf{P}}}_{3}}\) with segment solutions of either the two-body problem \({{{\mathbf{P}}}_{1}}\), P3, or an intermediate problem. In [32–36], periodic solutions of the intermediate problem were used as generators for finding periodic quasi-satellite orbits of the restricted problem.
3.3 3.3. Shortened systems
Consider now the collection of polynomials
Each \({{f}_{j}}({\mathbf{x}},{\mathbf{y}},\boldsymbol\mu )\) has its own support \({{{\mathbf{S}}}_{j}} \subset {{\mathbb{R}}^{{2n + s}}}\) and all accompanying objects: Newton’s polytope \({\boldsymbol{\Gamma }_{j}}\), its generalized faces \(\boldsymbol\Gamma _{{j{{k}_{j}}}}^{{({{d}_{j}})}}\), their normal cones \({\mathbf{U}}_{{j{{k}_{j}}}}^{{({{d}_{j}})}}\), boundary sets \({\mathbf{S}}_{{j{{k}_{j}}}}^{{({{d}_{j}})}}\), truncated polynomials \(\hat {f}_{{j{{k}_{j}}}}^{{({{d}_{j}})}}\). Moreover, for every non-empty intersection
there corresponds a set of shortenings
which is the first approximation of the set (3.7), for
near the intersection (3.8) and is called the shortening of the set (3.7).
Consider now the system of equations
corresponding to the set (3.7). System (3.10) corresponds to all the objects indicated for the set (3.7), as well as the truncated systems of equations
each of which corresponds to one set of truncations (3.9). Each truncated system (3.11) is the first approximation of the complete system (3.10).
3.4 Periodic Solutions of Hamilton’s Periodic System
As shown in Section 2.2, the search for local families of periodic solutions of the periodic Hamiltonian system is reduced to the search for local families of fixed points \({\mathbf{u}},\;{\mathbf{v}},\;\boldsymbol\mu \) of the system with the reduced normal form (2.6) of the Hamiltonian function, i.e., solution points of system (2.7).
To solve this system, it is necessary to consider the truncated systems and find their solutions, which will give the first approximations to the solutions of the system (2.7). For an example of such calculations, see [4]. Generally speaking, one periodic solution of the original system corresponds to several fixed points \({\mathbf{u}},\;{\mathbf{v}},\;\boldsymbol\mu \), that is, solutions of system (2.7).
Other applications of this method: the Beletskii equation of satellite oscillations [7] and the problem of periodic flyby of planets with a close approach to the Earth [8].
4 GENERATING FAMILIES OF PERIODIC SOLUTIONS
As soon as electronic computers appeared, they began to calculate families of periodic solutions of the restricted three-body problem for different cases: Sun–Jupiter, \((\mu \approx {{10}^{{ - 3}}})\), Earth–Moon \((\mu \approx {{10}^{{ - 2}}})\) etc. It turned out that these families are very similar, and their periodic solutions resemble solutions to the two-body problem. In 1968, Henon [37] realized that it was necessary to consider the limits of these families for μ → 0.
4.1 Method
Let the Hamilton function \(H(\mu )\) depend analytically on small parameters \(\boldsymbol\mu = ({{\mu }_{1}}, \ldots ,{{\mu }_{s}})\) and the corresponding Hamiltonian system has families of periodic solutions \({{\mathcal{F}}_{j}}(\boldsymbol\mu )\). Some of these families may have limits \({{\mathcal{F}}_{j}}(0)\) at \(\boldsymbol\mu \to 0\). Families \({{\mathcal{F}}_{j}}(0)\) are called generators. Their solutions are formed by parts of solutions of the Hamilton limit system with μ = 0.
If this limit system is integrable, then the generating families can be described analytically. This approach was proposed by Henon [37]. It was used for the Hill problem and for the restricted three-body problem [2, Ch. III–V], [9, 10].
4.2 Hill’s Problem
Its Hamilton function has the form
Corresponding system
describes the motion of the Moon (P3) with zero mass under the influence of the attraction of the Sun (P1), located at infinity, and the Earth (P2) with mass 1, located at the origin of coordinates. Hamilton function (4.1) is analytic in
We do the canonical coordinate transformation
and we get the Hamilton system
where
Let \(\varepsilon = \sqrt {2{\text{|}}H{\text{|}}} \) and \(H \to - \infty \). Then, in the limit, we obtain system (4.2) with
This is an intermediate task [31]. For h0 system (4.2) is linear and, therefore, integrable. Since the Hamiltonian h0 is homogeneous, it suffices to consider it for \({{h}_{0}} = 1{\text{/}}2\). It has one regular periodic solution
If the orbit \(({{X}_{1}}(t),{{X}_{2}}(t))\) of the solution to the Henon problem passes through the point
then the body P3 collides with the body P2 and the solution cannot be continued through the collision. Therefore, point (4.3) divides the solution into independent parts. Henon [31] found all the segment solutions that start and end with such collisions. They form a countable set of two types. The segment solutions of the first type are denoted by the symbols ±j, \(j \in \mathbb{N}\), and their orbits are epicycloids. For \(j = + 1, + 2, + 3\) they are shown in Fig. 2. The orbits of segment solutions with negative j values are symmetric to them about the X2 axis.

Fig. 2.
The segment solutions of the second type are denoted by the letters i and e, their orbits are ellipses passing through the point (4.3). They are shown in Fig. 3.

Fig. 3.
Theorem 2. ([12]). A sequence of segment solutions that does not contain two successively identical segment solutions of the second type is a generating solution for Hill’s problem.
Here the generating family of periodic solutions consists of one solution. All known families of periodic solutions to Hill’s problem include at least one generating solution.
In the restricted three-body problem, there is a countable set of one-parameter generating families. Some of them are quite complex.
5 GENERALIZED PROBLEMS
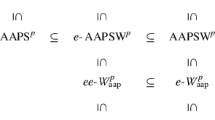
Usually in celestial mechanics bodies with non-negative masses are considered. But Batkhin [14] proposed to consider problems where some masses are negative. In the Hill problem with body mass equal to –1 (called the anti-Hill problem), families of periodic solutions are extensions of families of periodic solutions to the usual Hill problem. Therefore, it is more convenient to calculate families of periodic solutions for both problems at once: Hill and anti-Hill. This approach provides new families of periodic solutions for the usual Hill problem.
Figure 4 shows a diagram of the relationships between these families of Hill (left) and anti-Hill (right) problems. The center column gives the generative solutions for these families.

Fig. 4.
6 SKELETONS
In some parts of the phase space of the Hamilton system, there are many families of periodic solutions, and they form the “skeleton” of this part of the phase space. Therefore, the calculation of such families is very useful for studying the structure of the phase space. Batkhin [38] noted that in a system with a finite symmetry group, most of these families consist of periodic solutions that are invariant under all symmetries of this group.
In different problems, there are many computed families of periodic solutions, but their number is not yet sufficient to form a skeleton. For recent results in this direction for the restricted three-body problem, see [11, 15–20, 39–41]. For Hill’s problem, see [12–14, 31, 42–47].
7 CONCLUSIONS
All 5 methods are new not only in celestial mechanics, but also in Hamiltonian mechanics. Moreover, methods 1 and 2 are new in nonlinear analysis, and classical analysis can be considered as quasilinear, since all equations in it have linear parts. An example of the application of an essentially nonlinear analysis is the problem of a boundary layer on a needle [48].
REFERENCES
H. Poincaré, Selected Works, Vol. 2: New Methods of Celestial Mechanics. Topology. Number Theory (Nauka, Moscow, 1972), pp. 9–356.
A. D. Bruno, The Restricted 3-Body Problem: Plane Periodic Orbits (de Gruyter, Berlin, 1994).
A. D. Bruno, “Normal form of the periodic Hamiltonian system with n degrees of freedom,” KIAM Preprint № 223 (Keldysh Institute of Applied Mathematics, Moscow, 2018).
A. D. Bruno, “Normal form of a Hamiltonian system with a periodic perturbation,” Comput. Math. and Math. Phys. 60, 36–52 (2020). https://doi.org/10.1134/S0965542520010066
A. D. Bruno, “Normalization of the periodic Hamiltonian system,” Program. Comp. Soft. 46 (2), 76–83 (2020).
A. D. Bruno, Power Geometry in Algebraic and Differential Equations (Elsevier, Amsterdam, 2000).
A. D. Bruno and V. P. Varin, “The limit problems for the equation of oscillations of a satellite,” Celest. Mech. Dyn. Astron. 67 (1), 1–40 (1997).
A. D. Bruno, “On periodic flybys of the Moon,” Celest. Mech. 24, 255–268 (1981).
M. Henon, Generating Families in the Restricted Three-Body Problem (Springer, Berlin, 1997).
M. Henon, Generating Families in the Restricted Three-Body Problem. II. Quantitative Study of Bifurcations (Springer, Berlin, 2001).
A. D. Bruno and V. P. Varin, “Periodic solutions of the restricted three-body problem for a small mass ratio,” J. Appl. Math. Mech. 71 (6), 933–960 (2007). https://doi.org/10.1016/j.jappmathmech.2007.12.012
A. B. Batkhin, “Symmetric periodic solutions of the Hill’s problem. I,” Cosmic Res. 51, 275–288 (2013). https://doi.org/10.1134/S0010952513040035
A. B. Batkhin, “Symmetric periodic solutions of the Hill’s problem. II,” Cosmic Res. 51, 452–464 (2013). https://doi.org/10.1134/S0010952513050018
A. B. Batkhin, “Web of families of periodic orbits of the generalized Hill problem,” Dokl. Math. 90, 539–544 (2014). https://doi.org/10.1134/S1064562414060064
A. D. Bruno and V. P. Varin, “Family h of periodic solutions of the restricted problem for small μ,” Sol. Syst. Res. 43, 2–25 (2009). https://doi.org/10.1134/S003809460901002X
A. D. Bruno and V. P. Varin, “Families c and i of periodic solutions of the restricted problem for μ = 5 × 10−5,” Sol. Syst. Res. 43, 26–40 (2009). https://doi.org/10.1134/S0038094609010031
A. D. Bruno and V. P. Varin,“ Family h of periodic solutions of the restricted problem for big μ,” Sol. Syst. Res. 43, 158–177 (2009). https://doi.org/10.1134/S0038094609020099
A. D. Bruno and V. P. Varin, “Closed families of periodic solutions of a restricted three-body problem,” Sol. Syst. Res. 43, 253–276 (2009). https://doi.org/10.1134/S0038094609030071
A. D. Bruno and V. P. Varin, “On asteroid distribution,” Sol. Syst. Res. 45, 323 (2011). https://doi.org/10.1134/S0038094611040010
A. D. Bruno and V. P. Varin, “Periodic solutions of the restricted three body problem for small μ and the motion of small bodies of the Solar system,” Astron. Astrophys. Trans. 27 (3), 479–488 (2012).
A. D. Bruno, “The newest methods of celestial mechanics,” KIAM Preprint No. 79 (Keldysh Institute of Applied Mathematics, Moscow, 2019).
A. D. Bruno, “Analytic form of differential equations. II,” Trudy Moskov. Mat. Obschest. 26, 199–239 (1972).
V. Ph. Zhuravlev, A. G. Petrov, and M. M. Shunderyuk, Selected Problems in Hamiltonian Mechanics (LENAND, Moscow, 2015) [in Russian].
A. Baider and J. A. Sanders, “Unique normal forms: the nilpotent Hamiltonian case,” J. Diff. Equat. 92, 282-304 (1991).
A. D. Bruno, Local Methods in Nonlinear Differential Equations (Springer, Berlin, 1989).
A. P. Markeev, Libration Points in Celestial Mechanics and Astrodynamics (Nauka, Moscow, 1978) [in Russian].
A. D. Bruno and V. F. Edneral, “Algorithmic analysis of local integrability,” Dokl. Math. 79, 48–52 (2009). https://doi.org/10.1134/S1064562409010141
A. D. Bruno, “On an integrable Hamiltonian system,” Dokl. Math. 90, 499–502 (2014). https://doi.org/10.1134/S1064562414050263
L. Euler, Theoria Motuum Lunae (Typis Academiae Imperialis Scientiarum, Petropoli, 1772); Reprinted in: Opera Omnia, Ser. 2, Ed. by L. Courvoisier, Vol. 22 (Orell Fussli Turici, Lausanne, 1958).
G. W. Hill, “Researches in the Lunar theory,” Amer. J. Math. 1, 5–26, 129–147, 245–260 (1878);
Collected Mathematical Works (Carnegie Inst., Washington (D.C.), 1905), Vol. 1, pp. 223–238.
M. Henon, “Numerical exploration of the restricted problem. V. Hill’s case: periodic orbits and their stability,” Astron. Astrophys. 1, 223–238 (1969).
D. Benest, “Libration effects for retrograde satellitesin the restricted three-body problem. I: Circular plane Hill’s case,” Celest. Mech., No.13, 203–215 (1976).
A. Yu. Kogan, “Remote satellite orbits in finite circular three-body problem,” Kosmich. Issled, 26 (6), 813–818 (1988).
M. L. Lidov and M. A. Vashkov’yak, “Quasi-satellite periodic orbits,” in Analytical Celestial Mechanics, Ed. by K. V. Kholshevnikov (Kazan’ Univ., Kazan’, 1990), pp. 53–57.
M. L. Lidov and M. A. Vashkov’yak, “Theory of perturbations and analysis of evolution of quasi-satellite orbits in the restricted three-body problem,” Kosmich. Issled. 31 (2), 75–99 (1993).
M. L. Lidov and M. A. Vashkov’yak, “Quasi-satellite orbits for an experiment on refinement of the gravitational constant,” Astron. Lett. 20 (2), 188–198 (1994).
M. Henon, “Sur les orbites interplanetaires qui rencontrent deux fois la terre,” Bull. Astron. Ser. 3 3 (3), 377–402 (1968).
A. B. Batkhin, “On the structure of the Hamiltonian phase flow near symmetric periodic solution,” KIAM Preprint No. 69 (Keldysh Institute of Applied Mathematics RAS, Moscow, 2019).
A. D. Bruno and V. P. Varin, “On families of periodic solutions of the restricted threebody problem,” Celest. Mech. Dyn. Astron. 95, 27–54 (2006).
G. Voyatzis, T. Kotoulas, and J. D. Hadjidemetriou, “Symmetric and nonsymmetric periodic orbits in the exterior mean motion resonances with Neptune, ” Celest. Mech. Dyn. Astron. 91 (1/2), 191–202 (2005).
G. Voyatzis and T. Kotoulas, “Planar periodic orbits in exterior resonances with Neptune,” Planetary and Space Science 53 (11), 1189–1199 (2005).
M. Henon, “Numerical exploration of the restricted problem. VI. Hill’s case: non-periodic orbits,” Astron. Astrophys., No. 9, 24–36 (1970).
C. Simo and T. J. Stuchi, “Central stable/unstable manifolds and the destruction of KAM tori in the planar Hill problem,” Physica D 140, 1–32 (2000).
M. Henon, “New families of periodic orbits in Hill’s problem of three bodies,” Celest. Mech. Dyn. Astron. 85, 223–246 (2003).
M. Henon, “Families of asymmetric periodic orbits in Hill’s problem of three bodies,” Celest. Mech. Dyn. Astron. 93, 87–100 (2005).
G. A. Tsirogiannis, E. A. Perdios, and V. V. Markellos, “Improved grid search method: an efficient tool for global computation of periodic orbits. Application to Hill’s problem,” Celest. Mech. Dyn. Astron., No. 103, 49–78 (2009).
A. B. Batkhin and N. V. Batkhina, The Hill’s Problem (Volgograd. Nauch. Izd., Volgograd, 2009) [in Russian].
A. D. Bryuno and T. V. Shadrina, “An axisymmetric boundary layer on a needle,” Trans. Moscow Math. Soc. 2007, 201–259 (2007). https://doi.org/10.1090/S0077-1554-07-00165-3
ACKNOWLEDGMENTS
The author thanks A.B. Batkhin and E.P. Kazandzhan for their help in preparing this article.
Author information
Authors and Affiliations
Corresponding author
Additional information
Translated by I. K. Katuev
About this article

Cite this article
Bryuno, A.D. Modern Methods of Celestial Mechanics. Mech. Solids 56, 84–94 (2021). https://doi.org/10.3103/S0025654421010052
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.3103/S0025654421010052