
Abstract
This paper presents a critical evaluation of the physical aspects of lift generation to prove that no lift can be generated in a steady inviscid flow. Hence, the answer to the recurring question in the paper title is negative. In other words, the fluid viscosity is necessary in lift generation. The relevant topics include D’Alembert’s paradox of lift and drag, the Kutta condition, the force expression based on the boundary enstrophy flux (BEF), the vortex lift, and the generation of the vorticity and circulation. The physical meanings of the variational formulations to determine the circulation and lift are discussed. In particular, in the variational formulation based on the continuity equation with the first-order Tikhonov regularization functional, an incompressible flow with the artificial viscosity (the Lagrange multiplier) is simulated, elucidating the role of the artificial viscosity in lift generation. The presented contents are valuable for the pedagogical purposes in aerodynamics and fluid mechanics.
Similar content being viewed by others


1 Introduction
Can lift be generated in a steady inviscid flow? This question has been repeatedly raised in aerodynamics classes and popular science forums. In a strict sense, this is a hypothetic question or pseudo-question since inviscid flow does not exist in the real world, which is not easy to be rigorously and sufficiently answered in non-mathematical language. This directly mirrors the fundamental question in aerodynamics: how the lift is generated in flow. From an academic standpoint, a correct answer to this question is very meaningful due to its direct relevancy to the origin of the lift. Historically, the development of modern aerodynamics followed a sequence of mathematical simplifications from the Navier-Stokes (NS) equations to the Euler equations to the potential flow theory [1]. The analytical theory of aerodynamics has been largely developed based on the potential flow theory, and unfortunately the critical role of the fluid viscosity is not sufficiently emphasized and elucidated in most textbooks on aerodynamics. A complete and focused clarification on this question is lacking. Due to the recent publication by Gonzalez and Taha [2] who challenged the conventional understanding of the role of the fluid viscosity in lift generation, this intriguing question attracts a considerable renewed attention, which should be examined carefully in some technical aspects related to lift generation.
It is well known that the lift of an airfoil can be calculated by solving the NS equations for viscous flows. The ideal fluid with no viscosity is considered as a simplification, which leads to the Euler equations for inviscid flow. An integral of the Euler equations is the Bernoulli equation giving a relation between static pressure and velocity along a streamline in the inviscid irrotational flow. Therefore, to calculate the lift by integrating surface pressure on an airfoil, a velocity field around the airfoil should be reconstructed. Instead of using the NS equations and the Euler equations, the continuity equation for an incompressible flow is considered to reconstruct a velocity field. Further, since the continuity equation with the two unknown velocity components is not closed, the velocity potential is introduced, and the continuity equation becomes the Laplace equation under the incompressible and irrotational flow assumption. The elemental solutions of the Laplace equations allow reconstruction of various flows over bodies including airfoils [3, 4]. In general, the force (the lift and drag) of a three-dimensional (3D) body in the incompressible inviscid irrotational flow is zero, which is known as D’Alembert’s paradox of drag and lift. In a two-dimensional (2D) potential flow with a vortex, the most important result is the Kutta-Joukowski (K-J) theorem relating the sectional lift to the circulation [5]. However, the lift and circulation of an airfoil cannot be automatically determined in the potential flow theory unless the Kutta condition is applied at the sharp trailing edge of the airfoil. The Kutta condition is generally considered as a phenomenological representation of the viscous effect at the sharp trailing edge.
Physically, the fluid viscosity is necessary in lift generation. A question is whether there is a counterexample. In this paper, the physical aspects of the lift problem are examined to exclude the possibility of lift generation in a steady inviscid flow, including D’Alembert’s paradox, the K-J theorem in viscous flow, the Kutta condition, the BEF-based force expression in viscous flow, the vortex force, and the generation of the vorticity and circulation. In particular, the physical meanings of the variational formulations for determining the lift and circulation are elucidated.
2 No lift generated in steady inviscid flow
2.1 D’Alembert’s paradox and Kutta-Joukowski theorem
Figure 1 illustrates the flow over a wing (airfoil) at an angle of attack (AoA) enclosed by an outer control surface Σ at the incoming uniform freestream velocity U, where the boundary layers develop on the airfoil surface ∂B and shed into the wake. The velocity is decomposed into U + u, where u is the disturbance velocity generated by a body. As an idealized case, in inviscid, incompressible and irrotational flow where the boundary layer disappears, the force F acting on the body is calculated by integrating the surface pressure p that is given by the Bernoulli equation [6, 7]. Further, the force can be expressed as a surface integral of the perturbed momentum flux across the outer control surface, that is, in the index notation,
where Uj (j = 1, 2, 3) is the incoming uniform flow velocity component, ui is the perturbation velocity component, and ni is the unit normal vector to the body surface ∂B or the outer control surface Σ. According to Eq. (1), the near-field force expression equals to the surface integral of the perturbed momentum flux through the outer control surface. In the derivation of Eq. (1), the incompressible and irrotational conditions and the non-penetrating boundary condition are used [6, 7]. This derivation was originally given by Jowkowski [5].

Flow over a solid body (e.g. airfoil) enclosed by the outer control surface with the perturbed velocity and momentum flux
According to Eq. (1), the drag as the projected component of Eq. (1) in the freestream direction is zero, i.e.,
which is classical D’Alember’s paradox of drag indicating zero drag of a body in steady inviscid, incompressible and irrotational flow. In contrast to D’Alember’s paradox of drag, D’Alember’s paradox of lift that has not been emphasized is more relevant to the present topic. In general, for a 3D body, the perturbation velocity magnitude |u| is in the order of r−3, where r is the distance from the body to the outer control surface [7]. In this case, Fi → 0 as r → ∞ since the product of the perturbation velocity magnitude |u| ∝ r−3 and the area element dS ∝ r2 in the surface integral, Eq. (1), is O(r−1). Therefore, the lift of a 3D body is zero along with the drag in steady inviscid, incompressible and irrotational flow, which is considered as D’Alember’s paradox of lift in 3D inviscid flow. D’Alember’s paradox can be derived from different ways [8,9,10,11]. The important implication of D’Alember’s paradox is that no lift can be generated in the inviscid potential flow.
In a 2D flow where |u| is in the order of r−1, Fi could be non-zero since the product of the perturbation velocity magnitude |u| ∝ r−1 and the line segment dl ∝ r in the contour integral, Eq. (1), is O(1) [7]. For a point vortex, the perturbation velocity is expressed by the gradient of the velocity potential ϕ, i.e., u = ∇ϕ = (Γ/2π)∇θ, where θ is the polar angle and Γ is the circulation defined as
where Σ is a closed contour enclosing the airfoil, VΣ is a 2D flow domain enclosed by Σ, and ω is the spanwise component of the vorticity ω = ∇ × u. Eq. (1) gives the sectional lift
which is the Kutta-Joukowski (K-J) theorem.
The K-J theorem is the corner stone of the classical circulation theory of lift (the circulation theory in short). The major critic was focused on the fundamental shortcomings of the circulation theory. In the steady inviscid flow theory, it is difficult to explain how the circulation is generated. The appearance of Γ around an airfoil or a wing in the steady inviscid circulation theory evidently contradicts Kelvin’s circulation-conservation theorem indicating that the circulation can be neither created nor destroyed in an inviscid fluid. Interestingly, the K-J theorem coexists with D’Alember’s paradox of drag, and the lift-without-drag result is a dilemma in the inviscid circulation theory. According to D’Alamber’s paradox and the K-J theorem, the logical consequence is that the lift cannot be generated in steady inviscid, incompressible and irrotational flow unless the circulation exists a priori. Since the circulation cannot be generated physically in inviscid flow, a further implication is that the lift is generated only in viscous flow since the vorticity is generated and concentrated in the boundary layer on the airfoil surface.
The classical argument on the origin of the circulation was given by Glauert [12] and Prandtl and Tietjens [13] based on flow visualizations in a starting flow, which was further elaborated by Batchelor [7]. The airfoil circulation is inferred from the observed starting vortex generated by a suddenly accelerating airfoil according to Kelvin’s circulation conservation theorem. However, as pointed out by McLean [14], this argument is more like logical inference than a physical explanation, which basically assumes the existence of the circulation in the airfoil, and fails to explain how it is generated.
2.2 Kutta condition
To a great extent, the success of the circulation theory depends on the clever application of the Kutta condition that is an implicit manifestation of the viscous-flow effect on lift generation. It has long been recognized that the Kutta condition is a natural result of the viscous-flow processes at the sharp trailing edge, which is clearly elucidated by Sears [15]. From a phenomenological standpoint, the Kutta condition can be stated in different ways. For example, Glauert [12] stated “the flow must leave the trailing edge smoothly”; von Kármán and Burgers [16] stated “in the final steady flow, the rear stagnation point shall coincide with the trailing edge of the airfoil” [7]. In general, for a non-sharp trailing edge, the classical Kutta condition is not applicable since it does not represent the condition of flow separation near the trailing edge, although Sears [15] extended the Kutta condition for moderately separated boundary layers.
In a 2D steady viscous flow, the vortical wake must extend downstream unboundedly, and any contour Σ surrounding an airfoil must cut through the wake, leaving some vorticity outside of Σ. In this case, since the Bernoulli equation no longer holds across the viscous wake, the original derivation of Eq. (4) by Jowkowski [5] is not strictly applicable. The applicability of the K-J theorem in a viscous flow was first studied experimentally by Bryant and Williams [17]. To explain the experimental findings, Taylor [18] provided a theoretical account. If the downstream face of the outer contour Σ is a wake plane denoted by W, for Re ≫ 1, the lift and form drag are given by
where ΓΣ is the circulation along the outer contour Σ, and P is the total pressure. The condition imposed on Eq. (5) is that at the wake plane the net vorticity flux must vanish, i.e.,
where u is the velocity projected on the freestream direction. Eq. (7) indicates that the positive and negative advective vorticity fluxes (uω) from the boundary layers on the upper and lower surfaces are cancelled out in the wake in order to make the K-J theorem valid in viscous flows [19, 20]. Figure 2 illustrates the properties of the boundary layers on the airfoil surface and the cancelation of the vorticity fluxes from the upper and lower surfaces at the trailing edge [19].

Illustration of the boundary layer and wake around an airfoil. From Liu [19]
Equation (7) is necessary for the circulation ΓΣ to be independent of the position of the wake plane (W). Sears [15] further proved that Eq. (7) would be equivalent to the requirement that the pressures at the outer edges of the boundary layers at the trailing edge on the upper and lower surfaces must be the same (the zero-pressure-difference condition at the trailing edge, i.e., the Kutta condition). This Taylor-Sears condition provides a viscous-flow-theoretical foundation for the empirical Kutta condition. Moreover, according to Eqs. (5)–(6), the K-J theorem naturally coexists with the form drag formula in the viscous-flow framework, which resolves the dilemma in the inviscid circulation theory associated with D’Alembert’s paradox of drag.
To examine the Taylor-Sears condition, Liu et al. [21] presented the direct numerical simulation (DNS) of the low-Reynolds-number flow over a flat-plate airfoil at different AoAs. The difference of the Lamb vector integrals across the boundary layers on the upper and lower surfaces, i.e., \(\varDelta l={\left[ u\omega \right]}_{-}^{+}\), is evaluated, where “+” and “- “denote the upper and lower surfaces, respectively. The Lamb vector difference Δl can be interpreted as the local loading on the flat plate, and at the same time \(\varDelta l={\left[ u\omega \right]}_{-}^{+}\) represents the net advective vorticity flux across the boundary layers on the flat-plate airfoil. Figure 3 shows the chordwise distributions of the normalized Lamb vector difference \(2{\varDelta l}^{\ast }/\alpha = 2\varDelta l/{U}_{\infty}^2\alpha\) on the flat plate at different AoAs in comparison with the normalized pressure coefficient difference ΔCp/α given by the thin-airfoil theory. It is found that \(\varDelta l={\left[ u\omega \right]}_{-}^{+}=0\) at the trailing edge, validating the Taylor-Sears condition in this viscous flow.

The normalized chordwise distributions of the Lamb vector integral across the boundary layers on the flat-plate airfoil. From Liu et al. [21]
2.3 Force of a body in viscous flow
D’Alembert’s paradox is derived based on the assumption of steady inviscid, incompressible and irrotational flow. The steady incompressible irrotational flow condition is strong and restricted. A question is whether this problem can be studied under a weaker condition directly based on the NS equations. For an unsteady compressible viscous flow over a stationary surface, an exact relation between surface pressure (p) and skin-friction (τ) was derived from the NS equations by Liu et al. [22] and Chen et al. [23], and it is written as
where a virtual source term fΩ is expressed as
where Ω = |ω|2/2 is the enstrophy, ∂/∂n is the derivative along the wall-normal direction, ω = ∇ × u is the vorticity, K is the surface curvature tensor, θ = ∇ ⋅ u is the dilation rate, μ is the dynamic viscosity, μθ is the longitudinal viscosity, and n is the unit normal vector of the surface. The subscript w in the variables and operators in Eq. (9) denotes the quantities on a wall. Eq. (8) holds instantaneously. In Eq. (9), the first term μ[∂Ω/∂n]w is the boundary enstrophy flux (BEF), and the second term is interpreted as a curvature-induced contribution. The term ωw ⋅ K ⋅ ωw in Eq. (9) is formally interpreted as the interaction between the surface curvature and the vorticity on the surface. In general, fΩ is dominated by the BEF while the curvature term can be neglected. The BEF is an intriguing quantity that is particularly related to the topological features such as isolated critical points and separation/attachment lines in a skin-friction field [24, 25].
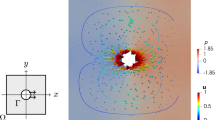
Skin friction lines (τ-lines) and surface pressure gradient lines (∇p-lines) are distributed on a surface as a dense network, which are coupled through Eq. (8). As an example, Fig. 4 shows the distributions of τ-lines and ∇p-lines in the complex separated flow on the 70o-delta wing at AoA of 20o, the Mach number of 0.55 and the total pressure of 100 kPa [22]. The zoomed-in view in Fig. 4b shows the detailed network topology indicating the separation line is locally orthogonal to ∇p-lines. In general, τ-lines and ∇p-lines are neither parallel nor orthogonal. Therefore, integration of ∇p along a τ-line allows the determination of surface pressure. Along a τ-line, Eq. (8) is re-written as
where s = τ/|τ| is the unit vector along a τ-line and ds is the differential length along a τ-line. Therefore, the surface pressure is given by the path integral along a τ-line, i.e.,
where P(x) and P0(x0) denote a point and a starting point on a τ-line, respectively. In principle, a set of the starting points P0(x0) from which τ-lines are originated could be selected such that the points P(x) on a set of τ-lines can cover densely the whole surface. Therefore, Eq. (10) symbolically expresses a surface pressure field.

Skin friction lines (solid red lines) and surface pressure gradient lines (dashed blue lines) on the 70o-delta wing at AoA of 20o, the Mach number of 0.55 and the total pressure of 100 kPa: a global view, and b zoomed-in view of the region of interest near the left corner of the wing. From Liu et al. [22]
From Eq. (10), Liu et al. [21] gave the BEF-based force expression formally given in a surface integral, i.e.,
Equation (11) explicitly describes the critical role of the fluid viscosity in generating the force (the lift and drag). For an inviscid flow with μ = 0, we have F = 0. Thus, D’Alembert’s paradox of drag and lift is naturally recovered in the viscous-flow framework. According to Eq. (11), the lift and drag (including the pressure and skin-friction drags) coexist as a result of the viscous flow over an airfoil. Physically, the lift cannot be generated without the cost of generating the viscous drag at the same time. Note that Eq. (11) has been used to derive a viscous-flow lift formula of a flat-plate airfoil [21].
2.4 Vortex lift
The question in the paper title is further discussed based on the general force expressions for viscous flows. From the NS equations, the force acting on a body in an incompressible flow is expressed as [26, 27]
where q = |u| is the magnitude of velocity, Vf denotes the control volume of fluid, ∂B denotes the surface of the body B, Σ denotes the outer control surface enclosing the body, and n is the unit normal vector pointing to the outside of the control surface. The term A in Eq. (12) is a volume integral of the local acceleration of fluid induced by a moving solid body and unsteady flow structures as the unsteady inertial effect. The term B is a volume integral of the Lamb vector, l = u × ω, which represents the vortex force. The terms C and D are the surface integral of the total pressure (the total head) p + ρq2/2 on the outer control surface Σ and the term E is the surface shear stress on the outer control surface Σ. The term F is the boundary term related to the motion of body boundary ∂B. In an inviscid irrotational unsteady flow where the terms B, C, D and E in Eq. (12) vanish, the remaining terms A and F together are interpreted as the added-mass force in ideal fluid mechanics. The general force expressions for viscous flows have been comprehensively discussed by Wu et al. [28,29,30] by transforming the pressure term to the velocity-related terms. However, the physical meanings of some complicated terms cannot be easily elucidated and their relative contributions to the lift and drag cannot be clearly distinguished.
A good lift formula should have a minimal number of the terms with lucid physical meanings such that flow structures responsible to lift generation can be clearly identified. For a rectangular outer control surface Σ where the upper and lower faces are sufficiently far away from the wing, from Eq. (12), the two-term lift formula for a viscous flow over a wing is given by Wang et al. [26], i.e.,
where Lvor is the vortex lift and La is the lift associated with the fluid acceleration, and k is the unit vector normal to the freestream. In a limiting case where a moving body is in an inviscid irrotational flow, La is interpreted as the added-mass lift. The vortex lift is exclusively contributed by the Lamb vector l = u × ω that is distributed very near a wall in the boundary layer on a body, as illustrated in Fig. 2. Therefore, it is inferred that the true cause of the lift is the boundary-layer vorticity that cannot be generated in inviscid flow. The classical results, including the K-J theorem and the unsteady thin-airfoil theory, can be reduced from Eq. (13) in the viscous-flow framework [20, 26].
2.5 Vorticity and circulation
Naturally, the further question is how the vorticity is generated on a wall. The origin of the vorticity was studied by Lighthill [31, 32], who gave a pair of equations for pressure and vorticity on a wall, i.e.,
where s and n are the local coordinates in the tangent and normal directions on a streamline, respectively, and μ is the dynamic viscosity of fluid. Eq. (14) indicates the viscous coupling between surface pressure and vorticity. The tangential pressure gradient can generate new vorticity at the rate measured by the boundary vorticity flux (BVF) defined by μ∂ω/∂n. Then, the vorticity generated by the BVF at the wall diffuses into the fluid and advects downstream by the tangential pressure gradient. The causality of the physical processes in Eq. (14) can be elucidated based on an estimate of the time scales of pressure propagation and vorticity diffusion. When a body moves in fluid, pressure is generated as the first causal mechanism, which is an inviscid process with the timescale tp ∼ c/a, where c is the characteristics length of the body and a is the speed of sound. The diffusion time scale of the vorticity is tω ∼ δ2/v, where δ is the effective viscous diffusion distance and ν is the kinematic viscosity. If the estimated boundary-layer thickness is \(\delta \sim c{Re}_c^{-n}\), there is an estimate \({t}_p/{t}_{\omega}\sim M{Re}_c^{2n-1}\), where Rec = U∞c/ν is the Reynolds number, M is the Mach number, and n is a positive exponent. For an incompressible flow with M → 0, there must be tp/tω ≪ 1.
In a transient starting motion of an airfoil in a viscous fluid, establishing a pressure field around an airfoil is much faster than that of the corresponding vorticity field. Therefore, in the very early stage where the vorticity field is not diffused yet, the established pressure field would be similar to that in inviscid flow, generating zero lift due to a lack of the viscous effect. In this sense, an inviscid flow could be realized in a very short time at the beginning of the starting viscous flow. This conjecture is confirmed by numerical simulations conducted by Zhu et al. [33] on a laminar accelerating uniform incoming incompressible flow over a NACA0012 airfoil at AoA of 6o.
In a very short time period immediately after the flow starts up, as shown in Fig. 5, the pressure field and the tangential pressure gradient on the airfoil surface are instantly established, and thus the BVF is generated almost at the same time through the pressure-vorticity coupling at the surface according to Eq. (14). However, in such a short time period, the generated boundary vorticity is not yet diffused into the fluid since the diffusion timescale is much larger than the molecule relaxation time. Therefore, the flow field over the airfoil exhibits the typical topology of the inviscid irrotational flow, in which a semi-saddle (the rear stagnation point) occurs on the upper surface rather than at the trailing edge. At this moment, the circulation and lift are zero, and the Kutta condition is not established yet. As the boundary layer develops on the airfoil surface as time increases, the lift and circulation increase and approach their steady-state values [33]. Accordingly, the several versions of the Kutta condition are gradually established. This numerical result evidences that no lift is generated when the effect of the fluid viscosity is not activated in a short time and the generation of the circulation and lift is a viscous-flow phenomenon.

Streamline pattern of the starting flow over an airfoil at the very early stage t/Tref = 0.002, exhibiting the inviscid irrotational flow topology, where Tref is the time scale from the start to the onset of the steady flow. a illustration of global topology, and b local topology near the trailing edge. Adapted from Zhu et al. [33]
Interestingly, the above time-scale analysis and numerical simulation indicate the feasibility of creating the potential flow pattern over a starting airfoil in a short time in normal viscous fluids (such as water and air) in conventional fluid mechanics experiments. For flow measurements in such experiments, the diffusion time scale of the vorticity tω ∼ δ2/v should be sufficiently large to capture global velocity data, and therefore the kinematic viscosity ν should be small (water could be a suitable fluid). In the real world, superfluid flow at near-zero Kelvin is close to inviscid flow. Craig and Peillam [34] measured the lift on an airfoil in a velocity field of perfect superfluid flow within liquid helium II in a “superfluid wind tunnel”. It was found that for sufficiently low velocity, the flow was pure potential flow with no circulation and lift such that the Kutta condition did not hold. This is the first reported experimental evidence indicating that no lift is generated in a hydrodynamic flow without the fluid viscosity. However, since this experiment, no further force measurement in superfluid flow has been reported.
3 Variational formulations
3.1 Hertz’ principle
Gonzalez and Taha [2] proposed a variational theory of lift by applying Hertz’ principle of least curvature that is rarely used in physics to inviscid flow to determine the airfoil circulation as an alternative to the Kutta condition. It is claimed that this theory challenges the accepted wisdom about the Kutta condition being a manifestation of viscous effects. Further implication of their work is that the circulation and lift of a body with a sharp or blunt trailing edge can be determined in inviscid flow by this condition that is irrelevant to the effects of the fluid viscosity. Their main argument is that the lift can be determined in inviscid flow and the role of the fluid viscosity is not critical in lift generation. Here, it is necessary to examine the physical meanings of the variational principle proposed by Gonzalez and Taha [2].
Applying Hertz’ principle of least curvature in analytical mechanics to steady inviscid flow, Gonzalez and Taha [2] proposed the functional
where a is the acceleration of fluid, Ω is a fluid domain, and x = (x1, x2) are the 2D Cartesian coordinates. In Eq. (15), the underlying assumption is that a velocity field can be explicitly expressed as a function of the circulation Γ. To determine the circulation Γ, they considered an unconstrained variational problem
This variational method was applied to a Joukowski airfoil in potential flow to determine the circulation \(\hat{\mathit{\Gamma}}\) at which \(S\left(\hat{\mathit{\Gamma}}\right)=min\). For a Joukowski airfoil with a sharp trailing edge, this method gave the circulation \(\hat{\mathit{\Gamma}}\) that was approximately consistent with that given by using the Kutta condition. For the airfoil with a non-sharp trailing edge, \(\hat{\mathit{\Gamma}}\) is smaller than the value given by the Kutta condition. Gonzalez and Taha [2] attempted to prove that Eq. (16) is consistent with the Euler equations (the pitfalls of their derivation are discussed in Section 3.2). Such a variational constraint is not unique, and other constraints could be proposed to determine the circulation as long as they are physically reasonable. In general, a variational formulation itself as a mathematical constraint imposed on the flow does not directly elucidate the physical role of the fluid viscosity in lift generation.
For an incompressible inviscid irrotational flow, Eq. (15) is equivalent to
In fact, according to Eq. (17), the condition S(Γ) → min removes the singularity at a sharp trailing edge where |∇p|2 → ∞ and |∇|u|2| → ∞. Essentially, Eq. (17) is a smoothness functional for a velocity field. In the real world, only when the flow is viscous, the singularity disappears such that |∇p|2 and |∇|u|2| are finite at the sharp trailing edge. From this perspective, this variational functional for a sharp trailing edge is physically consistent with the Kutta condition, but it is weaker than the classical Kutta condition with zero-pressure jump Δp = 0 or zero-velocity jump Δu = 0. The effect of the viscosity is imbedded in Eq. (16).
Similar to the Kutta condition, the adapted form of Hertz’ principle of least curvature for ideal flows should be considered as a physical model rather than the first principle since its validity has not been proved for a wide range of separated flows over round bodies. More critically, Eq. (16) assumes that the circulation exists in the flow over a body, and therefore the variational theory of lift itself cannot explain where the circulation comes from. As pointed out in Section 2.5, the circulation is generated as a viscous-flow phenomenon. From an operational standpoint, a velocity field cannot be generally expressed as an explicit analytical function of the circulation Γ except for a few simple cases like the Joukowski airfoil. In short, this unconstrained variational formulation neither provides a solid evidence supporting the argument that the lift can be generated in inviscid flow, nor elucidates explicitly the effect of the viscosity on lift generation.
3.2 Hertz’ principle constrained by continuity equation
Gonzalez and Taha [2] also attempted to prove that Eq. (16) based on Hertz’ principle constrained by the continuity equation corresponds to the Euler equations unconditionally. However, in their derivation, the regularization functional of the velocity divergence is not non-negative and the variational operator is only applied to the time derivative of velocity rather than the velocity. In addition, they treated the Lagrange multiplier as the fluid pressure without a justification of its physical meaning. Here, their problem is re-formulated. We consider the functional
where u = (u1, u2) is the velocity in a 2D flow, ut = ∂u/∂t is the time derivative of velocity, and β is a Lagrange multiplier. In Eq. (18), the first term is the equation term based on Hertz’ principle, and the second term is the regularization term based on the continuity equation. In the regularization term, the L2 norm of ∇ ⋅ u is used to ensure the positive nature of the term compared to the integral of ∇ ⋅ u used by Gonzalez and Taha [2]. Unlike Eq. (15), Eq. (18) does not assume that the velocity field can be explicitly expressed as a function of the circulation. Equivalently, the continuity equation and Hertz’ principle can be used as the equation term and the regularization term, respectively, and the same Euler-Lagrange equation can be obtained.
The constrained variational formulation is
Equation (19) minimizes the weighted average of the two positive terms to approach the theoretical limit J(u) = 0. From a standpoint of applications, it is suitable to select a positive Lagrange multiplier. We consider a perturbed velocity field u + εv, where v is a test function (a variation or perturbation) and ε is a parameter (a magnitude). The optimality condition is
where a = ut + u ⋅ ∇u is the fluid acceleration and the irrotational conditions ∇ × u = 0 and ∇ × v = 0 are imposed to obtain the divergence term ∇ ⋅ [a(u ⋅ v)]. Using Green’s theorem, we have
where ∂Ω is the boundary of a fluid domain Ω, and n is the normal vector on ∂Ω. When it is assumed that the boundary condition n ⋅ a = 0 holds on ∂Ω, Eq. (21) is zero. When the continuity equation ∇ ⋅ u = 0 holds on ∂Ω, Eq. (22) is zero. Therefore, Eq. (20) becomes
Therefore, the Euler-Lagrange equation is
where α = β−1 is a coefficient that is also a Lagrange multiplier. The first and second terms in Eq. (24) correspond to the continuity equation and Hertz’ principle as a constraint, respectively. It is noted that when β is a function of the position x included in the integral in the regularization functional in Eq. (18), the same Euler-Lagrange equation can be obtained.
The physical meaning of the acceleration divergence term ∇ ⋅ a is discussed by Chen and Liu [35]. From the Euler equations, we have the pressure Poisson equation
where Q is the second invariant of the strain rate tensor. The second invariant Q is defined as
where S2 = tr (S ST) and Ω2 = tr (Ω ΩT), S and Ω are the symmetric and antisymmetric components of ∇u. The components of S and Ω are Sij = (∂ui/∂xj + ∂uj/∂xi)/2 and Ωij = (∂ui/∂xj − ∂uj/∂xi)/2 (i, j = 1, 2). The second invariant Q represents a balance between the vorticity magnitude and shear strain. When Q is positive, the rotational motion locally prevails over the shearing motion. Hunt et al. [36] proposed that a vortex could be defined as a compact region with the positive second invariant Q. Therefore, the second term in Eq. (24) is αu∇ ⋅ a = − 2αuQ representing the flux of Q. From this perspective, Hertz’ principle as a constraint introduces the rotation motion characterized by Q, implying the presence of the circulation in flow. This physical meaning is interesting, providing some justification of Eq. (15) in the unconstrained variational problem for determining the circulation. Clearly, Eq. (24) is not the Euler equations, indicating that the variational formulation based on Hertz’ principle does not correspond to the Euler equation. Due to the use of Hertz’ principle, Eq. (24) is a non-linear partial differential equation system that has higher order than the Euler equations, which is difficult to solve.
3.3 Continuity equation constrained by Tikhonov regularization functional
The continuity equation is not closed since there are the two unknown velocity components in the single equation. Instead of using the velocity potential in the potential flow theory, the smoothness regularization functional is used for not only the closure of the continuity equation as an inverse problem, but also removing the singularity of a velocity field at a sharp trailing edge. This is different from the potential flow theory where the Kutta condition is imposed as an extra condition at a trailing edge to remove the velocity or pressure singularity.
Considering a 2D incompressible flow described by the continuity equation ∇ ⋅ u = 0, we propose a functional
where u = (u1, u2) is the velocity in a 2D flow and α is a Lagrange multiplier. In Eq. (25), the first term is the equation term, and the second term is the first-order Tikhonov regularization functional to remove any singularity of velocity at a sharp trailing edge [37]. The constrained variational formulation is
Compared to Eq. (16), Eq. (26) does not assume the explicit existence of the circulation. We consider a perturbed velocity field u + εv, where v is a test function (a variation or perturbation) and ε is a parameter (a magnitude). To find J(u) → min, the optimality condition is
where θ = ∇ ⋅ u is the dilatation rate. Using Green’s theorem, we have
where ∂Ω is the boundary of a fluid domain Ω, and n is the normal vector on ∂Ω.
When the continuity equation θ = ∇ ⋅ u = 0 and the Neumann condition n ⋅ ∇u = 0 hold on ∂Ω, Eq. (28) is zero and the first term in the RHS of Eq. (29) vanishes. Further, a class of the test functions is considered, satisfying the Laplace equation ∇2v = 0 with the Neumann condition n ⋅ ∇v = 0. Therefore, Eq. (27) becomes
which leads to the Euler-Lagrange equation
The Neumann condition ∂u/∂n = 0 on ∂Ω is introduced in the derivation of Eq. (31). On a solid surface, the non-penetrating condition n ⋅ u = 0 is imposed as an extra constraint. Eq. (31) describes an incompressible flow with a smooth velocity field, providing a new method beyond the potential flow theory. Compared to Eq. (24), Eq. (31) is linear, which can be readily solved by using the standard numerical method. The solution of Eq. (31) is an interesting topic of future study, and the physical meaning of this equation is discussed here.
In the above derivation, only the incompressibility condition is used, and the inviscid irrotational condition is not explicitly applied. Interestingly, the Lagrange multiplier α acts as the artificial viscosity (the diffusion coefficient) in the diffusion term of Eq. (31) for controlling the smoothness of a velocity field. From this perspective, the first-order Tikhonov regularization functional with the artificial viscosity in Eq. (31) ensures no singularity at a sharp trailing edge, which replaces the Kutta condition in the classical potential flow theory. As a special unconstrained case, the potential flow with ∇2ϕ = 0 satisfies Eq. (31) when the Lagrange multiplier is zero, where ϕ is the velocity potential. Therefore, the potential-flow solution is considered as a trivial reduced solution of Eq. (31). Different from the potential flow theory where the continuity equation is closed by introducing the velocity potential, Eq. (31) as a closed system of linear partial differential equations is obtained by introducing the smoothness constraint on a velocity field in the variational framework. In this sense, Eq. (31) describes a generalized (weak) form of the potential flow theory. Essentially, the constrained variational formulation describes an incompressible flow with the artificial viscosity, where the lift and circulation could be calculated without using the Kutta condition.
4 Conclusions
The theoretical evidences are presented at different layers to prove that no lift can be generated in a steady inviscid flow. The physical meaning of D’Alembert’s paradox of lift and drag is examined, indicating that the lift cannot be generated in a 3D steady incompressible inviscid irrotational flow. The apparent dilemma of the K-J theorem that coexists with D’Alember’s paradox of drag in the potential flow theory can be resolved only in the viscous-flow framework. In fact, the Kutta condition applied to a sharp trailing edge to determine the circulation is a viscous-flow condition naturally compatible to the K-J theorem. Further, the BEF-based force expression indicates that the force (both the lift and drag) of a body in steady incompressible inviscid flow is zero. From the perspective of the vortex lift exclusively contributed by the Lamb vector, the vorticity as a key element of lift generation is created on a solid wall through its viscous coupling with the surface pressure gradient. In summary, without the fluid viscosity, the circulation and lift cannot be generated.
In the variational theory of lift, a smoothness constraint functional is introduced to remove the singularity at a sharp trailing edge in a velocity field to determine the circulation, which is consistent with the Kutta condition in this sense. In particular, in the variational formulation based on the continuity equation with the first-order Tikhonov regularization functional, the Euler-Lagrange equation is derived, indicating that the smoothness constraint functional represents a diffusion term with the Lagrange multiplier as an artificial viscosity. Therefore, this constrained variational formulation simulates an incompressible flow with the artificial viscosity where the circulation and lift can be calculated. This reveals the role of the artificial viscosity in the determination of the circulation and lift. However, the variational formulation as an alternative to the Kutta condition cannot be used as a physical evidence supporting the questionable argument that the lift can be generated in a steady inviscid flow.
Availability of data and materials
Not applicable.
References
Anderson JD (1997) A history of aerodynamics. Cambridge University Press, Cambridge, Chapter 1. https://doi.org/10.1017/CBO9780511607158
Gonzalez C, Taha HE (2022) A variational theory of lift. J Fluid Mech 941:A58. https://doi.org/10.1017/jfm.2022.348
Anderson JD (1991) Fundamentals of aerodynamics, 2nd edn. McGraw-Hill, New York
Katz J, Plotkin A (2001) Low-speed aerodynamics, 2nd edn. Cambridge University Press, Cambridge. https://doi.org/10.1017/CBO9780511810329
Jowkowski N (1906) De la chute dans I'air de Corps l_egers de Forme allong_ee, Anim_es d'un Mouvement Rotatoire. Bulletin de I'Institute Aerodynamic de Koutchino, Fascicule 1, St Petersbourg
Landau LD, Lifshitz EM (1987) Fluid mechanics. Course of theoretical physics, Vol. 6 (2nd edn). Pergamon Press, New York. https://doi.org/10.1016/C2013-0-03799-1
Batchelor GK (2000) An introduction to fluid dynamics (2nd edn). Cambridge University Press, Cambridge. https://doi.org/10.1017/CBO9780511800955
Spalart PR (2015) Extensions of d’Alembert’s paradox for elongated bodies. Proc R Soc A 471(2181):20150106. https://doi.org/10.1098/rspa.2015.0106
Eyink GL (2021) Josephson-Anderson relation and the classical D’Alembert paradox. Phys Rev X 11:031054. https://doi.org/10.1103/PhysRevX.11.031054
Koptev AV (2017) D’Alembert’s paradox in near real conditions. J Sib Fed Univ Math Phys 10(2):170–180. https://doi.org/10.17516/1997-1397-2017-10-2-170-180
de Sá CVS, von Borries Lopes A (2022) An instructive derivation of D’Alembert’s paradox. Eur J Phys 43:015004. https://doi.org/10.1088/1361-6404/ac329a
Glauert H (1983) The elements of aerofoil and airscrew theory (2nd edition). Cambridge University Press, Cambridge. https://doi.org/10.1017/CBO9780511574481
Prandtl L, Tietjens OG (1934) Fundamentals of hydro- and aeromechanics. Dover Publications, New York
McLean D (2012) Understanding aerodynamics: arguing from the real physics. Wiley, New York. https://doi.org/10.1002/9781118454190
Sears WR (1976) Unsteady motion of airfoil with boundary-layer separation. AIAA J 14(2):216–220
von Kármán T, Burgers JM (1935) General aerodynamic theory — perfect fluids. In: Durand WF (ed) Aerodynamic Theory, vol II. Dover, New York, pp 1–24
Bryant LW, Williams DH, Taylor GI (1926) An investigation of the flow of air around an aerofoil of infinite span. Phil Trans Roy Soc A 225:199–237
Taylor GI (1926) Note on the connection between the lift in an airfoil in a wind and the circulation round it. Phil Trans Roy Soc A 225:238–245
Liu T (2021) Evolutionary understanding of airfoil lift. Adv Aerodyn 3:37. https://doi.org/10.1186/s42774-021-00089-4
Liu T, Wang S, Zhang X et al (2015) Unsteady thin-airfoil theory revisited: application of a simple lift formula. AIAA J 53(6):1493–1502. https://doi.org/10.2514/1.J053439
Liu T, Wang S, He G (2017) Explicit role of viscosity in generating lift. AIAA J 55(11):3990–3994. https://doi.org/10.2514/1.J055907
Liu T, Misaka T, Asai K et al (2016) Feasibility of skin-friction diagnostics based on surface pressure gradient field. Meas Sci Technol 27(12):125304. https://doi.org/10.1088/0957-0233/27/12/125304
Chen T, Liu T, Wang LP et al (2019) Relations between skin friction and other surface quantities in viscous flows. Phys Fluids 31(10):107101. https://doi.org/10.1063/1.5120454
Liu T (2018) Skin-friction and surface-pressure structures in near-wall flows. AIAA J 56(10):3887–3896. https://doi.org/10.2514/1.J057216
Chen T, Liu T, Dong ZQ et al (2021) Near-wall flow structures and related surface quantities in wall-bounded turbulence. Phys Fluids 33(6):065116. https://doi.org/10.1063/5.0051649
Wang S, Zhang X, He G et al (2013) A lift formula applied to low-Reynolds-number unsteady flows. Phys Fluids 25(9):093605. https://doi.org/10.1063/1.4821520
Wang S, Zhang X, He G et al (2015) Evaluation of lift formulas applied to low Reynolds number flows. AIAA J 53(1):161–175. https://doi.org/10.2514/1.J053042
Wu JZ, Pan ZL, Lu XY (2005) Unsteady fluid-dynamic force solely in terms of control-surface integral. Phys Fluids 17(9):098102. https://doi.org/10.1063/1.2055528
Wu JZ, Ma HY, Zhou MD (2006) Vorticity and vortex dynamics. Springer Berlin, Heidelberg
Wu JZ, Liu LQ, Liu T (2018) Fundamental theories of aerodynamic force in viscous and compressible complex flows. Prog Aero Sci 99:27–63. https://doi.org/10.1016/j.paerosci.2018.04.002
Lighthill MJ (1963) Introduction: boundary layer theory. Laminar boundary layers. Oxford University Press, Oxford
Lighthill MJ (1995) Fluid mechanics. In: Brown LM, Pais A, Pippard SB (eds) Twentieth century physics, Vol II, Chapter 10. American Institute of Physics, College Park, pp 795–912
Zhu JY, Liu TS, Liu LQ et al (2015) Causal mechanism in airfoil-circulation formation. Phys Fluids 27(12):123601. https://doi.org/10.1063/1.4937348
Craig PP, Pellam JR (1957) Observation of perfect potential flow in superfluid. Phys Rev 108(5):1109. https://doi.org/10.1103/PhysRev.108.1109
Chen T, Liu T (2022) Exact relations between Laplacian of near-wall scalar fields and surface quantities in incompressible viscous flow. (submitted)
Hunt JCR, Wray AA, Moin P (1988) Eddies, streams, and convergence zones in turbulent flows. In: Proceedings of the 1988 summer program, Center for Turbulence Research Report, pp 193–208
Tikhonov AN, Arsenin VY (1977) Solutions of ill-posed problems. Winston and Sons, Washington DC
Acknowledgements
The author would like to thank Shizhao Wang and Tao Chen for their comments.
Funding
The John O. Hallquist Endowed Professorship and Presidential Innovation Professorship at Western Michigan University.
Author information
Authors and Affiliations
Contributions
T. Liu contributes all the contents in this paper. The author read and approved the final manuscript.
Authors’ information
T. Liu is the John O. Hallquist Endowed Professor and Presidential Innovation Professor at Western Michigan University. He received his Ph.D. in aeronautics and astronautics from Purdue University (West Lafayette, IN, USA) in 1996. He was a research scientist at NASA Langley Research Center (Hampton, VA, USA) in 1999–2004. His research areas are experimental and applied aerodynamics and fluid mechanics. In particular, he has contributed to image-based measurement techniques for various physical quantities such as surface pressure, temperature/heat-transfer, skin friction, velocity fields, aeroelastic deformation, and distributed and integrated forces. His topics also include videogrammetry and vision for aerospace applications, flow control, flapping flight, flight vehicle design, turbulence and transition, and flight tests.
Corresponding author
Ethics declarations
Competing interests
The author declare that he has no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Liu, T. Can lift be generated in a steady inviscid flow?. Adv. Aerodyn. 5, 6 (2023). https://doi.org/10.1186/s42774-023-00143-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s42774-023-00143-3