
Abstract
In this study, the (2+1)-dimensional combined potential Kadomtsev-Petviashvili with B-type Kadomtsev–Petviashvili equation is investigated via two diverse techniques. Firstly, we retrieve the bilinear form of given equation by utilizing Hirota bilinear method. Consequently, the lump waves and collisions among lumps and periodic waves, the collision between lump wave and single, double-kink soliton solutions, the collision among lump, periodic, and single, double-kink soliton solutions as well as periodic wave soliton solutions for the given model are constructed. Lastly, the polynomial-expansion method is implemented to acquire the exact travelling wave solution to the equation. Moreover, 3D, contour and 2D graphs are used to demonstrate the physical nature of many intriguing exact solutions. A wide range of nonlinear partial differential equations can be solved using the considered methods.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Nonlinear evolution equations (NLEEs) are important in a variety of scientific and technological fields. Nonlinear wave structures have aroused the interest of many academics in recent decades due to their multiple properties seen in various disciplines of modern sciences. In the existence of solitary waves, nonlinear evolution models are employed to simulate the effect of surface for deep water and weakly nonlinear dispersive long waves. As a result, exact solutions of corresponding models are essential for studying dynamical structures and other features of physical phenomena in a variety of fields, including electromagnetism, physical chemistry, geophysics, ionised physics, elastic medium, fluid motion, fluid mechanics, elastic medium, nuclear physics, electrochemistry, optical fibres, energy physics, chemical mechanics, gravity, biostatistics, statistical and natural physics. Recently, bilinear approaches are more frequently used by renowned researcher to deal with many interesting models. Consequently, various forms of solitonic structures are elaborated in the form of lump solution [1], N-soliton solution [2], breather solution [3], bright soliton solution [4], soliton solution [5], dark soliton solution [6], Multiple-soliton solution [7, 8] and interaction solutions [9, 10]. A specific form of rational localized wave solution that decays algebraically to the background wave in space direction is known as the lump wave solution. The lump wave solution was first discovered in the study of Kadomtsev-Petviashvili equation. Consequently, finding lump-type wave solutions to nonlinear evolution equations and examining their dynamical behaviour have gained alot of attention in the field of nonlinear wave theory. The study of explicit solutions for various soliton equations has played a significant role in modern mathematics with implications in a variety of fields including mathematics, physics and other sciences. There are several well-established approaches for obtaining the exact solutions to various nonlinear models in the literature [11,12,13,14,15].
It is well acknowledged that the construction of exact solutions and the study of integrable properties for NLEEs play a significant role in various nonlinear physical and mathematical events. Such models play a key role to study a wide range of dynamical wave structures efficiently that occur in the real world and can be found in a variety of domains, including physics [16], applied mathematics [17] and engineering sciences [18]. There are numerous methods for obtaining their exact solutions, such as exp-function method [19, 20], Hirota bilinear method [21, 22], Lie group method [23, 24], B\(\ddot{a}\)cklund transformation [25, 26], variable separation method [27, 28], multiple exp-function method [29, 30], Darboux transformation [31, 32], extended tanh function method [33, 34], tanh method [35, 36], homogeneous balance method [37, 38], inverse scattering method [39, 40], multiple exp-function algorithm [41, 42], homoclinic approach [43], \(\phi ^6\)-model expansion method [44], Lie symmetry analysis [45, 46].
This paper is organized as follows: The (2+1)-dimensional pKP-BKP model is described in Sect. 2. In Sect. 3, the bilinear form for Eq. (4) is obtained. While Sect. 4 is devoted to the mathematical analysis of our considered model. The travelling wave solutions are retrieved in Sect. 5. Moreover, Sect. 6 contains discussion and results. Lastly, Sect. 7 contains conclusions.
2 The (2+1)-dimensional pKP-BKP model
The Kadomtsev-Petviashvili (KP) equation explains waves that are weakly dispersed [47, 48] with modest amplitudes propagating. The KP equation is an dispersive integrable equation with many soliton solutions that can be expressed in the Lax form. The KP hierarchy is a multi-dimensional structure with infinite dimensions with a variety of distinct formulations and symmetries. The B-type KP (B-KP) equation, as part of the KP-category equations, have garnered a significant amount of recent research in fluid dynamics and other areas [49, 50].
The (2 + 1)-dimensional integrable KP model may be expressed as [51]
Substituting \(\mu =\mu _{x}\) and using integration, the potential KP (pKP) equation
is obtained using Eq. (1). Moreover, the (2 + 1)-dimensional integrable B-KP equation may be expressed as
The N-soliton solutions and infinite dimensional Lie algebra structures for Eqs. (1) and (3) are studied recently using various Hirota bilinear forms [52,53,54]. Consequently, a combined pKP-BKP equation is proposed, that can be expressed as [55]
where \(\alpha _i\)(i= 1, 2,..., 6) are constants. If \(\alpha _1\) = \(\alpha _3\) = \(\alpha _4\) = 0, \(\alpha _2\) = \(\alpha _5\) =1, \(\alpha _6\) = -1, then Eq. (4) represents the pKP Eq. (2), that admits the weakly dispersive waves in a paraxial wave approximation and can alternatively be characterised as the evolution of lengthy ion-acoustic waves of modest amplitude propagating in plasma physics. However, if \(\alpha _1\) = \(\alpha _5\) =1, \(\alpha _2\) = \(\alpha _4\) = 0, \(\alpha _3\)= 5, \(\alpha _6\) = -5, Eq. (4) illustrates the BKP Eq. (3), that is a significant physical model that owns the isospectral soliton and may be characterised as waves in a particular form of nonuniform medium. Recently, a wide range of fresh analysis towards exact solutions to the given model (4) have been published. The N-soliton solution were constructed in [56]. The resonant multi-soliton, M-breather, M-lump and hybrid solutions were obtained in [57]. Lastly, the explicit solution and its soliton molecules were retrieved in [58].
3 Bilinear form of 4
The bilinear approach was first proposed by Hirota [59] in 1971 for constructing multiple solutions to integral nonlinear evolutionary equations. The main idea behind this technique is to employ some dependent variable transformation to change the NLEE in a form where the unknown function appears bilinearly. The bilinear approach is one of the most essential and extensively used methods for solving nonlinear partial differential equations. This strategy is based on using suitable transformations to convert nonlinear models into bilinear forms. Then, on the basis of the bilinear forms, N-soliton solutions, kink solutions, rational solutions, lump solutions, breather solutions, periodic soliton solutions and other exact solutions can be derived. To acquire the bilinear form of Eq. (4), we apply the transformation
Consequently, we retrieve the bilinear form as
so that the function D fulfills
As a result, we get
obviously if F meets Eq. (4), then \(\mu =2[ln F]_{x}\) produces the solution of specified model (4) instantly.
4 Mathematical analysis
In this section, several significant forms are employed to extract the analytical solutions of Eq. (4).
4.1 Lump wave solutions
In this portion, we examine the operator F given by
where
while \(l_i,~m_i\)’s, g are the constants to be determined. Using Eq. (7) into Eq. (6), we have a system of equations with several parameters. We get the following findings by resolving them utilizing a computational programme such as Mathematica.
Case 1:
here \(l_1\), \(l_2\) \(m_1\), \(m_2\), g are free parameters. Hence utilizing all the above known values, Eq. (7) gives
Utilizing the above result together with Eq. (5), we gain \(\mu _1(x,y,t)\).
Case 2:
where \(l_2\), \(m_1\), \(m_2\), g are free parameters. Hence utilizing all the above known values, Eq. (7) gives
Utilizing Eq. (8) together with Eq. (5), we obtain the solution
Case 3:
where \(l_1\), \(l_2\), \(l_3\), g are free parameters. Hence utilizing all the above known values, Eq. (7) gives
Utilizing Eq. (10) together with Eq. (5), we retrieve the solution
4.2 Collision among lump wave and strip soliton
In this fragment, we use the operator
where
while \(l_i,~m_i,~n_i\)’s are the constants to be determined. These substitutions for \(\xi _1\), \(\xi _2\), and \(\xi _3\) will be applicable throughout this paper. Using Eq. (12) into Eq. (6), we have a system of equations with several parameters. We get the following findings by resolving them utilizing a computational programme such as Mathematica. Case 1:
here \(n_0\), \(n_1\), \(n_2\), \(\omega _0\), \(\omega _3\) are free parameters. Hence utilizing all the above known values, Eq. (12) gives
Utilizing Eq. (13) together with Eq. (5), we acquire the solution
Case 2:
while \(l_0\), \(l_1\), \(l_2\), \(m_0\), \(m_1\), \(m_2\), \(\omega _1\), \(\omega _2\) are free parameters.
Utilizing all the above determined parameters in Eq. (12) and with the aid of Eq. (5), we have \(\mu _5(x,y,t)\).
Case 3:
where \(l_0\), \(l_3\), \(m_0\), \(m_1\), \(m_3\), \(\omega _1\) are free parameters.
Hence utilizing all the above known values, Eq. (12) gives
Utilizing Eq. (15) together with Eq. (5), we gain \(\mu _6(x,y,t)\).
Case 4:
where \(l_0\), \(l_1\), \(l_3\), \(m_0\), \(m_1\), \(m_3\), \(\omega _1\) are free parameters.
Hence utilizing all the above known values, Eq. (12) gives
Utilizing Eq. (16) together with Eq. (5), we gain \(\mu _7(x,y,t)\).
4.3 Collision between lump wave and double stripes soliton
In this subsection, we review the operator F stated as
Using Eq. (17) into Eq. (6), we have a system of equations with several parameters. We get the following findings by resolving them utilizing a computational programme such as Mathematica.
Case 1:
where \(n_0\), \(n_1\), \(n_2\), \(\omega _3\) are free parameters.
Hence utilizing all the above known values, Eq. (17) gives
Utilizing Eq. (18) together with Eq. (5), we retrieve the solution
Case 2:
where \(l_0\), \(l_2\), \(m_0\), \(m_1\), \(m_2\), \(m_3\), \(\omega _1\) are free parameters.
Hence utilizing all the above known values, Eq. (17) gives
Utilizing Eq. (19) together with Eq. (5), we gain \(\mu _9(x,y,t)\).
Case 3:
where \(l_0\), \(l_1\), \(l_2\), \(m_0\), \(m_2\), \(\omega _1\), \(\omega _2\) are free parameters.
Hence utilizing all the above parameters, Eq. (17) gives
Utilizing Eq. (20) together with Eq. (5), we have \(\mu _{10}(x,y,t)\).
Case 4:
where \(n_0\), \(n_1\), \(n_3\), \(\omega _3\) are free parameters.
Utilizing all the above determined parameters in Eq. (17) and with the aid of Eq. (5), we gain \(\mu _{11}(x,y,t)\).
4.4 Collision between lump and periodic waves
In this portion, we examine the operator F specified by
Using Eq. (21) into Eq. (6), we have a system of equations with several parameters. We get the following findings by resolving them utilizing a computational programme such as Mathematica.
Case 1:
where \(n_0\), \(n_1\), \(n_2\), \(\omega _3\) are free parameters.
Hence utilizing all the above known values, Eq. (21) gives
Utilizing Eq. (22) together with Eq. (5), we obtain the solution
Case 2:
where \(l_0\), \(l_1\), \(l_2\), \(m_0\), \(m_1\), \(m_3\), \(\omega _1\) are free parameters.
Hence utilizing all the above parameters, Eq. (21) gives
Utilizing Eq. (23) together with Eq. (5), we retrieve the solution \(\mu _{13}(x,y,t)\).
Case 3:
where \(l_0\), \(l_1\), \(l_2\), \(m_0\), \(m_1\), \(m_2\), \(\omega _1\), \(\omega _2\) are free parameters.
Utilizing all the above determined parameters in Eq. (21) and with the aid of Eq. (5), we gain \(\mu _{14}(x,y,t)\).
Case 4:
where \(n_0\), \(n_1\), \(n_3\), \(\omega _3\) are free parameters.
Utilizing all the above determined parameters in Eq. (21) and with the aid of Eq. (5), we have \(\mu _{15}(x,y,t)\).
4.5 Collision among lump wave and double stripes soliton
Here, we get the operator F of the form
Using Eq. (24) into Eq. (6), we have a system of equations with several parameters. We get the following findings by resolving them utilizing a computational programme such as Mathematica.
Case 1:
where \(n_0\), \(n_1\), \(n_2\), \(\omega _2\), \(\omega _3\) are free parameters.
Utilizing all the above determined parameters in Eq. (24) and with the aid of Eq. (5), we gain \(\mu _{16}(x,y,t)\).
Case 2:
where \(m_0\), \(m_1\), \(m_2\), \(n_0\), \(n_1\), \(n_2\), \(\omega _2\), \(\omega _3\) are free parameters.
Utilizing all the above determined parameters in Eq. (24) and with the aid of Eq. (5), we retrieve the solution \(\mu _{17}(x,y,t)\).
4.6 Periodic wave soliton
Lastly, we get the operator F as
Using Eq. (25) into Eq. (6), we have a system of equations with several parameters. We get the following findings by resolving them utilizing a computational programme such as Mathematica.
Case 1:
where \(l_0\), \(l_1\), \(l_2\), \(\omega _1\), \(\omega _2\) are free parameters.
Hence utilizing all the above known values, Eq. (25) gives
Utilizing the above result together with Eq. (5), we gain \(\mu _{18}(x,y,t)\).
Case 2:
where
where \(l_0\), \(l_1\), \(m_0\), \(m_1\), \(m_2\), \(\omega _1\), \(\omega _3\) are free parameters.
Utilizing all the above determined parameters in Eq. (25) and with the aid of Eq. (5), we get the solution \(\mu _{19}(x,y,t)\).
5 Travelling-wave solutions for Eq. (4)
In this section, we employ the polynomial-expansion method to find some new exact travelling wave solutions for Eq. (4). Consequently, we use the transformation stated as
where a, b are constants and c is the velocity of the wave. Substituting Eq. (26) into Eq. (4), we have
through integration, we retrieve the result
Utilizing the specified method, we suppose the solution for Eq. (28) given by
while \(\phi (\eta )\) satisfies
here \(\xi _0\), \(\xi _{j}\)’s, \(\zeta _{j}\)’s, \({\mathcal {R}}\), \({\mathcal {Q}}\) are constants and m is a positive integer. As a result, we retrieve the following exact solutions:
(1) when \({\mathcal {R}}=0\), \({\mathcal {Q}}=0\),
(2) when \({\mathcal {R}}\ne 0\), \({\mathcal {Q}}=0\),
here \({\mathcal {C}}_0\) is the constant of integration;
(3) when \({\mathcal {R}}=0\), \({\mathcal {Q}}\ne 0\),
If \(Q>0\), then
If \(Q<0\), then
(4) when \({\mathcal {R}}\ne 0\), \({\mathcal {Q}}\ne 0\),
where
here \({\mathcal {C}}_1\) is the constant of integration.
Comparing \(\Omega ^{(5)}(\eta )\) with \(\Omega '(\eta ) \Omega ^{(3)}(\eta )\) in Eq. (28) we have \(m = 1\). As a result, Eq. (29) can be expressed as
Utilizing Eq. (34) together with Eq. (30) into Eq. (28) and balancing the coefficients of \(\phi ^i(\eta )\) to zero, we have a set of equations involving several parameters. We get the following findings by resolving them utilizing a computational programme such as Mathematica. Set 1:
where
Set 2:
Set 3:
Set 4:
Hence utilizing all the above determined results, we construct the travelling-wave solutions for Eq. (4) as
Type 1: When \({\mathcal {R}}=0\) and \({\mathcal {Q}}=0\), we get the solution
where
Type 2: When \({\mathcal {R}}\ne 0\) and \({\mathcal {Q}}=0\), we obtain the solution
where
Type 3: When \({\mathcal {R}}=0\) and \({\mathcal {Q}}>0\), we attain the solution
where
Type 4: When \({\mathcal {R}}=0\) and \({\mathcal {Q}}<0\), we retrieve the solution
where
Type 5: When \({\mathcal {R}}=0\) and \({\mathcal {Q}}<0\), we have
where
6 Discussion and results
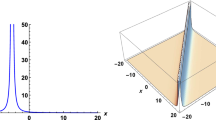
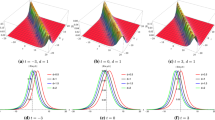
The graphical description of the (2+1)-dimensional pKP-BKP equation are demonstrated in this section. Using a specified range of values, various forms of v-shaped, singular bell-shaped, periodic and bright solitons are displayed. Figure 1 depicts the profiles of \(|\mu _1(x,y,t)|\) which exhibits a v-shaped soliton solution using constants \(\alpha _2=2,~\alpha _3=-1.5,~\alpha _4=0.4,~\alpha _5=0.5,~\alpha _6=0.75,~g=2.5,~l_1=0.4,~l_2=0.5,~m_1=-1.5,~m_2=0.45\). Moreover, Figs. 2,3,4,5,6 represent the v-shaped soliton solutions for various constant values. Figure 7 represents the behaviour of solution \(|\mu _3(x,y,t)|\) which illustrates the singular bell shaped solution using parameters \(\alpha _4=0.45,~\alpha _5=0.55,~\alpha _6=0.75,~=2.5,~l_1=-0.4,~l_2=0.5,~l_3=0.6\). Consequently, Figs. 8,9,10,11 demonstrate the singular bell shaped solutions for specified parameters. Singularities may exist almost anywhere and they are surprisingly abundant in the mathematics used by physicists to understand the universe. Figure 12 depicts the behaviour of solution \(|\mu _{12}(x,y,t)|\) which describes the periodic solitary waves solution utilizing constants \(\alpha _2=0.55,~\alpha _3=0.5,~\alpha _4=0.45,~\alpha _5=0.5,~\alpha _6=0.75,~n_0=0.15,~n_1=0.95,~n_2=-0.95\). Moreover, Figure 13 display the periodic solitary waves solutions for various constant values. Figure 14 represents the profiles of \(|\mu _{16}(x,y,t)|\) which illustrates the bright soliton solution utilizing parameters \(\alpha _1=1.2,~\alpha _2=2,~\alpha _3=-1.5,~\alpha _4=0.4,~\alpha _5=0.5,~\alpha _6=0.75,~m_0=0.5,~n_0=-0.85,~n_1=0.225,~n_2=0.8,~\omega _2=0.75,~\omega _3=0.65\). Also, Figs. 15, 16 demonstrate the bright soliton solution for specified parameters. Lastly, we have illustrated 3D, contour and 2D graphs of various retrieved solutions to have a better understanding of the behaviour of solutions.

3D, contour and 2D plots for \(|\mu _1(x,y,t)|\) with \(\alpha _2=2,~\alpha _3=-1.5,~\alpha _4=0.4,~\alpha _5=0.5,~\alpha _6=0.75,~g=2.5,~l_1=0.4,~l_2=0.5,~m_1=-1.5,~m_2=0.45\)

3D, contour and 2D plots for \(|\mu _3(x,y,t)|\) with \(\alpha _4=0.45,~\alpha _5=0.55,~\alpha _6=0.75,~=2.5,~l_1=-0.4,~l_2=0.5,~l_3=0.6\)

3D, contour and 2D plots for \(|\mu _4(x,y,t)|\) with \(\alpha _1=0.2,~\alpha _2=0.25,~\alpha _3=2.5,~\alpha _4=0.4,~\alpha _5=0.5,~\alpha _6=0.75,~n_0=0.7,~n_1=-1.5,~n_2=0.75,~n_3=0.25,~\omega _0=1.755,~\omega _3=-0.6\)

3D, contour and 2D plots for \(|\mu _6(x,y,t)|\) with \(\alpha _1=0.15,~\alpha _2=0.2,~\alpha _3=0.4,~\alpha _4=0.3,~\alpha _5=0.5,~\alpha _6=0.85,~l_0=0.1,~l_3=0.4,~m_0=0.5,~m_1=0.25,~m_3=0.35,~\omega _1=0.5\)

3D, contour and 2D plots for \(|\mu _8(x,y,t)|\) with \(\alpha _2=0.55,~\alpha _3=0.5,~\alpha _4=0.45,~\alpha _5=0.5,~\alpha _6=0.75,~n_0=0.15,~n_1=0.75,~n_2=-0.65\)

3D, contour and 2D plots for \(|\mu _{10}(x,y,t)|\) with \(\alpha _4=0.45,~\alpha _5=0.5,~\alpha _6=0.85,~l_0=0.15,~l_1=0.3,~l_2=0.35,~m_0=0.4,~m_2=0.25,~m_3=0.35,~\omega _1=0.5,~\omega _2=0.6\)

3D, contour and 2D plots for \(|\mu _{12}(x,y,t)|\) with \(\alpha _2=0.55,~\alpha _3=0.5,~\alpha _4=0.45,~\alpha _5=0.5,~\alpha _6=0.75,~n_0=0.15,~n_1=0.95,~n_2=-0.95\)

3D, contour and 2D plots for \(|\mu _{13}(x,y,t)|\) with \(\alpha _4=0.45,~\alpha _5=0.5,~\alpha _6=0.75,~l_0=0.5,~l_1=-2.75,~l_2=2.55,~m_0=0.5,~m_1=1.25,~m_3=1.55,~\omega _1=0.5\)

3D, contour and 2D plots for \(|\mu _{15}(x,y,t)|\) with \(\alpha _2=0.55,~\alpha _3=0.5,~\alpha _4=0.45,~\alpha _5=0.5,~\alpha _6=0.75,~n_0=0.15,~n_1=1.95,~n_3=0.95\)

3D, contour and 2D plots for \(|\mu _{16}(x,y,t)|\) with \(\alpha _1=1.2,~\alpha _2=2,~\alpha _3=-1.5,~\alpha _4=0.4,~\alpha _5=0.5,~\alpha _6=0.75,~m_0=0.5,~n_0=-0.85,~n_1=0.225,~n_2=0.8,~\omega _2=0.75,~\omega _3=0.65\)

3D, contour and 2D plots for \(|\mu _{17}(x,y,t)|\) with \(\alpha _1=0.45,~\alpha _2=0.25,~\alpha _3=0.25,~\alpha _4=0.3,~\alpha _5=0.4,~\alpha _6=0.35,~m_0=0.125,~m_1=0.35,~m_2=0.25,~n_0=0.125,~\omega _2=0.55,~\omega _3=0.75\)

3D, contour and 2D plots for \(|\mu _{18}(x,y,t)|\) with \(\alpha _1=0.15,~\alpha _2=0.25,~\alpha _3=0.5,~\alpha _4=0.4,~\alpha _5=0.5,~\alpha _6=0.55,~l_0=0.25,~l_1=-0.75,~l_2=0.35,~\omega _1=0.5,~\omega _2=0.85\)

3D, contour and 2D plots for \(|\mu _{19}(x,y,t)|\) with \(\alpha _1=0.2,~\alpha _2=0.25,~\alpha _3=0.5,~\alpha _4=0.4,~\alpha _5=0.5,~\alpha _6=0.55,~l_0=0.5,~l_1=0.65,~m_0=0.5,~m_1=0.75,~m_2=0.35,~\omega _1=1,~\omega _3=1\)

3D, contour and 2D plots for \(|\mu _{21}(x,y,t)|\) with \(a=0.7,~b=0.5,~c=0.5,~\alpha _1=0.6,~\alpha _2=1.2,~\alpha _3=0.5,~\alpha _4=0.45,~\alpha _5=0.55,~\alpha _6=0.75,~{\mathcal {C}}_0=0.5,~\xi _0=1.6\)

3D, contour and 2D plots for \(|\mu _{23}(x,y,t)|\) with \(a=0.75,~b=0.55,~c=0.65,~\alpha _1=0.5,~\alpha _2=1.12,~ _3=0.45,~\alpha _4=0.5,~\alpha _5=0.65,~\alpha _6=0.5,~\xi _0=1.56\)

3D, contour and 2D plots for \(|\mu _{23}(x,y,t)|\) with \(a=0.75,~b=0.55,~c=0.55,~\alpha _1=0.56,~\alpha _2=1.12,~\alpha _3=0.65,~M=0.45,~\alpha _4=0.455,~\alpha _5=0.55,~\alpha _6=0.75,~\xi _0=1.6,~{\mathcal {C}}_1=0.5\)
7 Conclusion
In this manuscript, the (2+1)-dimensional pKP-BKP equation is investigated utilizing the Hirota bilinear method and the polynomial-expansion method. Consequently, we have generated a variety of fascinating exact solutions to the considered equation using various types of functions. Additionally, using Mathematica 11.0, we were able to generate numerous graphical representations of the specified solutions utilizing various parameters. Lastly, we assert that the methodologies under consideration are applicable to a wide range of NLEEs in mathematical physics.
Data Availability Statement
Not applicable.
Change history
26 October 2022
A Correction to this paper has been published: https://doi.org/10.1140/epjp/s13360-022-03387-y
References
Y. Zhou, Partial Differ. Equat. Appl. Math. 5 (2022) 100252
S. Zhang, X. Zheng, Nonlinear Dyn. 107(1), 1179–1193 (2022)
Q. Li, W. Shan, P. Wang, H. Cui, Communicat. Nonlinear Sci. Num. Simulat. 106, 106098 (2022)
N. Raza, Z.A. Alhussain, Opt. Quant. Electron. 54(1), 1–13 (2022)
M. Osman, Nonlinear Dynamics 96(2), 1491–1496 (2019)
A.S. Bezgabadi, M. Bolorizadeh, Results Phys. 30, 104852 (2021)
A.M. Wazwaz, Appl. Math. Comput. 199(1), 133–138 (2008)
K.S. Nisar, O.A. Ilhan, S.T. Abdulazeez, J. Manafian, S.A. Mohammed, M. Osman, Results Phys. 21, 103769 (2021)
J. Manafian, B. Mohammadi-Ivatloo, M. Abapour, Appl. Math. Comput. 356, 13–41 (2019)
J.G. Liu, W.-H. Zhu, M. Osman, W.-X. Ma, Eur. Phys. J. Plus 135(5), 1–9 (2020)
L.x. Li, E.q. Li, M.l. Wang, Appl. Math.-A J. Chinese Universities 25 (4) , 454-462 (2010)
K. Hosseini, P. Mayeli, D. Kumar, J. Modern Opt. 65(3), 361–364 (2018)
A.M. Wazwaz, Physica Scripta 89(9), 095206 (2014)
Z. Ivezic, S.M. Kahn, J.A. Tyson, B. Abel, E. Acosta, R. Allsman, D. Alonso, Y. AlSayyad, S.F. Anderson, J. Andrew et al., Astrophys. J. 873(2), 111 (2019)
M. Osman, Waves Random Complex Media 26(4), 434–443 (2016)
W. Zhang, J. Zhou, X. Zhang, Y. Zhang, K. Liu, Mod. Phys. Lett. B 33(10), 1950113 (2019)
V. Gafiychuk, B. Datsko, V. Meleshko, J. Comput. Appl. Math. 220(1–2), 215–225 (2008)
S. Banerjee, L. Rondoni, M. Mitra, Appl. Chaos Nonlinear Dyna. Sci. Eng. 2, Springer, 2012
Y. Gurefe, E. Misirli, Comput. Math. Appl. 61(8), 2025–2030 (2011)
E. Misirli, Y. Gurefe, Math. Comput. appl. 16(1), 258–266 (2011)
K.U. Tariq, R.N. Tufail, J. Ocean Eng. Sci. (2022). https://doi.org/10.1016/j.joes.2022.04.018.
J. Satsuma, Direct and Inverse Methods in Nonlinear Evolution Equations, 171-222, (2003).
G.W. Bluman, S. Kumei, Springer Science and Business Media 81 (2013)
B. Bira, T. Raja Sekhar, D. Zeidan, Math. Method Appl. Sci. 41, 6717-6725 (2018)
S. Carillo, M. Lo Schiavo, C. Schiebold, et al., SIGMA. Symmetry, Integrability and Geometry: Methods and Applications 12, 087 (2016)
R. Hirota, J. Satsuma, Prog. Theor. Phys. 57(3), 797–807 (1977)
S.y. Lou, L.L. Chen, J. Math. Phys. 40 (12), 6491–6500 (1999)
C.Q. Dai, Y.Y. Wang, Communicat. Nonlinear Sci. Numer. Simulat. 19(1), 19–28 (2014)
Y. Yildirim, E. Yasar, A.R. Adem, Nonlinear Dyn. 89(3), 2291–2297 (2017)
A.R. Adem, Inter. J. Modern Phys. B 30, 1640001 (2016)
V.B. Matveev, V. Matveev, Darboux transformations and solitons, Springer-Verlag (1991)
X. Geng, G. He, J. Math. Phys. 51(3), 033514 (2010)
Z. Xue-Dong, C. Yong, L. Biao, Z. Hong-Qing, Communicat. Theoretical Phys. 39(6), 647 (2003)
L. Zhuo-Sheng, Z. Hong-Qing, Communicat. Theoretical Phys. 39(4), 405 (2003)
M. Abdelkawy, A. Bhrawy, E. Zerrad, A. Biswas, Acta Phys. Polinica A 129(3), 278–283 (2016)
A. Bekir, Communicat. Nonlinear Sci. Numer. Simulat. 13(9), 1748–1757 (2008)
E. Zayed, S.H. Ibrahim, Chinese Phys. Lett. 29(6), 060201 (2012)
H. Jafari, N. Kadkhoda, C.M. Khalique, Comput. Math. Appl. 64(6), 2084–2088 (2012)
M.J. Ablowitz, H. Segur, Solitons and the inverse scattering transform, SIAM (1981)
M.J. Ablowitz, M. Ablowitz, P. Clarkson, P.A. Clarkson, Cambridge university press 149 (1991)
A.R. Adem, Comput. Math. Appl. 71(6), 1248–1258 (2016)
T. Moretlo, A.R. Adem, B. Muatjetjeja, Communicat. Nonlinear Sci. Num. Simulat. 106, 106072 (2022)
A. Yokus, M.A. Isah, Nonlinear Dyn. 109, 3029–3040 (2022)
A. Yokus, M.A. Isah, Opti. Quant. Electron. 54(8), 1–21 (2022)
B. Muatjetjeja, Math. Methods Appl. Sci. 40(5), 1531–1537 (2017)
M. Moroke, B. Muatjetjeja, A. Adem, J. Interdiscip. Math. 24(6), 1607–1615 (2021)
W.X. Ma, Phys. Lett. A 379(36), 1975–1978 (2015)
A. Jafarian, P. Ghaderi, A.K. Golmankhaneh, Rom. Rep. Phys. 65(1), 76–83 (2013)
S.H. Liu, B. Tian, Q.X. Qu, H. Li, X.H. Zhao, X.X. Du, S.S. Chen, Inter. J. Comput. Math. 98(6), 1130–1145 (2021)
W.S. Duan, Y.R. Shi, X.R. Hong, Phys. Lett. A 323(1–2), 89–94 (2004)
B.B. Kadomtsev, V.I. Petviashvili, Doklady Akademii Nauk. Russian Academy of Sciences. 192, 753–756 (1970)
J. Satsuma, J. Phys. soc. Japan 40(1), 286–290 (1976)
E. Date, M. Jimbo, M. Kashiwara, T. Miwa, J. Phys. Soc. Japan 50(11), 3813–3818 (1981)
R. Hirota, J. Phys. Soc. Japan 58(7), 2285–2296 (1989)
W.P. Zhong, Z. Yang, M. Belic, W. Zhong, Phys. Lett. A 395, 127228 (2021)
W.X. Ma, J. Geom. Phys. 165, 104191 (2021)
Y. Feng, S. Bilige, J. Geom. Phys. 169, 104322 (2021)
Z.Y. Ma, J.X. Fei, W.P. Cao, H.L. Wu, Results Phys. 35, 105363 (2022)
R. Hirota, Phys. Rev. Lett. 27(18), 1192 (1971)
Acknowledgements
The authors are highly grateful to the honourable reviewers for their remarkable suggestions and recommendations to improve our manuscript in the best way.
Funding
The authors did not receive support from any organization for the submitted work.
Author information
Authors and Affiliations
Contributions
KUT contributed to project administration, validation, review and editing. A.M.W contributed to conceptualization, supervision. RNT contributed to formal analysis, visualization, writing original draft.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Consent to participate
Not applicable.
Consent to publish
Not applicable.
Additional information
The original online version of this article was revised to correct the authors’ affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Tariq, K.U., Wazwaz, A.M. & Tufail, R.N. Lump, periodic and travelling wave solutions to the (2+1)-dimensional pKP-BKP model. Eur. Phys. J. Plus 137, 1100 (2022). https://doi.org/10.1140/epjp/s13360-022-03301-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1140/epjp/s13360-022-03301-6