
Abstract
The Szekeres system with cosmological constant term describes the evolution of the kinematic quantities for Einstein field equations in \({\mathbb {R}}^4\). In this study, we investigate the behavior of trajectories in the presence of cosmological constant. It has been shown that the Szekeres system is a Hamiltonian dynamical system. It admits at least two conservation laws, h and \(I_{0}\) which indicate the integrability of the Hamiltonian system. We solve the Hamilton–Jacobi equation, and we reduce the Szekeres system from \({\mathbb {R}}^4\) to an equivalent system defined in \({\mathbb {R}}^2\). Global dynamics are studied where we find that there exists an attractor in the finite regime only for positive valued cosmological constant and \(I_0<-2 .08\). Otherwise, trajectories reach infinity. For \(I_ {0}>0\) the origin of trajectories in \({\mathbb {R}}^2\) is also at infinity. Finally, we investigate the evolution of physical properties by using dimensionless variables different from that of Hubble-normalization conducing to a dynamical system in \({\mathbb {R}}^5\). We see that the attractor at the finite regime in \({\mathbb {R}}^5\) is related with the de Sitter universe for a positive cosmological constant.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
A Szekeres system is a system of algebraic-differential equations given by [1]
with algebraic constraint equation
Due to mathematical technicalities, we study three cases (i) \(6E +\rho _{D} \ne 0\), (ii) \(\rho _D=0, E\ne 0\) and (iii) \(6E + \rho _{D} = 0\). The especial case where \(\rho _D=0\) corresponds to “vacuum” case. In the case \(6E + \rho _{D} = 0\), the evolution equation (2) is that of a dust fluid (1), but with \(E<0\).
Equations (1)–(5) are the diagonal Einstein field equations \(G_{\mu \nu }-\Lambda g_{\mu \nu }=T_{\mu \nu }\) for a gravitational model where the energy-momentum tensor \(T_{\mu \nu }\) is that of a pressureless inhomogeneous fluid, \(\Lambda \) is the cosmological constant, and \(G_{\mu \nu }=R_{\mu \nu }-\frac{1}{2}Rg_{\mu \nu }\) is the Einstein tensor for the background space
Scalars \(\alpha \left( t,x,y,z\right) \) and \(\beta \left( t,x,y,z\right) \) and their time derivatives are used to obtain the field equations (1)–(5), where \(^{\left( 3\right) }R\) is the spatial curvature for the three dimensional hypersurface of the line element (6), \(\theta \) and \(\sigma \) are the kinematic quantities known as expansion rate and shear. For the comoving observer \(u^{\mu }=\delta _{t}^{\mu }\), \(u^{\mu }u_{\mu }=-1\) they are defined as \(\theta =\left( \frac{\partial \alpha }{\partial t}\right) +2\left( \frac{\partial \beta }{\partial t}\right) \) and \(\sigma ^{2}=\frac{2}{3}\left( \left( \frac{\partial \alpha }{\partial t}\right) -\left( \frac{\partial \beta }{\partial t}\right) \right) ^{2}\,\). Function \(\rho _{D}=\rho \left( t,x,y,z\right) \) describes the inhomogeneous energy density for the pressureless fluid, and \(E=E\left( t,x,y,z\right) \) is the electric component of the Weyl tensor \(E_{\nu }^{\mu }=\) \(Ee_{\nu }^{\mu }\). The dot in Eqs. (1), (2), (3), (4), remarks derivative with respect to the time parameter. Equation (1) is the continuous equation for the pressureless fluid, \(T_{~;\nu }^{\mu \nu }=0\), while the rest of the equations are the four diagonal Einstein field equation. Moreover, nondiagonal components of the Einstein field equations are the propagation equations [2]: \(h_{\mu }^{\nu }\sigma _{\nu ;\alpha }^{\alpha }=\frac{2}{3}h_{\mu }^{\nu }\theta _{;\nu }\), \(~h_{\mu }^{\nu }E_{\nu ;\alpha }^{\alpha }=\frac{1}{3}h_{\mu }^{\nu }\rho _{;\nu }\) where \(h_{\mu \nu }\) is the projection tensor defined as \(h_{\mu \nu }=g_{\mu \nu }-u_{\mu }u_{\nu }\).
The above gravitational model with the zero-valued cosmological term was investigated by Szekeres in [3]. It was found that the spacetime (6) describes inhomogeneous Friedmann–Lemaître–Robertson–Walker (-like) universes with one scale factor which satisfies the Friedmann equations, or inhomogeneous anisotropic Kantowski–Sachs (-like) with two scale factors. These spacetimes were one of the first families of cosmological inhomogeneous exact solutions in the literature. The case with a nonzero cosmological constant term investigated [4, 5] where it was found that because of the cosmological constant inflationary solutions exist. The main characteristic, by the construction of the Szekeres system is that their magnetic part of the Weyl tensor is zero, and there is not any pressure term, which means that there is no information propagation through gravitational waves or sound. Consequently, Szekeres spacetimes belong to the family of Silent universes [6]. For other extensions of the Szekeres system, we refer the reader to [7,8,9]. Inhomogeneous exact solutions are of special interest in cosmological studies (for a discussion we refer the reader to [10,11,12,13,14,15,16,17]).
Because of its importance in physical applications, the Szekeres system has been widely investigated in the literature. With the use of Darboux polynomials and Jacobi’s last multiplier method, the integrability of the Szekeres system with zero cosmological constant terms was found in [18]. Specifically, three time-independent conservation laws where derived which were used to reduce the four-dimensional Szekeres system into a two-dimensional system. Moreover, the analytic solution for the reduced two-dimensional system is presented in [19]. Furthermore, in [20] a Lagrangian function was derived for the Szekeres system, which means that the system (1), (2), (3), (4), with constraint (5), follows from a variational principle. The corresponding conservation laws were derived according to Noether’s theorem. In addition, it was found that the Szekeres system possesses the Painlevé property [21]. Because the Lagrangian function of the Szekeres system is a point-like Lagrangian, in [22] it was used to quantize for the first time the Szekeres system. The probability function was derived, while it was found that the singular asymptotic solution is preferred by the quantization, on the other hand, the quantum potentiality of the Szekeres system by Lie symmetries [23] was the subject of study in [24]. Moreover, the conservation laws for the Szekeres system with a nonzero cosmological constant term were derived recently in [25].
In [26, 27], Libre et al, performed a detailed analysis on the dynamics of the Szekeres system with a zero cosmological constant in the Poincare disk. It was found that the orbits come from the infinity of \({\mathbb {R}}^{4}\) and go to infinity. In this study, we extend this analysis by considering a nonzero cosmological constant term. As we shall see, for \(\Lambda >0\), it is possible to have an attractor at the finite regime, which can be related to the de Sitter universe provided by the field equations. The plan of the paper is as follows.
In Sect. 2 we review previous results on the derivation of the Lagrangian function which describes the dynamical system (1), (2), (3), (4), with constraint (5). Moreover, we present the conservation laws, and we solve the Hamilton–Jacobi equation to reduce the four-dimensional system into a system of two first-order differential equations. The dynamics for the reduced two-dimensional system are investigated in Sects. 3 and 4 . For the completeness of our analysis, we study the stationary points and the evolution of the trajectories in the finite variables as also at the infinity by using the variables of the Poincare disk.
Furthermore, to understand the properties of the physical variables during the evolution of the cosmological history, we define new dimensionless variables, like that of the Hubble-normalization [28]. In the new variables, the dynamical system is defined in \({\mathbb {R}}^{5}\). Every stationary point on \({\mathbb {R}}^{5}\) corresponds to a specific epoch of the cosmological history, which is explicitly described by an analytic solution. From the stability properties of the stationary points, we can infer information about the evolution of the model. Such analysis has been applied in various gravitational models in the past, with interesting results [29,30,31,32,33,34,35,36,37,38]. For the Szekeres system without the cosmological constant term, this analysis was performed in [6]. However, in [6] the Hubble-normalization approach was applied, which means that in their study, the expansion rate has been limited to be only positive \(\theta >0\), or negative \(\theta <0\). However, given \(\theta \) can change its sign, which means that static spacetimes with \(\theta =0\) are possible, then we require new dimensionless variables [39] to avoid the blowing up of solutions as \(\theta \) passes through zero. In “Appendix A” we present the analysis for the case with \(\Lambda =0\), and we recover previously published results [26]. In Sect. 5, we present a detailed analysis of the asymptotic solutions for field equations in dimensionless variables different from that of the Hubble normalization. We find that \(\theta \) can change the sign in two stationary points which describe the Minkowski universe and the closed Friedmann–Lemaître–Robertson–Walker (-like) spacetime. Finally, in Sect. 6, we summarize our results and draw our conclusions.
2 Hamiltonian system
Solving equations (1) and (2) for \(\theta \) and \(\sigma \) (assuming \(\rho _D (6 E+\rho _D )\ne 0\)) we obtain
Substituting expressions (7) and (8) in Eqs. (3) and (4), we obtain the second-order differential equations
Using the parametrization (we assume \(x\ne y, y\ne 0\))
where the inverse transformation is [20]
and replacing in Eqs. (9) and (10) we end with the system of two-second-order differential equations [25]
Equation (14) can be integrated as
which is a conservation law for the Szekeres system. In addition, for the system (13), (14) we can easily solve the inverse problem and construct a Lagrangian function where under the variation will produce the equations of motions.
Indeed, the point-like Lagrangian which describes equations (13) and (14) is the two-dimensional Lagrangian
Hence, we define the momentum \(p_{x}=\frac{\partial L}{\partial {\dot{x}}}\) and \(p_{y}=\frac{\partial L}{\partial {\dot{y}}}\), i.e. \(p_{x}={\dot{y}}\) and \(p_{y}={\dot{x}}\), such that the Hamiltonian function \(h=p_{x}{\dot{x}}+p_{y} {\dot{y}}-L\), to be
while the Hamilton’s equations read
Because the Szekeres system is autonomous, the Hamiltonian function is a conservation law which gives the energy of the system, that is, \(\frac{\mathrm{d}h}{\mathrm{d}t}=0\).
In the original variables the conservation laws become
At this point we want to present another set of variables which are useful to recognize the Hamiltonian formulation of the Szekeres system. We do the change of variables \(\rho =\exp \left( \varrho \right) , ~E=\frac{1}{6}\exp \left( \varrho \right) \left( \exp \left( -Z\right) -1\right) \), and consider the new variables \(\varrho \) and Z. Therefore, it follows \(\theta =-{\dot{\varrho }}\) and \(\sigma ={\dot{Z}}\). Hence, the following Lagrangian function is a solution of the inverse problem for the Szekeres system given by the Lagrange function
and its variation reproduces equations (1) and (2). Therefore, the four-dimensional Szekeres system is an integrable Hamiltonian system.
2.1 Hamilton–Jacobi equation
From (17) we write the time-independent Hamilton–Jacobi equation
while the conservation law \(I_{0}\) reads
By integration we have
where
Therefore, the Action reads
Consequently, the field equations are reduced to the following two-dimensional system by using the Hamilton–Jacobi equations \({\dot{x}}=\frac{\partial S}{\partial y}, ~{\dot{y}}=\frac{\partial S}{\partial x}\), that is,
We have to impose the reality condition \(y\left( 6+3I_{0}y+\Lambda y^{3}\right) > 0\), such that numerically we find the intervals for the free parameters h, \(I_0\) and y, where it is possible to have real-time and give differential equations with coefficients with zero imaginary part (i.e., in \({\mathbb {R}}\)). The detailed discussion is left to Sect. 3.
For the analysis in Sect. 3 we choose the branch \(\epsilon =-1\).
2.2 Special case: vacuum (\(\rho _D\equiv 0, E\ne 0\))
For vacuum (\(\rho _D\equiv 0\)) equation (1) is trivially satisfied and defining \(\Theta = 3 \sigma +\theta \) Eqs. (2), (3), (4) and (5) become
with algebraic constraint equation
Solving (31) for \(\Theta \), defining F such that \(\sigma = -{\dot{F}}/F\), and defining
the system (31)–(32) transforms to
The previous analysis follows by setting \((x,y)=(X,Y)\).
2.3 Special case: \((6 E+\rho _D)\equiv 0\)
In the special case \(E=-\rho _D/6\) Eqs. (1) and (2) are the same. Equations (2), (3) and (4) become
with algebraic constraint equation (5).
Solving (37) for \(\theta \), defining F such that \(\sigma = -{\dot{F}}/F\), and defining
the system (38)-(39) transforms to
Defining
we obtain
Equation (44) can be integrated as
The point-like Lagrangian which describes equations (44) and (45) is the two-dimensional Lagrangian
Hence we define the momentum \(p_{x}=\frac{\partial L}{\partial {\dot{x}}}\) and \(p_{y}=\frac{\partial L}{\partial {\dot{y}}}\), i.e. \(p_{x}={\dot{y}}\) and \(p_{y}={\dot{x}}\), such that the Hamiltonian function \(h=p_{x}{\dot{x}}+p_{y} {\dot{y}}-L\), to be
while the Hamilton’s equations read
Because the Szekeres system is autonomous, the Hamiltonian function is a conservation law, the energy of the system, that is, \(\frac{\mathrm{d}h}{\mathrm{d}t}=0\), i.e., h is a constant.
Therefore, the four-dimensional Szekeres system is an integrable Hamiltonian system. From (48) we write the time-independent Hamilton–Jacobi equation
while the conservation law \(I_{0}\) reads
Therefore, the action reads
Consequently, the field equations are reduced to the following two-dimensional system by using the Hamilton–Jacobi equations \({\dot{x}}=\frac{\partial S}{\partial y}, ~{\dot{y}}=\frac{\partial S}{\partial x}\), that is,
We choose the branch \(\epsilon =-1\) and assume \(3 I_0+\Lambda x^2>0\). That is, the physical cases are \(\Lambda>0, \; x^2 > -\frac{3 I_0}{\Lambda }\) or \(\Lambda<0, \; I_0>0, \; x^2 < -\frac{3 I_0}{\Lambda }\). In the second case, the variable x is bounded.
3 Stability analysis at the finite regime
3.1 Case \((6 E+\rho _D)\ne 0\)
The reduced two-dimensional Szekeres system in the finite regime is described by the following system of two first-order ordinary differential equations
with
where we have selected the new independent variable \(dt=\frac{\sqrt{y\left( 6+3I_{0}y+\Lambda y^{3}\right) }}{3y}d{\bar{t}}\).
The stationary points \(P=\left( x\left( P\right) , y\left( P\right) \right) \) for the dynamical system (57), (58) are given by the roots of the algebraic equations \(f\left( x,y,h,I_{0}\right) =0\) and \(g\left( x,y;h,I_{0}\right) =0\). Hence, for a nonzero cosmological constant \(\Lambda \) and nonzero value for the conservation law \(I_{0},~\)the stationary points are derived
Stationary point \(P_{0}\) is always real. However, that is not always true for points \(P_{1}\), \(P_{2}\) and \(P_{3}\). Thus for various values of the free variables \(\left\{ h, I_{0}\right\} \), the number of stationary points can be two or four. We proceed by assuming that the cosmological constant is positive, say \(\Lambda =1,\) or negative, e.g., \(\Lambda =-1\).
3.1.1 Positive \(\Lambda \)
Let us assume now that \(\Lambda =1\). Then, the stationary points read
and
Consequently, for \(I_{0}\) we find three intervals \({\mathcal {A}}=\left( -\infty ,-2 .08\right) \), \({\mathcal {B}}=\left( -2 .08,0\right) \) and \({\mathcal {C}}=\left( 0,+\infty \right) \). Thus, in the interval \({\mathcal {A}}\), points \(P_{1},~P_{2},~P_{3}\) are real, that is \(\left\{ P_{1},P_{2} ,P_{3}\right\} \in {\mathbb {R}}\). For \(I_{0}\in {\mathcal {B}}\), \(P_{2}\in {\mathbb {R}}\) while \(\left\{ P_{1},P_{3}\right\} \in {\mathbb {C}}\) with \({\Im }\left( P_{1}\right) {\Im }\left( P_{3}\right) \ne 0\), were we use the operator \({\Im }(z)\) for the imaginary part of \(z\in {\mathbb {C}}\). Finally, for \(I_{0}\in {\mathcal {C}}\) the only real point is \(P_{1}\), while \(\left\{ P_{2},P_{3}\right\} \in {\mathbb {C}}.\) So, for values of the integration constant in the interval \({\mathcal {A}}\), Eqs. (57) and (58) admit four real stationary points \(\left\{ P_{0}, P_{1}, P_{2}, P_3\right\} \) while for \(I_{0}\in {\mathcal {B}}\) or \(I_{0}\in {\mathcal {C}}\), the stationary points are two, that is, the set of points \(\left\{ P_{0} ,P_{2}\right\} \) and \(\left\{ P_{0} ,P_{1}\right\} \), respectively.
In Fig. 1 we present the imaginary and real parts for the variables \(y\left( P_{1}\right) \), \(y\left( P_{2}\right) \) and \(y\left( P_{3}\right) \). Because y should be positive, then the only physically accepted points in the finite regime are \(P_{0}\) for arbitrary \(I_{0}\) and \(P_{1}\), \(P_{3}\) for \(I_{0}<-2 .08\).

Imaginary (solid lines) and real parts (dashed lines) for the variables \(y\left( P_{1}\right) \), \(y\left( P_{2}\right) \) and \(y\left( P_{3}\right) \) are represented. We observe that points \(\left\{ P_{1},P_{2},P_{3}\right\} \in {\mathbb {R}}\) for \(I_{0}<-2 .08\). Moreover, when \(-2 .08<I_{0}<0\), only \(P_{2}\) is real, while for \(I_{0}>0\), \(P_{1}\) is a real point. By definition \(y>0\), hence, points \(P_{1}\) and \(P_{3}\) are physically accepted points for \(I_{0}<-2 .08\). Finally, for \(I_{0}>-2 .08\) no stationary points in the finite regime are physically accepted

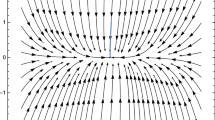
Phase-space portraits for the dynamical system (57), (58) in the \(x-y\) plane, for different values of the free parameters \(I_{0}\) and h and positive cosmological constant, \(\Lambda =1\). For \(I_{0}=-3\) we observe that the unique attractor is point \(P_{1}\) while for \(I_{0}=1\) there is not any attractor in the finite regime, and the unique stationary point is the saddle point \(P_{0}\)
To understand the stability properties of the stationary points, we linearize the system (57), (58) around \(P+\delta P\). We derive the eigenvalues of the two-dimensional matrix, namely \(e_{1}\left( P\right) \) and \(e_{2}\left( P\right) \), that we use to investigate the stability of the point.
For point \(P_{0}\) the eigenvalues are \(e_{1}\left( P_{0}\right) =-6\sqrt{3}\) and \(e_{2}\left( P_{0}\right) =3\sqrt{3}\) where we infer that the \(P_{0}\) is a saddle point. For the stationary point \(P_{1}\) the eigenvalues of the linearized system are \(e_{1}\left( P_{1}\right) =3\sqrt{3}e\left( I_{0}\right) \) and \(e_{1}\left( P_{1}\right) =6\sqrt{3}e\left( I_{0}\right) \) with \(e\left( I_{0}\right) =\left( 3+\frac{I_{0}\left( \left( \sqrt{\left( I_{0}^{3}+9\right) }-3\right) ^{\frac{2}{3}} -I_{0}\right) }{\left( \sqrt{\left( I_{0}^{3}+9\right) }-3\right) ^{\frac{1}{3}}}\right) \). Thus, for \(I_{0}<-2 .08\) we derive \({\Re }\left( e\left( I_{0}\right) \right) <0\) from where we infer that \(P_{1}\) is an attractor. We use the operator \({\Re }(z)\) for the real part of \(z\in {\mathbb {C}}\). Finally, for point \(P_{3}\) we find that the two eigenvalues have always positive real part for \(I_{0}<-2 .08,\) which means that \(P_{3}\) is always a source.
In Fig. 2 we present the phase-space portraits for the dynamical system (57), (58) in the finite regime for various values of the free variables \(I_{0}\) and h. We observe that for \(I_{0}<-2 .08\), point \(P_{1}\) is the unique attractor while for \(I_{0}>-2 .08\) there is not any attractor in the finite regime and the unique stationary point is the saddle point \(P_{0}\). The value of parameter h changes only the location of the stationary point on the \(x-\)direction and does not change the stability of the stationary points.
3.1.2 Negative \(\Lambda \)
In Fig. 3 we present the real and imaginary parts of the three stationary points \(P_{1},~P_{2}\) and \(P_{3}\) for \(\Lambda =-1.\) We have three intervals \({\mathcal {A}}_{\left( -1\right) }\mathcal {=}\left( -\infty ,0\right) \), \({\mathcal {B}}_{\left( -1\right) }\mathcal {=}\left( 0,2 .08\right) \) and \({\mathcal {C}}_{\left( -1\right) }=\left( 2 .08,+\infty \right) \) for the values of \(I_{0}\). Thus, for \(I_{0}\in {\mathcal {A}}_{\left( -1\right) }\), \(\ P_{1}\in {\mathbb {R}}\) and \(\left\{ P_{2},P_{3}\right\} \in {\mathbb {C}}\). When \(I_{0}\in {\mathcal {B}}_{\left( -1\right) }\), \(P_{2}\in {\mathbb {R}}\) and \(\left\{ P_{1}, ~P_{3}\right\} \in {\mathbb {C}}\). Finally, when \(I_{0}\in {\mathcal {C}}_{\left( -1\right) }\), \(\left\{ P_{1},P_{2},P_{3}\right\} \in {\mathbb {R}}\). However, because y is positive defined, it follows that for \(I_{0}\in {\mathcal {A}}_{\left( -1\right) }\), the stationary points are two, \(\left\{ P_{0},P_{1}\right\} \) while for \(I_{0}\in {\mathcal {B}}_{\left( -1\right) }\cup {\mathcal {C}}_{\left( -1\right) }\) there are two physical accepted stationary points, namely \(\left\{ P_{0},P_{2}\right\} \).

Imaginary (solid lines) and real parts (dashed lines) for the variables \(y\left( P_{1}\right) \), \(y\left( P_{2}\right) \) and \(y\left( P_{3}\right) \) are represented. We observe that points \(\left\{ P_{1},P_{2},P_{3}\right\} \in {\mathbb {R}}\) for \(I_{0}>-2 .08\). Moreover, when \(0<I_{0}<2 .08\), only \(P_{2}\) is real, while for \(I_{0}<0\), \(P_{1}\) is a real point. Due to \(y>0\), hence, points \(P_{1}\) and \(P_{2}\) are physically accepted points for \(I_{0}<0\) and \(I_{0}>0\), respectively
We investigate the stability properties for the stationary points, and we find that \(P_{0}\) is always a saddle point, while the stationary point \(P_{1}\) for \(I_{0}<0\), and \(P_{2},~\)for \(I_{0}>0\), have positive eigenvalues when they are physically accepted. Consequently, attractors do not exist in the finite regime for a negative cosmological constant. Phase-space portraits of Eqs. (57), (58) for the variables \(\left( x,y\right) \) and for \(\Lambda =-1\) are presented in Fig. 4, from where we observe no attractor exists in the finite regime.

Phase-space portraits for the dynamical system (57) and (58) in the \(x-y\) plane, for different values of the free parameters \(I_{0}\) and h and negative cosmological constant, \(\Lambda =-1\). For \(I_{0}=-3\) and \(I_{0}=1\) we observe that \(P_{1}\) and \(P_{2}\) points are sources, respectively, while \(P_{0}\) is a saddle point. Thus, attractors do not exist in the finite regime for negative \(\Lambda \)
We repeat the calculations for \(I_{0}=0\) and \(\Lambda =1\). We find that there is not any physically accepted stationary point except the saddle point \(P_{0}\), while for negative cosmological constant, i.e. \(\Lambda =-1\), there exist two physically accepted stationary points \(\left\{ P_{0},P_{1}\right\} \). Point \(P_{0}\) is a saddle point, while \(P_{1}\) is a source.
3.2 Stability analysis at the finite regime \((6E+\rho _{D})=0\)
The reduced two-dimensional Szekeres system in the finite regime is described by the following system of two first-order ordinary differential equations
with
where we have selected the new independent variable \(dt=\sqrt{3}\sqrt{3I_{0}+\Lambda x^{2}}d{\bar{t}}\). However, by definition in order \(\rho _{D}>0\), it follows that \(y<0\).
The stationary points \(Q=\left( x\left( Q\right) , y\left( Q\right) \right) ~\)for the dynamical system (61), (62) at the finite regime are
From hypothesis \(3 I_0+\Lambda x^2> 0\) we have the physical cases \(\Lambda>0, \; x^2 > -\frac{3 I_0}{\Lambda }\) or \(\Lambda<0, \; I_0>0, \; x^2 < -\frac{3 I_0}{\Lambda }\). In the first case \(Q_\pm \) exist for \(I_0<0\) and the allowed region is \(x^2 > -\frac{3 I_0}{\Lambda }, y<0\). In the second case, the variable x is bounded and \(Q_\pm \) always exist and the allowed region is \(x^2< -\frac{3 I_0}{\Lambda }, y<0\). Easily from the linearized system around the stationary points we derive the eigenvalues \(e_{1}\left( Q_{\pm }\right) =\pm \sqrt{-3\Lambda I_{0}}\) and \(e_{1}\left( Q_{\pm }\right) =\pm 2\sqrt{-3\Lambda I_{0}}\), which means that point \(Q_{-}\) is always a source and \(Q_+\) is a sink.
When \(I_0\ge 0, \Lambda \ge 0\) there are no stationary points at the finite region.
The choice \(I_0<0, \Lambda < 0\) give differential equations with coefficients in \({\mathbb {C}}\). Therefore, the choice of these parameters is forbidden.
4 Compactification
4.1 Poincare disk: \((6 E+\rho _D)\ne 0\)
To investigate the dynamics at the infinity regime, we define the new compactified variables \(x=\frac{\rho }{\sqrt{1-\rho ^{2}}}\cos \Phi \) and \(y=\frac{\rho }{\sqrt{1-\rho ^{2}}}\sin \Phi \), in which \(\Phi \in [0,\pi ]\) and \(\rho \in \left[ 0,1\right] .\) As x, y take infinite values we have \(\rho \rightarrow 1\). In the set of variables \(\left\{ \rho ,\Phi \right\} \) the field equations (57) and (58) read
where \(\Phi ^{\prime }=\frac{\mathrm{d}\Phi }{\mathrm{d}\tau }\), \(\mathrm{d}t=\sqrt{1-\rho ^{2}}\mathrm{d}\tau \).
For values of \(\rho \) near to one, Eqs. (65) and (66) become
From (67) we know that when \(F\left( \Phi \right) >0\), that is, \(\rho ^{\prime }\ge 0\), the trajectories will still be at infinity, while for \(F\left( \Phi \right) <0\), that is, \(\rho ^{\prime }<0\), this means that \(\rho \) decreases, that is we move far from the infinite regime. We observe that for \(\Lambda <0\), \(F\left( \Phi \right) >0\), that is, the infinity regime attracts the trajectories. It is an interesting result because as we found before for negative cosmological constant there are not attractors at the finite regime.
The stationary points of equation (68) are \(\Phi =\Phi _{0}\) such that \(G\left( \Phi _{0}\right) =0\), that is, \(\Phi _{0}^{1}=\frac{\pi }{2}\) and \(\Phi _{0}^{2}=\arctan \frac{h}{I_{0}}\) for \(I_{0}\ne 0\). Thus, by definition \(\frac{h}{I_{0}}\ge 0\). In the special case \(h=0\), it can be found a third stationary point \(\Phi _{0}^{3}=\pi \). Moreover, we calculate \(F\left( \Phi _{0}^{1}\right) =0\), while \(F\left( \Phi _{0}^{2}\right) =-\sqrt{3}\Lambda \left( 1+\left( \frac{h}{I_{0}}\right) ^{2}\right) ^{-3} \).

Qualitative evolution of potential function \(V_{G}\left( \Phi \right) \) and its derivatives \(\frac{\mathrm{d}V_{G}}{\mathrm{d}\Phi }\) and \(\frac{\mathrm{d}^{2}V_{G}}{\mathrm{d}\Phi ^{2}}\) in the interval \(\left[ 0,\pi \right] \)
We continue with the study of (68).
We define the potential function \(V_{G}\left( \Phi \right) =\int G\left( \Phi \right) \mathrm{d}\Phi \), that is,
For \(\Phi _{0}^{1}\) we derive \(V_{G}\left( \Phi _{0}^{1}\right) =-2\sqrt{3}h\), which can be easily checked that it is not a minimum of the potential. Furthermore, \(\frac{\mathrm{d}G\left( \Phi \right) }{\mathrm{d}\Phi }\) changes sign around \(\Phi _{0}^{1}\), which means that point \(\Phi _{0}^{1}\) is a saddle point. However, because \(\frac{\mathrm{d}G\left( \Phi \right) }{\mathrm{d}\Phi }|_{\Phi \rightarrow \Phi _{0}^{1}}=0\), we can easily define a stable manifold. In Fig. 5 we present the qualitative analysis for the potential \(V_{G}\) and its two derivatives for specific values of the free variables \(\left\{ I_{0},h\right\} \). We find that for \(I_{0}<0\), \(\Phi _{0}^{1}\) is minimum of the potential \(V_{G}\left( \Phi \right) \) in the interval \(\left[ 0,\frac{\pi }{2}\right] \). While, for \(I_{0}>0\), \(\Phi _{0}^{1}\) is minimum of the potential \(V_{G}\left( \Phi \right) \) in the interval \(\left[ \frac{\pi }{2},0\right] \). Thus, for \(I_{0}<0,\) \(\Phi _{0}^{1}\) is an attractor in \(\left[ 0,\frac{\pi }{2}\right] , \) i.e. \(x>0\). While, for \(I_{0}>0\), \(\Phi _{0}^{1}\) is an attractor for initial conditions in the interval \(\Phi \in \left[ \frac{\pi }{2},0\right] \), i.e. \(x<0.\)
As far as point \(\Phi _{0}^{2}\) is concerned, we observe that \(\frac{\mathrm{d}G\left( \Phi \right) }{\mathrm{d}\Phi }|_{\Phi \rightarrow \Phi _{0}^{2}}=\frac{3\sqrt{3}I_{0} }{\sqrt{1+\left( \frac{h}{I_{0}}\right) ^{2}}}\), which means that the point is physically accepted and it is an attractor in the surface with \(\rho =1\), when \(I_{0}<0,\) \(h<0\). On the other hand, for \(h=0\), it follows that \(\Phi _{0}^{2}\) is an attractor when \(I_{0}>0\), while for \(I_{0}<0\) the attractor is \(h<0\).
In Figs. 6 and 7 we present the phase-space diagrams of the field equations in the compactified variables \(\left( \rho ,\Phi \right) \) for various values of the free variables. The main results are summarized in the following proposition.
Proposition
For Szekeres system (57), (58) with a positive cosmological constant, that is, \(\Lambda =1\), the trajectories can be originated at the finite or infinite regime with attractor point at the finite regime given by \(P_{1}\) if \(I_{0}<-2 .08\). When \(I_{0}>-2 .08\), the trajectories reach the infinity regime. On the contrary, for negative cosmological constant, \(\Lambda =-1\), the trajectories may start at the finite or infinity regime and end at the infinity regime.


In order to understand better the evolution of the trajectories, in Figs. 8 and 9 we present the phase space portrait in the compactified variables \(\left( X,Y\right) \) which are defined as \(x=\frac{X}{\sqrt{1-X^{2}-Y^{2}}}\) and \(y=\frac{Y}{\sqrt{1-X^{2}-Y^{2}}}\) in which \(\left| X\right| \le 1\) and \(0\le Y\le 1\).


4.2 Poincare disk: \((6 E+\rho _D)= 0\)
The reduced two-dimensional Szekeres system in the finite regime is described by the system of two first-order ordinary differential equations (61) and (62) with \(f\left( x,y;h,I_{0}\right) \) defined by (63) and \(g\left( x,y;h,I_{0}\right) \) defined by (64) where we have selected the new independent variable \(dt=\sqrt{3}\sqrt{3I_{0}+\Lambda x^{2}}d{\bar{t}}\).
Recall,
-
(1.)
From hypothesis \(3 I_0+\Lambda x^2> 0\) we have the physical cases:
-
(a.)
\(\Lambda>0, \; x^2 > -\frac{3 I_0}{\Lambda },\; y<0\)
-
(b.)
\(\Lambda<0, \; I_0>0, \; x^2< -\frac{3 I_0}{\Lambda },\; y<0\).
-
(a.)
-
(2.)
When \(I_0\ge 0, \Lambda \ge 0\) there are no stationary points at the finite region.
-
(3.)
The choice \(I_0<0, \Lambda < 0\) give differential equations with coefficients in \({\mathbb {C}}\). Therefore, the choice of these parameters is forbidden.
4.2.1 Case a.1: \(\Lambda>0,\; I_0>0,\; y<0\)
In this case, the phase-plane is the lower half-plane
where we have attached the boundary set \(y=0\). There are not stationary points in \(H_-\). To investigate the dynamics at the infinity regime, we define the new compactified variables \(x=\frac{\rho }{\sqrt{1-\rho ^{2}}}\cos \Phi \) and \(y=\frac{\rho }{\sqrt{1-\rho ^{2}}}\sin \Phi \), in which \(\Phi \in [-\pi ,\pi ]\) and \(\rho \in \left[ 0,1\right] .\) Since the physical region is the lower half plane \(y\le 0\), we have the physical interval \(\Phi \in [-\pi ,0]\). As x, y take infinite values we have \(\rho \rightarrow 1\). In the set of variables \(\left\{ \rho ,\Phi \right\} \) the field equations (61) and (62) with \(f\left( x,y;h,I_{0}\right) \) defined by (63) and \(g\left( x,y;h,I_{0}\right) \) defined by (64) become
The leading terms as \(\rho \rightarrow 1 ^-\) are
The points at infinity satisfy \(\cos (\Phi )=0\) for \(h\ne 0\).
In terms of the Poincaré variables
we obtain
The physical region is \(X^2+Y^2\le 1, Y\le 0\).

In Fig. 10 the phase-space portraits for Szekeres system associated to (76) and (77) is presented in the compactified variables \(\left( X,Y\right) \) for positive values of the free parameters \(I_{0}\) and \(\Lambda \) and \(h=1\) corresponding to Case a.1.

In Fig. 11 the phase-space portraits for Szekeres system associated to (76) and (77) is presented in the compactified variables \(\left( X,Y\right) \) for positive values of the free parameters \(I_{0}\) and \(\Lambda \) and \(h=-1\) corresponding to Case a.1.
4.2.2 Case a.2: \(\Lambda>0,\; I_0\le 0, \; x^2 > -\frac{3 I_0}{\Lambda }, \; y<0\)
The dynamics is given also by (71)-(72) in terms of \((\rho , \Phi )\) or by (76)-(77) in terms of (X, Y). The points at infinity satisfy \(\cos (\Phi )=0\) for \(h\ne 0\), but also we have the stationary points at the finite region \(Q_{\pm }\).

In Fig. 12 the phase-space portraits for Szekeres system associated to (76) and (77) is showed in the compactified variables \(\left( X,Y\right) \) for \(I_{0}\le 0\) and \(\Lambda >0\) and \(h=1\) corresponding to Case a.2. The gray region is the forbidden region \(x^2 \le -\frac{3 I_0}{\Lambda }\).
In Fig. 13 the phase-space portraits for Szekeres system associated to (76) and (77) is showed in the compactified variables \(\left( X,Y\right) \) for \(I_{0}\le 0\) and \(\Lambda >0\) and \(h=-1\) corresponding to Case a.2. The gray region is the forbidden region \(x^2 \le -\frac{3 I_0}{\Lambda }\).

4.2.3 Case b: \(\Lambda<0, \; I_0>0, \; x^2 \le -\frac{3 I_0}{\Lambda },\; y<0\).
In this example the variable x is bounded. Since \(y<0\) we propose the bounded variable
when \(y\rightarrow -\infty \), \(Y\rightarrow 1\).
The dynamical system becomes
The stationary points at infinity are
and
with eigenvalues \(\left\{ 2 \sqrt{3} \Lambda \sqrt{-\frac{I_0}{\Lambda }},-\sqrt{3} \Lambda \sqrt{-\frac{I_0}{\Lambda }}\right\} \) and \(\left\{ -2 \sqrt{3} \Lambda \sqrt{-\frac{I_0}{\Lambda }},\sqrt{3} \Lambda \sqrt{-\frac{I_0}{\Lambda }}\right\} \), respectively. Hence, they are saddles because \(\Lambda <0\) and \(I_0>0\).
For \(\Lambda <0\), the points at the finite region are
and
The eigenvalues of \(Q_{\pm }\) are \(\left\{ \pm 2 \sqrt{3} \sqrt{-I_0 \Lambda }, \pm \sqrt{3} \sqrt{-I_0 \Lambda }\right\} \), respectively, which means that point \(Q_{-}\) is always a source and \(Q_+\) is a sink.

In Fig. 14 some phase-space portraits for the dynamical system (79)–(80) are presented.
5 Asymptotic behavior
In this section, we investigate the evolution of the kinematic and dynamical variables for the field equations (1)–(5) by using dimensionless variables. Such an approach has been widely studied in the literature and can give us important information about the physical behavior of the exact solutions at stationary points. The dynamics of the Szekeres system in the \(\theta \)-normalization, known also as Hubble normalization, were studied by [6] for the case with zero-valued cosmological constant. Recently, in [25] the case of a nonzero cosmological constant was considered. However, in the \(\theta \)-normalization, the expansion rate cannot change sign, that is, it cannot take the value \(\theta =0\). But, from the analysis in [3, 4] we know that because a family of solutions describes Kantowski–Sachs universes, the expansion rate can change sign.
Thus, in this work we define new dimensionless variables, different from that of the \(\theta \)-normalization, say,
Therefore, the field equations read
with algebraic constraint
where we have defined the new derivative \(f^{\prime }=\frac{1}{\sqrt{1+\theta ^2}}{\dot{f}}\).
Every stationary point of the dynamical system (83)-(87) with constraint (88) describes an asymptotic solution for the inhomogeneous background space (6). The physical properties of the background spaces follow from the values of the anisotropic parameter \(\Sigma \) and of the curvature scalar \(\omega _{R}\). Indeed, for a stationary point with \(\Sigma =0\) the background space is isotropic, which means that the asymptotic solution at the point will belong to the Friedmann-Lemaître-Robertson-Walker (-like) family of solutions, while for \(\Sigma \ne 0\) to the Bianchi I, Kantowski-Sachs or to the Bianchi III (-like) universes depend on the sign of the curvature scalar. Moreover, \(\eta >0\) remarks \(\theta >0\) which correspond to an expanding universe. While \(\eta <0\), i.e. \(\theta <0,\) corresponds to a shrinking universe. Finally, \(\eta =0\) describes static spacetimes with \(\theta =0\).
Additionally, we study the stability properties of the stationary points. This information is essential because we extract important information about the evolution of the solution near the stationary points, as we can also construct the evolution of the cosmological history provided by the specific model.
The stability of stationary points for the system (83)–(87) with constraint (88) for the following set of points \(P=\left( \omega _{D}, \Sigma , \alpha , \omega _{\Lambda }, \eta , \omega _{R}\right) \) is classified. We give the value of \(\omega _{R}\), for stability analysis coordinates \(\left( \omega _{D}, \Sigma , \alpha , \omega _{\Lambda }, \eta \right) \) are considered. Points \(A_{1}^{\pm }=\left( 1,0,0,0,\pm 1,0\right) \) describe singular solutions where only the pressureless matter fluid dominates. The background space is isotropic with zero valued spatial curvature, which means that it is reduced to the spatially flat Friedmann-Lemaître-Robertson-Walker background space. Points \(A_{2}^{\pm }=\left( 0,0,0,0,\pm 1,-\frac{2}{3}\right) \) provide asymptotic solutions in an isotropic background space with negative curvature. Indeed, the exact solutions at the points are the (inhomogeneous) Milne universes. The asymptotic solutions at the stationary points \(A_{3}^{\pm }=\left( 0,\pm \frac{1}{3},\frac{2}{9},0,\pm 1,0\right) \) correspond to anisotropic universes with zero valued spatial curvature, that is, they describe (inhomogeneous) Bianchi I vacuum solutions, i.e. Kasner (-like) universes. Moreover, the background space at the stationary points \(A_{4}^{\pm }=\left( 0,\mp \frac{1}{12},\frac{1}{32},0,\pm 1,-\frac{5}{8}\right) \) is anisotropic with negative valued spatial curvature, thus, the solution is that of the vacuum Kantowski-Sachs (-like) spacetime. Furthermore, inhomogeneous Kasner solutions are described also by the stationary points \(A_{5}^{\pm }=\left( 0,\pm \frac{1}{3},0,0,\pm 1,0\right) .\) The two of stationary points \(A_{6}^{\pm }=\left( 0,\pm \frac{1}{6},0,0,\pm 1,-\frac{1}{2}\right) \) describe vacuum Kantowski-Sachs spacetimes. Moreover, the two stationary points \(A_{7}^{\pm }=\left( -3,\mp \frac{1}{3},\frac{1}{6} ,\pm 1,0\right) \) are not physically accepted because they provide negative energy density for the pressureless fluid source \(\rho _{D}\).
These stationary points satisfy \(\eta ^{2}=1\) which indicates that \(\theta \) reaches infinite. Indeed the asymptotic solutions described by the stationary points \(A_{I}^{\pm },~I=1,2...7\), correspond to singular solutions in which \(\theta \propto t^{-1}\). There exist the additional stationary points with \({\eta _0}^{2}\ne 1~\)which provide an exponential expansion rate \(\theta \propto e^{H_{0}t}\). There are curves of stationary points, \(B_{1}=\left( 0,0,0,\frac{{\eta _0}^{2}}{3},{\eta _0},0\right) \), \(B_{2}=\left( 0,-\frac{{\eta _0}}{3},\frac{{\eta _0}^{2}}{3},{\eta _0}^{2},{\eta _0},2{\eta _0}^{2}\right) \) and \(B_{3}=\left( 0,\frac{2}{3}{\eta _0},0,3{\eta _0}^{2},{\eta _0}, 8{\eta _0}^{2}\right) \). The curve of stationary points \(B_{1}\) describes the asymptotic solution for a spatially flat Friedmann–Lemaître–Robertson–Walker (FLRW) (-like) spacetime dominated by the cosmological constant, that is, it describes de Sitter universe. One the other hand, the curves of stationary points \(B_{2}\) and \(B_{3}\) describe Bianchi III (-like) spacetimes.
Finally, there exist two lines of stationary points with \(\eta =0\), they are \(C_{1}=\left( \omega _{D},0,0,\frac{\omega _{D}}{6},0,\omega _{D}\right) \) and \(C_{2}=\left( -18\Sigma ^{2}, \Sigma ,\Sigma ^{2},3\Sigma ^{2},0,0\right) \). The asymptotic solution at the line of stationary points \(C_{1}\) describes an isotropic universe with positive spatially curvature, that is, it describes the closed Friedmann-Lemaître-Robertson-Walker (-like) spacetime and exists only for positive cosmological constant. Furthermore, points over line \(C_{2}\) are physically accepted only when \(\Sigma =0\), and in such case we have the physical stationary point \(C_{2}=\left( 0,0,0,0,0,0\right) \). Therefore, \(C_{2}\) describes the Minkowski solution. It is very interesting that there are two stationary points in which the expansion rate \(\theta \) changes sign, and the trajectories for the field equations can go from the region which describes an expanding universe, \(\theta >0\), to the region which the universe shrinks, i.e. \(\theta <0\). In Table 1, the above discussion is summarized. Additionally, the eigenvalues around the stationary points for the linearized system (83)–(87) are presented. From the eigenvalues, we infer that points \(A_{1}^{\pm } \), \(A_{2}^{\pm }\), \(A_{4}^{\pm }\), \(B_{2}\), \(B_{3}\,\ \) and \(C_{1}\) are always saddle points. Meanwhile, Points \(A_{3}^{+}\), \(A_{5}^{+}\) are sources describing unstable solutions, while \(A_{3}^{-}\) and \(A_{5}^{-}\) are attractors. The line of stationary points \(B_{1}\) has five negative eigenvalues and a zero eigenvalue. Thus, it has a 4D stable manifold and a 1D center manifold, which can be determined by applying the center manifold theorem (CMT). As far as the line of stationary points \(C_{2}\) is concerned the five eigenvalues are all zero. However, from the phase-space diagrams presented below it follows that the point \(C_{2}\) always describes the unstable Minkowski universe.




In Figs. 15, 16, 17 and 18 we present phase-space portraits for the field equations (83)–(87) in the two-dimensional planes \(\left( \omega _{D},\Sigma \right) \,\), \(\left( \omega _{D},\alpha \right) \), \(~\left( \omega _{D},\omega _{\Lambda }\right) \), \(\left( \Sigma ,\alpha \right) \) for \(\eta =1\) (Fig. 15), \(\eta =-1\) (Fig. 16) and \(\eta =0\) (Fig. 17). In Fig. 18 the phase-space portraits are in the two-dimensional planes \(\left( \eta ,\Sigma \right) , \left( \eta ,\alpha \right) \), \(\left( \eta ,\omega _{\Lambda }\right) \) and \(\left( \eta ,\omega _{D}\right) .\)
The set of stationary points \(B_1\) can be parametrized as the curve \(s(\eta )= \left( 0,0,0,\frac{{\eta }^{2}}{3},{\eta },0\right) \). Fixing a point of \(B_{1}\) with \(\eta =\eta _0\) the eigensystem at the stationary point fixed is given by \(\left\{ \begin{array}{ccccc} 0 &{} -\eta _0 &{} -\eta _0 &{} -\frac{2 \eta _0 }{3} &{} -\frac{2 \eta _0 }{3} \\ \left( 0,0,0,\frac{2 \eta _0 }{3},1\right) &{} \left( -\frac{2 \eta _0 }{\eta _0 ^2-1},0,0,\frac{2 \eta _0 ^3}{3 \left( \eta _0 ^2-1\right) },1\right) &{} \left( 0,\frac{3}{\eta _0 },1,0,0\right) &{} \left( 0,0,0,\frac{2 \eta _0 ^3}{3 \left( \eta _0 ^2-1\right) },1\right) &{} (0,1,0,0,0) \\ \end{array} \right\} .\) Since the eivenvector associated to the zero eigenvalue, \( \left( 0,0,0,\frac{2 \eta _0 }{3},1\right) \) is parallel to the tangent vector \(v= \frac{\mathrm{d}s(\eta )}{\mathrm{d}\eta }|_{\eta =\eta _0}= \left( 0,0,0,\frac{2 \eta _0 }{3},1\right) \) at the given point with coordinates \(\left( 0,0,0,\frac{{\eta _0}^{2}}{3},{\eta _0},0\right) \) in the curve \(B_1\). Then, the line of stationary points \(B_{1}\) is normally hyperbolic. A set of non-isolated stationary points is said to be normally hyperbolic if the only eigenvalues with zero real parts are those whose corresponding eigenvectors are tangent to the set. Since by definition any point on a set of non-isolated stationary points will have at least one eigenvalue which is zero, all points in the set are non-hyperbolic. However, a set that is normally hyperbolic can be completely classified as per its stability by considering the signs of eigenvalues in the remaining directions (i.e., for a curve, in the remaining \(n-1\) directions) (see [40], pp. 36). When these arguments are applied to \(B_1\), it follows that the line of stationary points is stable.
Another way to see this is using the Center Manifold Theorem. The center manifold of a dynamical system \(\dot{\mathbf{x }}=\mathbf{f} (\mathbf{x })\) is based upon an equilibrium point of that system. A center manifold of the equilibrium then consists of those nearby orbits that neither decay exponentially quickly, nor grow exponentially quickly. The first step when studying equilibrium points of dynamical systems is to linearize the system, and then compute its eigenvalues and eigenvectors. The eigenvectors corresponding to eigenvalues with negative real parts form a basis for the stable eigenspace. The eigenvectors corresponding to eigenvalues with positive real parts form the unstable eigenspace. However, if the equilibrium has eigenvalues whose real part is zero, then the corresponding eigenvectors form the center eigenspace. Going beyond the linearization, when we account for nonlinear perturbations in the dynamical system, the center eigenspace deforms to the nearby center manifold. If the eigenvalues are precisely zero, rather than just real-part being zero, then the corresponding eigenspace more specifically gives rise to a slow manifold. The behavior on the center (slow) manifold is generally not determined by the linearization and thus may be difficult to construct.
The center manifold existence theorem states that if the right-hand side function \(\mathbf{f }(\mathbf{x })\) is \(C^{r}\) (r times continuously differentiable), then at every equilibrium point there exists a neighborhood of some finite size in which there is at least one of a unique \(C^{r}\) stable manifold, a unique \(C^{r}\) unstable manifold, and a (not necessarily unique) \(C^{{r-1}}\) center manifold [41, Theorem 3.2.1]. In the case when the unstable manifold does not exist, center manifolds are often relevant to modeling. The center manifold emergence theorem then says that the neighborhood may be chosen so that all solutions of the system staying in the neighborhood tend exponentially quickly to some solution \(\mathbf{y} (t)\) on the center manifold. That is, \(\mathbf{x} (t)= \mathbf{y} (t)+ {\mathcal {O}}(e^{-\beta t})\) as \(t\rightarrow \infty \) for some rate \(\beta \) [42]. This theorem asserts that for a wide variety of initial conditions the solutions of the full system decay exponentially quickly to a solution on the relatively low-dimensional center manifold.
A third theorem, the approximation theorem, asserts that if an approximate expression for such invariant manifolds, say \(\mathbf{x} =\mathbf{X} (\mathbf{s })\) satisfies the differential equation for the system up to an error of the order \({\mathcal {O}}(|\mathbf{s }|^{p})\) as \(\mathbf{s }\rightarrow \mathbf{0 }\), then the invariant manifold is approximated by \(\mathbf{x} =\mathbf{X} (\mathbf{s} )\) to an error of the same order, namely \({\mathcal {O}}(|\mathbf{s }|^{p})\).
Defining the similarity matrix
and the linear transformation
such that
This transformation translates the point with coordinates \(\left( 0,0,0,\frac{{\eta _0}^{2}}{3},{\eta _0},0\right) \) at the curve \(B_1\) to the origin. The new system can be symbolically written as
or
where the vector \({\mathbf {g}}({\mathbf {X}})\) contains the nonlinear terms. Hence, the local center manifold of the origin is given locally by the graph
for \(\delta \) small enough. From the invariance of the center manifold of the origin for the flow of the dynamical systems it follows that \(h_i\) satisfy the set of differential equations
Substituting the ansatz
in eqs. (95) and comparing coefficients of the same powers in \(x_1\) we obtain \(a_{22}= 0,a_{23}= 0,a_{24}= 0,a_{25}= 0,a_{26}= 0,a_{27}= 0,a_{28}= 0,a_{29}= 0,a_{32}= 0,a_{33}= 0,a_{34}= 0,a_{35}= 0,a_{36}= 0,a_{37}= 0,a_{38}= 0,a_{39}= 0,a_{42}= \frac{\eta _0^2-1}{2 \eta _0},a_{43}= \frac{\left( \eta _0^2-1\right) ^2}{2 \eta _0^2},a_{44}= \frac{5 \left( \eta _0^2-1\right) ^3}{8 \eta _0^3},a_{45}= \frac{7 \left( \eta _0^2-1\right) ^4}{8 \eta _{0}^4},a_{46}= \frac{21 \left( \eta _0^2-1\right) ^5}{16 \eta _0^5},a_{47}= \frac{33 \left( \eta _0^2-1\right) ^6}{16 \eta _0^6},a_{48}= \frac{429 \left( \eta _0^2-1\right) ^7}{128 \eta _0^7},a_{49}= \frac{715 \left( \eta _0^2-1\right) ^8}{128 \eta _0^8},a_{52}= 0,a_{53}= 0,a_{54}= 0,a_{55}= 0,a_{56}= 0,a_{57}= 0,a_{58}= 0,a_{59}= 0\) for \(N=10\). This is our induction start. Assuming \(a_{2 k}= a_{3 k}= a_{5 k}=0, \forall k, 2 \le k\le N-1, N\ge 10\) and equating to zero the coefficients of all orders of \(x_i^k\) up to order \(N+1\), we obtain \(a_{2 N}= a_{3 N}= a_{5 N}=0\). That is, assuming \(h_i(x_1) = a_{i N} x_1^N + {\mathcal {O}}(x_1^{N+1}), i=2,3,5\), we obtain from (95a), (95b) and (95d) (and by neglecting the terms \({\mathcal {O}}(x_1^{N+1})\)) that
where
\(P(x_1, h_4)= \eta _0^2 \left( \eta _0^2-1\right) N h_4^4+\eta _0 h_4^2 \left( \left( \eta _0^2-3\right) x_1 \left( 3 \left( \eta _0^2-1\right) N+2\right) -2 \eta _0 \left( \eta _0^2-1\right) N\right) +h_4^3 \left( \eta _0 \left( \eta _0^4-4 \eta _0^2+1\right) N+2 \left( \eta _0^2-1\right) x_1 \left( \left( 2 \eta _0^2-1\right) N+1\right) \right) +x_1 h_4 \left( -2 \eta _0^4 N+ \eta _{0}^2 (6 N-7)+3\right) -3 \eta _0 \left( \eta _0^2-1\right) x_1\),
\(Q(x_1, h_4)= \left( -3 \left( \eta _0^2-1\right) x_1 h_4^3-3 \eta _0 \left( \eta _0^2-3\right) x_1 h_4^2+\left( 9 \eta _0^2-3\right) x_1 h_4\right) \),
\(R(x_1, h_4)= \eta _0^2 h_4^2 \left( \left( \eta _0^2-3\right) x_1 \left( 3 \left( \eta _0^2-1\right) N+1\right) -2 \eta _0 \left( \eta _0^2-1\right) N\right) +\eta _0 h_4^3 \left( \eta _0 \left( \eta _0^4-4 \eta _{0}^2+1\right) N+\left( \eta _0^2-1\right) x_1 \left( \left( 4 \eta _0^2-2\right) N+1\right) \right) +\eta _0^3 \left( \eta _0^2-1\right) N h_4^4+h_4 \left( 2 \eta _0 x_1-2 \eta _0^3 x_1 \left( \left( \eta _0^2-3\right) N+2\right) \right) -2 \eta _0^2 \left( \eta _0^2-1\right) x_1\).
On the other hand, the function
satisfies \(h_4(0)=h_4'(0)\) and its series expansions around \(x_1=0\) has exactly the first eight coefficients \(a_{42}, \ldots a_{4 9}\) deduced at the inducting start. Substituting (99) in (97) and (98) we obtain \(P(x_1, h_4(x_1))\ne 0, Q(x_1, h_4(x_1))\ne 0\) and \(R(x_1, h_4(x_1))\ne 0\) for \(x_1\ne 0\) and \(0<\eta _0<1\), which implies \(a_{2 N}= a_{3 N}= a_{5 N}=0\). Using induction over N we obtain the exact solution
That is, the local center manifold of the origin is
and \(x_1^{\prime }=0\) at the center manifold. In the original variables the center manifold is

In our approximation we have
Using these results we obtain that the center manifold is contained in the plane \((\omega _{\Lambda }, \eta )\) whose dynamics is given by
with constraint
Then, the dynamics of the center manifold of \(B_1\) can be inferred from the dynamics of the system (105)–(106). The stability of the center manifold is illustrated in Fig. 19 where a phase portrait of the dynamical system (105)–(106) in the two-dimensional plane \((\omega _\Lambda , \eta )\) is displayed. Then, the stability of the de Sitter line of points \(B_1: \eta ^2-3 \omega _\Lambda =0\) it is shown. That is, we show that the attractor at the finite regime in \({\mathbb {R}}^5\) is related with the de Sitter universe for a positive cosmological constant and positive \(\eta \) (positive H).
6 Conclusions
In this study, we investigated the global dynamics for the Szekeres system with a nonzero cosmological constant term. The Szekeres system has consisted of an algebraic equation and four first-order ordinary differential equations defined in the \({\mathbb {R}}^{4}\). The system of ordinary differential equations is autonomous and admits a point-like Lagrangian. Consequently, a Hamiltonian function exists and a sufficient number of conservation laws from where infer the integrability properties of the Szekeres system. By applying the Hamilton–Jacobi theory, we can reduce the Szekeres system into a system of two first-order ordinary differential equations.
Hence in the \({\mathbb {R}}^{2}\) space, we investigate the global dynamics for the evolution of the Szekeres system in the finite and infinity regime. We find that various values of the conservation laws, that is, of the free variables the evolution of the Szekeres system differs. Moreover, we investigate the dynamics on specific surfaces of special interests.
Finally, for completeness of our analysis, we study the evolution of the physical variables of the Szekeres system with the nonzero cosmological constant term, by using dimensionless variables different from that of the Hubble-normalization. In the new variables the stationary points of the Szekeres system determined while the stability properties are provided.
In the presence of the cosmological constant, the evolution of the Szekeres system is different from that which was studied before when \(\Lambda =0\). We see that for \(\Lambda >0\), there can exist an attractor in the finite regime which describes the de Sitter universe. Furthermore, we investigated the origin of the trajectories, in the finite and infinite regimes, while we show that the dynamics depend on the value of the conservation laws. Indeed, we classified the different dynamical evolution according to the specific value for the conservation law. That is, we have examined two types of Hamiltonian systems admitting extra quadratic conservation laws:
-
1.
Case 1:
$$\begin{aligned} (6 E + \rho _D)\ne 0: \left\{ \begin{array}{ll} &{} {\dot{x}}= p_y, \\ &{} {\dot{y}}=p_x, \\ &{} \dot{p_x}= \frac{\Lambda }{3} y -\frac{1}{y^2}, \\ &{} \dot{p_y}= \frac{\Lambda }{3} x -\frac{2 x}{y}, \\ &{} {\mathcal {C}}_1:= h= p_x p_y -\frac{\Lambda }{3} x y +\frac{x}{y^2}, \\ &{} {\mathcal {C}}_2:= I_0 = p_x^2 -\frac{\Lambda }{3} y^2 -\frac{2}{y}. \end{array}\right. \end{aligned}$$(108) -
2.
Case 2:
$$\begin{aligned} (6 E + \rho _D)= 0: \left\{ \begin{array}{ll} &{} {\dot{x}}= p_y, \\ &{} {\dot{y}}=p_x, \\ &{} \dot{p_x}= \frac{\Lambda }{3} y +\frac{1}{4 x^2}, \\ &{} \dot{p_y}= \frac{\Lambda }{3} x, \\ &{} {\mathcal {C}}_1:= h= p_x p_y -\frac{\Lambda }{3} x y +\frac{1}{4 x}, \\ &{} {\mathcal {C}}_2:= I_0 = p_y^2 -\frac{\Lambda }{3} x^2. \end{array}\right. \end{aligned}$$(109)
In both cases, the conservation laws \({\mathcal {C}}_1\) and \({\mathcal {C}}_2\) are used to eliminate the momenta \(p_x\) and \(p_y\) obtaining two-dimensional phase spaces (up to time rescalings) given by (i) (28)-(29) (by choosing one branch we have the system (57)-(58) with \(f\left( x,y;h,I_{0}\right) \) given by (59) and \(g\left( x,y;h,I_{0}\right) \) given by (60)), and (ii) (61)-(62) with \(f\left( x,y;h,I_{0}\right) \) defined by (63) and \(g\left( x,y;h,I_{0}\right) \) defined by (64), respectively. Then, according to the signs of \(I_0\) and h, are obtained all the equilibrium points (equilibrium lines) of the reduced systems.
Model (108), for \(\Lambda \) positive, say, \(\Lambda =1\), we presented the phase-space portraits for the dynamical system (57), (58) in the finite regime for various values of the free variables \(I_{0}\) and h. We observe that for \(I_{0}<-2 .08\), point \(P_{1}\) is the unique attractor while for \(I_{0}>-2 .08\) there is not any attractor in the finite regime and the unique stationary point is the saddle point \(P_{0}\). The value of parameter h changes only the location of the stationary point on the \(x-\)direction and does not change the stability of the stationary points. For negative cosmological constant, say \(\Lambda =-1\), we investigated the stability properties for the stationary points, and we find that \(P_{0}\) is always a saddle point, while the stationary point \(P_{1}\) for \(I_{0}<0\), and \(P_{2},~\)for \(I_{0}>0\), have positive eigenvalues when they are physically accepted. Consequently, attractors do not exist in the finite regime for a negative cosmological constant.
Related work is [43] where the Szekeres system with the cosmological constant term, that describes the evolution of the kinematic quantities were studied for the Einstein field equations in dimension four. There, the authors consider our model (108), but only taking into account the Hamiltonian constraint \({\mathcal {C}}_1\). That is, the dynamics of the Hamiltonian system are restricted on each one of the levels surfaces \(H = h\) with \(h \in {\mathbb {R}}\). Using the Poincaré compactification on \({\mathbb {R}}^3\) the global dynamics of the Szekeres system were analyzed. In [43] a new proof of the finite attractor was provided (which complements our result about the existence of an attractor in the finite regime). Additionally, the model also exhibits a repulsor in the finite regime. More precisely, the x-axis for \(x\ne 0\) has a two-dimensional stable and a 2-dimensional unstable manifolds. While the curve \(C_h= \left\{ (x,y, p_y)\in {\mathbb {R}}^3: p_y=0, x=-\frac{3 h y^2}{y^3 \Lambda -3}\right\} \) when \(h y(y^3 \Lambda -3) \ne 0\) has a three-dimensional stable manifold in the arc of the curve whose points satisfy \(\frac{3hy^2(6 + y^3\Lambda )}{ y^3 \Lambda - 3} > 0\) (i.e. this arc is an attractor), and a three-dimensional unstable manifold in the arc of the curve whose points satisfy \(\frac{3hy^2(6 + y^3\Lambda )}{ y^3 \Lambda - 3} < 0\). Additionally, in [43] was proved that at infinity there is an attractor and a repulsor. That is, in the Poincaré ball the circles \(z_2=\pm \sqrt{\Lambda /3}\), \(z_3 = 0\) have a three-dimensional stable manifold if \(z_1 > 0\) (i.e. these circles are attractors), or a three-dimensional unstable manifold \(z_1 < 0\) (i.e. these circles are repulsors).
Finally, for model (109), which leads to the dynamical system (61), (62), the stationary points at the finite regime are \( Q_{\pm }=(x,y)=\left( \pm \sqrt{-\frac{3I_{0}}{\Lambda }},-\frac{3h}{\Lambda }\pm \frac{1}{4}\sqrt{-\frac{3}{I_{0}\Lambda }}\right) \). From hypothesis \(3 I_0+\Lambda x^2> 0\) we have the physical cases \(\Lambda>0, \; x^2 > -\frac{3 I_0}{\Lambda }\) or \(\Lambda<0, \; I_0>0, \; x^2 < -\frac{3 I_0}{\Lambda }\). In the first case \(Q_\pm \) exist for \(I_0<0\) and the allowed region is \(x^2 > -\frac{3 I_0}{\Lambda }, y<0\). In the second case, the variable x is bounded and \(Q_\pm \) always exist and the allowed region is \(x^2< -\frac{3 I_0}{\Lambda }, y<0\). Easily from the linearized system around the stationary points we derive the eigenvalues \(e_{1}\left( Q_{\pm }\right) =\pm \sqrt{-3\Lambda I_{0}}\) and \(e_{1}\left( Q_{\pm }\right) =\pm 2\sqrt{-3\Lambda I_{0}}\), which means that point \(Q_{-}\) is always a source and \(Q_+\) is a sink. When \(I_0\ge 0, \Lambda \ge 0\) there are no stationary points at the finite region. The choice \(I_0<0, \Lambda < 0\) give differential equations with coefficients in \({\mathbb {C}}\). Therefore, the choice of these parameters is forbidden.
In all the cases, we provided the analysis both at finite and at infinite phase space regions by using compact variables.
References
A. Krasiński, Inhomogeneous Cosmological Models (Cambridge University Press, Cambridge, 1997)
R. Maartens, W. Lesame, G.F.R. Ellis, Consistency of dust solutions with div H = 0. Phys. Rev. D 55, 5219 (1997). https://doi.org/10.1103/PhysRevD.55.5219
P. Szekeres, A class of inhomogeneous cosmological models. Commun. Math. Phys. 41, 55 (1975). https://doi.org/10.1007/BF01608547
J.D. Barrow, J. Stein-Schabes, Inhomogeneous cosmologies with cosmological constant. Phys. Lett. A 103, 315 (1984). https://doi.org/10.1016/0375-9601(84)90467-5
G.M. Covarrubias, A class of Szekeres space-times with cosmological constant. Astroph. Sp. Sci. 103, 401 (1984). https://doi.org/10.1007/BF00653757
M. Bruni, S. Matarrese, P. Ornella, Dynamics of silent universes. Astroph. J. 445, 958 (1995). https://doi.org/10.1086/175755
D.A. Szafron, Inhomogeneous cosmologies: new exact solutions and their evolution. J. Math. Phys. 18, 1673 (1977). https://doi.org/10.1063/1.523468
S.W. Goode, J. Wainwright, Characterization of locally rotationally symmetric space-times. Gen. Relativ. Gravit. 18, 315 (1986). https://doi.org/10.1007/BF00765890
J.A.S. Lima, J. Tiommo, Inhomogeneous two-fluid cosmologies. Gen. Relat. Gravit. 20, 1019 (1988). https://doi.org/10.1007/BF00759023
K. Bolejko, M.-N. Célérier, A. Krasiński, Inhomogeneous cosmological models: exact solutions and their applications. Class. Quantum Grav. 28, 164002 (2011). https://doi.org/10.1088/0264-9381/28/16/164002
C. Saulder, S. Mieske, E. van Kampen, W.W. Zeilinger, Hubble flow variations as a test for inhomogeneous cosmology. A&A 622, A83 (2019). https://doi.org/10.1051/0004-6361/201629174
C. Clarkson, M. Regis, The cosmic microwave background in an inhomogeneous universe. JCAP 02, 013 (2011). https://doi.org/10.1088/1475-7516/2011/02/013
K. Bolejko, The Szekeres Swiss Cheese model and the CMB observations. Gen. Rel. Gravit. 41, 1737 (2009). https://doi.org/10.1007/s10714-008-0746-x
K. Bolejko, M. Korzyński, Inhomogeneous cosmology and backreaction: Current status and future prospects. IJMPD 26, 1730011 (2017). https://doi.org/10.1142/S0218271817300117
K. Bolejko, M.-N. Célérier, Szekeres Swiss-cheese model and supernova observations. Phys. Rev. D 82, 103510 (2010). https://doi.org/10.1103/PhysRevD.82.103510
M. Ishak, A. Peel, Growth of structure in the Szekeres class-II inhomogeneous cosmological models and the matter-dominated era. Phys. Rev. D 85, 083502 (2012). https://doi.org/10.1103/PhysRevD.85.083502
D. Vrba, O. Svitek, Modelling inhomogeneity in Szekeres spacetime. Gen. Relativ. Grav. 46, 1808 (2014). https://doi.org/10.1007/s10714-014-1808-x
A. Gierzkiewicz, Z.A. Golda, On integrability of the Szekeres system, I. J. Nonlinear Math. Phys. 23, 494 (2016). https://doi.org/10.1080/14029251.2016.1237199
A. Gierzkiewicz, Z.A. Golda, A complete set of integrals and solutions to the Szekeres system. Phys. Lett. A 382, 2085 (2018). https://doi.org/10.1016/j.physleta.2018.05.038
A. Paliathanasis, P.G.L. Leach, Symmetries and Singularities of the Szekeres System. Phys. Lett. A 381, 1277 (2017). https://doi.org/10.1016/j.physleta.2017.02.009
A. Ramani, B. Dorizzi, B. Grammaticos, T. Bountis, Integrability and the Painlevé property for low-dimensional systems. J. Math. Phys. 25, 878 (1984). https://doi.org/10.1063/1.526240
A. Paliathanasis, A. Zampeli, T. Christodoulakis, M.T. Mustafa, Quantization of the Szekeres system. Class. Quantum Grav. 35, 125005 (2018). https://doi.org/10.1088/1361-6382/aac227
P.G.L. Leach, Lie symmetries and Noether symmetries. Applic. Anal. Discrete Math. 6, 238–246 (2012)
A. Paliathanasis, Quantum potentiality in inhomogeneous cosmology. Universe 7, 52 (2021). https://doi.org/10.3390/universe7030052
A. Zampeli, A. Paliathanasis, Quantization of inhomogeneous spacetimes with cosmological constant term. Class. Quantum Grav. 38, 165012 (2021). https://doi.org/10.1088/1361-6382/ac1209
J. Libre, C. Valls, On the dynamics of the Szekeres system. Phys. Lett. A 383, 301 (2019). https://doi.org/10.1016/j.physleta.2018.10.050
J. Libre, C. Valls, Dynamics of the Szekeres system. J. Math. Phys. 62, 082502 (2021). https://doi.org/10.1063/5.0054051
E.J. Copeland, A.R. Liddle, D. Wands, Exponential potentials and cosmological scaling solutions. Phys. Rev. D 57, 4686 (1998). https://doi.org/10.1103/PhysRevD.57.4686
A.A. Coley, R.J. van den Hoogen, The dynamics of multiscalar field cosmological models and assisted inflation. Phys. Rev. D (2000). https://doi.org/10.1103/PhysRevD.62.023517
A.P. Billyard, A.A. Coley, J.E. Lidsey, U.S. Nilsson, Dynamics of M theory cosmology. Phys. Rev. D 61, 043504 (2000). https://doi.org/10.1103/PhysRevD.61.043504
A.A. Coley, Dynamical systems and cosmology. Astroph. Space Sci. Libr. (2003). https://doi.org/10.1007/978-94-017-0327-7
G. Leon, E.N. Saridakis, Dynamical analysis of generalized Galileon cosmology. JCAP 03, 025 (2013). https://doi.org/10.1088/1475-7516/2013/03/025
G.A. Rave-Franco, C. Escamilla-Rivera, J.L. Said, Dynamical complexity of the teleparallel gravity cosmology. Phys. Rev. D 103, 084017 (2021). https://doi.org/10.1103/PhysRevD.103.084017
R.G. Landim, Cosmological perturbations and dynamical analysis for interacting quintessence. EPJC 79, 889 (2019). https://doi.org/10.1140/epjc/s10052-019-7418-8
M. Karčiauskas, Dynamical Analysis of Anisotropic Inflation. Mod. Phys. Lett. A 31, 1640002 (2016). https://doi.org/10.1142/S0217732316400022
G. Leon, E.N. Saridakis, Dynamical behavior in mimetic F(R) gravity. JCAP 04, 031 (2015). https://doi.org/10.1088/1475-7516/2015/04/031
A. Suroso, F.P. Zen, Cosmological model with nonminimal derivative coupling of scalar fields in five dimensions. Gen. Rel. Gravit. 45, 799 (2013). https://doi.org/10.1007/s10714-013-1500-6
A. Paliathanasis, G. Leon, Asymptotic behavior of N-fields Chiral Cosmology. EPJC 80, 847 (2020). https://doi.org/10.1140/epjc/s10052-020-8423-7
A. Giacomini, S. Jamal, G. Leon, A. Paliathanasis, J. Saavedra, Phys. Rev. D 95, 124060 (2017). https://doi.org/10.1103/PhysRevD.95.064031
B. Aulbach, Continuous and Discrete Dynamics near Manifolds of Equilibria. Lecture Notes in Mathematics No. 1058, Springer (1984)
Guckenheimer, J., Holmes, P.: Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields, Applied Mathematical Sciences, vol. 42 (Springer, Berlin, New York, 1997). 978-0-387-90819-9, corrected fifth printing
G. Iooss, M. Adelmeyer, Topics in Bifurcation Theory. p. 7 (1992)
J. Llibre, C. Valls, Phys. Dark Univ. 35, 100954 (2022). https://doi.org/10.1016/j.dark.2022.100954
Acknowledgements
This research was funded by Agencia Nacional de Investigación y Desarrollo—ANID through the program FONDECYT Iniciación grant no. 11180126 and by Vicerrectoría de Investigación y Desarrollo Tecnológico at Universidad Católica del Norte. Ellen de Los Milagros Fernández Flores is acknowledged for proofreading this manuscript and for improving the English.
Author information
Authors and Affiliations
Corresponding author
Appendix A: Szekeres system with \(\Lambda =0\)
Appendix A: Szekeres system with \(\Lambda =0\)

Phase-space portraits for Szekeres associated to system (A1), (A2) for different values of the free parameters \(I_{0}\) and h and zero value for the cosmological constant, i.e. \(\Lambda =0\). Figures of the first row are in the local variables \(\left( x,y\right) \), while figures of the second row are for the compactified variables \(\left( X,Y\right) \)
In this “Appendix” we discuss about the global dynamics for Szekeres system with \(\Lambda =0\). Such analysis has been published before for other set of variables in [26]. However, for the completeness of our analysis we summarize the main results in the following lines. The dynamical system (57), (58) for \(\Lambda =0\) reads
The latter dynamical system in the finite regime admits the stationary points \(P_{0}^{\left( \Lambda =0\right) }=\left( 0,0\right) \) and \(P_{1}^{\left( \Lambda =0\right) }=\left( \frac{4h}{I_{0}^{2}},-\frac{2}{I_{0}}\right) \) which exist for \(I_{0}\ne 0\) and it is physically accepted when \(I_{0}<0,\) because \(y\ge 0.\) The eigenvalues of the linearized system around point \(P_{0}^{\left( \Lambda =0\right) }\) are \(-6\sqrt{3}\) and \(3\sqrt{3}\), which means that the point is saddle. Similarly, for point \(P_{1}^{\left( \Lambda =0\right) }\) we derive the eigenvalues \(6\sqrt{3}\) and \(3\sqrt{3}\) which means that \(P_{1}^{\left( \Lambda =0\right) }\) is a source. Thus, do not exists stationary point at the finite regime. As far as the analysis at infinity is concerned, we can easily conclude from the results of Sect. 4 that results for \(\Lambda <0\) and \(I_{0}<0\) apply also when \(\Lambda =0\) and \(I_{0}<0\). Therefore, the trajectories can end at infinity, while they are originated at infinity or the source point \(P_{1}^{\left( \Lambda =0\right) }\).
In Fig. 20 phase-space portraits for the Szekeres system with zero cosmological constant terms for different values of the free variables are presented. We observe that the trajectories of the dynamical systems end at infinity.
Rights and permissions
About this article

Cite this article
Paliathanasis, A., Leon, G. Global dynamics and evolution for the Szekeres system with nonzero cosmological constant term. Eur. Phys. J. Plus 137, 366 (2022). https://doi.org/10.1140/epjp/s13360-022-02542-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1140/epjp/s13360-022-02542-9