
Abstract
In this paper, the Fisher’s equation is studied with three different forms of nonlinear diffusion. When studying population problems, various forms of nonlinear diffusion can capture the effects of crowding or aggregation processes. Exact solutions for such nonlinear problems can be extremely useful to practitioners in the field. The Riccati–Bernoulli sub-ODE method is employed to obtain the exact traveling wave solutions for our nonlinear diffusion equation. The solutions that we find are new and to our knowledge, have not been reported in the literature.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The Fisher’s equation, also known as the Fisher–Kolmogorov–Petrovsky–Piscounov (Fisher-KPP) equation, in its simplest form is given by [12, 20]
where t is time, x is the spatial coordinate, and u(x, t) is the population density. This equation was first studied by Fisher [12] to investigate the wave propagation of a mutant gene in a population. In this case, u(x, t) is the frequency of the mutant gene at a given spatial coordinate x and time t. Thereafter, Eq. (1) has been widely used in areas such as ecology (modeling population growth of species with u(x, t) being the population density) [21], chemistry (understanding chemical kinetics with u(x, t) as the concentration of the chemical) [27], and heat and mass transfer (studying the temperature and material dispersion with u(x, t) representing either the temperature or the concentration of a material) [9]. In mathematics, the Fisher’s equation is a model equation that describes the interaction between reaction and diffusion processes. Recently, it was argued in [25] that when studying population models, maybe, one has to take into account the eco-evolutionary feedback on population mobility. As such, one may have to consider diffusion as a population density-dependent process. If we take the diffusion to be density-dependent, then Eq. (1) can be written as,
Equation (2) with the diffusivity function \(D(u)=\lambda _{0}+\lambda _{1}u\) becomes the nonlinear reaction–diffusion equation
and this has been considered by Cherniha and Dutka in [5], where \(\lambda _{0}\) and \(\lambda _{1}\) are real numbers. Murray [22], Aronson [3], Newman [24], and Harris [14] have studied (3) with \(\lambda _{0}=0\). It is well known that nonlinear diffusion plays an important role in material or species dispersion [22, 23]. From the biological point of view, the model given by Eq. (3) implies that the population disperses to regions of lower density more rapidly as the population gets more crowded.
Equation (2) with the nonlinear diffusivity function
becomes the nonlinear reaction–diffusion equation
and this has been considered by Hayes in [15] and [16], where \(0<\omega<1,0<u_0<1, \hbox {\,and\,} 0<\Delta u\ll 1\). She was motivated to take D(u) in this form because of her interest in traveling wave solutions of a model of non-Fickian polymer-penetrant systems developed by Cohen, Cox, and White [6,7,8]. Here, the diffusivity was chosen in the form of Eq. (4) in order to describe the stress driven diffusion in polymers.
In the past, the exact solutions for nonlinear evolution equations have been investigated by many authors who were interested in nonlinear phenomena. Many effective and powerful methods have been presented such as Hirota’s bilinear method [18], inverse scattering transform [1], homogeneous balance method [10, 28], auxiliary equation method [26], modified Kudryashov method [4], hyperbolic function method [19], Exp-function method [17], (\(\frac{G^\prime }{G}\))-expansion method [11], and many more. Recently, Yang et al. [29] proposed the Riccati–Bernoulli sub-ODE method by introducing a subsidiary ordinary differential equation of the form
where \(\alpha ,\beta ,\gamma ,\) and m are real constants. The main idea of the Riccati–Bernoulli sub-ODE method is that it may be possible to obtain a traveling wave solution of a nonlinear partial differential equation as a polynomial expression where the variable is the solution of a simple and solvable ordinary differential equation that is the Riccati–Bernoulli sub-ODE. The degree of this sub-ODE is determined by considering the homogeneous balance between the highest derivatives and the nonlinear terms in the equation.
We employ this method to find exact traveling wave solutions for the nonlinear diffusion equation given by (2). In Sect. 2, we give a brief description of the Riccati–Bernoulli sub-ODE method. In Sect. 3, we apply the method to solve three different forms of the diffusivity function D(u) in Eq. (2). Section 4 presents the conclusions.
2 Description of the Riccati–Bernoulli sub-ODE method
Here, we outline the main steps of the Riccati–Bernoulli sub-ODE method. Let us consider a general nonlinear partial differential equation, say in two variables, of the form
Step 1: Since we’ll be looking for a traveling wave solution, using the wave variable \(\xi =\kappa x+\omega t,\) convert Eq. (7) into an ordinary differential equation for \(u=u(\xi )\)
where \(\kappa \) and \(\omega \) are nonzero real constants. Here, \(\kappa \) and \(\omega \) represent the wave number and frequency, respectively. Also, note that the wave speed v is given by \(-\frac{\omega }{\kappa }\), i.e., the wave moving to the left.
Step 2: We seek the solutions of Eq. (8) in the form
where \(\gamma _{k}\,(k=0,1,\ldots ,K)\) are all real constants with \(\gamma _{K}\ne 0\) and K is a positive integer to be determined. The function \(\phi (\xi )\) is the solution of the Riccati–Bernoulli sub-ODE (6). Depending on the sign of the discriminant \(\Delta =\beta ^{2}-4\alpha \gamma \), we can get the solutions of Eq. (6). For the present work, we will focus only on the two solutions, given by,
and
where \(\Delta =\beta ^{2}-4\alpha \gamma >0\) and \(\alpha \ne 0.\) The reader interested in other forms of solutions for Eq. (6) is referred to [29].
Step 3: The degree K of Eq. (9) can be determined by considering the homogeneous balance between the highest order derivatives and nonlinear terms appearing in Eq. (8).
Step 4: Substituting Eq. (6) together with Eq. (9) into Eq. (8) yields an algebraic equation involving the powers of \(\phi \). Equating the coefficients of each power of \(\phi \) to zero gives a system of algebraic equations for \(\alpha ,\beta ,\gamma \), and \(\gamma _{k}\,(k=0,1,\ldots ,K)\).
Step 5: With the aid of a computer algebra system, such as Maple, we can solve the obtained system of algebraic equations and we will end up with explicit expressions for \(\alpha ,\beta ,\gamma \), and \(\gamma _{k}\,(k=0,1,\ldots ,K)\) or any constraints between them.
Step 6: The traveling wave solutions of the nonlinear partial differential equation (7) can be obtained by substituting the values of \(\gamma _{k}\,(k=0,1,\ldots ,K)\) and the general solution of Eq. (6), in our case the expressions (10) or (11), into Eq. (9).
3 Application to the Fisher’s equation with nonlinear diffusion
Now, we would like to apply the method described above to obtain new exact traveling wave solutions to the Fisher’s equation with nonlinear diffusion. We will consider three different forms of density-dependent diffusivities. In the spirit of [25], these diffusivities are chosen to represent eco-evolutionary feedback so that overcrowding or sparsity of a population does not lead to its extinction.
3.1 Form I
We start with the Fisher’s equation in the form
where the diffusivity function \(D(u)=\frac{u+\lambda _{0}}{u-u^{2}}\) and \(\lambda _{0}\in {{\mathbb {R}}}\). In order to look for the traveling wave solution of Eq. (12), we make the transformation \(u(x,t)=u(\xi ),\) where \(\xi =\kappa x+\omega t,\) and change Eq. (12) into the following ODE
After some algebraic manipulation, we obtain
Considering the homogeneous balance between \(u^{3}\frac{\mathrm{d}^{2} u}{\mathrm{d}\xi ^{2}}\) and \(u^{6}\) in Eq. (13), \(\big (3K+K+2=6K \Leftrightarrow K=1\big )\), we simply seek the solutions of Eq. (13) of the form
where \(\phi =\phi (\xi )\) satisfies the Riccati–Bernoulli sub-ODE (6) and \(\gamma _{0}\) and \(\gamma _{1}\) are constants to be determined later.
Substituting Eqs. (6) and (14) into Eq. (13), setting \(m=0\) and collecting coefficients of polynomials of \(\phi ^{k}\,(k=0,1,\ldots ,6)\), then setting each coefficient to zero, we obtain a system of algebraic equations for \(\alpha ,\beta ,\gamma ,\gamma _{0}\), and \(\gamma _{1}\). Solving the resulting system with the aid of Maple, we obtain
where
and \(\beta ,\gamma _{1},\kappa \), and \(\omega \) are arbitrary nonzero real numbers such that \(\omega ^{2}\ge 4\kappa ^{2}\).
Substituting (15), noting \(\Delta >0\) when \(\omega ^{2}\ge 4\kappa ^{2}\), with the solutions (10) and (11) of Eq. (6) into Eq. (14), we obtain the exact traveling wave solutions of (12) as follows:
and
where
\(\epsilon =\pm 1,\) and \(\beta ,\kappa ,\) and \(\omega \) are nonzero real constants such that \(\omega ^{2}\ge 4\kappa ^{2}\). Note that because of \(\omega ^{2}\ge 4\kappa ^{2}\), we’ll have traveling wave solutions only for speeds \(v\ge 2\). This characteristic is the same as for the standard Fisher’s equation (1).
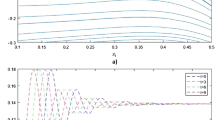
Equations (16) and (17) are exact traveling wave solutions of (12) with the diffusivity function \(D(u)=\frac{u+\lambda _{0}}{u-u^{2}}\) where \(\lambda _{0}\) is an arbitrary real number, traveling at speed \(v=-\frac{\omega }{\kappa }.\) Eq. (16) represents a kink/anti-kink wave solution, while Eq. (17) represents a complex-valued wave solution with real kink/anti-kink and imaginary bell/anti-bell wave shapes. Figure 1 shows that the slope of kink wave solution Eq. (16) varies with the value of its speed |v|. If |v| is large the wave shape is shallow, but it is steep if |v| is small. This behavior is also valid for the other solutions (see Fig. 2). The solutions in Figs. 1 and 2 are computed in the case when \(\beta =\gamma _{1}=\varepsilon =1\).
It should be noted that Eqs. (16) and (17) are also the exact traveling wave solutions of the nonlinear reaction–diffusion equations
and
where Eq. (19) can be obtained from (18) when \(\lambda _{0}=0\). Also, note that the solutions (16) and (17) do not depend on the constant \(\lambda _{0}\). Since the kink wave solution (16) is between 0 and 1, the constant \(\lambda _{0}\) needs to be greater than or equal to zero in order to have positive diffusivity.

The kink wave solution Eq. (16) calculated for different values of \(\omega \); \(\kappa =1,\omega =3,v=-3\) (Solid Line), \(\kappa =1,\omega =2.5,v=-2.5\) (Dash Line), and \(\kappa =1,\omega =2,v=-2\) (Dash-Dot Line): a At time \(t=0\), b At time \(t=1\)

The complex-valued wave solution Eq. (17) calculated at time \(t=0\) for different values of \(\omega \); \(\kappa =1,\omega =3,v=-3\) (Solid Line), \(\kappa =1,\omega =2.5,v=-2.5\) (Dash Line), and \(\kappa =1,\omega =2,v=-2\) (Dash-Dot Line): a The real kink wave shape, b The imaginary bell wave shape
3.2 Form II
We next consider the Fisher’s equation in the form
where the diffusivity function \(D(u)=(u-u^{2})^{-1}\). By using the transformation \(u(x,t)=u(\xi ),\) where \(\xi =\kappa x+\omega t,\) Eq. (20) is converted to the following ODE
After some algebraic manipulation, we obtain
Considering the homogeneous balance between \(u^{4}\frac{\mathrm{d}u}{\mathrm{d}\xi }\) and \(u^{6}\) in Eq. (21), we find \(K=1\). We then assume that Eq. (21) has the solution of the form
where \(\phi =\phi (\xi )\) satisfies the Riccati–Bernoulli sub-ODE (6) and \(\gamma _{0}\) and \(\gamma _{1}\) are constants to be determined later.
Substituting Eqs. (6) and (22) into Eq. (21), setting \(m=0\) and collecting coefficients of polynomials of \(\phi ^{k}\,(k=0,1,\ldots ,6)\), then setting each coefficient to zero, we obtain a system of algebraic equations for \(\alpha ,\beta ,\gamma ,\gamma _{0}\), and \(\gamma _{1}\). Solving the resulting system with the aid of Maple, we obtain
where \(\alpha ,\gamma _{0},\kappa \), and \(\omega \) are arbitrary nonzero real numbers.
Substituting (23), noting \(\Delta >0\), with the solutions (10) and (11) of Eq. (6) into Eq. (22), we obtain the exact traveling wave solutions of (20) as follows:
and
where \(\gamma _{0},\kappa \), and \(\omega \) are arbitrary nonzero real numbers.
Equations (24) and (25) are exact traveling wave solutions of (20) with the diffusivity function \(D(u)=(u-u^2)^{-1}\), traveling at speed \(v=-\frac{\omega }{\kappa }.\) Equation (24) represents a kink/anti-kink wave solution, while Eq. (25) represents a complex-valued wave solution with real kink/anti-kink and imaginary bell/anti-bell wave shapes. The slope of each traveling wave solution varies with the value of its speed |v|. Similar to the case in form I, if |v| is large the wave has a shallow slope, but it is steep if |v| is small (see Fig. 3).
It should be noted that Eqs. (24) and (25) are also the exact traveling wave solutions of the nonlinear reaction–diffusion equation
In addition, we can show that the solutions (24) and (25) are also the exact traveling wave solution of (20) with the diffusivity function \(D(u)=\lambda _{0}(u-u^2)^{-1},\) where \(\lambda _{0}\) is an arbitrary nonzero real number, and hence the solutions (24) and (25) don’t depend on the constant \(\lambda _{0}\). Since the kink wave solution (24) is between 0 and 1, the constant \(\lambda _{0}\) needs to be greater than zero in order to have positive diffusivity.

The kink wave solution Eq. (24) calculated at time \(t=0\) for different values of \(\omega \); \(\kappa =1,\omega =2,v=-2\) (Solid Line), \(\kappa =1,\omega =0.5,v=-0.5\) (Dash Line), and \(\kappa =1,\omega =0.1,v=-0.1\) (Dash-Dot Line)
3.3 Form III
Now, we consider the Fisher’s equation in the form
where the diffusivity function \(D(u)=2u.\) A minimum wave speed for the traveling wave solutions of Eq. (26) was found previously in [3] by analyzing the trajectories in the \(uu_{\xi }\)-phase plane. The minimum wave speed was found to be \(v=1\). This means that Eq. (26) has wave solutions with speeds \(v\ge 1\). In [14], Harris was able to find the exact traveling wave with the minimum wave speed \(v=1,\) namely
This solution is such that \(u(x,t)\ge 0\) when \(x\le {\bar{x}}\) and \(u(x,t)=0\) when \(x>{\bar{x}}\) for \(t\ge 0\). So, the solution profile has a cut-off point at \(x={\bar{x}}\). At this cut-off point, u(x, t) is continuous, but not differentiable with respect to x. The condition that \(u(x,t)\ge 0\) imposes a certain restriction on the constant c since the initial condition that generates the above solution is \(u(x,0)=1-c\exp \Big (\frac{x}{2}\Big ),\) for \(x\le 2\ln (\frac{1}{c})\equiv x^{\star }\) and \(u(x,0)=0,\) for \(x>x^{\star }.\) This implies that c is an arbitrary positive constant. In addition, one can see that the cut-off point \({\bar{x}}\) at \(t=0\) is given by \({\bar{x}}=x^{\star }\) and for any \(t>0\), \({\bar{x}}=x^{\star }+t\) (when the solution wave is moving to the right with speed 1).
Let us look for traveling wave solutions of (26) using the Riccati–Bernoulli sub-ODE method. As before, by using the transformation \(u(x,t)=u(\xi ),\) where \(\xi =\kappa x+\omega t,\) Eq. (26) is converted to the following ODE
Considering the homogeneous balance between \(\frac{\mathrm{d}u}{\mathrm{d}\xi }\) and \(u^{2}\) in Eq. (28), we find \(K=1\). Therefore, we suppose that the solution of Eq. (28) is of the form
where \(\phi =\phi (\xi )\) satisfies the Riccati–Bernoulli sub-ODE (6) and \(\gamma _{0}\) and \(\gamma _{1}\) are constants to be determined later.
Substituting Eqs. (6) and (29) into Eq. (28), setting \(m=2\) and collecting coefficients of polynomials of \(\phi ^{k}\,(k=0,1,\ldots ,4)\), then setting each coefficient to zero, we obtain a system of algebraic equations for \(\alpha ,\beta ,\gamma ,\gamma _{0}\), and \(\gamma _{1}\). Solving the resulting system with the aid of Maple, we obtain two kinds of solutions, namely
and
where \(\alpha ,\gamma _{0}\), and \(\kappa \) are arbitrary nonzero real numbers.
Substituting (31), noting \(\Delta >0\), with the solution (10) of Eq. (6) into Eq. (29), we obtain a new exact traveling wave solution (that has not been found in the literature) given by
Here, the wave speed is other than the minimum speed 1, it is 2 and the wave can travel either to the right or to the left.
As in the case of the solution in Eq. (27), the solution profile of Eq. (32) has a cut-off point \({\bar{x}}\). However, now, the solution is such that \(u(x,t)\le 1\) when \(x\le {\bar{x}}\) and \(u(x,t)=1\) when \(x>{\bar{x}}\) for \(t\ge 0\). The condition that \(u(x,t)\le 1\) imposes a certain restriction on the constant \(\gamma _{0}\) since the initial condition that generates the above solution is
for \(x\le 4\,\mathrm{arctanh}\left( \frac{1+\gamma _{0}}{1-\gamma _{0}}\right) \equiv x^{\star }\) and \(u(x,0)=1,\) for \(x>x^{\star }.\) This implies that \(\gamma _{0}\) is an arbitrary negative constant. Also, as before, the cut-off point \({\bar{x}}\) at \(t=0\) is given by \({\bar{x}}=x^{\star }\) and for any \(t>0\), \({\bar{x}}=x^{\star }-2t\) (when the solution wave is moving to the left with speed 2 as in Figure 4).

The traveling wave solution Eq. (32) calculated at time \(t=1\) for different values of \(\gamma _{0}\); \(\kappa =1,\gamma _{0}=-1\) (Solid Line), \(\kappa =1,\gamma _{0}=-2\) (Dash Line), and \(\kappa =1,\gamma _{0}=-4\) (Dash-Dot Line)
Finally, the choice of m in Eq. (6) is not just restricted to either 0 or 2. For instance, in Form III, in the case when \(m\notin \{0,2\}\) and after doing the same process as before, we obtain two kinds of solutions, namely
and
where \(\gamma _{1}\) and \(\kappa \) are arbitrary nonzero real numbers. Equations (33) and (34) are true for any value of m, other than \(m=0,1\) or 2. One can easily see that the wave speeds |v| that correspond to (33) and (34) are 1 and 2, respectively. Also, these traveling wave solutions given by Eqs. (33) and (34) are the same (with a phase difference) as the solutions in Eqs. (27) and (32), respectively.
4 Conclusions
We showed that the Riccati–Bernoulli sub-ODE method is a very useful technique for finding exact traveling wave solutions of the Fisher’s equation with nonlinear diffusion. It is interesting to note the effect of wave speed on the steepness of the solution profile. In the case of form I, as in the standard Fisher’s equation (1), wave solutions are possible for every wave speed greater than or equal to 2 [12, 13, 20]. For Eq. (1), wave solution in closed form can be found only for the wave speed \(\frac{5}{\sqrt{6}}\) [2]. However, for form I, as shown by Eq. (16), we are able to find kink wave solutions in closed forms for any wave speed that is greater than or equal to 2. Similarly, in the case of form II, using Eq. (24), we can obtain kink wave solutions in closed forms for any nonzero wave speed v. Further, for the case of form III, we are able to construct a wave solution at a speed that is not the minimum speed. The solutions obtained in this paper are new and, to our knowledge, have not been reported elsewhere. These exact solutions can be important predictive tools for practitioners in ecology and biology.
References
M.J. Ablowitz, P.A. Clarkson, Solitons, Nonlinear Evolution Equations and Inverse Scattering transform (Cambridge University Press, Cambridge, 1991)
M.J. Ablowitz, A. Zeppetella, Explicit solutions of Fisher’s equation for a special wave speed. Bull. Math. Biol. 41(6), 835–840 (1979)
D.G. Aronson, Density-dependent interaction-diffusion systems, in Dynamics and Modelling of Reactive Systems, ed. by W.E. Stewart (Academic Press, Cambridge, 1980), pp. 161–176
Z. Ayati, K. Hosseini, M. Mirzazadeh, Application of Kudryashov and functional variable methods to the strain wave equation in microstructured solids. Nonlinear Eng. Model. Appl. 6(1), 25–29 (2017)
R. Cherniha, V. Dutka, Exact and numerical solutions of the generalized Fisher equation. Rep. Math. Phys. 47(3), 393–411 (2001)
D.S. Cohen, J.R.A.B. White, Sharp fronts due to diffusion and stress at the glass transition in polymers. J. Polym. Sci., Part B: Polym. Phys. 27(8), 1731–1747 (1989)
R.W. Cox, Stress-assisted diffusion: a free boundary problem. SIAM J. Appl. Math. 51(6), 1522–1537 (1991)
R.W. Cox, D.S. Cohen, A mathematical model for stress-driven diffusion in polymers. J. Polym. Sci., Part B: Polym. Phys. 27(3), 589–602 (1989)
V.G. Danilov, V.P. Maslov, K.A. Volosov, Mathematical Modelling of Heat and Mass Transfer Processes, Mathematics and Its Applications Book Series (MAIA, volume 348) (Springer, Berlin, 1995)
E. Fan, H. Zhang, A note on the homogeneous balance method. Phys. Lett. A 246(5), 403–406 (1998)
Q.H. Feng, B. Zheng, Traveling wave solutions for the fifth-order Sawada–Kotera equation and the general Gardner equation by (\(\frac{G^\prime }{G}\))-expansion method. WSEAS Trans. Math. 9(3), 171–180 (2010)
R.A. Fisher, The wave of advance of advantageous genes. Ann. Hum. Genet. 7(4), 355–369 (1937)
P. Grindrod, The Theory and Applications of Reaction–Diffusion Equations: Patterns and Waves (Clarendon Press, New York, 1996)
S. Harris, Fisher equation with density-dependent diffusion: special solutions. J. Phys. A: Math. Gen. 37(24), 6267–6268 (2004)
C.K. Hayes, Diffusion and stress driven flow in polymers. Doctoral Dissertation, California Institute of Technology (1990)
C.K. Hayes, A new traveling-wave solution of Fisher’s equation with density-dependent diffusivity. J. Math. Biol. 29(6), 531–537 (1991)
J.H. He, X.H. Wu, Exp-function method for nonlinear wave equations. Chaos Solitons Fractals 30(3), 700–708 (2006)
R. Hirota, Exact solution of the Korteweg–De Vries equation for multiple collisions of solitons. Phys. Rev. Lett. 27(18), 1192–1194 (1971)
K. Hosseini, A. Zabihi, F. Samadani, R. Ansari, New explicit exact solutions of the unstable nonlinear Schrödinger’s equation using the Exp\(_a\) and hyperbolic function methods. Opt. Quant. Electron. 50(2), 82 (2018)
A.K. Kolmogorov, N.P. Petrovsky, S.P. Piscounov, Etude de I equations de la diffusion avec croissance de la quantitate de matiere et son application a un probolome biologique. Bull. Univ. Mosc. 1, 1–25 (1937)
D. Ludwig, D.G. Aronson, H.F. Weinberger, Spatial patterning of the spruce budworm. J. Math. Biol. 8(3), 217–258 (1979)
J.D. Murray, Mathematical Biology I: An introduction (Springer, Berlin, 2002)
J.D. Murray, Nonlinear Differential Equation Models in Biology (Clarendon Press, Oxford, 1977)
W.I. Newman, Some exact solutions to a non-linear diffusion problem in population genetics and combustion. J. Theor. Biol. 85(2), 325–334 (1980)
H.J. Park, C.S. Gokhale, Ecological feedback on diffusion dynamics. R. Soc. Open Sci. 6(2), 181273 (2019). https://doi.org/10.1098/rsos.181273
S. Sirendaoreji, J. Sun, Auxiliary equation method for solving nonlinear partial differential equations. Phys. Lett. A 309(5–6), 387–396 (2003)
M.O. Vlad, S.E. Szedlacsek, N. Pourmand, L.L. Cavalli-Sforza, P. Oefner, J. Ross, Fisher’s theorems for multivariable, time-and space-dependent systems, with applications in population genetics and chemical kinetics. Proc. Nat. Acad. Sci. 102(28), 9848–9853 (2005)
M.L. Wang, Exact solution for a compound KdV-Burgers equations. Phys. Lett. A 213(5–6), 279–287 (1996)
X.-F. Yang, Z.-C. Deng, Y. Wei, A Riccati-Bernoulli sub-ODE method for nonlinear partial differential equations and its application. Adv. Differ. Equ. 1, 117–133 (2015)
Acknowledgements
Funding from Washington State University is acknowledged by author Lewa’ Alzaleq.
Funding
Author Lewa’ Alzaleq is funded by Washington State University as a post-doctoral researcher.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Availability of data and material
This work is analytical and does not use any data or material.
Rights and permissions
About this article

Cite this article
Alzaleq, L., Manoranjan, V. Exact traveling waves for the Fisher’s equation with nonlinear diffusion. Eur. Phys. J. Plus 135, 658 (2020). https://doi.org/10.1140/epjp/s13360-020-00667-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1140/epjp/s13360-020-00667-3