
Abstract
In the present work, a numerical scheme is constructed for approximation of a class of Volterra integral equations of convolution type with highly oscillatory kernels. The proposed numerical technique transforms Volterra integral equations of convolution type into simple algebraic equations. By the inverse transform, the problem is converted into an integral representation in the complex plane, and then computed by a suitable quadrature formula. The numerical scheme is applied to a class of linear and nonlinear Volterra integral equations of convolution type with highly oscillatory kernels and some of the obtained results are compared with the methods available in the literature. The main advantage of the present scheme is the transformation of highly oscillatory problem to non-oscillatory and simple problem. So, a large class of similar integral equations having highly oscillatory kernels can be approximated very effectively.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1. INTRODUCTION
Integral equations with oscillatory kernels have numerous applications in many fields of sciences and engineering like electrostatics, mechanics, fluid mechanics [1, 2], and many others. Among these, the Volterra integral equations (VIEs) with convolution type kernels are the most important (see, for example, [3–5] and references therein). For accurate computations of highly oscillatory integrals of convolution type, many methods have been developed over the years. In many cases, exact analytical solutions of such type integral equations with highly oscillatory kernels cannot be obtained in a closed form. Consequently, numerical methods may be a good alternative for efficient computation of such type of models (see, for example, [6, 7]). Some of the best numerical methods developed very recently can be found in [8–10]. The most important feature of such problems is the oscillation parameter \(\omega\gg 1\), which occurs in the kernel of integral equations and thus becomes extremely oscillatory. In that case, most of the standard collocation methods may face difficulty when applied to solving integral equations with large oscillations [8, 11–14].
First-kind Volterra integral equations of more general form that have been studied numerically in the past can be found in [6, 15–17]. The specially developed methods, where an integral is approximated, contain a large oscillation parameter. The computations of such integrals by quadrature methods are always difficult and require high costs [18, 19]. The Filon-type approximate methods have been proved to be the best for approximating integral equations with highly oscillatory kernels [11, 20–22]. More research is still needed to fully explore the oscillatory behavior of such oscillatory integral equations theoretically and numerically. In this study, the main objective is to approximate VIEs with highly oscillatory kernels of convolution type by a transform based method. The VIEs with highly oscillatory kernels considered in this study are defined by
where \(\omega\) is the oscillation parameter, \(\kappa(x,t)\) and \(g(x,t)\) is the difference kernel and oscillator, respectively, \(f(t)\) is some smooth function, and \(F\) is an unknown nonlinear function. So, we replace the unknown nonlinear function by another unknown linear function and solve the new linear VIE with highly oscillatory kernels.
2. ANALYSIS OF THE METHOD FOR VOLTERRA INTEGRAL EQUATIONS
Suppose that \(y(t)\) is a function of the variable \(t\), for which the Laplace transform exists:
and consequently its inverse Laplace transform also exists:
A convolution type VIE can often be easily handled with the pair of Laplace transforms [23,24]. Let \(y(t)\) be the solution of VIE (0.1). Then its inverse transform \(\hat{y}\) is an extension in the space \(Z\) of a subset of the complex plane and is given by
where
and outside of this sector \(\Sigma_{\theta}\), the function \(\hat{y}(s)\) holds the condition
Consequently, there exists a constant \(C_\theta >0\) such that
So, the inversion Laplace transform formula is reduced to the form
where the contour \(\Theta\) joins the limits \(c-\iota \infty\) and \(c+\iota \infty\). The parametric representation of the path \(\Theta\) is defined as \(\sigma:(a,b) \rightarrow \mathcal{C}\). So, \(y(t)\) is given by
The above integral is approximated by the classical technique [25,26], involving the equal width rule. So, for a given \(N \geq1\), \(h>0\), \(x_k = kh\), \(-N:k:N\), the solution \(y(t)\) of VIE (0.1) at any \(t > 0\) can be computed by the following numerical scheme:
For the computation of the inverse \(\hat{y}\) for the interval \((-\infty,+\infty)\), Talbot’s algorithm using the interval \((-\pi,\pi)\) and the modification using the interval \((a,b)\), are very helpful for finding the error estimates by the trapezoidal rule:
We use (1.2) when selecting \(\theta\). Then for \(d>0\), \(\alpha\) can be chosen so that the following inequalities are satisfied:
For the mapping \(\zeta(w)=-\sin(\alpha+\iota w)\), \(w= x+\iota Y\), it is easy to show that the transformation \(\zeta\) converted the horizontal path \(\mathrm{ Im}\, {w} = Y\), where \(-d < Y < d,\) into the left branch of the hyperbola in the following equation:
Therefore, \(\zeta\) converted the stripe \(S_d\) to the left branches when \(Y = \pm d\). Let \(\lambda >0\), then we have the mapping
Consequently, \(\Theta\) is obtained in its parametric form and we can compute the following:
where the mapping \(Q_t : S_d \rightarrow X\), \(t>0\), is defined by
The main advantage of numerical scheme (1.6) is its non-oscillatory nature, which can be computed very easily and accurately. Another advantage is that the approximate solution \(u(t)\) at different times and its transform \(\hat{y}\) when \(- N:k:N\) can be computed very efficiently in parallel. Once the optimal parameters are chosen for the selected path \(\sigma\), we can maintain a uniform error over the time interval \([t_0,\wedge t_0]\) with moderate \(\ \wedge \geq 1\), for any time \(t \in (t_0, T)\), where \(T=\wedge t_0\), \(t_0 \geq 0 \) [27].
2. NUMERICAL EXAMPLES AND APPLICATION

Numerical solution of Problem 1: actual and estimated errors against \(N\) and \(\omega\) and comparison of exact and numerical solution.

Numerical solution of Problem 2: actual and estimated errors against \(N\) and \(\omega\) and comparison of exact and numerical solution.

Numerical solution of Problem 3: actual and estimated errors against \(N\) and \(\omega\), and comparison of exact and numerical solution.
The constructed numerical scheme is applied both for linear and nonlinear Volterra integral equations (0.1) with highly oscillatory kernels. The method has been tested in terms of error versus quadrature nodes and error versus oscillation parameters and was also compared with other methods. The above hyperbolic contour has been derived in the following form:
For the best accuracy of all computations, the following optimized shape parameters, corresponding to the hyperbolic path defined above, can be used: \(\eta=2\), \(\alpha= 0.3812\), \(\lambda=\frac{\delta r_b N}{\varepsilon T}\), \(x_k=hk\), with \(\delta =0.1\), \(r_b=2\pi r\), \(r=0.3431\), \(x_k=hk\), \(\varepsilon=\cosh^{-1}(\frac{1}{\delta \tau \sin(\alpha)})\), \(h=\varepsilon/N\), \(\tau=t_0/T\), \(t_0=0.1\), \(T=5\).
Theorem 1 [28]. The unique solution of a first-kind VIE with the linear operator
is given by
where \(r_1(t-x)=\kappa^{\prime}(t-x)\) and it is assumed that \(\kappa(0)=1\).
Problem 1. We consider VIE (0.1) for the following functional:
where the exact solution can be obtained from (2.3):
The numerical solution of VIE (2.4) for various values of parameters involved is obtained by the present numerical scheme and shown in Fig. 1. The actual error and error estimate \(e^{\frac{-c N}{\ln N}}\) of the numerical scheme with \(c=1\) are in good agreement when \(5 < N< 10^2\). Figure 1 also shows the actual error versus the parameter \(\omega\); one can see high accuracy with \(1< \omega <10\), a sudden drop in the accuracy, then a gradual increase in the accuracy for \(10 < \omega < 10^5\), and then a gradual decrease in the accuracy when \(\omega > 10^5\). Figure 1 also indicates that for highly oscillatory kernels, the solution is non-oscillatory.
Problem 2. We consider VIE (0.1) in the following form:
Let \(v(x)=\ln(y(x))\). We perform the Laplace transform and get the solution
The exact solution of the problem is defined by
We have solved this problem by the present method for various values of quadrature nodes along the hyperbolic contour and oscillation parameter. The results are shown in Fig. 2. Figure 2 presents a comparison of the actual error and the error estimate \(e^{\frac{-c N}{\ln N}}\) for \(c=1\) of the numerical scheme for various quadrature nodes; the actual and estimated errors are in good agreement when \(1<N < 10^2\). It is worth noting that the solution in this case is oscillatory and the accuracy decreases with increase in the oscillation parameter \(\omega\).
Problem 3. In this problem, we consider the following VIE integral equation:
Let \(\ v(x)=y^{2}(x)\). Performing the Laplace transform, we get the solution
The exact solution of this problem is defined by
The problem is solved for various quadrature nodes \(N\) with the varying oscillation parameter \(\omega\); the results are shown in Fig. 3. The solution of this problem is non-oscillatory; it can be seen in Fig. 3, where the accuracy increases with growth of the oscillation parameter. The actual error and error estimates are well comparable in a certain range of quadrature nodes.
Problem 4. In the last problem we consider the following linear integral equation with highly oscillatory kernels:
where \(\omega\) is the oscillation parameter, \(0 < \alpha < 1\), and the exact solution is given by
where the function \(r(x)\) is defined by
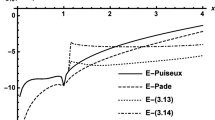
This particular problem is selected for comparison of the results of the present numerical scheme with the results of other methods. The numerical and exact solutions of this problem at different times are shown in Table 1. Values for various other quadrature nodes \(N\) and increasing values of the oscillation parameter \(\omega\) are shown in Table 2. In comparison, the present numerical method performed better than the method discussed in [29].
3. CONCLUSIONS
Solving linear and nonlinear Volttera integral equations with highly oscillatory kernels is a challenging task due to the presence of oscillation parameter in the VIE kernels, particularly so when these VIEs have oscillatory solutions. The numerical algorithms developed over the years for computing the inverse Laplace transform are mostly less accurate and ill-conditioned (see, for example, [31,31] and the references therein). However, the present numerical method, which is based on computing the inverse Laplace transform formula numerically, performed well. We applied the numerical scheme for linear and some nonlinear VIEs with highly oscillatory kernels and obtained results of very high order accuracy. The actual error and the error bound of the numerical scheme are in very good agreement over a range of quadrature nodes. The present numerical scheme is a very good alternative for similar types of VIEs with highly oscillatory kernels.
REFERENCES
Ding, H.J., Wang, H.M., and Chen, W.Q., Analytical Solution for the Electroelastic Dynamics of a Nonhomogeneous Spherically Isotropic Piezoelectric Hollow Sphere, Arch. Appl. Mech., 2003, vol. 73, nos. 1/2, pp. 49–62.
Baratella, P., A Nyström Interpolant for Some Weakly Singular Linear Volterra Integral Equations, J. Comput. Appl. Math., 2009, vol. 231, no. 2, pp. 725–734.
Chill, R. and Prüss, J., Asymptotic Behaviour of Linear Evolutionary Integral Equations, Integral Eq. Operator Th., 2001, vol. 39, no. 2, pp. 193–213.
Kumar, S., Kumar, A., Kumar, D., Singh, J., and Singh, A., Analytical Solution of Abel Integral Equation Arising in Astrophysics via Laplace Transform, J. Egypt. Math. Soc., 2015, vol. 23, no. 1, pp. 102–107.
Chandler-Wilde, S.N., Graham, I.G., Langdon, S., and Spence, E.A., Numerical Asymptotic Boundary Integral Methods in High-Frequency Acoustic Scattering, Acta Num., 2012, vol. 21, pp. 89–305.
Brunner, H., Collocation Methods for Volterra Integral and Related Functional Differential Equations, Cambridge Univ. Press, 2004.
Kirane, M. and Rogovchenko, Yu.V., On Oscillation of Nonlinear Second Order Differential Equation with Damping Term, Appl. Math. Comput., 2001, vol. 117, nos. 2/3, pp. 177–192.
Davies, P.J. and Duncan, D.B., Stability and Convergence of Collocation Schemes for Retarded Potential Integral Equations, SIAM J. Num. An., 2004, vol. 42, no. 3, pp. 1167–1188.
Brunner, H., Davies, P.J., and Duncan, D.B., Discontinuous Galerkin Approximations for Volterra Integral Equations of the First Kind, IMA J. Num. An., 2009, vol. 29, no. 4, pp. 856–881.
Xiang, S., Laplace Transforms for Approximation of Highly Oscillatory Volterra Integral Equations of the First Kind, Appl. Math. Comput., 2014, vol. 232, pp. 944–954.
Wang, H. and Xiang, S., Asymptotic Expansion and Filon-Type Methods for a Volterra Integral Equation with a Highly Oscillatory Kernel, IMA J. Num. An., 2011, vol. 31, no. 2, pp. 469–490.
Almeida, R., Jleli, M., and Samet, B., A Numerical Study of Fractional Relaxation–Oscillation Equations Involving ψ—Caputo Fractional Derivative, Revista de la Real Academia de Ciencias Exactas, Físicas y Naturales. Serie A. Matemáticas, 2019, vol. 113, no. 3, pp. 1873–1891.
Shomaila, M., Islam, S.U., and Zaman S., On Numerical Computation of Three Dimensional Highly Oscillatory Integrals, Math. Sci. Engin. Appl. (NCMSEA-2018), p. 101.
Islam, S.U., Al-Fhaid, A.S., and Zaman S., Meshless and Wavelets Based Complex Quadrature of Highly Oscillatory Integrals and the Integrals with Stationary Points, Engin. An. Bound. El., 2013, vol. 37, no. 9, pp. 1136–1144.
Linz, P., Product Integration Methods for Volterra Integral Equations of the First Kind, BIT Num. Math., 1971, vol. 11, no. 4, pp. 413–421.
de Hoog, F. and Weiss, R., On the Solution of Volterra Integral Equations of the First Kind, Numerische Math., 1973, vol. 21, no. 1, pp. 22–32.
McAlevey, L.G., Product Integration Rules for Volterra Integral Equations of the First Kind, BIT Num. Math., 1987, vol. 27, no. 2, pp. 235–247.
Levin, D., Fast Integration of Rapidly Oscillatory Functions, J. Comput. Appl. Math., 1996, vol. 67, no. 1, pp. 95–101.
Iserles, A. and Nørsett, S.P., On Quadrature Methods for Highly Oscillatory Integrals and Their Implementation, BIT Num. Math., 2004, vol. 44, no. 4, pp. 755–772.
Branders, M. and Piessens, R., An Extension of Clenshaw–Curtis Quadrature, J. Comput. Appl. Math., 1975, vol. 1, no. 1, pp. 55–65.
Piessens, R. and Branders, M., Modified Clenshaw–Curtis Method for the Computation of Bessel Function Integrals, BIT Num. Math., 1983, vol. 23, no. 3, pp. 370–381.
Xiang, S., Gui, W., and Mo, P., Numerical Quadrature for Bessel Transformations, Appl. Num. Math., 2008, vol. 58, no. 9, pp. 1247–1261.
Polyanin, A.D. and Manzhirov A.V., Handbook of Integral Equations, CRC Press, 1998.
Sprössig, W. and Venturino, E.K., The Treatment of Window Problems by Transform Methods, Zeitschrift für Analysis und ihre Anwendungen, 1993, vol. 12, no. 4, pp. 643–654.
Talbot, A., The Accurate Numerical Inversion of Laplace Transforms, IMA J. Appl. Math., 1979, vol. 23, no. 1, pp. 97–12.
Sheen, D., Sloan, I.H., and Thomée, V., A Parallel Method for Time Discretization of Parabolic Equations Based on Laplace Transformation and Quadrature, IMA J. Numer. An., 2003, vol. 23, no. 2, pp. 269–299.
López-Fernández, M. and Palencia, C., On the Numerical Inversion of the Laplace Transform of Certain Holomorphic Mappings, Appl. Numer. Math., 2004, vol. 51, nos. 2/3, pp. 289–303.
Brunner, H., On Volterra Integral Operators with Highly Oscillatory Kernels, Discret. Contin. Dyn. Syst., 2014, vol. 34, pp. 915–929.
Ma, J., Xiang, S., and Kang, H., On the Convergence Rates of Filon Methods for the Solution of a Volterra Integral Equation with a Highly Oscillatory Bessel Kernel, Appl. Math. Lett., 2013, vol. 26, no. 7, pp. 699–705.
Wu, Q., On Graded Meshes for Weakly Singular Volterra Integral Equations with Oscillatory Trigonometric Kernels, J. Comput. Appl. Math., 2014, vol. 263, pp. 370–376.
Davis, P.J. and Rabinowitz, P., Methods of Numerical Integration, Courier Corporation, 2007.
Obi, W.C., Error Analysis of a Laplace Transform Inversion Procedure, SIAM J. Num. An., 1990, vol. 27, no. 2, pp. 457–469.
Author information
Authors and Affiliations
Corresponding authors
Additional information
Translated from Sibirskii Zhurnal Vychislitel’noi Matematiki, 2021, Vol. 24, No. 4, pp. 435-444. https://doi.org/10.15372/SJNM20210407.
Rights and permissions
About this article

Cite this article
Uddin, M., Khan, A. A Numerical Method for Solving Volterra Integral Equations with Oscillatory Kernels Using a Transform. Numer. Analys. Appl. 14, 379–387 (2021). https://doi.org/10.1134/S1995423921040078
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S1995423921040078