
Abstract
The viscoelastic behavior of anisotropic composite is studied in this paper. Constitutive relations and equilibrium equations are derived for a Kirchhoff plate using general linear viscoelasticity constitutive relations for the anisotropic case. The derived model parameters—plate stiffnesses—are experimental functions. An approach to these parameters identification is given for certain cases of material properties.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 INTRODUCTION
Viscoelastic properties study is one of the most dynamically developing branches of material science, as well as composite mechanics. For applications, some simplified models like rods, plates, and shells are significant.
This paper comes to continue papers [1–6], dedicated to the construction of composite mechanics models of nonhomogeneous anisotropic rods and plates. Two results are presented there: following the approach stated in [5] a plate model is derived for time-dependent material properties, as a generalization of the elastic case; and an approach to the said model identification method.
The method of model construction is based on classical for engineering mechanics approach of reducing three-dimensional continuum equilibrium equations into two-dimensional field equations. The considered reduction is based on kinematical and statical hypotheses, but there are also different methods like the power series expansion, asymptotic methods, etc, some of them are illustrated in [7–12]. Such approaches, first arising in linear elasticity tasks, were successfully generalized for an anisotropic, nonhomogeneous case, as well as for isotropic viscoelastic case. This paper presents a version of anisotropic viscoelastic plates theory—an isotropic one is enough for some thin structures like foams [16–18], but an increase of thickness leads to the significant influence of anisotropy. A noticeable difficulty of anisotropic viscoelasticity constitutive relations usage lies in asymmetric modulus tensor [19], which does not occur in the isotropic case, but still allows using Kirchhoff hypothesis [13]. In accordance with an approach [20] of reducing identification problem into a least-squares one a set of experimental tests, as well as a data processing method, were supplied by one of the authors for an elastic plate, this paper is conscripted to suggest a solution for a linear viscoelastic plate.
A classical coordination of a plate is used; small Latin indexes \(i,j\) are supposed to \(\in[1..3]\), big Latin indexes \(I,J\) \(\in[1..2]\), a comma represents partial spatial derivative \(a_{,j}=\frac{\partial a}{\partial x_{j}}\), a dot is derivative with respect to time.
2 MECHANICAL MODEL
First of all, the mechanical models for kinematics and statics and constitutive relations for this plate are introduced.
2.1 Kinematical and Statical Relations of Thin Plate
The thickness (\(h\)) of a plate (\(\Pi\)) is assumed to be significantly less than linear sizes of \(\Pi\) (we also suppose \(\Pi\) is rectangular in a plane, so \(\Pi=a*b*h\)), \({h}{/\textrm{min}\{a,b\}}<0.1\). This assumption allows to name plate a thin one, and also to use the technique of homogenization concerning the basic plane. Usually, the median plane, equidistant for facial surfaces, is used as a basic one; this paper also follows this approach.
The basic idea of homogenization is tied with the kinematical assumptions method. Some kind of physical assumption must be introduced to establish a relation between deformations (as well as displacements) of the whole plate and its median plane, the said relation allows to compute deformations an arbitrary point of a plate using its coordinates and information about the deformed state of the median plane. There are various assumptions, as well as a generalization of notion ‘‘kinematical assumption’’ in a formal functional way, but this paper is based on a Kirchhoff assumption. So, a deformation of a plate in respect to neutral fiber (straight and orthogonal to the undeformed median plane)
-
keeps it straight,
-
may not modify its length,
-
keeps it orthogonal to the deformed median plane.
As per deformation tensor, the Kirchhoff assumption may be written as \(\varepsilon_{IJ}=\varepsilon_{IJ}(x_{1},x_{2}),\,\varepsilon_{I3}=0,\,\varepsilon_{33}=0\). For further computations a relation in terms of displacements is preferred: conditions for deformations may be solved as a system of partial differential equations. The solution
is usually called Kirchhoff plate displacement. For further computations it is necessary to define kinematical factors: plane curvatures \(\varkappa_{IJ}\) and plane deformations \(e_{IJ}\),
Mechanics of rods and plates appeals to the internal force factors (instead of the stress tensor) as a main force parameter. Force factors of a plate are defined as a homogenization of stress tensor components with respect to thickness:
Here \(T_{IJ}\) are in-plane forces, \(Q_{I}\) are transverse shear forces, and \(M_{IJ}\) are bending moments. Equilibrium equations for force factors are a generalization of classical plate equations
\(q_{I}\) and \(q\) are the surface loads—mass and surface forces and moments homogenization [5].
2.2 Constitutive Equations
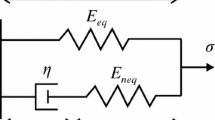
The material is supposed to be linear viscoelastic and orthotropic with respect to median plane. The constitutive relations are a geometrical generalization of classical linear viscoelasticity constitutive relations [21]
The relaxation and compliance functions are mutually inverse, \(\int\limits_{0}^{t}R_{ijkl}(t-\tau)d\Pi_{klmn}(\tau)=\Delta_{ijmn}\), \(\Delta\) is a unit tensor.
Relations (4) are formulated for a general anisotropic linear viscoelastic body. It is essential to transform these relations into special relation(-s), which should establish a correspondence between force factors and kinematical factors of a plate. This transformation is based on force factors definition (2) and first constitutive relation (4). It may be simplified into \(\sigma_{ij}=\int\limits_{0}^{t}R_{ijKL}(t-\tau)\dot{\varepsilon}_{KL}(\tau)d\tau+R_{ijKL}(t)\varepsilon_{KL}(0)\) taking into account the kinematical assumption. So,
Substitution of (1) leads to
A generalization of nonhomogeneous plate stiffnesses is defined there: \(A_{IJKL}(t)=\int\limits_{-h/2}^{h/2}R_{IJKL}(t)dx_{3}\) are compressional stiffnesses, \(B_{IJKL}(t)=\int\limits_{-h/2}^{h/2}R_{IJKL}(t)x_{3}dx_{3}\) are transverse shear stiffness, \(D_{IJKL}(t)=\int\limits_{-h/2}^{h/2}R_{IJKL}(t)x_{3}^{2}dx_{3}\) are bending stiffnesses. For a viscoelastic tensor \(R_{IJKL}\) of odd with respect to \(x_{3}\) components multilayer influence stiffnesses are absent: \(B_{IJKL}=0\), bending deformations and plane deformations of this plate are independent. Different components of \(R_{IJKL}(t)\) may be different time-functions.
In light of practical importance, only bending is considered.
2.3 Equilibrium Equations of a Plate
Direct substitution of (5) into (3) results into equilibrium equations of a plate
This representation may be shorted and transformed by introducing notations \(\langle f\rangle=\frac{1}{h}\int\limits_{-h/2}^{h/2}fdx_{3},\) \(R[\varepsilon]_{IJ}=\int\limits_{0}^{t}R_{IJKL}(t-\tau)\dot{\varepsilon}_{KL}(\tau)d\tau\). The result may be called a shortened form of equilibrium equations:
\(R\) is an operator in time-domain, \(\langle\rangle\) is a spatial one with respect to thickness, \({}_{,I}\) and \({}_{,IJ}\) are spatial with respect to plane.
Similar to the elastic case, one needs four boundary conditions for every point of the boundary contour to close the system. Also due to a dynamical effect, an initial condition for curvatures and deformation is needed. Two types of boundary conditions may occur:
-
kinematical conditions, \(w_{i}\big{|}_{\partial\Pi}=f_{i}(x_{1},x_{2}),\,\frac{dw_{i}}{dn}\big{|}_{\partial\Pi}=g_{i}(x_{1},x_{2})\),
-
statical conditions, \(T_{IJ}n_{J}\Big{|}_{\Gamma}=T_{I}^{0},\) \((Q_{I}n_{I}+\frac{d}{ds}(\epsilon_{KI}n_{K}M_{IJ}n_{J}))\Big{|}_{\Gamma}=Q^{0}+(\epsilon_{JI}M^{0}_{I}n_{J}),\) \(M_{IJ}n_{I}n_{J}\Big{|}_{\Gamma}=M_{I}^{0}n_{I}\) [5].
3 MODEL IDENTIFICATION
One of the important focuses of any mechanical model is the identification problem. For a static loading of an orthotropic Kirchhoff plate, it becomes the problem of experimental stiffness computation. This problem has some well-known solutions for an elastic isotropic plate as well as some solutions for the non-isotropic case using different computation methods. It is necessary to note an approach of minimization of the error on constitutive law [15]. Viscoelastic and even linear viscoelastic cases differ significantly: the identification object is a set of time-functions instead of a set of constant values; as it was mentioned above, one of moduli symmetry conditions is absent: \(C_{IJKL}\neq C_{KLIJ}\) [19], different components of \(C\) are different time-functions. However, we are also going to follow the approach, stated in [15], by rewriting the constitutive equations into a state-space form [22] and solving a linear system.
It is necessary to propose a set of experiments and a data processing algorithm, which allows computing the relaxation function of the investigated material. One of the favorable features of the identification problem is the possibility to choose the most convenient for further computations loading program. A loading, which makes possible an analytical solution of the equation of moments (3), will be called a simple one. The identification problem is stated and studied there for any simple loading for a plate. The particular character of loading is supposed to be predetermined, as well as any necessary loading parameters, that allow concluding \(M_{IJ}=M_{IJ}(x_{1},x_{2})\) are known.
Some restriction on material properties is introduced to simplify the task. Let us assume \(R\) to have in-plane areas of constant material properties with a surface, sufficient for at least 5 curvatures measurements. The practical boundaries of these areas are equipment-dependent. Otherwise, a facial plane \(\Sigma_{0}\) may be covered by a set of \(U_{i},i\in(1..n)\), \(\Sigma_{0}=\cup U_{i}\), \(U_{i}\cap U_{j}\subset\partial U_{i}\cap\partial U_{j}\), \(R_{IJKL}\big{|}_{U_{i}}=R_{IJKL}(t)\). Further analysis is processed on a fixed \(U_{i}\).
The momentum equilibrium equation (6) for a fixed \(U_{i}\) transforms into
For a simple loading identification problem may be solved using the constitutive relations
where \(M\) and \(\varkappa\) are measured. Continuous-time representation should be replaced by a discrete-time one using a unit-step discretization:
The goal is to identify stiffnesses, using \(e_{IJ}\) and \(\varkappa_{IJ}\) measurements, as well as information about loading (\(M_{IJ}\) and \(T_{IJ}\) are supposed to be known). For a fixed \(l\) there are two approaches to compute \(A,B,D(l)\): one may use previous values \(A,B,D(l-1)\dots A,B,D(0)\) and interpret (7) and (8) as equations on variables \(A,B,D(l-1)\) or to recalculate all the stifness values for every new measurement and post-process the array of results.
3.1 State-Space Form of Equilibrium Equations
For a full asymmetry of the plate analysis of the \(R_{IJKL}\) identification problem is more efficient in comparison with \(A,B,D\) identification. The identification procedure, based on plate equations, may be more efficient only for symmetry, which results into \(B=0\), at least \(\forall U_{i}\) (this condition does not affect \(D_{1122}\neq D_{2211}\)). So (7) and (8) simplify into the uncoupled equations
Let
here \(1\dots n\) are dots of measurements, located in \(U_{i}\). The said notation allows rewriting (9) into a system of ordinary linear equations
\(E(t)\) and \(K(t)\) are matrixes of plane deformation and curvatures:
So (10) becomes an overdetermined system of linear algebraic equations on \(\overrightarrow{a}\) and \(\overrightarrow{d}\).
3.2 Solution
The said system (10) is overdetermined in general case of dependance \(M_{IJ}=M_{IJ}(x_{1},x_{2}),\,T_{IJ}=T_{IJ}(x_{1},x_{2})\). For example, the case of pure bending corresponds to \(M_{IJ}=const\), and system (10) becomes underdetermined due to a linear dependance between strings of \(E\) and \(K\). However, components of these matrixes are a result of noisy measurements and numerical spatial differentiation, so in practical tasks the system (10) may be considered as overdetermined. As usual, an overdetermined system may be solved by a least-squares method, but model data testing shows the necessity of a large number of measurements (over 100 spatial measurements) for acceptable accuracy of the method (5% error). This phenomenon occurs due to the erroneous calculation of deformations and curvatures caused by numerical differentiation of measured displacements.
A solution of an overdetermined system with additive noise in the matrix may be found using the total least squares [23] approach, so \(\tilde{d}(l),\,\tilde{a}(l)\) may be calculated using a singular value decomposition procedure [25].
Practical testing show low accuracy of the method (for some combinations of model properties, estimated stiffnesses are even negative). This error may be corrected by including a set-type restriction [27] on \(\tilde{d}\): \(\tilde{d}\) components are a result of relaxation function integration, so \(\tilde{d}(t)\) must be positive \(\forall t\) and must not increase in time: \(\tilde{d}(l)\leqslant\tilde{d}(k)\forall k<l\), the same for \(a\). Finally
here \(||a||^{2}\) is a standard Euclidean vector norm and Frobenius matrix norm.
4 CONCLUSION
To sum up, this paper presents an approach to the identification of an anisotropic viscoelastic plate model. A simple version of model derivation, based on Kirchhoff’s kinematical assumption was considered there. To supply an identification procedure we have also introduced some additional assumptions on material properties symmetries. However, even this case became nontrivial to consider: the state-space form of identification problem is an overdetermined system of linear equations with noisy matrix, for particular cases of loading columns of this matrix are close to linear dependency. That does not allow us to apply the classical least-squares approach: one needs to use some modified total least-squares approach. The suggested approach is step-by-step in time, so the further goal is to derive a simultaneous one (to reduce error accumulation). Also, an analysis of estimation quality is planned.
REFERENCES
V. I. Gorbachev and T. M. Mel’nik, ‘‘Formulation of problems in the Bernoulli-Euler theory of anisotropic inhomogeneous beams,’’ Mosc. Univ. Mech. Bull. 73, 18–26 (2018).
V. I. Gorbachev and O. B. Moskalenko, ‘‘Stability of a straight bar of variable rigidity,’’ Mech. Solids 46, 645–655 (2011).
V. I. Gorbachev and L. L. Firsov, ‘‘New statement of the elasticity problem for a layer,’’ Mech. Solids 46, 89–95 (2011).
A. F. Arkhangelskii and V. I. Gorbachev, ‘‘Effective characteristics of corrugated plates,’’ Mech. Solids 42, 447–462 (2007).
V. I. Gorbachev and L. A. Kabanova, ‘‘Formulation of problems in the general Kirchhoff–Love theory of inhomogeneous anisotropic plates,’’ Mosc. Univ. Mech. Bull. 73 (3), 60–66 (2018).
V. I. Gorbachev, ‘‘The engineering theory of the deforming of the nonuniform plates from composite materials,’’ Mekh. Kompos. Mater. Konstruk. 22, 585–601 (2016).
I. N. Vekua, General Methods of Constructing Different Versions of Shell Theory (Nauka, Moscow, 1982) [in Russian].
N. A. Kil’chevskii, Fundamentals of the Analytical Mechanics of Shells (Akad. Nauk UkrSSR, Kiev, 1963) [in Russian].
L. A. Agolovyari, Asymptotic Theory of Anisotropic Plates and Shells (Nauka, Moscow, 1997) [in Russian].
I. I. Vorovich, ‘‘Some results and problems of asymptotic theory of plates and shells,’’ in Proceedings of the 1st All-Union School on Theory and Numerical Methods for Shells and Plates, Gegechkori, Georgia, October 1–10, 1974 (Tbilisi Univ., Tbilisi, 1975), pp. 51–149.
A. L. Goldenveiser, Theory of Elastic Thin Shells (Nauka, Moscow, 1976; Pergamon, Oxford, 1961).
S. A. Ambartsumyan, General Theory of Anisotropic Shells (Nauka, Moscow, 1974) [in Russian].
X. He et al., ‘‘Application of the Kirchhoff hypothesis to bending thin plates with different moduli in tension and compression,’’ J. Mech. Mater. Struct. 5, 755–769 (2010).
V. I. Andreev, B. M. Yazyev, and A. S. Chepurnenko, ‘‘On the bending of a thin plate at nonlinear creep,’’ Adv. Mater. Res. 900, 707–710 (2014).
A. Constantinescu, ‘‘On the identification of elastic moduli in plates,’’ in Inverse Problems in Engineering Mechanics, Ed. by M. Tanaka and G. S. Dulikravich (Elsevier Science, Amsterdam, 1998), pp. 205–214.
H. Altenbach and V. Eremeyev, ‘‘Analysis of the viscoelastic behavior of plates made of functionally graded materials,’’ Z. Angew. Math. Mech. 88, 332–341 (2008).
S. W. White, S. K. Kim, A. K. Bajaj, et al., ‘‘Experimental techniques and identification of nonlinear and viscoelastic properties of flexible polyurethane foam,’’ Nonlin. Dyn. 22, 281–313 (2000).
M. Sellier, C. E. Hann, and N. Siedow, ‘‘Identification of relaxation functions in glass by mean of a simple experiment,’’ J. Am. Ceram. Soc. 90, 2980–2983 (2007).
R. Lakes, Viscoelastic Materials (Cambridge Univ. Press, Cambridge, 2009)
R. A. Kayumov, S. A. Lukankin, V. N. Paimushin, and S. A. Kholmogorov, ‘‘Identification of mechanical properties of fiber-reinforced composites,’’ Uch. Zap. Kazan. Univ., Ser. Fiz.-Mat. Nauki 157 (4), 112–132 (2015).
A. A. Il’yushin and B. E. Pobedrya, Fundamentals of the Mathematical Theory of Thermal Viscoelasticity (Nauka, Moscow, 1970) [in Russian].
V. V. Alexandrov, V. G. Boltianskii, S. S. Lemak, N. A. Parusnikov, and V. M. Tikhomirov, Optimal Motion Control (Fizmatlit, Moscow, 2005) [in Russian].
I. Markovsky and S. Van Huffel, ‘‘Overview of total least squares methods,’’ Signal Process. 87, 2283–2302 (2007).
C. L. Lawson and R. J. Hanson, Solving Least Squares Problems, Classics in Applied Mathematics (Soc. Ind. Appl. Math., Philadelphia, 1995).
G. H. Golub and Ch. F. Van Loan, Matrix Computations (John Hopkins Univ. Press, Baltimore, 1996).
M. E. Wall, A. Rechtsteiner, and L. M. Rocha, ‘‘Singular value decomposition and principal component analysis,’’ in A Practical Approach to Microarray Data Analysis, Ed. by D. P. Berrar, W. Dubitzky, and M. Granzow (Springer, Boston, MA, 2003).
P. S. Shcherbakov, ‘‘Use of prior data in updating the parameter estimates,’’ Autom. Remote Control 49, 613–620 (1988).
Author information
Authors and Affiliations
Corresponding author
Additional information
(Submitted by A. V. Lapin)
Rights and permissions
About this article

Cite this article
Kabanova, L.A. An Approach to Experimental Computation of an Anisotropic Viscoelastic Plate Stiffnesses. Lobachevskii J Math 41, 2010–2017 (2020). https://doi.org/10.1134/S1995080220100091
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S1995080220100091