
Abstract
We obtained the exact solution of the Euler–Lagrange equations following from the Chern–Simons action for \(\mathbb{S}\mathbb{O}(3)\) connection with δ-type source. This solution is proved to describe straight linear disclination in the framework of geometric theory of defects. Torsion tensor components are calculated assuming the metric to be Euclidean. It shows that disclination can be followed by continuous distribution of dislocations with cylindrical symmetry.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 INTRODUCTION
One of the most promising approach for description of defects in solids and space-time is based on Riemann–Cartan geometry with nontrivial curvature and torsion (see. [1, 2]). In this approach a crystal is considered as a manifold (continuous media) equipped with a unit vector field. If dislocations are absent, then the displacement vector field corresponding to diffeomorphisms of the Euclidean space exists. If the displacement vector field has discontinuities, then we say that the media contains defects called dislocations. This results in nontrivial geometry. Namely, dislocations correspond to nontrivial torsion which has physical meaning of surface density of the Burgers vector. Defects (discontinuities) of unit vector field are called disclinations. They produce nontrivial curvature for \(\mathbb{S}\mathbb{O}(3)\) connection and have physical meaning of surface density of the Frank vector.
The advantage of the geometric theory of defects comprises description of single defects as well as their continuous distribution.
In the present paper, we consider three dimensional Chern–Simons action for \(\mathbb{S}\mathbb{O}(3)\) connection in the framework of geometric theory of defects. This action for defects was first used in [3]. In Section 2, we introduce notation and write dawn the action for \(\mathbb{S}\mathbb{O}(3)\) connection. The exact solution of equilibrium equations for one straight linear disclination is obtained in the next section. The angle rotation field is also found in this case. In Section 4 torsion components are calculated under the assumption that metric is Euclidean.
2 CHERN–SIMONS ACTION
Let us consider a three dimensional manifold \(\mathbb{M}\) with coordinates \({{x}^{\mu }},\)\(\mu = 1,2,3.\) Assume that the Riemann–Cartan geometry is defined on \(\mathbb{M},\) i.e., Riemannian metric \({{g}_{{\mu \nu }}}\) and torsion \(T_{{\mu \nu }}^{\rho }\) are given. We shall use the Cartan variables: vielbein \(e_{\mu }^{i}\) and \(\mathbb{S}\mathbb{O}(3)\) connection \(\omega _{\mu }^{{ij}} = - \omega _{\mu }^{{ji}},\)\(i,j = 1,2,3.\) Each vielbein uniquely defines the Riemannian metric on \(\mathbb{M}\,: \)
Raising and lowering of Greek and Latin indices is performed by using metrics \({{g}_{{\mu \nu }}}\) and \({{\delta }_{{ij}}},\) and transformation of Greek indices into Latin ones and vice versa is performed with the help of vielbein \(e_{\mu }^{i}\) and its inverse \(e_{i}^{\mu }.\)
In the case under consideration, there are two 1‑forms which are given on \(\mathbb{M}\,:\)
They define local 2-forms of curvature and torsion:
which satisfy the Bianchi identities:
Note that the last expression does not depend on vielbein.
The Chern–Simons action for the \(\mathbb{S}\mathbb{O}(3)\) connection has the form [4] (see review [5])
where we used expression (2) for the curvature 2-form.
The existence of third rank totally antisymmetric tensor allows one to introduce the following parametrization of the \(\mathbb{S}\mathbb{O}(3)\) connection:
where \({{\varepsilon }^{{kij}}}\) is the totally antisymmetric third rank tensor. We attract attention that under space reflections \({{x}^{1}} \mapsto - {{x}^{1}}\) the 1-form \({{\omega }_{{\mu k}}}\) changes sign because so does the totally antisymmetric tensor. In this parametrization, components of curvature and torsion are
3 LINEAR DISCLINATIONS
We assume that matric on the manifold \(\mathbb{M}\) is Euclidean, \({{g}_{{\mu \nu }}} = {\text{diag}}( + + + ).\) Then geometry is described only by the \(\mathbb{S}\mathbb{O}(3)\) connection which may result in nontrivial curvature and torsion. Consider the Chern–Simons action for the \(\mathbb{S}\mathbb{O}(3)\) connection (5) with the source term:
where \({{J}_{i}} = \tfrac{1}{2}d{{x}^{\mu }} \wedge d{{x}^{\nu }}{{J}_{{\mu \nu i}}}\) is the 2 form corresponding to the source of disclinations which is not yet specified. The interaction term is similar to that of minimal coupling of electric charge to electromagnetic field in electrodynamics.
Equilibrium equations for action (8) take the form
where \(J_{{\mu \nu }}^{k}\) are components of the source for the \(\mathbb{S}\mathbb{O}(3)\) connection. It implies flat manifold \(\mathbb{M}\) in the absence of sources.
The first two terms in action (8) change by external differential under local \(\mathbb{S}\mathbb{O}(3)\) rotations. Therefore it is necessary to impose the condition \(D{{J}^{k}} = 0,\) where \(D{{J}^{k}}\,\,: = d{{J}^{k}} + {{J}^{j}} \wedge \omega _{j}^{k},\) for the selfconsistency of the Euler–Lagrange equations.
Consider one linear disclination \({{q}^{\mu }}(t),\) where \(t \in \mathbb{R}\) is a parameter along the disclination line. We write the interaction term in the form
where \({{\dot {q}}^{\mu }}\,\,: = {{d{{q}^{\mu }}} \mathord{\left/ {\vphantom {{d{{q}^{\mu }}} {dt}}} \right. \kern-0em} {dt}}.\) This action is invariant with respect to coordinate changes on \(\mathbb{M}\) (up to boundary terms) and arbitrary reparameterization of the curve \({{q}^{\mu }}(t).\) Suppose that disclination is such that the condition \({{\dot {q}}^{3}} \ne 0\) is valid everywhere. To vary this action with respect to the \(\mathbb{S}\mathbb{O}(3)\) connection, we insert the three dimensional δ-function in the integrand:
where integration over t is taken using one δ-function \(\delta ({{x}^{3}} - {{q}^{3}}(t))\) and \({{\delta }^{2}}(x - q)\,:\,\,\) = \(\delta ({{x}^{1}} - {{q}^{1}})\delta ({{x}^{2}} - {{q}^{2}})\) denotes two dimensional δ-function on the \({{x}^{1}},{{x}^{2}}\) plane. Then the variation of the source term is
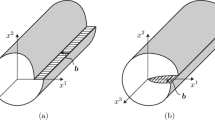
Consider equations (9) on topologically trivial manifold \(\mathbb{M} \approx {{\mathbb{R}}^{3}}\) with Cartesian coordinates \({{x}^{1}} = x,\)\({{x}^{2}} = y,\) and \({{x}^{3}}.\) We assume that disclination is straight and coincide with the \({{x}^{3}}\) axis, that is \({{q}^{1}} = {{q}^{2}} = 0\) and \({{q}^{3}} = t.\) We look for solutions of equations (9) which are invariant with respect to translations along \({{x}^{3}}\) axis and rotations in the \(x,y\) plane. In this case, the \(\mathbb{S}\mathbb{O}(3)\) connection has only two nontrivial components:
which depend on a point on the plane \((x,y) \in {{\mathbb{R}}^{2}} = \mathbb{C}.\) To find a solution we introduce complex coordinate
Then two real components of \(\mathbb{S}\mathbb{O}(3)\) connection (12) are united into the complex one:
Corresponding curvature tensor has only one linearly independent complex component
which is linear in connection. This is the consequence of abelian nature of the rotational group \(\mathbb{S}\mathbb{O}(2)\) acting on the \(x,y\) plane. The complex conjugate component is
If only two components of the \(\mathbb{S}\mathbb{O}(3)\) connection (12) differ from zero, the quadratic terms in curvature (2) identically vanish, and we can consider δ-function sources because equilibrium equations (9) become linear. Now we fix the source:
where \(\delta (z)\) is the two dimensional δ-function on the complex plane. It is clear that this source respect the rotational symmetry.
Solution of equation (16) describes new type of geometric singularity. If this equation were considered as second order equation for metric then its solution would describe the usual conical singularity on the \(x,y\) plane. In this case, the solution corresponds to the wedge dislocation in the geometric theory of defects [1]. Now the situation is different. We consider this equation as the first order equation for the \(\mathbb{S}\mathbb{O}(3)\) connection and show that it describes defect of the unit vector field which is called disclination, the metric being Euclidean.
Equation (16) has a solution
To check that it is really a solution, one can use the well known formulae (see e.g., [6]):
The corresponding real components take the form
This solution was found in [7].
The curvature is flat outside the \({{x}^{3}}\) axis, and the connection is given by partial derivative of some function. In the geometric theory of defects, this function is the rotational angle field \(\theta (x,y)\) of the unit vector field on the plane. This field must satisfy the following system of equations:
The integrability conditions for this system of equation outside the disclination axis are satisfied,
and we can easily write down a general solution
We fix the integration constant \(C\,: = \pi A.\) Then the solution takes the form
where \(\varphi \) is the usual polar angle on the plane \((x,y) \in {{\mathbb{R}}^{2}}.\) If one goes around the \({{x}^{3}}\) axis along a contour C, the polar angle changes by \(2\pi .\) We have to impose the quantization condition
in order that the rotational field \(\theta (x,y)\) be defined.
Thus, the rotational field takes the form
It is defined everywhere except a cut along a half plane, say, \(y = 0,\)\(x \geqslant 0.\) The corresponding \(\mathbb{S}\mathbb{O}(3)\) connection has only two nontrivial components:
where \(r\,:\, = \sqrt {{{x}^{2}} + {{y}^{2}}} \) is the polar radius. It is defined everywhere on the plane \(x,y\) except the origin where its rotor has δ-type singularity (16). We see that the \(\mathbb{S}\mathbb{O}(3)\) connection behavior is much better then the corresponding rotational angle field as it should be in the geometric theory of defects.
Thus, the rotational angle field varies from 0 to \(2\pi n,\) where \(\left| {2\pi n} \right| = \left| \Omega \right|\) is the modulus of the Frank vector, when one goes along contour C enclosing the \({{x}^{3}}\) axis. This is exactly the linear disclination of the unit vector field, its axis coinciding with the \({{x}^{3}}\) axis. For \(n = 0\) disclination is absent. This case requires separate consideration: for \(A = 0,\)equation (21) implies \(\theta = 0.\)
We see that nontrivial \(\mathbb{S}\mathbb{O}(3)\) connection (25) describes defects of the unit vector field called disclinations. The curvature tensor is nontrivial in this case: it vanishes everywhere except the disclination line on which it has δ-type singularity (16).
4 DISLOCATIONS
The existence of disclination can be followed by appearance of dislocations: this depends on the torsion tensor. We consider the case when Euclidean metric and \(\mathbb{S}\mathbb{O}(3)\) connection (25) describing straight disclination are given on the manifold \(\mathbb{M}.\)
Torsion tensor components in the complex basis for \(\mathbb{S}\mathbb{O}(3)\) connection (25) are
and \(T_{{\bar {z}z}}^{i} = \overline {T_{{z\bar {z}}}^{i}} .\) The remaining components \(T_{{z3}}^{i}\) and \(T_{{\bar {z}3}}^{i}\) vanish in this case.
Suppose that diagonal vielbein corresponds to the Euclidean metric (we write down only components in the \(x,y\) plane):
The components in the complex basis are
Substitution of explicit expressions for the vielbein and \(\mathbb{S}\mathbb{O}(3)\) connection in formulae for torsion tensor components (26) yields the following result
In the geometric theory of defects, the torsion tensor defines the surface density of the Burgers vector. Going back to the real basis, we obtain the expression for the surface density of the Burgers vector:
where \(r\,: = \sqrt {{{x}^{2}} + {{y}^{2}}} .\) It means that the disclination can be followed by distribution of dislocations. This distribution is continuous in the \(x,y\) plane and has singularity on the disclination line (\({{x}^{3}}\) axis). The Burgers vector is lying in the \(x,y\) plane, its density being rotationally symmetric and invariant with respect to translations along \({{x}^{3}}\) axis. For \(r \to \infty \) the density of the Burgers vector tends to zero.
5 CONCLUSIONS
In this paper, we showed that the Chern–Simons action describes linear disclinations in the geometric theory of defects. It leads to nontrivial \(\mathbb{S}\mathbb{O}(3)\) connection in the considered case. The corresponding curvature tensor has δ-type singularity along the disclination axis. As far as the author knows, this singularity was not known earlier in the literature. This is not a conical singularity on the \(x,y\) plane because the metric is Euclidean, but the singularity in the \(\mathbb{S}\mathbb{O}(3)\) connection. Components of torsion tensor are also nontrivial. As the consequence, the linear disclination is followed by continuous distribution of dislocations. The distribution of dislocations is also invariant with respect to rotations in the x, y plane and translations along the disclination axis.
Methods and approaches used in the paper are considered, for example, in [8–13]. Еhe obtained solution of string type can be important in gravity and cosmology (see, e.g., [14–16]).
REFERENCES
M. O. Katanaev and I. V. Volovich, “Theory of defects in solids and three-dimensional gravity,” Ann. Phys. 216, 1–28 (1992).
M. O. Katanaev, “Geometric theory of defects,” Phys.-Usp. 48, 675–701 (2005); https://arxiv.org/abs/cond-mat/0407469.
T. Dereli and A. Verçin, “A gauge model of amorphous solids containing defects. II. Chern–Simons free energy,” Philos. Mag. B 64, 509–513 (1991).
S. S. Chern and J. Simons, “Characteristic forms and geometric invariants,” Ann. Math. 99, 48–69 (1974).
J. Zanelli, “Uses of Chern–Simons actions,” AIP Conf. Proc. 1031, 115 (2008).
V. S. Vladimirov, Equations of Mathematical Physics (Marcel Dekker, New York, 1971).
M. O. Katanaev, “Chern–Simons term in the geometric theory of defects,” Phys. Rev. D 96, 84054 (2017); https://doi.org/10.1103/PhysRevD.96.084054; https://arxiv.org/abs/1705.07888[gr-qc].
G. A. Alekseev, “Collision of strong gravitational and electromagnetic waves in the expanding universe,” Phys. Rev. D 93, 061501 (2016).
A. K. Gushchin, “Solvability of the Dirichlet problem for an inhomogeneous second-order elliptic equation,” Sb. Math. 206, 1410–1439 (2015).
A. K. Gushchin, “lp-estimates for the nontangential maximal function of the solution to a second-order elliptic equation,” Sb. Math. 207, 1384–1409 (2016).
V. V. Zharinov, “Conservation laws, differential identities, and constraints of partial differential equations,” Theor. Math. Phys. 185, 1557–1581 (2015).
V. V. Zharinov, “Bäcklund transformations,” Theor. Math. Phys. 189, 1681–1692 (2016).
Yu. N. Drozhzhinov, “Multidimensional Tauberian theorems for generalized functions,” Russ. Math. Surv. 71, 1081–1134 (2016).
M. O. Katanaev, “On homogeneous and isotropic universe,” Mod. Phys. Lett. A 30, 1550186 (2015); arXiv:1511.00991[gr-qc]; doi 10.1142/S021773231550186 210.1142/S0217732315501862
M. O. Katanaev, “Lorentz invariant vacuum solutions in general relativity,” Proc. Steklov Inst. Math. 290, 138–142 (2015); arXiv:1602.06331; doi 10.1134/S0081543815060 12710.1134/S0081543815060127
M. O. Katanaev, “Killing vector fields and a homogeneous isotropic universe,” Phys.-Usp. 59, 689–700 (2016); arXiv:1610.05628 [gr-qc]; doi 10.3367/UFNe. 2016.05.03780810.3367/UFNe.2016.05.037808
ACKNOWLEDGMENTS
The author is grateful to the Centro de Estudios Cientificos, Valdivia, Chile for hospitality and J. Zanelli for collaboration. This work is supported by the Russian Science Foundation under grant 14-50-00005.
Author information
Authors and Affiliations
Corresponding author
Additional information
1The article is published in the original.
Rights and permissions
About this article

Cite this article
Katanaev, M.O. Description of Disclinations and Dislocations by the Chern–Simons Action for \(\mathbb{S}\mathbb{O}(3)\) Connection. Phys. Part. Nuclei 49, 890–893 (2018). https://doi.org/10.1134/S1063779618050234
Published:
Issue Date:
DOI: https://doi.org/10.1134/S1063779618050234