
Abstract
We study transverse vibrations of an inhomogeneous circular thin plate in this work. Using the perturbation method, asymptotic formulas are obtained for free-vibration frequencies of a plate whose thickness and Young’s modulus linearly depend on radius. The effect of the boundary conditions on frequencies and the behavior of frequencies for a plate with the fixed mass are analyzed. For lower frequencies of the plate, the asymptotic results are compared with the results of analysis by finite elements.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1. INTRODUCTION
The structure of the spectrum of free transverse vibrations of circular thin plates under different boundary conditions has been well-studied. This is due, firstly, to the frequent use of such building blocks in engineering structures and, secondly, to the simplicity of the geometry, which makes it possible in some cases to obtain an analytical solution. The list of works on this topic is extensive; a systematized review of the results of the research is presented in [1]. The number of works devoted to vibrations of inhomogeneous circular plates (in particular, plates of variable thickness and stiffness) is also quite large. Numerical methods make it possible to find values of frequencies and forms of free vibrations for a thin plate of any geometry. In particular, to solve such problems, researchers use the Rayleigh–Ritz method [2–4], the differential quadrature method [5], and the Frobenius method (infinite power series) [6, 7]. The analysis is most often conducted for plates whose parameters depend only on the radial coordinate. A series of works consider vibrations of plates with various forms of inhomogeneity in thickness: linear [2, 6], quadratic [2, 3], polynomic [4, 7], stepwise [8], exponential [9], and a plate with a central hole [10, 11]. Fewer works are related to vibrations of plates with variable Young’s modulus [12]. The purpose of our study is to obtain asymptotic formulas that describe the effect of inhomogeneity of the parameters of a thin plate (thickness or stiffness) on its natural frequencies. The algorithm for the derivation of such formulas is described, e.g., in [13]. It is assumed in this study that a plate’s parameters (geometric and physical) are smooth functions of coordinates. The asymptotic approach in the study of vibrations of plates with inhomogeneity in the form of holes is used in [10, 11].

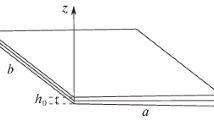
Circular plate of variable thickness and plate’s cross-section.
2. VIBRATION EQUATIONS OF A CIRCULAR THIN PLATE WITH VARIABLE PARAMETERS
Consider free transverse vibrations of a circular thin plate with nonconstant Young’s modulus E and thickness h. The rest of the parameters of the plate (density of the material ρ and the Poisson coefficient ν) are considered to be constant. The effect of the Poisson coefficient on the fundamental frequency is investigated in [14].
In the plate model that uses the Kirchhoff–Love hypotheses, transverse-vibration equations are presented as [1]
where D(x1, x2) = \(\frac{{E({{x}_{1}},{{x}_{2}}){{h}^{3}}({{x}_{1}},{{x}_{2}})}}{{12(1 - {{\nu }^{2}})}}\) is stiffness of the plate, E(x1, x2) is Young’s modulus, h(x1, x2) is thickness of the plate, and w(x1, x2, t) is the deflection. We separate the variables in Eq. (1) by the formula
(where ω is free vibration frequency), take the polar system of coordinates x1 = rcosφ and x2 = rsinφ, and obtain the vibration equation of a circular plate with nonconstant parameters
whose coefficients are
Consider the case where parameters of the plate depend only on its radius. After separating the spatial variables
(where m is the number of waves in the circumferential direction), Eq. (2) takes the form
Coefficients of the linear differential operator L are
For the particular case of axisymmetric vibrations (m = 0), Eq. (3) is presented as
Here and then, index m is omitted: w(r) = wm(r). Such an equation is considered in [5]. For convenience, we pass in Eqs. (3) and (5) to dimensionless variables with the ~ sign, which later is omitted:
Here, λ is the dimensionless natural frequency. Equation (3) takes the form
where coefficients of the operator L are determined by formulas (4). For the plate with constant parameters, D(r) = 1 and h(r) = 1.
3. THE PERTURBATION METHOD
To investigate variation frequencies of a circular plate with stiffness and thickness parameters that are close to constants, we use the perturbation method. Suppose
After substitution (6) in Eq. (5) and equating coefficients at identical degrees of ε, we obtain the series of boundary problems
Here, Δ is a Laplacian. The existence condition for a solution of the system is the orthogonality of the right sides of the equations to the solution w0(r) [2]. For example,
from where we determine the value of λ1, which is the first correction to frequency. The explicit form of the operators Fij is presented below.
4. NATURAL VIBRATION FREQUENCIES OF A CIRCULAR PLATE OF VARIABLE THICKNESS
Consider a circular plate of variable thickness; here, we assume that Young’s modulus is constant, namely, E(r) = 1. Suppose the dependence of thickness of the plate on its radius is linear and close to constant; assume that
where h0 is unperturbed thickness and ε is a small parameter. When choosing a, consider two cases: 1) the thickness changes according to the formula h(r) = h0(1 + εr) (h(0) = h0 and a = 0) and 2) the thickness change is assigned in such a way that the volume and therefore the mass of the plate are retained. In the second case, the parameter a is found from the condition
Consider two kinds of boundary conditions, namely, a built-in edge and a simply supported edge. In the first case, the boundary conditions are presented as
in the second case,
where M(r) is a transverse moment. Write the general solution of the zero-approximation equation
where Jm(r), Im(r), Ym(r), and Km(r) are the Bessel functions and the modified Bessel functions of the first and second kind, while C1, C2, C3, and C4 are constants determined from the boundary conditions. Since the functions Y(r) and K(r) are singular at zero, it is necessary to put C3 = C4 = 0. For clamped conditions, the unperturbed frequency λ0 is found from the equation [2]
while for the simply supported edge conditions,
The forms of vibrations in both cases are
Using frequency Eqs. (8) and (9), we determine the two-parametric families of frequencies \(\lambda _{0}^{{m,n}}\), where n is the number of waves in the radial direction. The operators F11 and F12 in (7) are given by the formulas
where
From which we obtain the formula for the first correction to frequency
The integrals I11 and I12 can be determined analytically, but the formulas for determining λ1 are cumbersome. In turn, the numerical determination of corrections using the Maple 2015 package according to these formulas is not very difficult. Table 1 shows the lower frequencies \(\lambda _{0}^{{0,n}}\) and the first corrections to them that are calculated at ν = 0.3 for a plate with the clamped edge.
Figure 2a shows the dependence on the parameter ε of lower frequencies of transverse vibrations of the clamped plate whose thickness varies according to the formula h(r) = h0(1 + εr). Here and then, a solid line corresponds to frequencies calculated by asymptotic formula (6) and a point line, to numerical values of frequencies obtained using the COMSOL Multiphysics 5.4 package. As a plate’s thickness increases, its stiffness and mass increase, but the effect of stiffness depending on cube of thickness is more significant (this explains the monotonous increase in frequency with the growth of ε). For small ε, asymptotic values are close to accurate values. The decrease in frequency with a significant edgewise decrease in plate’s thickness is noticeably faster than the decrease in frequency according to the linear dependence.

Lower frequencies of transverse vibrations of (a) clamped plate with thickness h(r) = h0(1 + εr) and (b) simply supported plate with thickness h(r) = h0(1 + ε(r – 2/3)).
Consider the case where the mass of a plate does not change with a linear change in its thickness. Figure 2b shows the dependence on the parameter ε, of lower frequencies of transverse vibrations of the simply supported plate whose thickness varies according to the formula h(r) = h0(1 + ε(r – 2/3)). When retaining the mass of the plate, lower frequencies poorly depend on a change in thickness. Under various boundary conditions, the difference in the nature of the dependencies of lower frequencies on the parameter ε is small; however, the fundamental frequency decreases with a growth of ε for a simply supported edge of the plate and increases for a rigid restraint. With a growth of the wave numbers m and n, the dependence of frequencies on the change in thickness increases (being close to linear) and the sequence order of the frequencies is disturbed, e.g., the sequence of frequencies λ2, 1 < λ0, 2 < λ5, 0 for ε = 0 goes to λ5, 0 < λ2, 1 < λ0, 2 for ε = –0.6.
5. NATURAL VIBRATION FREQUENCIES OF A CIRCULAR PLATE WITH VARIABLE YOUNG’S MODULUS
Consider a circular plate of constant thickness h(r) = 1. We assume that the dependence of Young’s modulus of the plate’s material, on radius is linear (close to constant); suppose
where E0 is the unperturbed Young’s modulus and ε is a small parameter. When choosing a, we consider two cases: 1) E(r) = E0(1 + εr) (a = 0) and 2) the change of Young’s modulus in such a way that its average value retains (under this condition, a = 2/3). Then, the operators F11 and F12 in (7) are assigned by the formulas
where
Figure 3a shows the dependence on the parameter ε of lower frequencies of transverse vibrations of the simply supported plate whose Young’s modulus varies according to the formula E(r) = E0(1 + εr). With a monotonous growth of Young’s module, frequencies are predictably increased. With a significant reduction of ε, frequencies’ descending is sharply accelerated (due to the low bending stiffness of the plate). Choosing boundary conditions has a weak impact on the behavior of frequencies when ε is changed.

Lower frequencies of transverse vibrations of (a) simply supported plate with Young’s modulus E(r) = E0(1 + εr) and (b) clamped plate with E(r) = E0(1 + ε(r – 2/3)).
Finally, consider vibrations of the plate that retains the average value of Young’s modulus (a = 2/3); see Fig. 3b. Also in the case where the average value of Young’s modulus is retained, the nature of the curves’ behavior poorly depends on boundary conditions. The dependence of frequencies on ε is close to linear, even for perturbation-parameter values that are close to unity in magnitude; here, lower frequencies are almost constant. For the frequencies λm, 0, the first correction λ1 grows with the growth of m; for the rest of the frequencies, λ1 < 0 and the correction decreases with the growth of wave numbers.
CONCLUSIONS
Using the asymptotic formulas obtained in this work, it is possible to find good approximations for the natural vibration frequencies of plates in the case of a relatively small linear change in the thickness parameters and Young’s modulus. Here, when creating a structure, it is possible to estimate the change in lower frequencies with a small variation of the geometry or properties of the plate material and the conservation of the mass of the plate. It is of interest to study spectrum properties for a small nonlinear change in parameters (e.g., quadratic or exponential) that is encountered in applications.
REFERENCES
A. W. Leissa, Vibration of Plates (US Government Printing Office, Washington, DC, 1969).
B. Singh and S. Chakraverty, “Use of characteristic orthogonal polynomials in two dimensions for transverse vibration of elliptic and circular plates with variable thickness,” J. Sound Vib. 173, 289–299 (1994). https://doi.org/10.1006/jsvi.1994.1231
B. Singh and V. Saxena, “Transverse vibration of a circular plate with unidirectional quadratic thickness variation,” Int. J. Mech. Sci. 38, 423–430 (1996). https://doi.org/10.1016/0020-7403(95)00061-5
B. Singh and S. M. Hassan, “Transverse vibrations of a circular plate with arbitrary thickness variation,” Int. J. Mech. Sci. 40, 1089–1104 (1998).
X. Wang, J. Yang, and J. Xiao, “On free vibration analysis of circular annular plates with non-uniform thickness by the differential quadrature method,” J. Sound Vib. 184, 547–551 (1995).
C. Prasad, R. K. Jain, and S. R. Soni, “Axisymmetric vibrations of circular plates of linearly varying thickness,” Z. Angew. Math. Phys. 23, 941–948 (1972).
M. Eisenberger and M. Jabareen, “Axisymmetric vibrations of circular and annular plates with variable thickness,” Int. J. Struct. Stab. Dyn. 1, 195–206 (2001). https://doi.org/10.1142/S0219455401000196
A. Salmane and A. A. Lakis, “Natural frequencies of transverse vibrations of non-uniform circular and annular plates,” J. Sound Vib. 220, 225–249 (1999).
B. Singh and V. Saxena, “Axisymmetric vibration of a circular plate with exponential thickness variation,” J. Sound Vib. 196, 35–42 (1996).
A. L. Smirnov, “Free vibrations of annular circular and elliptic plates,” in Proc. 7th Int. Conf. on Comp. Methods in Structural Dynamics and Earthquake Engineering (COMPDYN 2019), Crete, Greece, June 24–26,2019 (COMPDYN, 2019), Vol. 2, pp. 3547–3555.
A. Smirnov and A. Lebedev, “Free vibrations of perforated thin plates,” in Proc. Int. Conf. on Numerical Analysis and Applied Mathematics, Rhodes, Greece, Sept. 22–28,2014 (American Institute of Physics, Melville, NY, 2014), in Ser.: AIP Conference Proceedings, Vol. 1648, paper No. 300009. https://doi.org/10.1063/1.4912551
T. A. Anikina, A. O. Vatulyan, and P. S. Uglich, “On the calculation of variable stiffness for a circular plate,” Vychisl. Tekhnol. 17 (6), 26–35 (2012).
S. M. Bauer, S. B. Filippov, A. L. Smirnov, P. E. Tovstik, and R. Vaillancourt, Asymptotic Methods in Mechanics of Solids (Birkhäuser, Basel, 2015).
P. A. A. Laura, V. Sonzogni, and E. Romanelli, “Effect of Poisson’s ratio on the fundamental frequency of transverse vibration and buckling load of circular plates with variable profile,” Appl. Acoust. 47, 263–273 (1996). https://doi.org/10.1016/0003-682X(95)00053-C
Funding
This work was financially supported in part by the Russian Foundation for Basic Research (grant nos. 18-01-00832-a and 19-01-00208-a).
Author information
Authors and Affiliations
Corresponding authors
Additional information
Translated by L. Kartvelishvili
About this article

Cite this article
Vasiliev, G.P., Smirnov, A.L. Free Vibration Frequencies of a Circular Thin Plate with Variable Parameters. Vestnik St.Petersb. Univ.Math. 53, 351–357 (2020). https://doi.org/10.1134/S1063454120030140
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S1063454120030140