
Abstract
Chaotic signals and systems are widely used in image encryption, secure communications, weak signal detection, and radar systems. Many researchers have focused in recent years on the development of systems with an infinite number of coexisting chaotic attractors. We propose some approaches in this work to the generation of self-reproducing systems with an infinite number of coexisting self-excited or hidden chaotic attractors with the same Lyapunov exponents based on mathematical models of Lurie systems. The proposed approach makes it possible to generate extremely multistable systems using numerous known examples of the existence of chaotic attractors in Lurie systems without resorting to an exhaustive computer search. We illustrate the proposed methods by constructing extremely multistable systems with 1-D and 2-D grids of hidden chaotic attractors using the generalized Chua system, in which hidden attractors were first discovered by G.A. Leonov and N.V. Kuznetsov.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
INTRODUCTION
Chaotic systems are widespread in nature and technology. After the problems of synchronizing oscillations of chaotic systems, many researchers focused on the problems of using chaos in engineering applications. Chaotic signals and systems are widely used currently in image encryption [1–3], secure communications [4], weak signal detection [5], and radar systems [6]. The more complex the structure of a chaotic system, the more opportunities it provides for potential applications.
G.A. Leonov proposed a new method in 2010 for finding periodic solutions of multidimensional dynamical Lurie systems [7]. The proposed method was further developed in the works of Leonov and his disciples, which made it possible to efficiently construct counterexamples to the well-known hypotheses of Aizerman and Kalman, as well as detecting hidden chaotic oscillations in the classical and generalized Chua systems for the first time [8, 9]. The results obtained in the mentioned works inspired many scientists to seek and develop dynamical systems with hidden chaotic attractors [10–12].
There have been many works in recent years on constructing extremely multistable dynamical systems with an infinite number of coexisting chaotic attractors, both self-excited and hidden [13–15]. All the mentioned articles are based on the idea proposed in [13] for introducing periodic functions into variable-boostable systems. Let us cite here the definition of such systems given in [16].
Definition. The dynamical system \(\dot {X}\) = F(X) (X = (x1, x2, …, xn)) will be called variable-boostable if there is a transformation of variables yk = xk – ck that leads the system to the form \(\dot {Y}\) = F(Y) + D (Y = (y1, y2, …, yn), C = (c1, c2, …, cn), (D = (d1, d2, …, dn)). Here, for k ∈ i1, i2, …, im (1 ≤ i1 < i2 < … < im ≤ n), the constants ck ≠ 0 and ck = 0 for k ∈ {1, 2, …, n}\{i1, i2, …, im}.
Variable-boostable systems include in particular multidimensional cascade systems
Variables y, z, …, u in system (1) can be boosted by introducing additional constants in its first n – 1 equations. In fact, by substituting x → \(\tilde {x}\), y → \(\tilde {y}\) + m, z → \(\tilde {z}\) + n, …, u → \(\tilde {u}\) + p, we arrive at the following system
It is easy to see that the system transformation displaces the phase flow of system (1) with respect to the variables y, z, …, u and leaves the dynamics of the variable \(\tilde {x}\) = x unchanged. The main idea of constructing systems with an infinite (n – 1)-D grid of identical attractors proposed in [13] consists in replacing the variables y, z, …, u in system (1) with periodic functions of these variables. If the new system has a chaotic attractor after such a replacement, then it has an infinite (n – 1)-D grid of identical attractors [13]. For noncascade systems, the procedure for introducing periodic functions, which makes it possible to construct a system with a multidimensional grid of attractors, is much more complicated, because such a procedure can significantly change the dynamics of the system and lead to the destruction of its attractors.
We propose methods in this article for constructing systems with an infinite grid of attractors (both self-excited and hidden [8]) based on mathematical models of Lurie systems. The proposed methods make it possible to use many well-known results related to the existence of chaotic attractors for Lurie systems to generate extremely multistable systems with an infinite grid of identical attractors.
Section 2 proposes a method for constructing a 1-D grid of attractors by periodizing the nonlinearity of the Lurie system with a degenerate matrix of the linear part. The results of Section 3 are based on the fact of the existence of a nonsingular linear transformation that reduces the Lurie system with a nondegenerate transfer function to a cascade system. The latter makes it possible to construct systems with a multidimensional grid of identical attractors.
1 CONSTRUCTION OF 1-D GRID OF ATTRACTORS BASED ON LURIE SYSTEMS
Consider the following Lurie system
where A is the constant (n × n)-matrix, b and c are constant n-vectors, and g(σ) is the continuous piecewise differentiable scalar function. Let I be the identity (n × n)-matrix. For system (2), we define the fractional rational function χ(p) = cT(A – pI)–1b. Let χ(p) = m(p)[n(p)]–1. The polynomial in the denominator of the fraction χ(p) has degree n and cannot be reduced with its numerator. In this case, it is said [17] that the transfer function χ(p) is nondegenerate.
Assume that χ(0) ≠ 0, the matrix A – χ(0)–1bcT has zero eigenvalue, the function g(σ) is odd, and the equation σ + χ(0)g(σ) = 0 has exactly two nonzero roots σ = ±σ0. Suppose that k = –χ(0)–1. System (2) can be written as follows
where φ(σ) = g(σ) – kσ, A1 = A + kbcT the matrix A1 has zero eigenvalue, φ(±σ0) = 0. Let A1d = 0. From the assumption that the function χ(p) is nondegenerate, it follows [17] that cTd = μ ≠ 0. Then x = 0 and x = \( \pm {{\sigma }_{0}}{{\mu }^{{ - 1}}}d\) are the equilibrium states of system (3).
Assume that the system under consideration has a chaotic attractor Ω, entirely located in the band Π = {x: –σ1 < cTx < σ1}, where σ1 ≥ σ0. That is, for any x ∈ Ω, the relation cTx(t, x0) ⊂ Π holds true for t ≥ 0. By replacing the function φ(σ) with 2σ1-periodic function ψ(σ), which coincides with φ(σ) in [–σ1, σ1], we will have a system with an infinite number of equilibrium states and a 1-D grid of attractors obtained by shifting the attractor Ω of system (3) in the direction of the vector d.
Let us illustrate the implementation of the described algorithm for generating a system with a 1-D grid of attractors using the generalized Chua system considered in [8, 11]. A generalized Chua system is system (3) with
Here,
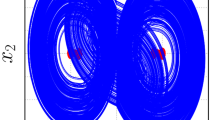
System (4) has three equilibrium states: (0, 0, 0) and (\( \mp (\gamma + \beta )\rho \), \( \mp \gamma \rho \), \( \pm \beta \rho \)), where ρ = [m0 – m1 + (s – m0)δ][β + m1(γ + β)]–1. Moreover, the matrix A1 = A + kbcT for k = –β(γ + β)–1 has a single zero eigenvalue, and the function φ(σ) = g(σ) – kσ has three zeros: σ = 0, σ = ±(γ + β)ρ. Following [11], we chose the following parameter values: α = 8.4562, β = 12.0732, γ = 0.0052, s = −0.9668, δ = 0.2, m0 = 0.14, m1 = −1.1468. For such parameter values, as shown in [11], the system under consideration has three hidden attractors: a cycle and two chaotic twin attractors located in the band |x| ≤ x0 < 2. These attractors shown in Fig. 1 can be detected by numerically integrating the system with the initial conditions x0 = (–0.458, −0.107, 2.522)) and x1, 2 = (±1.360, ±1.633, ±1.631).

Hidden attractors of system (4).
Now we replace the function φ(σ) in (4) with the periodic function ψ(σ) with the period Δ = –2(γ + β)ρ which coincides with the function φ(σ) in [(γ + β)ρ, –(γ + β)ρ]. Then the new system will have a 1‑D grid of identical hidden attractors shown in Fig. 2. The following procedure can be used to find these attractors: if x0 is a point belonging to some attractor of system (4), d is an eigenvector of the matrix A1, q = \(\Delta d{{({{c}^{T}}d)}^{{ - 1}}}\), then the points x0 + jq, j = 0, ±1, ±2, … belong to attractors of a 1-D grid. The chaotic attractors shown in Figs. 1 and 2 have Lyapunov exponents (0.121, 0, –1.13) and the Kaplan–Yorke dimension 2.107.

1-D grid of attractors of system (4) with periodic nonlinearity.
It is clear that the described method does not make it possible to generate systems with attractor grids of dimension greater than 1. In the next section, we will use the fact that multidimensional system (2) can always be reduced to a cascade system using a nonsingular linear transformation. The latter circumstance will make it possible to use system (4) with transfer function (5) to construct a system with a 2‑D grid of identical attractors.
2 GENERATION OF SYSTEMS WITH A MULTIDIMENSIONAL GRID OF ATTRACTORS
The following proposition [17] is well known: Two systems as (2) with the same transfer function are equivalent up to a nonsingular linear transformation of their coordinates. If χ(p) = (c0 + c1p + … + \({{c}_{{n - 1}}}{{p}^{{n - 1}}}\))(a0 + a1p + … + \({{a}_{{n - 1}}}{{p}^{{n - 1}}}\) + pn), then system (2) can be reduced as follows by the nonsingular transformation x = My as shown in [17]
Moreover, the M transformation matrix can be found from the following system of equations
System (6) is a cascade system. If system (2) had an attractor, then system (6) obviously also has an attractor, which can be “cloned” by introducing periodic functions into the system. Therefore, we can try to construct a multistable system with a (n – 1)-D grid of attractors.
First, let us illustrate the implementation of the described idea by the example of the generalized Chua system (3), (4) considered in Section 1. Having found the transfer function χ1(p) = \({{c}^{T}}({{A}_{1}} - pI)b\) for the selected parameter values, we write system (6) as follows:
where a0 = \(\alpha [\beta ({{m}_{1}} + 1) + \gamma {{m}_{1}}]\), a1 = \(\gamma + \beta + \alpha \gamma ({{m}_{1}} + 1) + \alpha {{m}_{1}}\), a2 = \(\gamma + \alpha ({{m}_{1}} + 1) + 1\), c0 = \(\alpha (\beta + \gamma )\), c1 = \(\alpha (1 + \gamma )\), c2 = α. Having found the M matrix from Eqs. (7), we determine the points that belong to the hidden attractors of the transformed system: M–1x0 = (0.0247, 0.0126, −0.2569), M–1x1, 2 = (±0.0160, \( \mp \)0.1933, \( \mp \)0.1595). Knowing the points that belong to hidden chaotic attractors of the transformed system, we can calculate their Lyapunov exponents and the Kaplan–Yorke dimension. As expected, they coincide with the characteristics of the attractors shown in Fig. 1.
Now we replace y and z variables with π-periodic functions in system (8): y → 0.64sin(2y), z → 0.542sin(2z). The new system is as follows
System (9) has a 2-D grid of hidden attractors that can be detected by numerical integration with initial conditions (0.006, 0.043 ± πk, –0.062 ± πm) and (±0.047, \( \mp \)0.135 ±πk, \( \mp \)0.225 ± πm), k, m ∈ \(\mathbb{N}\). The three hidden attractors of this grid as well as a part of the 2-D grid of attractors of system (9) (projection onto the plane (y, z)) are shown in Figs. 3 and 4. All identical chaotic attractors of system (9) have Lyapunov exponents (0.126, 0, –0.986) and Kaplan–Yorke dimension 2.138.

Hidden attractors of system (9) in a neighborhood of the point (0, 0, 0).

Part of a 2-D grid of hidden attractors of system (9).
Now we turn to the system considered in [16]. Let us write this system in a form convenient for us:
System (10) has two equilibrium states: (0.5(3.7 ± \(\sqrt {9.69} \)); −0.85(3.7 ± \(\sqrt {9.69} \)); 0). Moreover, a chaotic attractor with Lyapunov exponents (0.044, 0, –1.044) and Kaplan–Yorke dimension 2.042 is excited from the neighborhood of one of them, namely, from the point (3.4, –5.78, 0). The projection of this attractor onto the plane (y, z) is shown in Fig. 5.

Self-excited attractor of system (10).
It is obvious that system (10) admits a shift in the variable z. Using this circumstance, the authors of [16] generated different 1-D grids of identical chaotic attractors replacing the variable z with periodic functions msin(nz) and mcos(nz) in system (10).
Here, we use the method described above for generating a 2-D grid of chaotic attractors based system (10). The transfer function of system (10) has the form χ(p) = –(p3 + p2 + 1.7p + 1.7)–1. Therefore, after the corresponding linear transformation: x → x, y → –1.7x – z, z → –y, we obtain the system
The attractor of system (11) is visualized during numerical integration with the initial condition (3.4, 0, 0). Its projection onto the plane (y, z) is shown in Fig. 6.

Self-excited attractor of system (11).
By replacing the variables y and z in system (11) with periodic functions y → 3.1 sin(y/2), z → 3.406 sin(z/3), we obtain the following system
System (12) has a 2-D grid of self-excited chaotic attractors, a part of which is shown in Fig. 7. All attractors of this grid have Lyapunov exponents (0.099, 0, –1.011) and Kaplan–Yorke dimension 2.098.

Part of a 2-D grid of attractors of system (12) (projection onto the plane (y, z)).
CONCLUSIONS
We proposed different approaches in this article to the generation of extremely multistable systems with infinite grids of clone attractors based on multidimensional models of Lurie systems. We discussed methods for transforming such systems that make it possible to reduce them to variable-boostable cascade systems by choosing a special basis. It is therefore possible to generate systems with an infinite grid of chaotic attractors using numerous known examples of the existence of chaotic attractors in Lurie systems without resorting to an exhaustive computer search.
REFERENCES
Z. H. Guan, F. Huang, and W. Guan, “Chaos-based image encryption algorithm,” Phys. Lett. A 346, 153–157 (2005).
T. Gao and Z. Chen, “A new image encryption algorithm based on hyper-chaos,” Phys. Lett. A 372, 394–400 (2008).
E. Y. Xie, C. Li, S. Yu, and J. Lu, “On the cryptanalysis of Fridrich’s chaotic image encryption scheme,” Signal Process. 132, 150–154 (2017).
S. Wang, J. Kuang, J. Li, Y. Luo, H. Lu, and G. Hu, “Chaos-based secure communications in a large community,” Phys. Rev. E 66, 065202R (2012).
G. Wang and S. He, “A quantitative study on detection and estimation of weak signals by using chaotic Duffing oscillators,” IEEE Trans. Circuits Syst.-I: Fund. Theor. Appl. 50, 945–953 (2003).
Z. Liu, X. H. Zhu, W. Hu, and F. Jiang, “Principles of chaotic signal radar,” Int. J. Bifurcation Chaos 17, 1735 (2007).
G. A. Leonov, “Efficient methods for the search for periodic oscillations in dynamical systems,” Prikl. Mat. Mekh. 74 (1), 37–49 (2010).
V. O. Bragin, V. I. Vagaitsev, N. V. Kuznetsov, and G. A. Leonov, “Algorithms for finding hidden oscillations in nonlinear systems. The Aizerman and Kalman conjectures and Chua’s circuits,” J. Comput. Syst. Sci. Int. 50, 511–543 (2011).
G. A. Leonov, N. V. Kuznetsov, and V. I. Vagaitsev, “Localization of hidden Chua’s attractors,” Phys. Lett. A 375, 2230–2233 (2011).
D. Dudkowski, S. Jafari, T. Kapitaniak, N. V. Kuznetsov, G. A. Leonov, and A. Prasad, “Hidden attractors in dynamical systems,” Phys. Rep. 637, 1–50 (2016).
I. M. Burkin and N. K. Nguen, “Analytical-numerical methods of finding hidden oscillations in multidimensional dynamical systems,” Differ. Equations 50, 1695–1717 (2014).
I. M. Burkin, “Hidden attractors of some multistable systems with infinite number of equilibria,” Chebyshevskiy Sb. 18 (4), 18–33 (2017).
C. Li, J. C. Sprott, W. Hu, and Y. Xu, “Infinite multistability in a self-reproducing chaotic system,” Int. J. Bifurcation Chaos 27, 1750160 (2017).
C. Li, J. C. Sprott, and Y. Mei, “An infinite 2-D lattice of strange attractors,” Nonlinear Dyn. 89, 2629–2639 (2017).
C. Li, J. C. Sprott, T. Kapitaniak, and T. Lu, “Infinite lattice of hyperchaotic strange attractors,” Chaos, Solitons Fractals 109, 76–82 (2018).
C. Li, W. J. Thio, J. C. Sprott, H. H. C. Iu, and Y. Xu, “Constructing infinitely many attractors in a programmable chaotic circuit,” IEEE Access 6, 29003 (2018).
G. A. Leonov, Control Theory (St.-Peterb. Gos. Univ., St. Petersburg, 2006) [in Russian].
Author information
Authors and Affiliations
Corresponding authors
Additional information
Translated by O. Pismenov
About this article

Cite this article
Burkin, I.M., Kuznetsova, O.I. Generation of Extremely Multistable Systems Based on Lurie Systems. Vestnik St.Petersb. Univ.Math. 52, 342–348 (2019). https://doi.org/10.1134/S1063454119040034
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S1063454119040034