
Abstract
We apply the Riemann–Hilbert method to the generalized mixed nonlinear Schrödinger equation and obtain a new formula for an explicit \(N\)-soliton solution, which is expressed as a ratio of \((N+1)\times(N+1)\) and \(N\times N\) determinants. Using asymptotic analysis and the property of the Cauchy determinant, we derive simple elastic interactions of \(N\)-solitons.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1. Introduction
Propagations of ultrashort light pulses in optical fibers have attracted considerable attention because of their extensive applications to telecommunication and ultrafast signal-routing systems. In 1973, Hasegawa and Tappert [1], [2] theoretically proposed an accurate model describing propagation of soliton-type optical pulses in a monomode fibers without the inclusion of higher-order nonlinear effects in the picosecond regime, i.e., the well-known nonlinear Schrödinger (NLS) equation [3], [4]. Due to experimental achievements in soliton-type pulse propagation in optical fibers [5], it is increasingly believed that the next generation of optical communication will be revolutionized by optical solitons.
The realization of picosecond pulse propagation through a single-mode nonlinear optical fiber in accordance with the NLS equation depends on the delicate balance between group velocity dispersion and self-phase modulation. self-phase modulation is the dominant nonlinear effect in silica fibers due to the Kerr effect. Nevertheless, as the advances in the area of laser technology and the demand to have the large channel handing capacity and the high speed, one always has to transmit solitary waves at a high bit rate of ultrashort pulses. For example, the current technology can generate few-cycle pulses at the attosecond scale [6], [7]. In this case, the standard NLS equation is inadequate to accurately model the propagation of ultrashort pulses [8]. Thus, it is our task to derive new models or a generalized NLS equation to describe ultrashort pulses, including other effects such as self-steepening, the self-frequency shift, and a quintic non-Kerr nonlinearity. By considering the higher-order nonlinear effects, a variety of generalized nonlinear Schrödinger equations were proposed to describe the propagation of ultrashort light pulses in optical fibers [9]–[15].
In this paper, we focus on the integrable generalized mixed nonlinear Schrödinger (GMNLS) equation
which was derived by Kundu in studying gauge transformations for NLS-type equations [16]. With suitable choices of the parameters \(a\), \(b\), and \(\beta\), it was shown in [16] that the GMNLS equation can reduce to a series of nonlinear evolution equations that are important in mathematical physics; among them, there are four celebrated equations: the three kinds of derivative nonlinear Schrödinger equations [17]–[19] and the Kundu–Eckhaus equation [16], [20]. It has been noted that the GMNLS equation may be the simplest integrable extension of the nonlinear Schrödinger equation containing both the quintic and self-steepening terms and is a reduction of certain cubic–quintic extended nonlinear Schrödinger equations [14], [15]. In physics, the last three terms in Eq. (1) respectively represent the self-steepening effect, the quintic nonlinearity, and the self-frequency shift effect. The GMNLS equation can also be viewed as a degeneration of the Johnson equation [21]. Many interesting and exciting results have been obtained for the GMNLS equation. Its Lax pair was given by Kundu [16] and its Painlevé property was tested by Clarkson and Cosgrove [22]. It admits both multi-soliton solutions and rogue-wave solutions, which were obtained by the Hirota bilinear method and the Darboux transformation method [23]–[26]. In [27], the authors calculated infinitely many conservation laws for it.
Based on the original inverse scattering transformation [28]–[30], Novikov et al. [31] developed the Riemann–Hilbert method, which is a simple version of the dressing method and allows avoiding the complicated Gel’fand–Levitan–Marchenko integral equations. In recent years, many researchers have been interested in applying the Riemann–Hilbert method to numerous integrable soliton equations with initial boundary values [32]–[40].
In this paper, we apply the Riemann–Hilbert method to GMNLS equation (1), being motivated by the following three problems.
-
1.
The \(N\)-soliton formula for the GMNLS equation was constructed by virtue of the Darboux transformation very recently [24]. It can be seen that the \(N\)-soliton solution constructed there is the ratio of \(2N\times 2N\) determinants, which may not be convenient for practical purposes. Moreover, the formula for \(N\)-soliton solutions obtained in [24] relies on an extra variable \(\rho_n\), which satisfies a rather complicated system of two differential equations. Thus, it is an interesting question to apply the Riemann–Hilbert method to the GMNLS equation to obtain a more compact and explicit formula for the \(N\)-soliton solutions of the GMNLS equation.
-
2.
It was shown in [16] that there exists a simple gauge transformation \(q=u\exp(-2i\beta\int^x|u|^2\,dx)\) connecting a solution \(q\) of the GMNLS equation and a solution \(u\) of the mixed nonlinear Schrödinger equation, and the transformation implies that \(|q|=|u|\). However, it is difficult to apply this transformation to express an \(N\)-soliton solution of the GMNLS equation given a solution of the mixed nonlinear Schrödinger equation. In this paper, we show that in using the Riemann–Hilbert method to obtain an explicit expression for the \(N\)-soliton solution, a key question is how to solve the explicit expression for \(J_0\) (it is given in Sec. 2).
-
3.
As we know, a remarkable character of the interactions between \(N\) solitons is that the profile and velocity of \(N\) solitons are preserved, while each soliton merely suffers a phase shift. Recently, an elastic collision of two solitons for the GMNLS equation was discussed in [24]. Naturally, it is worth verifying the elastic collision property of the soliton solutions of the GMNLS equation in the general situation.
The structure of this paper is as follows. In Sec. 2, based on the Jost solutions of the Lax pair for (1), we formulate the Riemann–Hilbert problem. In Sec. 3, we discuss the solution of the nonregular Riemann–Hilbert problem by applying the Plemelj formula. The expression for \(J_0\) (a key factor to construct an explicit solution) and the determinant expressions for \(N\)-soliton solutions are obtained. Based on the formula for \(N\)-soliton solutions, the explicit one-soliton solution is constructed and the evolution of two- and three-soliton solutions is plotted. Furthermore, the detailed asymptotic behavior of the \(N\)-soliton solution is analyzed. Finally, conclusions are given in Sec. 4.
2. Constructing the Riemann–Hilbert problem
GMNLS equation (1) can be obtained as the compatibility condition for two linear spectral problems [16]
with
Here, \(\Phi(x,t,\lambda)\) is an eigenfunction, \(\lambda\) is the spectral parameter, and the asterisk denotes complex conjugation. In what follows, we restrict our discussion to the zero boundary condition
We observe that
is a plane wave solution of linear spectral problems (2a) and (2b) as \(x\to\infty\). By setting \(\Phi=J\widetilde H\), the spectral problems are transformed to
with
Under the boundary conditions
the Jost solutions of spectral problem (4a) can be written as
In what follows, we restrict ourself to the case \(a<0\). Let \([J_\pm]_k\) denote the \(k\)th column vector of \(J_\pm\). It can be proved that \([J_-]_1,[J_+]_2\) are analytic for \(\lambda\in D_+\) and continuous for \(\lambda\in D_+\cup\mathbb R\cup i\mathbb R\), and \([J_+]_1,[J_-]_2\) are analytic for \(\lambda\in D_-\) and continuous for \(\lambda\in D_-\cup\mathbb R\cup i\mathbb R\), where
We set
Then \(J_-H\) and \(J_+H\) are two different solutions of linear problems (2a), and they are therefore linearly related by a scattering matrix \(S(\lambda)=(s_{ij})_{2\times2}\):
Because the trace of \(Q\) is zero, Abel’s identity shows that the determinants of \(J_\pm\) are constants for all \(x\). Then considering system (2) with the boundary conditions, we obtain
Based on (6), we have \(\det S(\lambda)=1\). Furthermore, from the analyticity of \(J_-\) and \(J_+\), we infer that \(s_{11}\) can be analytically continued to \(D_+\), and \(s_{22}\) can be analytically continued to \(D_-\).
To discuss the behavior of the Jost solution for very large \(\lambda\), we need to consider the expansion
Substituting this expression in spectral problem (4a) and comparing the coefficients at powers of \(\lambda\) yields
and
Similarly, substituting (7) in (4b), after a straightforward analysis we obtain a differential equation satisfied by \(J_0\):
We note that the compatibility of (9) and (10) is ensured by the identity
which is a conservation law for the GMNLS equation. Equations (9) and (10) lead to \((J_0)_{22}=(J_0)_{11}^{-1}\).
Next, we define a matrix
which is analytic for \(\lambda\in D_+\) and has the following asymptotic behavior at very large \(\lambda\):
To obtain an analytic function in \(D_-\), denoted by \(P_-\), we first consider the adjoint scattering equation of (4a):
It can be inferred that \(J_\pm^{-1}\) solve adjoint equation (13) and satisfy the boundary conditions \(J_\pm^{-1}\to I\) as \(x\to\pm\infty\). By a similar procedure, letting \([J_\pm^{-1}]^k\) denote the \(k\)th row vector of \(J_\pm^{-1}\) for convenience, we can see that the matrix function \(\begin{pmatrix} [J_-^{-1}]^1 \\ [J_+^{-1}]^2 \end{pmatrix}\) is also analytic in \(\lambda\in D_-\), and tends to \(J_0^{-1}\) as \(\lambda\to-\infty\). We can then define a matrix function
which is analytic in \(D_-\) and has the asymptotic behavior
Thus, we have obtained two matrix functions \(P_\pm(x,\lambda)\) that are respectively analytic for \(\lambda\in D_\pm\). With these two functions, we can formulate the Riemann–Hilbert problem
In the remainder of this section, we discuss the time evolution of the scattering matrix \(S(\lambda)\). Because \(J_-\) solves scattering problem (4b), substituting \(J_-=J_{\!+}H\!S\!H^{-1}\) in (4b), letting \({x\to +\infty}\), and considering the boundary condition for \(J_+\) together with the fact that \(\widehat V\to 0\) as \(x\to+\infty\), we can obtain
The above matrix equation implies
We have already calculated the time evolution of scattering data. In what follows, we discuss the nonregular Riemann–Hilbert problem involving these scattering data. Moreover, we solve the inverse problem, and the solution \(Q\) is then recovered from the solution of the nonregular Riemann–Hilbert problem.
3. Solution of the Riemann–Hilbert problem
To study nonregular Riemann–Hilbert problem (16), i.e., the problem where \(\det P_+=0\) for some \(\lambda\), we consider the symmetry properties of these zero points, which are determined by \(s_{11}(\lambda)=0\).
We note that \(s_{11}\) and \(s_{22}\) are time-independent, and so are the roots of \(s_{11}\) and \(s_{22}\). Furthermore, owing to the symmetries \(\sigma_3Q\sigma_3=-Q\) and \(Q^\dagger=-Q\), we have
where \(\dagger\) represents the operation of transposition and complex conjugation. We now use the above relations to obtain the symmetries of the scattering coefficients. Recalling scattering relation (6) and applying these two reduction conditions, we have
It follows from these equations that \(s_{11}\) is an even function, and hence for each zero \(\lambda_k\) of \(s_{11}(\lambda)\) there is another zero \(-\lambda_k\). Here, we only consider the case where all zeroes are simple, i.e., the kernels of \(P_+(\lambda_k)\) and \(P_-(\lambda_k)\) respectively contain only a single vector \(|v_k\rangle\) and \(\langle v_k|\):
Here \(|v_k\rangle=\langle v_k|^\dagger\). Taking the \(x\)- and \(t\)-derivatives of the first equation in (21) and recalling (4), we obtain
Then
Based on the above discussions, we arrive at the following theorem for the solution of nonregular Riemann–Hilbert problem (16).
Theorem 1 (see [39]).
The solution of nonregular Riemann–Hilbert problem (16) with simple zeroes \(\lambda_1,\dots,\lambda_N\) for \(\det P_+\) and \(\lambda_1^*,\dots,\lambda_N^*\) for \(\det P_-\), under the canonical normalization condition (12) and (15), is
where
\(|w_j\rangle\) is a column vector defined by \(|w_j\rangle=T_{j-1}(\lambda_j)\dotsb T_1(\lambda_j)|v_j\rangle\), and \(P^\pm\) is the unique solution of the regular Riemann–Hilbert problem
where \(P^\pm\) are respectively analytic in \(D_\pm\), and \(P^\pm\to I\) as \(\lambda\to \infty\).
Using (8), we can obtain the potential from the asymptotic expansion of Jost solutions as \(\lambda\to\infty\). For this, we first rewrite the expression for \(T(\lambda)\). Due to the identity \(T_k(\lambda)=\sigma_3T_k(-\lambda)\sigma_3\), \(T(\lambda)\) and \(T^{-1}(\lambda)\) can be represented as
where \(A_j=|z_j\rangle\langle y_j|\). We consider the algebraic equations
Solving them, we obtain
where the symbols \(|R\rangle_1\) and \(|R\rangle_2\) respectively denote the first and second components of a vector \(|R\rangle\). The entries of the matrices \(M\) and \(\widehat M\) are given by
The Plemelj formula shows that the solution of Riemann–Hilbert problem (25) can be expressed as
where \(\Gamma=[0,+\infty)\cup[0,-\infty)\cup(+i\infty,0]\cup(-i\infty,0]\). Thus, as \(\lambda\to\infty\),
From (26), we see that as \(\lambda\to\infty\),
Hence, \(J_1\) in (7) can be expressed as
To obtain the \(N\)-soliton solutions of the GMNLS equation, we set \(G=I\), i.e., \(s_{12}=s_{21}=0\), which is called the reflectionless case. From (8) and (32), the formula for the \(N\)-soliton solution is
whence
The remaining problem to obtain the explicit expression for the \(N\)-soliton solution is to solve for \(J_0\) explicitly. We therefore analyze the expression for \(J\) in the reflectionless case. From (29) and (25), it is easy to deduce that \(J\) is equal to \(J_0T(\lambda)\) or \(T(\lambda)^{-1}J_0^{-1}\).
It follows from (4) that
Combining this with (9) and (10) yields
whence
Next, we rewrite solution (34) in a compact determinant form. For this, we need the following two identities. If \(B\) is a \(N\times N\) matrix and \(\phi\) and \(\psi\) are \(1\times N\) column vectors, then
Based on these two identities, we obtain the following theorem for the \(N\)-soliton solution of the GMNLS equation.
Theorem 2.
The explicit \(N\) -soliton solution of the GMNLS equation is given by
where
Remark 1.
We note that the GMNLS equation reduces to the Kundu equation when the parameter \(b=0\). The \(N\)-soliton solution of the Kundu equation constructed by the Riemann–Hilbert method was given in Ref. [41] (see Eq. (4.23) there). The expression for the solution of the Kundu equation in Ref. [41] involves a complicated integral. In this sense, our formula here is more convenient for obtaining the explicit \(N\)-soliton solution of the Kundu equation.
Applying the formula for the \(N\)-soliton solution, Eq. (38), we calculate some solutions of the GMNLS equation and then consider the interactions of \(N\)-solitons.
Let \(N=1\),
and \(v_{k0}=(1,1)^{\mathrm T}\) in (38). Then the first-order soliton solution of the GMNLS equation is
where the subscripts \(\mathrm R\) and \(\mathrm I\) denote the real and imaginary parts. The real and imaginary parts of \(\theta_1\) are
If
the one-soliton solution reaches the amplitude \(|4\lambda_{1,I}|\). The profile of the one-soliton solution with the parameter \(\lambda_1=(1/2)+i\) is shown in Fig. 1.

One-soliton solution with the parameters \(\beta=1\), \(a=1\), \(b=1/4\), \(\lambda_{1,I}=1\), and \(\lambda_{1,R}=1/2\). (a) Two-dimensional plots at \(t=-1,0,1\). (b) Three-dimensional plot.
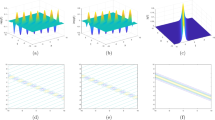
We next discuss the two-soliton solution. Let \(N=2\) and \(v_{k0}=(1,1)^{\mathrm T}\) in (38). We can obtain two kinds of soliton solutions depending on the parameters. In the first case, there is a bound state under the conditions \(\lambda_{1,\mathrm R}^2-\lambda_{1,\mathrm I}^2 =\lambda_{2,\mathrm R}^2-\lambda_{2,\mathrm I}^2\). In the second case, collision occurs under the condition \(\lambda_{1,\mathrm R}^2-\lambda_{1,\mathrm I}^2 \ne\lambda_{2,\mathrm R}^2-\lambda_{2,\mathrm I}^2\). The profiles of two-soliton solutions are shown in Fig. 2. Specifically, in Fig. 2, we can see that in the first case, the two constituent solitons stay together and form a bound state; in the second case, two solitons interact with each other and separate while preserving their amplitude and velocity and experiencing a constant shift.

Evolution of two-soliton solutions with the parameters \(\beta=1\), \(a=1\), and \(b=1/4\). (a) Bound state with the parameters \(\lambda_1=1+i\) and \(\lambda_2=2+2i\). (b) Collision with the parameters \(\lambda_1=1+i\) and \(\lambda_2=-1+2i\).

Evolution of three-soliton solutions with the parameters \(\beta=1\), \(a=1\), and \(b=1/4\) at (a) \(\lambda_1=1+2i\), \(\lambda_2=2+3i/2\), and \(\lambda_3=5/2+5i/2\), (b) \(\lambda_1=1+2i\), \(\lambda_2=1+i\), and \(\lambda_3=3/2+3i/2\), and (c) \(\lambda_1=1/2+i/2\), \(\lambda_2=1+i\), and \(\lambda_3=3/2+3i/2\).
To discuss the three-soliton solution, we let \(N=3\) and \(v_{k0}=(1,1)^{\mathrm T}\) in (38). The corresponding plots are shown in Fig. 3. We see from Fig. 3a that the three solitons interact with each other and then separate, experiencing only three constant shifts. Figure 3b shows that two solitons form a bound state and interact with the third soliton. Figure 3c shows three solitons that stay together and form a bound state.
Below, we give a detailed analysis of solution interactions in the \(N\)-soliton solution as the positions and amplitudes vary under some assumptions. First, we give a theorem on the interaction of \(N\) solitons.
Theorem 3.
Let \(v_{k0}=(1,1)^{\mathrm T}\) and
Then \(N\)-soliton (38) has the simple asymptotic behavior
as \(t\to\pm\infty\), where
The proof is given in the Appendix.
4. Conclusion and discussion
We have used the Riemann–Hilbert method to construct solutions of the GMNLS equation. The following interesting results can be noted.
-
1.
We observed that although the expressions for two sectional analytic functions \(P_\pm\) are different from those obtained previously because they involve an unknown matrix-valued function \(J_0\), the product \(P_-P_+\) magically satisfies a Riemann–Hilbert problem (16) for the GMNLS equation, which does not contain \(J_0\).
-
2.
The proposed strategy to obtain the explicit expression for \(J_0\) in the \(N\)-soliton solution (34) is highly nontrivial. By virtue of the exact expression for \((J_0)_{11}\), we have successfully constructed the explicit \(N\)-soliton formula (38) for the GMNLS equation, which improves the result in [41] corresponding to \(N\)-soliton solutions of the Kundu equation.
-
3.
Using formula (38), we obtained a one-soliton solution of the GMNLS equation and discussed the dynamical evolution of two- and three-soliton solutions. Moreover, the asymptotic behavior of the \(N\)-soliton solution was rigorously analyzed by employing the property of the Cauchy determinant, and the elastic collisions of \(N\) solitons were observed from the formulas.
In this paper, we restricted our discussion to the case where all poles of reflection coefficient are simple. We note that the Riemann–Hilbert problem with double poles was successfully solved for the Gerdjikov–Ivanov equation in [42]. However, as shown in the conclusion of [42], it remains a big challenge to apply the dressing method to obtain the explicit form of higher-order solitons of the Gerdjikov–Ivanov equation. We expect to construct higher-order soliton solutions of the GMNLS equation in the near future.
References
A. Hasegawa and F. Tappert, “Transmission of stationary nonlinear optical physics in dispersive dielectric fibers. I: anomalous dispersion,” Appl. Phys. Lett., 23, 142–144 (1972).
A. Hasegawa and F. Tappert, “Transmission of stationary nonlinear optical physics in dispersive dielectric fibers. II. Nnormal dispersion,” Appl. Phys. Lett., 23, 171–172 (1973).
R. Y. Chiao, E. Garmire, and C. H. Townes, “Self-trapping of optical beams,” Phys. Rev. Lett., 13, 479–482 (1964).
V. E. Zakharov, “Stability of perodic waves of finite amplitude on the surface of a deep fluid,” J. Appl. Mech. Tech. Phys., 9, 190–194 (1968).
L. F. Mollenauer, R. H. Stolen, and J. P. Gordon, “Experimental observation of picosecond pulse narrowing and solitons in optical fibers,” Phys. Rev. Lett., 45, 1095–1098 (1980).
T. Brabec and F. Krausz, “Intense few-cycle laser fields: Frontiers of nonlinear optics,” Rev. Modern Phys., 72, 545–591 (2000).
F. Krausz and M. Ivanov, “Attosecond physics,” Rev. Modern Phys., 81, 163–234 (2009).
G. P. Agrawal, Nonlinear Fiber Optics, Academic Press, London (2007).
Y. Kodama, “Optical solitons in a monomode fiber,” J. Statist. Phys., 39, 597–614 (1985).
P. A. Clarkson and J. A. Tuszyński, “Exact solutions of the multidimensional derivative nonlinear Schrödinger equation for many-body systems near criticality,” J. Phys. A: Math. Gen., 23, 4269–4288 (1990).
Kh. I. Pushkarov, D. I. Pushkarov, and I. V. Tomov, “Self-action of light beams in nonlinear media: Soliton solutions,” Opt. Quant. Electron., 11, 471–478 (1979).
D. I. Pushkarov and S. Tanev, “Bright and dark solitary wave propagation and bistability in the anomalous dispersion region of optical waveguides with third- and fifth-order nonlinearities,” Opt. Commun., 124, 354–364 (1996).
S. Tanev and D. I. Pushkarov, “Solitary wave propagation and bistability in the normal dispersion region of highly nonlinear optical fibres and waveguides,” Opt. Commun., 141, 322–328 (1997).
Y. J. Xiang, X. Y. Dai, S. C. Wen, J. Guo, and D. Y. Fan, “Controllable Raman soliton self-frequency shift in nonlinear metamaterials,” Phys. Rev. A, 84, 033815, 7 pp. (2011).
A. Choudhuri and K. Porsezian, “Dark-in-the-Bright solitary wave solution of higher-order nonlinear Schrödinger equation with non-Kerr terms,” Opt. Commun., 285, 364–367 (2012).
A. Kundu, “Landau–Lifshitz and higher-order nonlinear systems gauge generated from nonlinear Schrödinger-type equations,” J. Math. Phys., 25, 3433–3438 (1984).
D. J. Kaup and A. C. Newell, “An exact solution for a derivative nonlinear Schrödinger equation,” J. Math. Phys., 19, 798–801 (1978).
H. H. Chen, Y. C. Lee, and C. S. Liu, “Integrability of nonlinear Hamiltonian systems by inverse scattering method,” Phys. Scr., 20, 490–492 (1979).
V. S. Gerdjikov and M. I. Ivanov, “A quadratic pencil of general type and nonlinear evolution equations. II. Hierarchies of Hamiltonian structures,” Bulg. J. Phys., 10, 130–143 (1983).
F. Calogero and W. Eckhaus, “Nonlinear evolution equations, rescalings, model PDEs and their integrability. I,” Inverse Problems, 3, 229–262 (1987).
R. S. Johnson, “On the modulation of water waves in the neighbourhood of \(kh\approx 1.363\),” Proc. Roy. Soc. London Ser. A, 357, 131–141 (1977).
P. A. Clarkson and C. M. Cosgrove, “Painlevé analysis of the non-linear Schrödinger family of equations,” J. Phys. A: Math. Gen., 20, 2003–2024 (1987).
S. Kakei, N. Sasa, and J. Satsuma, “Bilinearization of a generalized derivative nonlinear Schrödinger equation,” J. Phys. Soc. Japan, 64, 1519–1523 (1995); arXiv: solv-int/9501005.
X. Lü, “Soliton behavior for a generalized mixed nonlinear Schrödinger model with \(N\)-fold Darboux transformation,” Chaos, 23, 033137, 8 pp. (2013).
B. Yang, J. C. Chen, and J. K. Yang, “Rogue waves in the generalized derivative nonlinear Schrödinger equations,” J. Nonlinear Sci., 30, 3027–3056 (2020).
L. Wang, D.-Y. Jiang, F.-H. Qi, Y.-Y. Shi, and Y.-C. Zhao, “Dynamics of the higher-order rogue waves for a generalized mixed nonlinear Schrödinger model,” Commun. Nonlinear Sci. Numer. Simul., 42, 502–519 (2017).
X. Lü and M. S. Peng, “Systematic construction of infinitely many conservation laws for certain nonlinear evolution equations in mathematical physics,” Commun. Nonlinear Sci. Numer. Simulat., 18, 2304–2312 (2013).
M. J. Ablowitz, D. J. Kaup, A. C. Newell, and H. Segur, “The inverse scattering transform-Fourier analysis for nonlinear problems,” Stud. Appl. Math., 53, 249–315 (1974).
C. S. Gardner, J. M. Greene, M. D. Kruskal, and R. M. Miura, “Method for solving the Korteweg-deVries equation,” Phys. Rev. Lett., 19, 1095–1097 (1976).
C. S. Gardner, J. M. Greene, M. D. Kruskal, and R. M. Miura, “Korteweg–deVries equation and generalizations. VI. Methods for exact solution,” Commun. Pure Appl. Math., 27, 97–133 (1974).
S. Novikov, S. V. Manakov, L. P. Pitaevskii, and V. E. Zakharov, Theory of Solitons. The Inverse Scattering Method, Consultants Bureau, New York (1984).
M. J. Ablowitz and A. S. Fokas, Complex Variables: Introduction and Applications, Cambridge Univ. Press, Cambridge (2003).
A. S. Fokas, A Unified Approach to Boundary Value Problems (CBMS-NSF Regional Conference Series in Applied Mathematics, Vol. 78), SIAM, Philadelphia, PA (2008).
J. Yang, Nonlinear Waves in Integrable and Nonintegrable Systems (Mathematical Modeling and Computation, Vol. 16), SIAM, Philadelphia, PA (2010).
J. Yang and D. J. Kaup, “Squared eigenfunctions for the Sasa–Satsuma equation,” J. Math. Phys., 50, 023504, 21 pp. (2009); arXiv: 0902.1210.
D.-S. Wang, D.-J. Zhang, and J. K. Yang, “Integrable properties of the general coupled nonlinear Schrödinger equations,” J. Math. Phys., 51, 023510, 17 pp. (2010).
B. L. Guo and L. M. Ling, “Riemann–Hilbert approach and \(N\)-soliton formula for coupled derivative Schrödinger equation,” J. Math. Phys., 53, 073506, 20 pp. (2012).
X. G. Geng and J. P. Wu, “Riemann–Hilbert approach and \(N\)-soliton solutions for a generalized Sasa–Satsuma equation,” Wave Motion, 60, 62–72 (2016).
Y. S. Zhang, Y. Cheng, and J. S. He, “Riemann–Hilbert method and \(N\)-soliton for two-component Gerdjikov–Ivanov equation,” J. Nonlinear Math. Phys., 24, 210–223 (2017).
J. Hu, J. Xu, and G.-F. Yu, “Riemann–Hilbert approach and \(N\)-soliton formula for a higher-order Chen–Lee–Liu equation,” J. Nonlinear Math. Phys., 25, 633–649 (2018).
L. Wen, N. Zhang, and E. G. Fan, “\(N\)-soliton solution of the Kundu-type equation via Riemann–Hilbert approach,” Acta Math. Sci., 40, 113–126 (2020).
J. J. Yang, J. Y. Zhu, and L. L. Wang, “Dressing by regularization for the Gerdjikov–Ivanov equation and higher-order solitons,” arXiv: 1504.03407.
Funding
This work is supported by the National Natural Science Foundation of China (Grant Nos. 11871471 and 11931017), the Yue Qi Outstanding Scholar Project, China University of Mining & Technology, Beijing (Grant No. 00-800015Z1177), and the Fundamental Research Funds for Central Universities (Grant No. 00-800015A566).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
The authors declare no conflicts of interest.
Additional information
Translated from Teoreticheskaya i Matematicheskaya Fizika, 2022, Vol. 210, pp. 331-349 https://doi.org/10.4213/tmf10055.
Appendix: Proof of Theorem 3
Because \(\operatorname{Im}(a\lambda_k^2+b/2a)<0\), \(k=1,2,\dots,N\), the asymptotic behavior of \(e^{\theta_k}\) is determined by \({x-4\operatorname{Re}(a\lambda_k^2+b/2a)t}\). We let \(\Omega_k\) denote a neighborhood of \(x=4\operatorname{Re}(a\lambda_k^2+b/2a)t\). In the limit as \({t\to +\infty}\), these neighborhoods are separated from each other. In \(\Omega_k\), we have
We note that the above discussions related to the asymptotic behavior of the \(k\)th soliton requires \(1<k<N\). The asymptotic behavior of the first and \(N\)th solitons can be derived similarly: if \(k=1\), we just need to set
Rights and permissions
About this article

Cite this article
Qiu, D., Lv, C. Riemann–Hilbert approach and \(N\)-soliton solutions of the generalized mixed nonlinear Schrödinger equation. Theor Math Phys 210, 287–303 (2022). https://doi.org/10.1134/S0040577922030011
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S0040577922030011