
Abstract
An exact solution is constructed for the problem of creep and fracture of a hollow cylinder made of a physically nonlinear rheonomic isotropic incompressible material, which obeys Rabotnov’s constitutive viscoelasticity relation with two arbitrary material functions, under the action of internal and external pressures. Сlosed form equations for long-term strength curves are derived using three versions of a deformation fracture criterion, and the strain intensity, the maximum shear strain, or the maximum tensile strain is chosen as the measure of damage. Their properties are analytically investigated for arbitrary material functions of the constitutive relation.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 INTRODUCTION
The results of testing samples and structural elements show that, under a constant, even a sufficiently low load (causing stresses much lower than the ultimate strength), the strain increases in time (creep is observed) and fracture occurs after certain time \(t_{*}\) after the application of the load (due to creep and related damage accumulation mechanisms). Lifetime \(t_{*}\) depends on the load, the temperature, and other parameters and can be a few years. The dependence of \(t_{*}\) on the load or the related stress in a sample \(t_{*}\)(σ) (or the inverse dependence σ(\(t_{*}\))) is called the long-term strength curve of a material or structural element. The data of testing various viscoelastoplastic materials [1–9] show that the \(t_{*}\)(σ) dependences always decrease, \(t_{*}\)(σ) → +∞ at σ → σ0 and \(t_{*}\)(σ) → 0 at σ → \(\sigma _{*}\), were σ0 ≥ 0 is the (conventional) creep threshold and \(\sigma _{*}\) > 0 is the instantaneous ultimate tensile strength \(\sigma _{*}\).
To predict the lifetime during creep and to simulate the long-term strength of viscoelastic materials, a selected (or constructed) constitutive relation (CR) describing their deformation should be supplemented with a fracture criterion characterizing the fracture time \(t_{*}\) when a critical measure of damage ω(t) (scalar, vector, or tensor [1–9]) is reached. The simplest type of fracture criteria is represented by the classical deformation fracture criteria postulating that ω(t) = Cε(t) and fracture occurs at time t = \(t_{*}\) when a certain measure of strain ε(t, σ) reaches the limiting value \(\varepsilon _{*}\), \(\varepsilon (t_{*}{\text{,}}\sigma ) = \varepsilon _{*}\). They can describe the fracture of both a material and a structural element. It is important that a selected criterion and CR interact well with each other, i.e., make it possible to derive equations for theoretical creep curves ε = ε(t, σ, T) and a long-term strength curve \(t_{*} = f{\text{(}}\sigma ,T)\), or σ = \(F = (t_{*}{\text{, }}T{\text{)}}\), where \(t_{*}\) is the time to failure at given stress σ and temperature T; to analytically investigate (in general form) the dependence of the properties of a long-term strength curve on (arbitrary) material functions (MFs), CR parameters, and fracture criterion; and find the restrictions on them that ensure the coincidence the qualitative properties of theoretical curves with the typical properties of experimental curves [9, 10].
This article continues the series of works [11–15] devoted to a systematic analytical study of a physically nonlinear CR for viscoelasticity of the form
Here Π and Π0 are the shear and volumetric creep functions, respectively; Φ and Φ0 are the nonlinearity functions; σ0 = σii(t)/3 is the average stress (first invariant of tensor σ(t)); and σ = (1.5sijsij)0.5 is the stress intensity (second invariant of the deviator s = σ – σ0I).
Equation (1) describes the isothermal processes of deformation of nonaging isotropic viscoelastic materials by connecting the histories of changes in stress tensors σ(t) and small strains ε(t) at an arbitrary point in a body (stress and time are assumed to be dimensionless). This equation is one of the simplest versions of the generalization of uniaxial Rabotnov’s relation with two material functions φ and Π [16–20],
to the case of a complex state of stress. It was obtained under the assumption of isotropy and tensor linearity of a material and the absence of mutual influence of the spherical and deviator parts of the tensors (independence of volumetric strain θ = 3ε0 = εii(t) from shear stresses and independence of shear strains from average stress σ0) and by neglecting the influence of their third invariants (Φ = φ–1).
The main problems of this work are as follows: (1) to analytically analyze the evolution of the deformed state of a thick-walled tube made of nonlinear hereditary material, which obeys Eq. (1), during creep under constant (internal, external) pressures; (2) to obtain a general expression for the time to failure of a tube through the pressures and MF using three variants of the deformation criterion of fracture (strain intensity, maximum shear strain, and maximum tensile strain were chosen as the measure of damage); and (3) to derive equations for the corresponding long-term strength curves and to analytically investigate their properties at arbitrary material functions of Rabotnov’s CRs. These problems have not been solved in general form even for a tube made of an isotropic hereditary material, which obeys a linear viscoelasticity CR with arbitrary functions of shear and volumetric creep, although the problem of calculating a thick-walled tube in terms of the theory of elasticity and elastoplasticity is a classical comprehensively studied problem [3, 21, 22].
2 RABOTNOV’S CONSTITUTIVE RELATION AND RESTRICTIONS ON ITS MATERIAL FUNCTIONS
A uniaxial version of CR (3) was proposed by Rabotnov [16–20] to describe nonlinear creep as a generalization of the one-dimensional linear viscoelasticity CR
by introducing an additional MF φ(u). The creep and relaxation functions Π(t) and R(t) in Eqs. (4) and (3) are related by the integral equation
which expresses the condition of mutual inverseness of operators (4) (and (3)). In English-language works, CR (3) is called the quasi-linear viscoelasticity (QLV) equation and its author is considered to be Fung [23‒32]. In papers [16–20, 33–35], CR (3) was applied to describe the one-dimensional behavior of graphite, metals, alloys, and composites; in [23–32], it was used to describe ligaments, tendons, and other biological tissues. Detailed reviews of the literature and the fields of application of CR (3) are given in [12–15].
In the one-dimensional case, inverse CR (3) has the form σ = Rφ(ε) (composition of the operator of action of function φ and linear operator R from Eq. (4). The inversion of three-dimensional CR (1) for any increasing MFs Φ and Φ0 is written as
where φ = Φ–1, φ0 = \(\Phi _{0}^{{ - 1}}\), and the R(t) and R0(t) relaxation functions are related by equations of form (5). Among the three material functions φ, Π, and R in CR (3), only two are independent, and CR (1) contains four independent MFs.
We impose the same minimal restrictions on the creep and relaxation functions in CRs (3) and (1) as in the linear theory of viscoelasticity: Π(t), Π0(t), R(t), and R0(t) are assumed to be positive and differentiable in (0, ∞); functions Π and Π0 are assumed to be increasing and convex up [36]; R and R0 are decreasing and convex down in (0, ∞); and functions R(t) and R0(t) can have an integrable singularity or δ singularity at point t = 0 (term ηδ(t), where η > 0 and δ(t) is a delta function). These conditions imply the existence of the limit Π(0) = infΠ(t) ≥ 0 (y(0): = y(0+) is the designation of the limit of function y(t) on the right at point t = 0).
We impose the following minimum requirements on MFs φ and φ0 in CRs (3) and (6) and on MFs Φ(x) and Φ0(x) in CR (1) [12–15]: function φ(u) is continuously differentiable and strictly increases on (0; ω), where ω > 0 and φ0(u), on the set (ω–; 0) \( \cup \) (0; ω+), where ω–ω+ < 0; here, φ(0+) = 0 and φ(0+) = φ0(0–) = 0 (otherwise, a nonzero response σ(t) corresponds to the input process ε(t) ≡ 0). An increase in φ(u) and φ0(u) leads to the existence and increase of inverse functions Φ(x) = φ–1, x ∈ (0; X), X:= supφ(u) and Φ0(x) = \(\varphi _{0}^{{ - 1}}\), x ∈ (\(\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{x} ;\bar {x}\)), where \(\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{x} = {{\varphi }_{0}}({{\omega }_{ - }}; + 0)\), \(\bar {x}\) = φ0(ω+; –0), and the reversibility of CR (1). Similarly, the reversibility of CR (1) follows from an increase in Φ and Φ0. The families of the functions that can be conveniently used to set MFs Φ, Φ0 or φ, φ0 are given in [12–15].
3 FORMULATION AND SOLUTION OF THE BOUNDARY PROBLEM
Consider the problem of determining the stresses and strains in a hollow cylinder made of a hereditary incompressible material obeying nonlinear Rabotnov’s CR (1) under the action of constant pressures p1 and p2 set on the inner and outer cylinder surfaces at t > 0. We use a cylindrical coordinate system. Let r1 and r2 be the inner and outer radii of the unloaded cylinder (at t = 0). Then, the boundary conditions have the form
The solution will also be valid in the case where pressures p1(t) and p2(t) depend on time and change slowly, so that the influence of the inertial terms in the equations of motion can be neglected.
The problem is axisymmetric; therefore, at any point (r, θ, z) at any time, all components of displacements, strains, and stresses do not depend on angle Θ,
where the notation u:= ur(r, t) is introduced for the radial displacement.
The tube is assumed to be fixed at the ends so that the axial displacement is uz = 0 tangential stresses are absent at the ends, σzθ = 0 and σrz = 0. Then, the tube is in the state of plane deformation, ur and σz do not depend on z, and (apart from Eq. (8)), the equalities
hold true.
As follows from Eqs. (8) and (10), the strain and stress tensors are diagonal, ε = diag\(\left\{ {{{\varepsilon }_{r}},{{\varepsilon }_{\theta }},0} \right\}\) and σ := diag\(\left\{ {{{\sigma }_{r}},{{\sigma }_{\theta }},{{\sigma }_{z}}} \right\}\), and the coordinate dependences of the nonzero components have the form ur(r, t), εr(r, t), εθ(r, t), σr(r, t), σθ(r, t), and σz(t).
Due to the symmetry of the stress field (Eqs. (8), (10)), the set of equations of equilibrium of the medium is equivalent to the following equation in the projection onto a radius:
We use the assumption of the incompressibility of the material, εr + εθ + εz = 0. Since εz ≡ 0, it takes the form εr + εθ = 0. Using Eq. (9), we obtain the ordinary differential equation \({{\partial u} \mathord{\left/ {\vphantom {{\partial u} {\partial r}}} \right. \kern-0em} {\partial r}} + {u \mathord{\left/ {\vphantom {u r}} \right. \kern-0em} r} = 0\) for u(r, t) and have
From Eqs. (12) and (9), all nonzero components of the strain tensor are expressed through one unknown function C(t),
CR (1) is applied. Due to the incompressibility of the material, the strain deviator coincides with this CR and CR (1) is reduced to one-dimensional CR ε = Φ(Πσ) with two arbitrary MFs (Φ and Π or φ and R), which relates the stress and strain intensities, and to the condition of proportionality of deviators (6),
The first equation in CR (6) is not used, and the average stress is found by solving the boundary problem, as usually under incompressibility condition.
Since εij(t) ≡ 0 at i ≠ j and εz ≡ 0 at any point, the strain deviator has the form e = diag\(\left\{ {{{\varepsilon }_{r}},{{\varepsilon }_{\theta }},0} \right\}\) and the strain intensity is
Depending on the ratio of the histories of pressures p1(τ) and p2(τ), any sign of C(t) is possible.
The stress deviator is also diagonal at any point due to the tensor linearity of CR,
where σ0(r, t) = (σr + σΘ + σz)/3 is the average stress.
According to Eq. (14), the deviators are proportional; therefore, σz – σ0 ≡ 0 (at t when ε(t) ≠ 0, i.e., C(t) ≠ 0) from the condition ez ≡ 0. From whence, we have
Then, \(\left| {{{\sigma }_{r}} - {{\sigma }_{0}}} \right|\) = \(\left| {{{\sigma }_{\theta }} - {{\sigma }_{0}}} \right|\), \(\left| {{{\sigma }_{r}} - {{\sigma }_{z}}} \right|\) = \(\left| {{{\sigma }_{\theta }} - {{\sigma }_{z}}} \right|\) = 0.5\(\left| {{{\sigma }_{r}} - {{\sigma }_{\theta }}} \right|\) and the stress intensity expression is simplified,
From the condition of proportionality of deviators (14), we have σr – σ0 = \(\frac{2}{3}{{{{\varepsilon }_{r}}\sigma } \mathord{\left/ {\vphantom {{{{\varepsilon }_{r}}\sigma } \varepsilon }} \right. \kern-0em} \varepsilon },\) and σθ – σ0 = \(\frac{2}{3}{{{{\varepsilon }_{\theta }}\sigma } \mathord{\left/ {\vphantom {{{{\varepsilon }_{\theta }}\sigma } \varepsilon }} \right. \kern-0em} \varepsilon }\). From Eqs. (13) and (15) we find
where the stress intensity is
The equilibrium of equilibrium in the projection onto a radius has form (11). Subtracting the formulas in Eq. (17) from each other, we find σr – σθ = \( - \frac{2}{{\sqrt 3 }}\operatorname{sgn} C(t)\sigma \); substituting this expression into Eq. (11), we obtain σr, r = \(\frac{2}{{\sqrt 3 }}\operatorname{sgn} C(t)\sigma {{r}^{{ - 1}}}\), i.e.,
We integrate Eq. (19) over the range from r1 to r, use the permutability of the integration operators in r and τ, change the variable, and have \(x = \frac{2}{{\sqrt 3 }}\left| {C(t)} \right|{{\rho }^{{ - 2}}}:\)
Introducing the designations \(\bar {r}: = {r \mathord{\left/ {\vphantom {r {{{r}_{1}}}}} \right. \kern-0em} {{{r}_{1}}}},\) \(q: = {{\left( {{{{{r}_{1}}} \mathord{\left/ {\vphantom {{{{r}_{1}}} {{{r}_{2}}}}} \right. \kern-0em} {{{r}_{2}}}}} \right)}^{2}} \in (0;1),\) \(y(t): = \frac{2}{{\sqrt 3 }}C(t)r_{1}^{{ - 2}}\) (due to Eq. (15), |y(t)| = ε(r1) is the strain intensity at r = r1 and |y(t)| = ε(r2)/q), and
we have
and
i.e.,
Assuming r = r2 in Eq. (21), from second boundary condition (7) we obtain the integral equation
to determine y(t).
The increase in φ(x) and the condition φ(0) = 0 (then φ(x) > 0) lead to an increase in F(s) (Eq. (20)) in the rage s > 0. Therefore, the inequality \(F\left( {\left| {y(t)} \right|} \right)\) – \(F\left( {q\left| {y(t)} \right|} \right)\) > 0 is always valid (since q ∈ (0; 1)). Since relaxation function R(t) is positive, the function f(t) = R[\(F\left( {\left| {y(t)} \right|} \right) - F\left( {q\left| {y(t)} \right|} \right)\) ] is positive at any time and, hence, the sign sgny(t) coincides with z(t):= sgn(p1(t) – p2(t)). As a result, we have
Applying linear operator Π, which is inverse to R, to Eq. (22), we obtain the following functional equation for Y:= |y(t)|:
where P(t) is a known function if a creep function is specified.
After determining y(t) and C = \(\frac{{\sqrt 3 }}{2}y(t)r_{1}^{2}\) (approximately in the general case) from Eq. (23), we find the displacement, strain, and stress fields using Eqs. (12), (13), and (21),
where \(\bar {r}{\kern 1pt} :\,\, = {r \mathord{\left/ {\vphantom {r {{{r}_{1}}}}} \right. \kern-0em} {{{r}_{1}}}} \in [1,{{{{r}_{2}}} \mathord{\left/ {\vphantom {{{{r}_{2}}} {{{r}_{1}}}}} \right. \kern-0em} {{{r}_{1}}}}],\) and z = sgn(p1 – p2).
Stresses σθ, σz = (σr + σθ)/2, and σ0 = σz can be expressed from Eqs. (17) and (18),
i.e., we have
4 TIME MONOTONICITY OF STRAINS AT ANY POINT IN A TUBE
Let p1(t) – p2(t) = const at t > 0; that is, the problem of tube creep is considered. Then, due to Eq. (23), we have P(t) = \(\sqrt 3 \left| p \right|\Pi (t)\) and p:= p1 – p2 and Eq. (23) takes the form
We differentiate it with respect to time and prove that Y:= |y(t)| increases,
Since φ(x) increases, φ(Y(t)) – φ(qY(t)) > 0, \(\dot {Y}\) > 0 from the condition \(\dot {\Pi }\)(t) > 0, and Y(t) increases. Therefore, with allowance for Eqs. (24)–(26) and (15), the absolute values of displacement ur(r, t) and strains εr(r, t), εθ(r, t), and ε(r, t) increase with t. Since y(t) = \(Y(t)\operatorname{sgn} ({{p}_{1}} - {{p}_{2}})\), function y(t) is positive and increases at p1 – p2 > 0 and is negative and decreases at p1 – p2 < 0.
5 LONG-TERM STRENGTH CURVE FOR THE MEASURE OF DAMAGE EQUAL TO THE MAXIMUM TENSILE STRAIN
We derive an expression for the time to failure of a tube during creep at p:= p1 – p2 > 0. Then, we have y(t) = Y(t) > 0 and εθ(r, t) > 0, and circumferential tension strain εθ(r, t) increases with t (strain intensity also increases). A fracture criterion is taken to be
that is, the fracture condition is reaching limiting value \(\varepsilon _{*}\) by the maximum tensile strain at a certain point. From Eq. (26), we have
At any time, εθ(r, t) reaches its maximum at r = r1; therefore, the chosen fracture condition leads to the equation y(\(t_{*}\)) = \(c\varepsilon _{*}\) for fracture time \(t_{*}\), where y(t) is the solution to functional equation (30). Substituting \(t_{*}\) and y(\(t_{*}\)) = \(c\varepsilon _{*}\) into it, we obtain the following equation for \(t_{*}\):
where C(q, \(\varepsilon _{*}\)) is a known constant, which depends on parameters q and \(\varepsilon _{*}\) and MF φ and does not depend on pressure and creep function Π(t).
Since Π(t) increases monotonically, Eq. (31) has at most one solution. Since the condition Π(0) < Π(t) < Π(∞), where Π(0) ≥ 0 and Π(∞) ≤ ∞, should be met at t > 0, the following three cases are possible:
(1) if Π(0) < C(q, \(\varepsilon _{*}\))/p < Π(∞), Eq. (31) has one solution and the time to failure is determined by the formula
where Ψ := Π–1 is the inverse function of Π(t) (determined in the range [Π(0), Π(∞)]) and E := 1/Π(0) and E∞ = 1/Π(∞) are the instantaneous and long-term moduli of the deformation diagrams of linear viscoelasticity CR (4), respectively [36];
(2) if Π(∞) < ∞ (Π(t) is limited) and C(q, \(\varepsilon _{*}\))/p ≥ Π(∞), i.e., E∞> 0 and p ≤ C(q, \(\varepsilon _{*}\))E∞, Eq. (31) has no solutions and fracture does not occur in an arbitrary long time;
(3) if C(q, \(\varepsilon _{*}\))/p ≤ Π(0) (Π(0) > 0 should be met in this case), i.e., p ≥ \(p_{*}\) (where \(p_{*}\) = C(q, \(\varepsilon _{*}\))E), fracture occurs at time t = 0 when a load is applied (\(t_{*}\) = 0) and \(p_{*}\) is the limiting pressure of the tube.
Equation (32) demonstrates that the shape and the main qualitative properties of the long-term strength curve \(t_{*}\)(p) and the character of its dependence on the pressure difference p are mainly determined by the creep function and weakly depend on the MF φ, which sets nonlinearity in CR (1), and on the ratio of the radii. This behavior is due to the fact that φ and q affect only positive coefficient C(q, \(\varepsilon _{*}\)), which causes tension of curve (32) along axis p; therefore, they do not affect the presence of extremum or inflection points, the character of monotonicity or convexity, and the horizontal asymptotes. This result is all the more interesting because MF φ significantly affects (as proved in [12, 14]) the qualitative variety of the creep curves generated by CR (1). In particular, it makes it possible to simulate the third stage of creep curves (linear viscoelasticity CR does not allow this, since it generates only up convex creep curves).
Due to the monotonic increase in Π(t), function Ψ := Π–1 also increases; therefore, dependence \(t_{*}\)(p) (32) decreases and the convexity of Ψ and \(t_{*}\)(p) down for any MF CR (1) obeying the minimum restrictions (see Section 2) follows from the convexity up and the increase in Π(t). The inverse function
also increases and is convex down. For \(t_{*}\) → ∞, the curve p(\(t_{*}\)) has a horizontal asymptote p = C(q, \(\varepsilon _{*}\))E∞ and the curve \(t_{*}\)(p) has a vertical asymptote p = C(q, \(\varepsilon _{*}\))E∞, to which it tends from the right. If Π(∞) < ∞, E∞ > 0; if Π(∞) = ∞, E∞ = 0 and the asymptote is p = 0. If Π(0) = 0, E = ∞, Ψ(0) = 0, function \(t_{*}\)(p) (32) has the horizontal asymptote \(t_{*}\) = 0 at p → ∞, and function p(\(t_{*}\)) has the vertical asymptote \(t_{*}\) = 0.
For example, for models with an arbitrary φ MF and the creep function
(as in the fractal Maxwell model), we have
and
In particular, for models with a power function of creep Π = Btw (where w ∈ (0: 1], we have E = ∞, E∞ = 0, and \(p_{*}\) = ∞ and the long-term strength curve is described by the relation \(t_{*}\) = \({{({C \mathord{\left/ {\vphantom {C B}} \right. \kern-0em} B})}^{{{1 \mathord{\left/ {\vphantom {1 w}} \right. \kern-0em} w}}}}{{p}^{{{{ - 1} \mathord{\left/ {\vphantom {{ - 1} w}} \right. \kern-0em} w}}}},\) at p > 0 or p = \(C(q,\varepsilon {\text{*)}}{{B}^{{ - 1}}}t_{*}^{{ - w}}\). In this case, the long-term strength curve in the log\(t_{*}\)–logp coordinates is a straight line with a slope w < 0 (this shape of the curve is observed in testing many viscoelastoplastic materials).
In the case p1 – p2 < 0, we have εθ(r, t) < 0 but the time to failure is expressed by the same equation (Eq. (32)), since εr = –εθ due to the incompressibility condition.
6 TIME TO FAILURE FOR THE MEASURE OF DAMAGE EQUAL TO THE STRAIN INTENSITY
If the measure of damage is taken to be the maximum shear strain γmax = (ε1 – ε3)/2 rather than the maximum tensile strain ε1 = εθ, we obtain the same time to failure as in Eq. (32) at the same limiting strain \(\varepsilon _{*}\), since γmax = (ε1 – ε3)/2 = (εθ – εr)/2 = εθ (εz ≡ 0 and εr = –εθ due to the incompressibility condition).
Using another fracture criterion of a deformation type, namely, reaching the limiting strain intensity max {ε(r, t)|r1 ≤ r ≤ r2} = \(\varepsilon _{*}\), we obtain a qualitatively similar result (another time to failure and another long-term strength curve), since strain intensity (15) ε(r, t) = y(t)/\({{\bar {r}}^{2}}\) differs from εθ(r, t) only in constant factor c = 2/\(\sqrt 3 \) and also reaches the maximum value on the inner tube surface, ε(r1, t) = y(t). This criterion gives the equation y(\(t{\text{**}}\)) = \(\varepsilon _{*}\) (c = 1 instead of c = 2/\(\sqrt 3 \) > 1) for the time to failure. Since y(t) increases, \(t{\text{**}}\) < \(t_{*}\) for any MF and p and, instead of Eq. (31), we obtain
where C2(q, \(\varepsilon _{*}\)) is a constant, which is dependent on parameters q, \(\varepsilon _{*}\), and MF φ and is independent of p and crep function Π(t).
Similarly to Eq. (32), we find
Thus, the time to failure as a function of q and \(\varepsilon _{*}\) is different, and dependence (34) is derived from Eq. (32) by tension along axis p with the coefficient k = \({{{{C}_{2}}(q,\varepsilon {\text{*)}}} \mathord{\left/ {\vphantom {{{{C}_{2}}(q,\varepsilon {\text{*)}}} {C(q,\varepsilon {\text{*)}}}}} \right. \kern-0em} {C(q,\varepsilon {\text{*)}}}}\) < 1.
7 LONG-TERM STRENGTH CURVE FOR A MODEL WITH A POWER MATERIAL FUNCTION
We now consider a model with MF φ(x) = Axαsgnx, α > 0, and an arbitrary creep function. Then, according to Eq. (20), we have F(s) = Aα–1sαsgn s and, hence,
that is, the long-term strength curve of type (34) is obtained from Eq. (32) by compression along the pressure axis with coefficient k = C2/C = c–α independent of q and \(\varepsilon _{*}\) (which is true of any homogeneous function φ). For power function φ and an arbitrary creep function, the solution y(t) of Eq. (30) is analytically found,
Its substitution into Eqs. (24)–(26) gives expressions for the displacement and strain fields during creep under a constant pressure. Due to Eq. (36), the creep curves y(t) = ε(r1, t), εθ(r, t), and εr(r, t) are limited in the t ≥ 0 semiaxis only when Π(t) is limited.
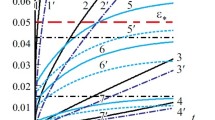
Figure 1 shows the creep curves of a tube with r1/r2 = 0.8 at p = 1, which are generated by CR (1) with MF φ(x) = Axα, where α = 1, 0.7, 0.5, and 0.3 and A = 1, and creep function of type (33) or Π = β – γe–λt (as in Kelvin’s model). These are the strain intensity curves on the inner tube surface ε(r1, t) = y(t), which were calculated using Eq. (36) for eight models of type (33) with parameters w = 0.5, B = 1, and b = 0.5 (curves 1–4 at α = 1, 0.7, 0.5, 0.3) or b = 0 (curves 1 '–4 ') and two models with Π = β – γe–λt, λ = 0.1, β = 1.5, and γ = 1 at α = 1 and 0.7 (curves 1 " and 2 " and dot-and-dash lines are their horizontal asymptote at t → ∞). The straight line at ε = 0.05 is the given level of strain at which fracture occurs, i.e., ε = \(\varepsilon _{*}\). The strain curves εθ(r1, t) differ from the ε(r1, t) curves only in factor \(\sqrt {{3 \mathord{\left/ {\vphantom {3 2}} \right. \kern-0em} 2}} \).

Creep curves of a tube with r1/r2 = 0.8 at p = 1 (strain intensity ε(r1, t) curves) generated by various models (1) with MF φ(x) = Axα, where α = 1, 0.7, 0.5, and 0.3 and A = 1, and a creep function of type (33) or Π = β – γe–λt.
Figure 2 shows long-term strength curves (34) of a tube with r1/r2 = 0.8 for the limiting strain intensity \(\varepsilon _{*}\) = 0.05 and models (1) at α = 1, 0.5, and 0.3, which were used in Fig. 1 (numbering of curves is retained). Curves 1–3 and 1 '–3 ' have a common vertical asymptote p = 0, and curves 1 "–3 " of the models with Π = β – γe–λt have asymptotes p = pmin(q, \(\varepsilon _{*}\), α) and pmin = E∞C2 = \({{\beta }^{{ - 1}}}A{{\alpha }^{{ - 1}}}{{[\varepsilon _{*}^{\alpha } - {{{(q\varepsilon * )}}^{\alpha }}]} \mathord{\left/ {\vphantom {{[\varepsilon _{*}^{\alpha } - {{{(q\varepsilon * )}}^{\alpha }}]} {\sqrt 3 }}} \right. \kern-0em} {\sqrt 3 }}\) > 0 (dashed vertical lines); that is, they simulate materials with a nonzero creep threshold pmin.

Long-term strength of a tube with r1/r2 = 0.8 generated by nine models (1) with MF φ(x) = Axα, where α = 1, 0.5, and 0.3 and A = 1, and a creep function of type (33) or Π = β – γe–λt.
Figure 3 shows coefficient C2 from Eq. (35), which determines the long-term strength of a tube, as a function of parameter α at various tube thicknesses r1/r2 = 0.9, 0.8, 0.7, and 0.6 (curves 1–4). The dashed line illustrates the ratio k(α)/2, k = C2/C = c–α, i.e., coefficient of compression of a curve of type (34) along axis p, to obtain the curve of type (32) generated by the fracture criterion according to the maximum tensile strain ε1 = εθ.

Coefficients C2 and k = C2/C, which determine the long-term strength of the tube, vs. parameters α and r1/r2.
8 CONCLUSIONS
An exact solution is obtained for the problem of creep and fracture of a hollow cylinder made of a physically nonlinear rheonomic material obeying Rabotnov’s CR with two arbitrary material functions under constant internal and external pressures. The displacement, strain, stress fields at any time are expressed in terms of one function of time on the assumption of plane deformation and an incompressible material. This function is found by solving a constructed nonlinear functional equation containing material functions of CR and a given load. A general expression is obtained for the time to failure of a tube \(t_{*}\)(p) in terms of the pressure difference, the material functions of CR, and the ratio of the tube radii. As the measure of damage, we chose the maximum tensile strain, the strain intensity, or the maximum shear strain without constructing a solution to a functional equation, which is important.
Equations of the corresponding long-term strength curves are derived, and their properties are analytically investigated for arbitrary material functions of Rabotnov’s CR. The shape and the main qualitative properties of the curve \(t_{*}\)(p) were proved to be mainly determined by a creep function and to weakly depend on the function that specifies nonlinearity in CR and on the ratio of the tube radii. For all three fracture criteria and any material functions, the dependence \(t_{*}\)(p) was proved to decrease and to be convex down, the times to failure determined according to the criteria of the maximum tensile strain or the maximum shear strain coincide, and the time to failure found according to the strain intensity criterion is always shorter than them (with the same limiting strain).
REFERENCES
L. M. Kachanov, Creep Theory (Fizmatgiz, Moscow, 1960).
Yu. N. Rabotnov, Creep of Structural Elements (Nauka, Moscow, 1966).
N. N. Malinin, Applied Theory of Plasticity and Creep (Mashinostroenie, Moscow, 1968).
N. A. Makhutov, Deformation Criteria of Fracture and Strength Calculations of Structural Elements for Strength (Mashinostroenie, Moscow, 1981).
J. Betten, Creep Mechanics (Springer, Berlin, 2008).
J. S. Bergstrom, Mechanics of Solid Polymers. Theory and Computational Modeling (Elsevier, Amsterdam, 2015).
A. M. Lokoshchenko, Creep and Long-Term Strength of Metals (Fizmatlit, Moscow, 2016).
V. V. Vasiliev and E. V. Morozov, Advanced Mechanics of Composite Materials and Structures. Amsterdam (Elsevier, Amsterdam, 2018).
A. V. Khokhlov, “Fracture criteria under creep with strain history taken into account, and long-term strength modeling,” Mech. Solids 44 (4), 596–607 (2009). https://doi.org/10.3103/S0025654409040104
A. V. Khokhlov, “Long-term strength curves generated by the nonlinear Maxwell-type model for viscoelastoplastic materials and the linear damage rule under step loading,” Vestn. Samar. Gos. Tekh. Univ., Ser. Fiz.-Mat. Nauki, No. 3, 524–543 (2016). https://doi.org/10.14498/vsgtul512
A. V. Khokhlov, “Asymptotic behavior of creep curves in the Rabotnov nonlinear heredity theory under piecewise constant loadings and memory decay conditions,” Moscow Univ. Mech. Bulletin 72 (5), 103–107 (2017). https://doi.org/10.3103/S0027133017050016
A. V. Khokhlov, “Analysis of general properties of creep curves generated by the Rabotnov nonlinear hereditary relation under multi-step loadings,” Vestn. MGTU, Ser. Estestv. Nauki, No. 3, 93–123 (2017). https://doi.org/10.18698/1812-3368-2017-3-93-123
A. V. Khokhlov, “Analysis of properties of ramp stress relaxation curves produced by the Rabotnov non-linear hereditary theory,” Mech. Comp. Mater. 54 (4), 473–486 (2018). https://doi.org/10.1007/s11029-018-9757-1
A. V. Khokhlov, “Simulation of hydrostatic pressure influence on creep curves and Poisson’s ratio of rheonomic materials under tension using the Rabotnov non-linear hereditary relation,” Mekh. Komp. Mater. Konstr. 24 (3), 407–436 (2018). https://doi.org/10.33113/mkmk.ras.2018.24.03.407_436.07
A. V. Khokhlov, “Properties of the set of strain diagrams produced by Rabotnov nonlinear equation for rheonomous materials,” Mech. Solids 54 (3), 384–399 (2019). https://doi.org/10.3103/S002565441902002X
Yu. N. Rabotnov, “Equilibrium of an elastic medium with an aftereffect,” Prikl. Mat. Mekh. 12 (1), 53–62 (1948).
N. N. Dergunov, L. Kh. Papernik, and Yu. N. Rabotnov, “Analysis of the behavior of graphite based on nonlinear hereditary theory,” Prikl. Mekh. Tekh. Fiz., No. 2, 76–82 (1971).
Yu. N. Rabotnov, L. Kh. Papernik, and E. I. Stepanychev, “Application of the nonlinear theory of heredity to the description of the temporal effects in polymer materials,” Mekh. Polimer., No. 1, 74–87 (1971).
Yu. N. Rabotnov, L. Kh. Papernik, and E. I. Stepanychev, “Description of the creep of composite materials during tension and compression,” Mekh. Polimer., No. 5, 779–785 (1973).
Yu. N. Rabotnov, Elements of Hereditary Solid Body Mechanics (Nauka, Moscow, 1977).
A. L. Nadai, Theory of Flow and Fracture of Solids (McGraw-Hill, New York, 1950), Vol. 1.
A. A. Il’yushin and P. M. Ogibalov, Elastic-Plastic Deformation of Hollow Cylinders (Izd. MGU, Moscow, I960).
Y. C. Fung, “Stress-strain history relations of soft tissues in simple elongation,” in Biomechanics, Its Foundations and Objectives (Prentice-Hall, New Jersey, 1972), pp. 181–208.
Y. C. Fung, Biomechanics. Mechanical Properties of Living Tissues (Springer, New York, 1993).
J. R. Funk, G. W. Hall, J. R. Crandall, and W. D. Pilkey, “Linear and quasi-linear viscoelastic characterization of ankle ligaments,” J. Biomech. Eng. 122 (1), 15–22 (2000).
J. J. Sarver, P. S. Robinson, and D. M. Elliott, “Methods for quasi-linear viscoelastic modeling of soft tissue: application to incremental stress-relaxation experiments,” J. Biomech. Eng. 125 (5), 754–758 (2003).
S. D. Abramowitch and S. L.-Y. Woo, “An improved method to analyze the stress relaxation of ligaments following a finite ramp time based on the quasi-linear viscoelastic theory,” J. Biomech. Eng. 126 (1), 92–97 (2004).
A. Nekouzadeh, K. M. Pryse, E. L. Elson, and G. M. Genin, “A simplified approach to quasi-linear viscoelastic modeling,” J. Biomech. 40 (14), 3070–3078 (2007).
L. E. De Frate and G. Li, “The prediction of stress-relaxation of ligaments and tendons using the quasi-linear viscoelastic model,” Biomech. Model. Mechanobiology 6 (4), 245–251 (2007).
S. E. Duenwald, R. Vanderby, and R. S. Lakes, “Constitutive equations for ligament and other soft tissue: evaluation by experiment,” Acta Mechan. 205, 23–33 (2009).
R. S. Lakes, Viscoelastic Materials (Cambridge Univ. Press, Cambridge, 2009).
R. De Pascalis, I. D. Abrahams, and W. J. Parnell, “On nonlinear viscoelastic deformations: a reappraisal of Fung’s quasi-linear viscoelastic model,” Proc. R. Soc., A 470, art. no. 20140058 (2014).
Yu. V. Suvorova and S. I. Alekseeva, “Nonlinear model of an isotropic hereditary medium for the case of a complex stressed state,” Mech. Komp. Mater., No. 5, 602–607 (1993).
Yu. V. Suvorova, “On nonlinear hereditary Rabotnov’s equation and its applications,” Izv. Akad. Nauk SSSR. Mekh. Tverd. Tela, No. 1, 174–181 (2004).
S. I. Alekseeva, M. A. Fronya, and I. V. Viktorova, “Analysis of the viscoelastic properties of polymer composites with carbon nanofillers,” Komp. Nanostr., No. 2, 28–39 (2011).
A. V. Khokhlov, “Two-sided estimates for the relaxation function of the linear theory of heredity via the relaxation curves during the ramp-deformation and the methodology of identification,” Mech. Solids 53 (3), 307–328 (2018). https://doi.org/10.3103/S0025654418070105
Author information
Authors and Affiliations
Corresponding author
Additional information
Translated by K. Shakhlevich
Rights and permissions
About this article

Cite this article
Khokhlov, A.V. Deformation and Long-Term Strength of a Thick-Walled Tube of a Physically Non-Linear Viscoelastic Material under Constant Pressure. Russ. Metall. 2020, 1079–1087 (2020). https://doi.org/10.1134/S0036029520100122
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S0036029520100122