
Abstract
In this paper, we embark on analytical determination of the dynamic buckling of a statically pre-loaded elastic structure subjected to step loading. We first employ a two-timing regular perturbation procedure for asymptotic determination of a uniformly valid expansion of the displacement. The dynamic buckling load is determined nontrivially and is related to the corresponding static load. The dynamic buckling load is studied as a function of various problem parameters: degree of damping, initial imperfection, and static pre-loading.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
INTRODUCTION
Todate, most dynamic buckling investigations normally assume complete absence of any static pre-loading before impartation of any time-dependent load to the structure. Simitses [1, 2] was the first to consider a system, where a dynamic load was superposed on a structure that was statically pre-loaded. Subsequent researchers have tended to approach the subject matter by way of numerical analysis, principally, by way of the finite element technique [3–5]. As it is difficult to apply numerical solutions in engineering practice, it is of interest to consider analytical solutions. Static pre-loading systems have many applications. The approach adopted here is, in part, the technique used in [6], where the maximum displacement and static buckling of a circular cylindrical shell were determined. The same technique and procedure were adopted in [7].
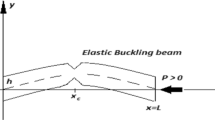
The problem formulation in the present work contains two dimensionally unrelated parameters on which a two-timing multi-scaling perturbation procedure is initiated by using asymptotic expansions. The cubic nonlinear elastic structure under study was first considered in [8]; it describes the behavior of various mechanical structures, such as columns, beams, rods, plates, cylindrical and toroidal shells, etc.

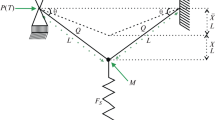
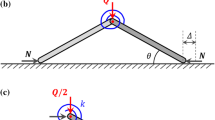
Cubic model structure.
1. FORMULATION OF THE CUBIC MODEL OF THE ELASTIC STRUCTURE
The structure consists of two rods, each of length \(L\)(Fig. 1). The rods are suddenly loaded by a horizontal force \(P(T)\) applied at the time \(T= 0\). The rods are assumed to be absolutely rigid and weightless. A mass \(M\) is attached to the rods at the point of their intersection. The mass motion in the vertical direction is limited by a spring whose rigidity follows a cubic law. From the side of the spring, the mass is affected by the reaction force
(\(X\) is the additional displacement with respect to the equilibrium position).
Let \(Q\) be the force in each rod and \(\theta\) be the angle between the rod and the horizontal line (see Fig. 1). The angle \(\theta\) is assumed to be small; therefore, \(\cos\theta\approx 1\) and \(\sin\theta\approx\theta\). Then we assume that \(\sin\theta = (\bar{X}+X)/L\) and \(\theta =(\bar{X}+X)/L\). The projection of the equilibrium equation for the rod onto the horizontal axis is written as
The equation of motion of the mass \(M\) in the vertical direction has the form
Combining Eqs. (1.1) and (1.2), we obtain
We introduce the dimensional variables
and assume that
Substituting Eqs. (1.4) into Eq. (1.3) and taking into account Eqs. (1.5), we obtain
The initial conditions are written in the form
Equation (1.6) is written with the damping element being ignored. On incorporating a small viscous damping term of the order of \(\delta\), Eq. (1.6) takes the form
where \(0<\delta <1\).
According to [8], the equations of the cubic model (see Fig. 1), which describes the behavior of the elastic structure, are
If a small viscous damping term of the order of \(\delta\) is taken into account in Eq. (1.7), this equation takes the form
where \(0 < \delta < 1\) is the damping coefficient, \(b > 0\) is the imperfection sensitivity parameter, \(\bar{\xi}\) is the amplitude of imperfection, \(f(t)\) is the load function, and \(\lambda\) is the dimensionless magnitude of the dynamic step load (\(\lambda_0\) corresponds to static pre-loading and \(\lambda\) corresponds to the dynamic load).
The step load \(f(t)\) satisfies the condition
In our study, we are to determine a particular value \(\lambda _D\) of the parameter \(\lambda\) at which the structure buckles dynamically under the condition that the structure was pre-loaded at the level \(\lambda _0\). According to [8], the value of \(\lambda _D\) is defined as the greatest value of \(\lambda\) at which the displacement remains bounded.
2. STATIC DEFORMATION
According to Eq. (1.8), the static displacement \(\xi_0\) corresponding to the load \(\lambda_0\) is the solution of the equation
Equation (2.1) is obtained from Eq. (1.8) by assuming that \(f(t)= 1\) and neglecting the terms corresponding to inertial and damping forces.
Let
Substituting Eq. (2.2) into Eq. (2.1) and equating the coefficients at the terms \(\bar {\xi }^i\)(\(i = 1, 2, 3, \dots\)), we obtain the system of equations
whose solution has the form
Therefore, the displacement \(\xi _0\) is written as
To determine the static buckling load \(\lambda _S\), we use the notation \(\lambda\) instead of \(\lambda _0\).
The bifurcation condition for static buckling is
Recasting Eq. (2.5) yields
Following [7, 9], Eq. (2.7) is reversed as
Substituting the expression for \(\xi _0\) from Eq. (2.7) into Eq. (2.8) and equating the coefficients at the powers of \(\bar {\xi }\), we obtain
As \(d_1\) and \(d_3\) depend on \(\lambda\), Eq. (2.6) with allowance for Eq. (2.9) yields
Transforming Eq. (2.10) with allowance for Eqs. (2.4) and (2.9), we obtain
3. DYNAMIC DEFORMATION
For a viscously damped structure that was not statically pre-loaded, its equation of motion under the action of a step load is
where \(\xi (t)\) is the displacement produced explicitly by the step load (i.e., without static pre-loading).
If the structure was statically pre-loaded by the force \(\lambda_0\), the total displacement \(\eta (t)\) is presented as the sum
and the equation of motion is written as
Substituting Eq. (3.1) into Eq. (3.2), we obtain
whence it follows that
At \(\xi _0 = 0\), Eq. (3.3) is the equation of motion under the action of the step load without static pre-loading; at \(\xi _0 \ne 0\), it is the equation of motion of the statically pre-loaded system under the action of the step load.
4. PERTURBATION METHOD AND ASYMPTOTIC SOLUTION
Problem (3.3) contains two small independent parameters \(\delta\) and \(\bar {\xi }\). Let
Then, we have
Therefore,
where the comma in the subscript means partial differentiation, and \(d\,(\,\cdot\,)/d\tau=(\,\cdot\,)'\). Now we assume that
where (\(ij\)) is the superscript rather than the power exponent.
Substituting Eq. (4.2) into Eq. (3.3), we divide the resultant equation by \(1 - \lambda\) and substitute presentation (4.3). In the resultant equation, we equate the coefficients at the powers \(\bar {\xi }^i\delta ^j\)(\(i =1,2,3,\dots\); \(j = 0,1,2,\dots\)). As a result, we obtain the following system of equations:
[3]
etc.
The initial conditions are obtained with the use of the first equation in system (4.2) at \(\hat {t} =\tau = 0\) and with allowance for Eq. (4.3):
etc.
The solution of the first equation in system (4.4) with allowance for the first initial condition in system (4.9) is written as
Substitution of this solution into the second equation of system (4.4) yields
To ensure a uniformly valid asymptotic solution in the time scale \(\hat{t}\), we equate the coefficients at \(\cos \hat {t}\) and \(\sin \hat {t}\) in system (4.12) to zero. Thus, we obtain
Equations (4.13) and (4.11) yield
Therefore, we have
Substituting Eq. (4.14) into the second equation of system (4.4), we obtain
With the use of Eqs. (4.14) and (4.15), the third equation of system (4.4) yields
To ensure a uniformly valid asymptotic solution in the time scale \(\hat{t}\), we equate the coefficients at \(\cos \hat {t}\) and \(\sin \hat {t}\) in the right side of equality (4.16) to zero. As a result, we have
Solving system (4.17) with the initial conditions (4.15), we find
Therefore, we have
Substituting Eq. (4.18) into the third equation of system (4.4), we obtain
The fourth equation of system (4.4) and Eq. (4.5) yield
It should be noted that
Taking into account Eq. (4.19), we write Eq. (4.6) in the form
To ensure a uniformly valid asymptotic solution in the time scale \(\hat{t}\), we equate the coefficients at \(\cos \hat {t}\) in the right side of Eq. (4.20) to zero. Thus, we have
Taking into account Eq. (4.21) similar to Eq. (4.20), we obtain the following expression from Eq. (4.6):
It should be noted that
With allowance for Eq. (4.22), Eq. (4.7) is written as
To ensure a uniformly valid asymptotic solution in the time scale \(\hat {t}\), we equate the coefficients at \(\cos \hat {t}\) in the right side of Eq. (4.23) to zero. Thus, we have
Solving system (4.24), we obtain
The solution of Eq. (4.7) with allowance for Eq. (4.23) is written as
Let us calculate some terms in the right side of Eq. (4.8):
With allowance for Eq. (4.25), Eq. (4.8) is written as
To ensure a uniformly valid asymptotic solution in the time scale \(\hat{t}\), we equate the coefficients at \(\cos \hat{t}\) in the right side of Eq. (4.26) to zero. Thus, we obtain
It follows from Eqs. (4.27) that
With allowance for Eq. (4.26), the solution of Eq. (4.8) is written as
Continuing the calculations, we obtain the expression for the displacement \(\xi (\hat {t},\tau )\):
5. MAXIMUM DISPLACEMENT
The dynamic load \(\lambda _D\) is determined from the condition
where \(\xi_a\) is the value of \(\xi\) at which \(\lambda\) reaches the maximum value.
Let \(\hat {t}_a\), \(t_{a}\), and \(\tau _a\) be the critical values of \(\hat {t}\), \(t\), and \(\tau\), respectively. The following asymptotic series are assumed to be valid:
For the maximum displacement, with allowance for Eq. (4.2), we have
Substituting Eq. (4.28) into Eq. (5.3), using Eq. (5.2), and equating, after some transformations, the coefficients at \(\varepsilon ^i\delta ^j\)(\(i =1,2,3,\dots\), \(j = 1,2,3,\dots\)), we obtain the following system of equations:
Substituting \(\zeta _{,\hat {t}}^{10}\) from Eq. (4.14) into the first equation of system (5.4) and applying some simplifications, we obtain
therefore,
In Eq. (5.6), \(\hat {t}_0\) is the least nontrivial solution.
It follows from the second equation of system (5.4) that
therefore,
Similarly, it follows from the third equation of system (5.4) that
therefore,
The first equation of system (5.5) yields
Simplifying the second equation of system (5.5), we obtain
therefore,
Now we determine the maximum displacement (critical value) \(\xi _a\). Taking into account Eq. (4.28), we obtain
where
Expanding each term in Eq. (5.7) into the Taylor series and applying some transformations, we obtain
The expressions for the terms in Eq. (5.8) can be simplified:
Substituting Eq. (5.9) into Eq. (5.8) and applying some simplifications, we obtain
where
Equation (5.10) is similar to that from which we earlier derived Eq. (2.10); therefore, we expect the dynamic buckling load to be obtained as
It follows from Eq. (5.11) with allowance for Eq. (5.10) that
Dividing Eq. (5.12) by Eq. (2.11), we obtain the relation between the dynamic buckling load \(\lambda _D\) and static buckling load \(\lambda _S\):
Thus, if either \(\lambda _D\) or \(\lambda _S\) is known, one can determine the other load without the labor of repeating the arduous task all over. If the structure is undamped, but is stressed by a step load superposed on the static pre-load, the dynamic buckling load is calculated by Eqs. (5.12) and (5.13) as
If there was no static pre-load, then \(\xi _0 =\xi _0^{(i)} = 0\)(\(i = 1,2,3,\dots\,\)), and Eq. (5.14) yields
Formula (5.15) was first derived in [8] by using the phase plane analysis. Formulas (5.12) and (5.13) are valid for \(0 < \varepsilon \ll 1\) and \(0 < \delta \ll 1\).

Dynamic buckling load \(\lambda _D\) versus the imperfection parameter \(\bar {\xi }\) calculated by Eq. (5.12) for different values of \(\xi _0\) and \(\delta\): (1) \(\xi_0=0\) and \(\delta=0\); (2) \(\xi_0=0\) and \(\delta=0.02\); (3) \(\xi_0\neq 0\) and \(\delta=0\); (4) \(\xi_0\neq 0\) and \(\delta=0.02\).

Dynamic buckling load \(\lambda _D\) versus the static buckling load \(\lambda _S\) calculated by Eq. (5.13) for different values of \(\xi _0\) and \(\delta\)(notation the same as in Fig. 2).

Dynamic buckling load \(\lambda _D\) versus the damping coefficient \(\delta\) for \(\bar {\xi } = 0.04\) and different values of \(\xi _0\) and \(\lambda _0\): (1) \(\xi_0=0\) and \(\lambda_0=0\); (2) \(\xi_0=0\) and \(\lambda_0=0.02\); (3) \(\xi_0\neq 0\) and \(\lambda_0=0\); (4) \(\xi_0\neq 0\) and \(\lambda_0=0.02\).
6. ANALYSIS OF RESULTS
The dynamic buckling load was calculated within the framework of the MATLAB software system. The relations between the dynamic buckling load \(\lambda _D\) and various parameters of the problem are shown in Figs. 2–4. In the case of static pre-loading, the dynamic buckling load\(\lambda _D\) is greater than that in the case without pre-loading. The value of \(\lambda _D\) increases with increasing damping and decreases with increasing initial imperfection \(\bar{\xi}\).
CONCLUSIONS
The problem of dynamic buckling of the structure is analyzed with the use of the perturbation procedures and asymptotic expansion in two small parameters. All the results are asymptotic in nature. Though the results are obtained for a nonlinear cubic model elastic structure, the proposed method can be extended to real-life elastic structures, such as toroidal, cylindrical, and spherical shells. Structures with nonlinear damping can be also investigated by using this perturbation procedure.
REFERENCES
G. J. Simitses, “Effect of Preloading on the Dynamic Stability of Structures," AIAA J. 12 (8), 1174–1180 (1983).
G. J. Simitses, Dynamic Stability of Suddenly Loaded Structures (Springer, New York,1990).
R. Tanov and A. Tabiei, Static and Dynamic Buckling of Laminated Composite Shells (Univ. of Cincinati, Cincinati, 1998).
A. Tabiei, R. Tanov, and G. J. Simitses, “Numerical Simulation by Cylindrical Laminated Shells under Impulse Lateral Pressure," AIAA J. 37, 629–633 (1999).
R. Tanov, A. Tabiei, and G. J. Simitses, “Effect of Static Pre-Loading on the Dynamic Buckling of Laminated Cylinder under Sudden Pressure," Mech. Compos. Mater. Struct. 6, 195–206 (1999).
G. E. Ozoigbo and A. M. Ette, “On the Maximum Displacement and Static Buckling of Circular Cylindrical Shell," J. Appl. Math. Phys. 7, 2868–2882 (2019).
B. Budiansky, “Dynamic Buckling of Elastic Structures: Criteria and Estimation," in Dynamic Stabilities of Structures (Pergamon Press, Oxford, 1966), pp. 83–106.
B. Budiansky and J. W. Hutchinson, “Dynamic Buckling of Imperfection Sensitive Structures," in Proc. of the 11th Int. Congress of Applied Mechanics, Munich (Germany), 1964(Springer-Verlag, Berlin–Heidelberg–New York, 1966), pp. 635–651.
J. W. Hutchinson and B. Budiansky, “Dynamic Buckling Estimates," AIAA J. 4, 525–530 (1966).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Ozoigbo, G.E., Ette, A.M. PERTURBATION APPROACH TO DYNAMIC BUCKLING OF A STATICALLY PRE-LOADED, BUT VISCOUSLY DAMPED ELASTIC STRUCTURE. J Appl Mech Tech Phy 61, 1001–1015 (2020). https://doi.org/10.1134/S0021894420060140
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S0021894420060140