
Abstract
Two variants of automatic correction of temperature variations of a constant magnetic field in the system of a permanent magnet NMR relaxometer are described. In the first version, the magnetic flux correction in the magnetic circuit of the system is used with a magnetic shunt, which is moved by a stepping motor. In the second version, the field is corrected by the current in the coils placed on the magnetic circuit of the magnetic system. Correction of the field is carried out automatically during the tuning of the resonant frequency of the device. The proposed methods make it possible to correct the relative change in the magnetic field within 1%, which covers possible temperature variations of the magnetic field in the entire range of room temperatures when using magnets based on neodymium–iron–boron and samarium–cobalt alloys (NdFeB and SmCo).
Similar content being viewed by others

Avoid common mistakes on your manuscript.
INTRODUCTION
Permanent magnet systems (MSs) are widely used in nuclear magnetic resonance (NMR) spectrometry in relatively low fields with a magnetic induction of up to 2 T [1, 2]. Unlike systems based on electromagnets and superconducting solenoids, such MSs do not require powerful power supplies or cooling to low temperatures for operation, they are relatively simple and do not require maintenance. The main magnetic materials currently used to fabricate MCs are neodymium–iron–boron and samarium–cobalt alloys (NdFeB and SmCo). At the same time, the NdFeB alloy is in the most demand, since it has a high residual induction (up to 1.45 T), a high coercive force (~1000 kA/m) and a significantly lower price compared to SmCo. However, the temperature coefficient of induction, which determines how strongly the magnetic induction depends on temperature, is approximately 3 times higher for the NdFeB alloy than for the SmCo-based alloys. In turn, the temperature dependence of the magnetic induction leads to instability of both the magnetic field strength in the working area of the MS and the operating frequency (Larmor frequency). The stability of the operating frequency is one of the main parameters that determine the signal-to-noise ratio and the sensitivity of the device. Since the Larmor frequency is uniquely determined by the magnetic field strength, the field stability is one of the main parameters of the device.
The traditional way to maintain the stability of the Larmor frequency in NMR devices is temperature stabilization of the magnet [3]. Although the automatic temperature stabilization of the MS is not a significant problem with the current state of electronics, its disadvantage is the time factor. For convenience of automatic stabilization, the MS temperature is usually kept above room temperature, i.e., at the level of 30–40°С, and before starting work, the temperature of the magnet in the device must be brought to the specified operating level. This usually takes 1–1.5 h. In addition, the temperature stabilization device requires the installation of a heater and fans, which leads to additional power consumption and an increase in the size of the device. Therefore, one attractive approach is to maintain a stable magnetic field in the system with minimum energy consumption.
Usually, the magnetic system of an NMR relaxometer, in addition to permanent magnets, includes a magnetic circuit made of soft magnetic iron, which makes it possible to regulate the magnetic field strength in the working volume of the MS by changing the parameters of the magnetic circuit, i.e., a change in the magnetic state of the magnetic circuit. Such adjustment can be carried out using magnetic shunts, which can be thermomagnetic shunts [4], magnetic shunts based on moving permanent magnets, or magnetically soft elements [5]. In addition, adjustment can be made using current coils. This paper shows the possibility of automatic tuning of the Larmor frequency by changing the magnetic state of the MS magnetic circuit using a mechanical magnetic shunt or current coils.
MATERIALS AND METHODS
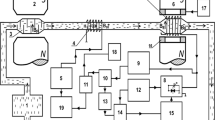
In this work, we used a proprietary pulse NMR relaxometer. The device allows measurements using the most common pulse sequences and has a fully digital path, which consists of the following main blocks: an analog-to-digital converter, a quadrature detector, digital filters, a pulse programmer, and a frequency synthesizer. The basis of the relaxometer is the XILINX XC6SLX9 programmable logic integrated circuit (FPGA), whose firmware implements the above main circuits and units of the digital path. The firmware is implemented using the VHDL language. A simplified block diagram of the device is shown in Fig. 1.

A simplified block diagram of the electronic system of the NMR relaxometer. ADC, analog-to-digital converter; LPF, low pass filter; SM, stepper motor; PWM , pulse width modulation; PC, Personal Computer.
The received and amplified signal from the sample is digitized and fed to a digital quadrature detector, in which the signal is multiplied with two digital sequences corresponding to two harmonic signals of the reference frequency, shifted by 90°. At the output of the quadrature detector after the necessary filtering with low-pass filters LPF two digital sequences are formed corresponding to the real and imaginary parts of the input NMR signal. The rate of change of the phase of this complex signal is the deviation of the Larmor frequency from the required tuning frequency, which is equal to the frequency of the reference signal. It is known that the frequency of NMR resonance is directly proportional to the magnitude of the magnetic field. Therefore, the calculated frequency deviation can be used as an error signal for generating control actions when correcting the magnetic field. The frequency shift is calculated by the relaxometer control program. It also calculates the required number of steps of a stepper motor based on the previously obtained dependences of the change in the magnetic field on the angle of rotation of the rotor or the current of the coils SM or pulse width modulation PWM to set the required current to minimize the deviation of the magnetic field from the specified one.
During the test measurements when registering NMR on protons, an aqueous solution of copper sulfate with a relaxation time T2 = 60 ms was used at room temperature.
RESULTS AND DISCUSSION
Compensating for Magnetic Field Variations with a Magnetic Shunt
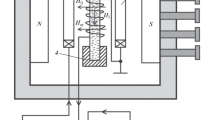
The use of a magnetic shunt can be effective in compact magnetic systems used, for example, in chemical and biological research, where it is required to work with small-volume samples. A schematic representation of the proposed MS version for biological research with a magnetic shunt is shown in Fig. 2.

A schematic diagram of the magnetic system of an NMR relaxometer with magnetic shunts. 1, magnets; 2, magnetic circuit; 3, pole pieces; 4, elements of the magnetic shunt; 5, gear wheels; 6, stepper motor; 7, shaft with gears transmitting rotation.
The required magnetic field strength in the working gap of the system is provided by two permanent magnets. To increase the stability of the magnetic field, magnets from the Sm2Co17 alloy were used, whose temperature coefficient of induction is α = 0.035%/K. The stabilization of the magnetic field in the MS is provided by two rotary magnetic shunts in the form of two circular segments made of soft magnetic iron plates. The plates are fixed in the grooves of a gear wheel made of nonmagnetic material, as shown in Fig. 2. The gap between the plates is fixed and equal to the thickness of the magnet. When the wheel rotates, the position of the plates relative to the magnet poles changes, which leads to a change in the magnetic flux through the MS working gap. The maximum magnetic field strength in the working area of the system occurs when the long side of the gap between the shunt plates is parallel to the plane of the magnets, and the minimum side when it is perpendicular. The magnitude of the field change in the working gap depends on the thickness of the shunt plates and can be selected based on the MS parameters
The rotation of the magnetic shunt is carried out by a stepping motor. All parts of the shunt movement mechanism (gear wheel for attaching magnetic shunt elements, rotation axis, gear on a stepper motor) are made of plastic by 3D printing.
In the process of automatic tuning of the NMR equipment, a tuning measurement takes place, during which an error signal is generated that is proportional to the difference between the frequency of the Larmor signal and the frequency of the reference source, which in turn is equal to the tuning frequency LC- NMR sensor circuit Based on this error signal, the equipment generates stepping motor control pulses. Knowing the dependence of the magnetic field strength on the angle of rotation (Fig. 3) and the angle of rotation, which corresponds to one step of the stepping motor, the number of steps required to rotate the magnetic shunt in such a way as to compensate for the error is calculated.

The relative change in the magnetic field strength in the working area of the MS, depending on the angle of rotation of the shunt.
Adjustment measurements can be repeated if necessary in order to further reduce the adjustment error.
In the experimental magnetic system of the NMR relaxometer, we used two permanent magnets made of an Sm2Co17 section 50 × 30 mm2 and 10 mm thick. The iron pole pieces had a cross section of 50 × 50 mm2 and the size of the working gap was 15 mm. The plates of the magnetic shunts had the shape of a circular segment with a chord length of 50 mm and a thickness of 0.5 mm, the distance between the magnet surface and the shunt was 2 mm, and the gap between the shunt plates was 10 mm. The NMR tuning frequency is ~8 MHz. The working volume size had a diameter of 8 mm and a height of 8 mm. The relative inhomogeneity of the magnetic field ΔH/H in the working volume did not exceed 10–3.
Figure 3 shows the relative dependence of the change in the magnetic field in the working area of the manufactured MS on the angle of rotation of the magnetic shunts. The change in the magnetic field strength in the working gap when the magnetic shunts were turned from 0° to 90° was 1% of the initial magnetic field strength. This provided the stabilization of the field in the temperature range from 15 to 45°С, i.e., over the entire possible range of room temperature changes. The field was corrected by rotating the shunt plates within a few seconds. The accuracy of maintaining the field (frequency) value is set before the adjustment measurement. This preset value determines the number of iterations required. The minimum possible value of the specified error is determined by the signal-to-noise ratio.
To provide the same range of field adjustment when using magnets based on NdFeB alloy with a temperature coefficient of induction of 0.12%/K, it is sufficient to increase the thickness magnetic shunt plates.
It should be noted that due to the presence of moving parts the proposed method for stabilizing the magnetic field is convenient only for compact magnetic systems.
Compensating for Magnetic Field Variations with Current Coils
In magnetic systems with a magnetic core, current coils placed on the magnetic core can be used to correct the magnetic field strength in the working area of the MS. A diagram (cross-section) of a variant of such an MS is shown in Fig. 4. For the type of MS under consideration, the elements of the magnetic circuit on which the coils are installed are in a state far from magnetic saturation. This allows one to change the magnetic flux with sufficiently small currents. Coils with current allow one to both decrease and increase the magnetic flux in the magnetic circuit by changing the direction of the current. However, as a rule, this requires the use of bridge power circuits. Therefore, to simplify the circuitry, a unipolar power supply circuit for the coils was developed using PWM. For such a circuit, one transistor switch is sufficient (Fig. 5). In this case, the coils were connected in such a way that an increase in the current led to a decrease in the magnetic field in the working area. With this approach, the initial tuning of the resonance was carried out at a current in the coil equal to j = jmax/2, where jmax is the maximum current that the used correction circuit allows to pass through the coil.

A diagram (cross-section) of the magnetic system of an NMR relaxometer with current coils to compensate for changes in the magnetic field. L1, L2-correcting coils.

The current regulator circuit in coils.
The proposed correction system was implemented operating at a frequency f = 2.05 MHz (field ~ 481 Oe) to the magnetic system of NMR relaxometers for the study of cores. The distance between the poles of the system is 70 mm; the maximum size of the investigated cores had a diameter of 42 mm and a height of 55 mm. The relative inhomogeneity of the magnetic field ΔH/H in the working volume did not exceed 10–3. Correction coils had the following parameters: section 160 × 8 mm2, number of turns N = 100, and current jmax = 3 A.
Figure 6 shows the results of measurements of the relative change in the magnetic field strength depending on the current of the correcting coil. The scheme made it possible to compensate for the change in the magnetic field in the working gap within 1% (4.8 Oe), i.e., it provides field stability in the range of room temperatures from 15° to 45° in MS with magnets based on the Sm2Co17 alloy.

The relative change in the magnetic field strength in the working area of the MS, depending on the current of the correcting coil.
Figure 7 shows the results of measuring the frequency dependence of the amplitude of the echo signal at different currents in the correcting coils and the amplitude–frequency characteristic of the resonant circuit of the NMR signal sensor. The echo amplitude decreases; by changing the current in the correcting coils, this inaccuracy of the setting can be eliminated. In the case of using magnets based on NdFeB alloy, the number of turns in the compensating coils can be increased at the same maximum current.

The dependences of the echo signal module on the frequency at various currents of the correcting coil, A: 0 (1), 1.5 (2), 3.0 (3).
Coil current regulation is carried out automatically during operation. During the preliminary (tuning) measurement, the NMR relaxometer generates an error signal proportional to the deviation of the Larmor precession frequency from the tuning frequency of the measuring cell. Based on the error signal, knowing the dependence of the magnetic field strength on the current of the correcting coil (Fig. 6), the pulse duration PWM is calculated that is required to change the current of the coils and, accordingly, the magnetic field in the working gap of the magnetic system in such a way as to compensate for the tuning error due to changes in the ambient temperature.
Adjustment measurements can be repeated if necessary in order to further reduce the adjustment error. The number of iterations depends on the signal-to-noise ratio and the specified permissible error of the target frequency (field). When the signal-to-noise ratio is more than 100, 1 or 2 iterations are usually sufficient with an acceptable error of 50 Hz, which is common for relaxometry. In addition, no deterioration in the uniformity of the magnetic field was detected experimentally when it was adjusted for both designs of magnetic systems.
CONCLUSIONS
The results of this work showed that the use of both a mechanically movable magnetic shunt made of soft magnetic elements and coils with current provides the necessary stabilization of the NMR operating frequency over the entire range of operating room temperatures. Thus, the considered schemes for stabilizing the magnetic field can be used in compact magnetic systems of NMR relaxometers and spectrometers.
REFERENCES
Mitchell, J., Gladden, L.F., Chandrasekera, T.C., and Fordham, E.J., Prog. Nucl. Magn. Reson. Spectrosc., 2014, vol. 76, p. 1. https://doi.org/10.1016/j.pnmrs.2013.09.001
Casanova, F., Perlo, J., and Blumich, B., Single-Sided NMR, Berlin, Heidelberg: Springer, 2011.
Evans, B.A. and Richards, R.E., J. Sci. Instrum., 1960, vol. 37, p. 353.
Kolesnikov, S.V., Nokhrin, V.P., Sobyanin, V.G., and Sivogrivov, P.F., RF Minor Patent RU88199, Byull. Izobret., 2009, no. 30.
Mysik, A.A., Byzov, I.V., Uimin, M.A., Ermakov, A.E., Raev, M.B., and Khramtsov, P.V., RF Patent RU2691753, Byull. Izobret., 2019, no. 17.
Funding
The work was carried out within the framework of the state assignment on the Magnet topic by G.R. AAAA-A18-118020290129-5.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Mysik, A.A., Byzov, I.V. & Zhakov, S.V. Thermostabilization of the Frequency of a Proton Relaxometer Based on Nuclear Magnetic Resonance with a Magnetic System on Permanent Magnets. Instrum Exp Tech 64, 855–859 (2021). https://doi.org/10.1134/S0020441221060099
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S0020441221060099