
Abstract
The necessity to develop a magnetometer for variations research in the mid-field magnetic strength with a relative error of 10–6 is justified. A new design of nuclear magnetometer which uses maser with flowing liquid is proposed. The block diagram of the magnetometer is presented, and the principle of its operation is described in detail. Furthermore, the conditions of occurrence of maser generation are established. The measurement errors of magnetic field variations in the developed magnetometer design are calculated. The capabilities of the developed magnetometer are determined. Finally, the results of experimental investigations of various variations of magnetic fields are presented.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In the modern world, data on the magnetic field characteristics are in demand in many areas of science and technology [1,2,3,4]. In most cases, it is necessary to control of magnetic field parameters with high accuracy, especially when working in Earth's field or low fields with induction up to 0.1 mT. These problems are successfully solved using the quantum magnetometers on based of nuclear magnetic resonance (NMR), which are highly accurate in measuring magnetic field variations [5,6,7,8,9,10]. That is why, they are actively used in biology and medicine, for example [11,12,13]. There are several types of quantum NMR magnetometers. The most widely used magnetometers are based on a nuclear resonance filter [1, 9, 14,15,16] with a phase or frequency self-tuning of the external generator frequency to the frequency of the passive NMR line and the spin generator [5, 7, 11, 17, 18]. The first one has high requirements for the tracking system due to the very narrow NMR line. This creates several measurement problems. For example, significant dynamic errors occur in case of temperature variations. During measuring of large magnetic field variations using a spin generator, there are difficulties with self-tuning. This is especially true if measurements are performed under conditions of temperature fluctuations. For stable operation of the spin oscillator in this case, a thermal stabilization circuit is required. Consequently, this significantly complicates the magnetometer design and increases the probability of parasitic self-excitation of the generator during frequency tuning. Therefore, the upper limit of magnetic field induction measurement in most models of industrial quantum NMR magnetometers is 100 μT [8, 15, 16, 18,19,20]. To solve special tasks, laboratory versions of quantum NMR magnetometers with an upper measurement limit of up to 200 μT have been developed. These values of magnetic field induction B refer to low magnetic fields. The commissioning of new particle accelerators and tokamaks for research, the development of magnetic starting mechanisms for high-speed objects, new tasks for determining the coordinates of an underwater object at a depth with a remanent magnetization of 12 mT, and much more have determined the need to control the magnetic field parameters in the range from 0.2 to 200 mT with a relative measurement error no worse than 10–6.
Currently, mainly the Hall effect magnetometers are used to measure mid-field magnetic strength (0.2 mT < B < 1000 mT). This magnetometer had a higher measurement error than quantum ones. For example, one of the best magnetic induction meters DX-180 has a relative measurement error of 5 · (10–5 \(\div\) 10–4) in the measurement range from 10–5 to 0.3 T with a resolution of 10 \(\div\) 100 nT. Therefore, the development of a new design of a magnetometer for measuring variations with a relative error no worse than 10–6 is extremely urgent.
2 Design of a Nuclear Magnetometer Based on a Maser With a Flowing Liquid and a Technique for Measuring Magnetic Field Variations
At present, only one paper [21] on this topic has been published in the open press. In this paper, a scheme for self-tuning to the NMR frequency of the receiving circuit resonant frequency of a maser with a flowing liquid is considered. It should be noted that [21] does not present the design of the maser with a description of its main elements. The article generally discusses maser generation and the possibility of using it to measure the parameters of the magnetic field. Only the processing scheme of the recorded NMR signal is considered in detail. This is not enough to reproduce the design of the magnetometer and implement maser generation in it.
In addition, electronic circuits on a different element base are currently used to record and process NMR signals. This has significantly changed the schemes of NMR signal registration and processing, as well as the design of the NMR magnetometers themselves. Therefore, the presented article gives a detailed description of the structural diagram of the magnetometer developed by us based on a maser with a flowing liquid, with automatic tuning of the generation zone center to the NMR frequency.
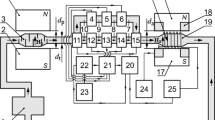
Figure 1 shows the block diagram of the developed magnetometer. In its development, the data on the Benoit maser [22] were used, and the results of research presented in [23] were also considered. In the developed magnetometer, a 20% solution of filtered tap water with ethyl alcohol C2H5OH is used as a liquid.

Block diagram of a nuclear magnetic magnetometer. Magnetometer consists of a centrifugal pump (1), polarizer magnet (2), polarizer vessel (3), pulse inversion coil of water proton magnetization (4), radiofrequency generator (5), electromagnet (6), measuring sensor (7), receiving circuit (8), regenerator (9), resonance amplifier (10), registration device (11), low-frequency generator (12), low-frequency amplifier (13), synchronous detector (14), control circuit (15), excitation coils (16), pulse radiofrequency generator (17), oscilloscope (18), and frequency meter (19)
Centrifugal pump 1 provides the flow rate q from 0 to 20 ml/s. The aqueous solution is magnetized in a polarizer vessel 3 placed in a polarizer magnet 2 with an induction Bp = 1.25 T. To obtain the full magnetization of the solution at the output of the polarizer magnet 2, the following ratio must be satisfied:
where Vp is the volume of polarizer vessel 3, q is liquid flow rate, and T1 is the longitudinal relaxation time of liquid.
At a temperature T = 273.2 K, the value of T1 is 2.06 s. With a change in T, the value of T1 changes. Therefore, in the design of the magnetometer, the value of Vp was chosen to ensure the fulfillment of (1) when the temperature T changes in the range from 263 to 288 K and the flow rate q changes several times.
In addition, it is also necessary to take into account the process of magnetization relaxation when the liquid flows from 2 to the measuring sensor 7. To ensure a high signal-to-noise ratio of the recorded NMR signal, it is necessary to ensure that the flow time of the liquid is less than 2T1. This is provided by the parameters of the pipeline (length and diameter) and the value of q (1).
With the help of generator 5, inversion coil 4 creates inverse population of the flowing liquid [24,25,26]. Magnetization inversion in coils 4 is obtained when the following condition is met:
where Vin is the volume of the inversion coil 4 and H1 is the field strength created by the generator 5 in the inversion coil 4 (Fig. 1).
The amplitude of the sine wave from the generator 5 to the inversion coil 4 is chosen, so that the pulse condition (2) at a given interval of change q is satisfied.
In this case, the amplitude of the recorded inverted NMR signal will be maximum. Inversion coil 4 is placed in a magnetic field B0 (Fig. 1). The magnetization inversion will be done when the frequency ωg of the sinusoidal oscillation from generator 5 will coincide with the frequency ω0, which is defined by the following relation:
where γ is the gyromagnetic ratio of protons.
Therefore, the inversion coil 4 can be placed in various places in the pipeline between 2 and 7. By changing the frequency ωg, the inversion of the magnetization is achieved at different values of B0. However, there are two limitations. The field of the inversion coil 4 must not affect the field in the measurement sensor 7. Therefore, it is recommended to place the inversion coil 4 at 15 cm or more from the measurement sensor 7. It is also not recommended to place the inversion coil 4 next to the polarizer magnet 2. In this case, high inhomogeneity of the magnetic field B0 from the scattered magnetic field Bp will decrease the amplitude of the registered NMR signal with magnetization inversion. That is why, the inversion coil 4 in the considered magnetometer design is located at a distance of 25 cm from the polarizer magnet 2. This is enough to obtain the maximum amplitude of the NMR signal with magnetization inversion. This distance can be reduced by placing a magnetic screen between the polarizer magnet 2 and the inversion coil 4. This is used in NMR flowmeters with markers if there are severe limitations on the size of the device.
The magnetic moments of protons with inversion of magnetization (negative magnetization) enter the measuring sensor 7, located in the electromagnet 6 with induction BE. This induction can have values from 0 to 0.23 T. To measure magnetic field variations in the range from 0.0002 to 0.2 T, the developed magnetometer uses 26 measuring sensors. These are replaceable sensors. During operation of the magnetometer, only one sensor is used for measurements. Other sensors are disabled. Let us consider the operation of a magnetometer with one of them designed to measure magnetic field variations in the range 0.060 ± 0.013 T. Measuring sensor 7 is a coil of 40 turns of copper wire with a winding length of 3 mm and filling factor η = 0.2. The intrinsic quality factor of the receiving circuit, which includes the coil of the measuring sensor 7, at the NMR frequency fnmr = 2.5 MHz has a value of more than 30. The receiving circuit is connected to the input of the regenerator 9. To compensate for the losses during the registration of the NMR signal, the quality factor of the receiving circuit Qc was set higher than the threshold quality factor of self-excitation \({Q}_{c}^{th}\) = 350 by adjusting the level of positive feedback. Magnetic moments of protons entering the receiving circuit excite in it the EMF of generation, which enters the registration circuit 11 after amplification by the resonant amplifier 10 with a gain bandwidth of 170 kHz. A frequency meter and an oscilloscope are connected to the outputs of the registration circuit 11 for monitoring the frequency and shape of the NMR signal. Reconfiguration of the maser generation zone is performed by changing the capacitance of the receiving circuit. For this, it includes two oppositely included variable capacitors (varicaps). An auxiliary voltage with a frequency of 10–20 Hz from the audio generator 12 is applied to them. This voltage modulates the resonant frequency of the circuit, thus causing amplitude modulation of the maser generation voltage. From the intermediate output of the resonant amplifier 10, the amplitude modulated signal is detected and amplified by the low-frequency amplifier 13. From the output of the amplifier 13, the signal goes to the synchronous detector 14. The second input of this detector receives the reference voltage from the generator 12. In the presence of the detuning between the resonant frequency of the receiving circuit and the maser generation frequency, a control voltage appears at the output of the synchronous detector 13. The amplitude and sign of this voltage are proportional to the detuning. Then, it is fed to the input of the control circuit 15, developed on the basis of integrated operational amplifiers. The voltage from the output of this circuit is fed to the varicaps that control the resonant frequency of the receiving circuit to adjust it to the center of the resonant line.
The threshold value Q is determined by solving the equation for the maser in the first approximation and the equation describing the alternating component of the magnetic field in the coil of the oscillatory circuit of the maser using the technique developed for molecular generators in [21,22,23, 27]
where ωc is the resonance frequency of the receiving circuit, ωnmr is the NMR frequency, η is the filling factor of the oscillatory circuit with the working substance, and M0 is the magnetization of the liquid flowing into the oscillating circuit.
Analysis of relation (4) shows that this condition can be satisfied only when M0 = − ǀM0ǀ. Maser generation will occur only upon inversion of the magnetization of the magnetic moments of flowing liquid protons entering sensor 7. The maser frequency ω differs from the NMR frequency in the presence of a detuning between ωc and ωnmr. In this case, the NMR frequency shift Δωnmr is determined by the following ratio:
where k = QL/Qc is the sensor factor and QL is the quality factor of the resonant line of the flowing liquid.
The largest shift of the maser frequency ω from the NMR frequency will be at the boundary of the range, which is determined by the following expression:
where T2 is the transverse relaxation time of the flowing fluid and Q0 is the threshold quality factor at zero detuning.
In this case, the condition for the existence of maser generation is as follows:
where f1, f2 are the frequencies of the upper and lower boundaries of the permissible detuning zone, and f0 is the tuning zone center frequency.
In the developed design of the magnetometer, the ratio 210 ≤ Qnmr/Qc ≤ 240 was provided for the entire set of sensors 7. That is why, such many sensors must be used (26 sensors). In addition, the magnetometer developed by us does not have a delay phenomenon in the self-tuning system. This makes it possible to obtain high accuracy in measuring magnetic field variations. Another important factor that ensures high accuracy in measuring magnetic field variations is the closeness of the maser generation frequency ω to the frequency ωnmr. Our results show that the requirements for the self-tuning accuracy can be reduced by at least an order of magnitude compared to the case of self-tuning for quantum magnetometers. For example, in a potassium magnetometer (e.g., GSMP-35A), the relative error of the self-tuning system for field variations δBa is no more than 10–5.
Our calculations showed the following. To measure magnetic field variations with a relative error of 10–6 in the range of induction variation 0.06 ± Bv T, the value of δBa should be no more than 4.8·10–3 considering relation (4). The Bv can be expressed as, for example, Bv = 0.013·sin2πfvt (where fv is the frequency of variation of the magnetic field variation). Mentioned above requirement is easily met for the entire set of sensors 7 used by us in the magnetometer, since the maximum value of δBa in one of the sensors is 8.5·10–4.
In the developed magnetometer for studying magnetic field variations, the fv value can be varied in the range from 0 to 300 Hz, which corresponds to the real conditions of magnetometer application.
3 Linearization of the Control Circuit of a Nuclear Magnetometer Based on a Maser on a Flowing Liquid
To determine the permissible parameters of the control system of a magnetometer with a self-tuning system, the circuits of quantum NMR magnetometers are linearized. [5, 7, 22, 28]. This is required to provide a relative measurement error of 10–6. In case of magnetic field variations measuring a term, the relative sensitivity or the absolute sensitivity of a magnetometer in a given measurement range is often used.
The frequency linearization method is often used in quantum NMR magnetometers, since the system with automatic frequency control (AFC) used in them is a closed nonlinear system. Figure 2 shows how the magnetometer control circuit looks after linearization (Fig. 2).

Magnetometer control circuit after linearization. Module indexes from 1 to 9 are indicated in the upper corners of the squares and rectangles
Let us consider the interaction of the modules in this scheme. (Fig. 2). Fictitious module 1 takes into account the relationship between the field Ben and the frequency fnmr
where γ = 42.5763 MHz/T is the proton gyromagnetic ratio.
Since a registration of NMR signal is carried out in a weak magnetic field with a uniformity not higher than 10–4, then the measuring error of the frequency of registration NMR signal \({f}_{\mathrm{n}\mathrm{m}\mathrm{r}}\) will mainly be determined by the accuracy of the γ value. The chemical shift that occurs during the signal is recorded in high-resolution NMR spectrometers in such fields is not observed (although it is present). The influence of the chemical shift on the \({f}_{\mathrm{n}\mathrm{m}\mathrm{r}}\) measurement error when measuring the magnetic field variation will be insignificant.
The inertia of the control circuit section from the input to the synchronous detector is determined mainly by the time constant Ty of the low-frequency amplifier (module 2). The transmission coefficient of the circuit section from the input to the output of the synchronous detector is taken into account in the coefficient Ksd (module 3) as follows:
where α is the angle determined by the value of the frequency derivative of the line function at the resonance point. Module 3 also makes it possible to refine the previously obtained condition for the existence of maser generation (8)
The time constant of the synchronous detector is reflected in module 4. The isodromic regulator 5 and the subsequent correcting module 6 provide the required δBa value for measurements with a relative error no worse than 10–6. Module 7 is the result of linearization of the controlled-loop characteristic, where Kc is the transfer coefficient and Tc is the time constant. Nonlinear module 8 takes into account the formation of maser generation with frequency f as a result of interaction of coupled circuits with frequencies fc and fnmr. This is where the frequency is measured, which determines the final measurement result with a multiplier of 1/γ. The use of linearization, as well as the data presented in [7, 11,12,13,14, 17, 20, 23], allowed us to determine the values of several parameters for the magnetometer circuit, which satisfy the requirements for accuracy and stability margin
The obtained parameters are provided by the following parameters of the control circuit (modules 5 and 6), which is implemented based on integrated amplifiers:
where Kir is the isodromic controller transfer coefficient, Tir is the isodromic controller time constant, and τ1, τ2 are the correcting module time constants.
The presence of the synchronous detector characteristic of the type shown in Fig. 2 (module 3) does not allow for modes where the error ǀεǀ = ǀfnmr − fcǀ exceeds 1.81 kHz. Otherwise, the maser generation is disrupted. In particular, this will happen when the input signal changes abruptly ΔBen ˃ 0.43 mT. To form the control signal that returns the system to the operable state after a maser generation failure, a scheme with hysteresis characteristic was used. The control signal from this circuit changes the frequency fc of the oscillating receiving circuit. In this case, one peculiarity arose: simultaneously with this process, the quality factor Qc decreased, which worsened the quality of the entire system. To keep the Qc at the same level, a correcting voltage proportional to the control signal is applied to the regenerator (module 8).
Analysis of the results obtained considering the linearization of the control circuit allowed to establish that the phase margin Δφ is 60 degrees, and the gain margin is 15 dB. These are standard values for stable operation of quantum NMR magnetometers [1, 5,6,7,8,9,10,11,12,13,14,15,16,17, 20, 24, 28, 29].
4 Experimental Results and Discussion
In the developed design of the nuclear magnetometer, the transverse relaxation time T2 is determined in two ways
-
1.
using the decay time of the free induction signal when the spin system is excited by a π/2 pulse;
-
2.
using the decay time of the NMR signal recorded during the modulation of the magnetic field BE with a frequency of 50 Hz when switching the regenerator to self-excitation mode and disconnecting generator 5 from nutation coils 4 (Fig. 1).
This relaxation time is then used in the ratio (3). Figure 3 shows as an example the shape of the recorded NMR signal obtained by modulating the magnetic field BE. The decay of the envelope drawn along the tops of the peaks determines the effective time of transverse relaxation (\({T}_{2}^{*})\) of the flowing liquid. \({T}_{2}^{*}\) was measured by the decrease in NMR signal amplitude to the level of Ut = Umax/10.

The recorded NMR signal from a solution of filtered tap water with alcohol at T = 295.3 K
Relaxation time T2 is then determined using the following relationship [29,30,31]:
where ΔH is the uniformity of the magnetic field where the sensor 7 is placed.
In the developed design of the magnetometer, the uniformity of the magnetic field is of the order of 10–4 cm−1.
In the developed nuclear magnetometer, the value of magnetization M0 entering sensor 7 is an important characteristic during making measurements. The higher the value of magnetization M0, the higher the amplitude of the recorded NMR signal, and therefore the higher the accuracy of measuring the variation of the magnetic field. Thus, there is a need to research the dependence of the NMR signal amplitude U from the expenditure q for the considered sensor 7. Figure 4 shows the results of this research.

Dependence of the NMR signal amplitude U on the flow rate q of a solution of filtered tap water with alcohol at a temperature of T = 295.3 K
The obtained result shows that in the developed design of the magnetometer, there is a wide range of variation of the flow rate q, in which the signal-to-noise ratio of the recorded NMR signal is high (more than 20). Specifically, this range is from q1 = 1.59 ± 0.02 ml/s to q2 = 4.74 ± 0.05 ml/s. It should be noted that this accuracy in determining the value of q is not required for solving tasks for measuring of magnetic field variations with used of developed design of magnetometer. One can restrict oneself to measuring q with one sign after the point.
In this case, a change in flow rate q (even by 10%) will not have a significant impact on the error of measurement of physical quantities during operating in the center of this range q. It is worth noting that such flow rate changes are always present in the pipeline when using a pump to move liquid in it.
The transverse relaxation time T2 was determined in two ways for fluid flow q = 3.06 ± 0.03 ml/s. Using free induction decay, T2 = 23.21 ± 0.18 ms was measured. Using magnetic field modulation, T2 = 23.04 ± 0.23 ms was measured. Measurements for both cases were repeated 10 times to average the data and estimate the measurement error according to standard methods.
In addition, the same solution at T = 295.3 K was studied on a Minispec mq 20 M stationary NMR relaxometer (made by BRUKER company). The measured value is T2 = 23.198 ± 0.065 ms. All obtained values of T2 coincided within the measurement error.
It should be noted that in this case, it is possible to measure T2 with a lower accuracy; for example, one digit after the point in the fractional part. To determine the conditions of maser generation onset (6) and to measure magnetic field variations, such an accuracy in determining T2 will be sufficient. Therefore, in future constructions, magnetometers can use the methods of measurement of T2, which have less high accuracy.
Figures 5, 6 and 7 show as an example measured magnetic field variations for different types of variations Bv at different frequencies fv. Measurements were made using magnetometer developed by us.

The dependence of the magnetic field induction B on time t. Graph 1 corresponds to the absence of forced changes in the magnetic field. Graph 2 corresponds to the slow change in the magnetic field. Graph 3 corresponds to harmonic change of magnetic field with frequency fv = 0.05 Hz

The dependence of the magnetic field induction B on time t. Graph 1 corresponds to the absence of forced changes in the magnetic field. Graphs 2 and 3 correspond to sinusoidal and sawtooth magnetic field changes with fv = 0.1 Hz, respectively

The dependence of the magnetic field induction B on time t. Graph 1 corresponds to the absence of forced changes in the magnetic field. Graph 2 corresponds to the slow change in the magnetic field. Graph 3 corresponds to the sawtooth change in magnetic field with frequency fv = 0.2 Hz
The experimental results showed that when measuring constant (ǀBconǀ ≤ 0.003 T), sinusoidal (Balt = 0.003∙sin2πfvt), or sawtooth magnetic field variations (Figs. 5, 67), the voltage at the output of the synchronous detector does not exceed 0.04 V, which corresponds to the fnmr − fc = 613 Hz. This makes it possible to measure the value of magnetic field induction at the resonant frequency (B = fnmr/γ) as in nutation NMR magnetometers with flowing liquid [6, 24, 26, 29] with a relative error of less than 10–6.
5 Conclusion
The investigations results showed that the self-generating NMR magnetometer developed by us with automatic tuning of the generation zone center to the proton resonance frequency allows us to measure magnetic field variations in the range of 0.0002–0.2 T with relative error of these measurements does not exceed 10–6 both in static and in dynamic regimes. For case when the change at input signal variations with frequency fv ≤ 0.25 Hz and amplitude not exceeding the value from 0.01 to 10 mT, depending on the measuring range. In case of variations measuring of magnetic field, the term sensitivity is often used. This is more correct. In the documentation for magnetometers, the sensitivity value is given for various ranges of magnetic field measurements and its variations. For the magnetometer design developed by us, the minimum sensitivity value is 0.2 nT.
The quantum NMR magnetometers with optical pumping (for example, potassium magnetometer GSMP-35A) or ferroprobe magnetometers can be compared with magnetometer developed by us in terms of accuracy of magnetic field variation measurement. The accuracy of magnetic field variation measuring in these devices is 10–7 or 10–8 (sensitivity 0.1 nT). These devices are operating in Earth field (measuring range from 0.02 to 0.1 mT and below). Meters the magnetic induction in the Hall effect, which are working in the range of 0.0002 to 0.2 T have the smallest error 5∙10–5. All this once again are confirming the using validity by us of the maser with flowing liquid in the design of the nuclear magnetometer to solve the tasks discussed above.
References
M.P. Ledbetter, S. Pustelny, D. Budker, J.W. Blanchard, A. Pines, Phys Rev Lett 108(24), 243001 (2012)
B. Gizatullin, M. Gafuro, A. Vakhi, C. Mattea, S. Stapf, Energy Fuels 33(11), 10923–10932 (2019)
A.S. Alexandro, A.A. Ivanov, R.V. Archipov, M.R. Gafurov, M.S. Tagirov, Magn Resonan Solids 21(2), 19203 (2019)
N. Myazin, Y. Neronov, V. Dudkin, V. Davydov, V. Yushkova, MATEC Web Conf 245, 11013 (2018)
S. Xu, C.W. Crawford, S. Rochester, D. Budker, A. Pines, Phys Rev A 78(1), 013404 (2008)
V.V. Davydov, E.N. Velichko, V.I. Dudkin, A.Y. Karseev, Meas. Tech. 57(6), 684–689 (2014)
A.K. Dmitriev, H.Y. Chen, G.D. Fuchs, A.K. Vershovskii, Phys Rev A 100(1), 011801 (2019)
C. Abel, G. Bison, W.C. Griffith, W. Heil, D. Pais, J. Voigt, Eur Phys J D 73(7), 150 (2019)
F. Allmendinger, I. Engin, W. Heil, U. Schmidt, S. Zimmer, Phys Rev A 100(2), 022505 (2019)
F. Allmendinger, P. Blümler, M. Doll, W. Heil, L. Willmann, S. Zimmer, Eur Phys J D 71(4), 98 (2017)
D.J. Michalak, S. Xu, T.J. Lowery, D. Budker, A. Pines, Magn. Reson. Med. 66(2), 603–606 (2011)
H.B. Dang, A.C. Maloof, M.V. Romalis, Appl Phys Lett 97(15), 151110 (2010)
A.K. Vershovskii, A.S. Pazgalev, Tech. Phys. 53(5), 646–654 (2008)
D. Budker, M. Romalis, Optic Magn Nat Phys 3(4), 227–234 (2007)
H.-G. Koch, G. Bison, Z.D. Grujić, W. Heil, J. Voigt, A. Weis, Eur Phys J D 71(10), 262 (2017)
H.-G. Koch, G. Bison, Z.D. Grujić, W. Heil, J. Voigt, A. Weis, Eur Phys J D 69(8), 202 (2015)
P.M. Borodin, N.M. Vecherukhin, A.V. Mel’nikov, A.A. Morozov, Tech. Phys. 41(3), 245–249 (1996)
R.J. Cooper, D.W. Prescott, P. Matz, M. Monti, J. Okamitsu, Phys Rev Appl 6(6), 064014 (2016)
Y. Dumeige, M. Chipaux, V. Jacques, P. Kehayias, D. Budker, Phys Rev B 87(15), 155202 (2013)
S.P. Dmitriev, A.S. Pazgalev, M.V. Petrenko, A.K. Vershovskii, Opt. Spectrosc. 127(4), 742–745 (2019)
G. Romer, Arch Sci 14, 273–286 (1961)
H. Benoit, P. Friver, L. Guibe, Comptus Rendus 246, 3608–3614 (1958)
R.A. Zhitnikov, I.A. Kravtsov, Soviet Phys 22(3), 381–384 (1977)
V.V. Davydov, V.I. Dudkin, A.Y. Karseev, Tech. Phys. 60(3), 456–460 (2015)
S.V. D’yachenko, I.S. Kondrashkova, A.I. Zhernovoi. Techn Phys 62(10), 1602–1604 (2017)
V.V. Davydov, V.I, Dudkin, A.A. Petrov, N.S. Myazin. Tech Phys Lett 42(7), 692–696 (2016)
L.N. Oraevskiy Molecular generators, (Moscow: Nauka 1964), 295 p.
E.B. Aleksandrov, A.K. Vershovskii, Phys. Usp. 52(6), 573–601 (2009)
V.V. Davydov, V.I. Dudkin, A.Y. Karseev, Instrum Exp Tech 58(6), 787–793 (2015)
E. Andrew. Nuclear magnetic resonance, (Moscow. Instr. literature. 1957), 586 p.
A. Leshe, Nuclear Induction (Veb Deustscher Verlag Der Wissenschaften, Berlin, 1963), p. 864
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Davydov, V.V., Dudkin, V.I., Myazin, N.S. et al. New Design of a Magnetometer Based on Nuclear Magnetic Resonance to Study Variations of the Mid-field Magnetic Strength. Appl Magn Reson 52, 1201–1213 (2021). https://doi.org/10.1007/s00723-021-01373-8
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00723-021-01373-8